#linear-algebra
2 messages · Page 196 of 1
maybe sub J = N+D instead
yea so J^k = (N + D)^k
but don't I have to use the fact that ND = DN
can I just say that?
I'm just trying to see how JD = DJ implies that summation
JD=DJ <=> ND+D² = DN+D²
wait what
J = N+D
oh I see
tho, you can see it more simply
D is a matrix of form \lambda I
those matrices commute with every other matrix
If anyone wants to study for their LA finals, tag me and we can go into VC or sumn

i feel so lost on this question, my professor gave a hint saying use the point slope formula, but even with that im not really getting anywhere
with point slope formula, i have
y - b = m(x-a)
y - d = m(x-c)
from here, i dont know what to do. I tried rewriting the equations as
y - mx = b - ma
y - mx = d - mc
to maybe resemble something similar to a system of equations, but i dont think thats right
I need a tiny bit of help
can you write that determinant equation explicitly?
might be a good idea for a starting place.
the sum of the dimensions of all eigenspaces of an nxn matrix cannot exceed n
can someone help explain why
ok ill try that
i may be missing something but im not getting anywhere
xb - xd - ya + yc + ad - bc = 0
i tried factoring it but nothing linked to the first two equation

Multiplying A by a scalar will not make the determinant the product of that scalar and the determinant
the determinant will be scaled by a^n where a is the scalar the matrix is being multiplied by and n is the dimension of the matrix
so in this case it would be 2^(4)
ohhh
det(2A) = det(A) * 2^4
thank you for explaining
sure
okay ill try that and see where that takes me
Mr. Stewart

my brain hurts honestly

how do we determine the Q that makes this diagonalizable
well actually, if $$a, b$$ aren't distinct, i don't know if it even is diagonalizable
Mr. Stewart


can you row reduce?
im not sure tbh
sorry
i can attempt many times without an issue
but ofc i wanna understand the logic of doing this
idc about the mark
Well there is a general method that works every single time, but in this case you can do a short cut
Ok so I will first talk about the short cut i guess
i appreciate it btw
So the last equation tells you that x1 = -3-x4
yup
now you can substitute this into the first equation and get $-3-x_4+x_2=-2$ or $x_2=1+x_4$
Whoever

Now substitute this expression for x2 into the second equation
you get x3 = 1-x_4
so now you have three equations: $x_1=-3-x_4$, $x_2=1+x_4$, and $x_3=1-x_4$
Whoever

So in this case x4 can be anything and then x1 x2 x3 are all determined based on x4
alright
yes
thank you so much
now just saying one thing
sure
you see how the equation is written in the form v+sw where v and w are vectors
the column vectors
the places where you can put answers
yes
what what you were supposed to do was
write what the xs equate to
find a particular solution to this equation
so like maybe x_4=1 and calculate x1 x2 x3 and put that in the first column vector
then you find the general solution if all four numbers on the right -2, 2, 1, -3 are 0's
alright
s is used as a free variable; here it means s is allowed to take on the value of any real number
thanks 🙂
is there a 1-1 correspondence btwn
We can tell easily that A can be diagonalized since it has distinct eigenvalues, however is the case for B, since B has a repeat of eigenvalue of 4?

all pos def matrices and inner products? in some finite dim vector space
you can check whether its diagonalizable by span of the second eigenspace
dimension*
so look at null space of A-4I, if its dimension is 2 then ur good
@pseudo thicket wiz are u from ma1508e
what is that?
I'm not taught that yet, sorry!
sorry i tot u were in the same math course as me
ntu?
im nus
im ntu
eh idk how else to explain it then, sorry
ah lol
but what is the difference between diagonalization and orthogonal diagonalization?
the idea is if you want diagonalizable then the eigenspace must have dimension n
in this case n = 3
im not there yet sorry
orthogonal diagonalization is when the matrix is normal
yup understood this, however from the picture we see that B has only 2 distinct eigen value, that means only 2 distinct eigen vector can be found, right?
just use symbolab it teaches u btr
no not necessarily
a repeated eigenvalue could produce an eigenspace that has larger than dimension 1
@mortal juniper what is symbolab 可以吃的吗?
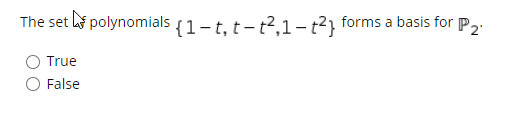
Can anyone help me understand how to do part a
It's unlike any other basis question I've seen before and I'm not sure what the first step is
looks complicated af
I thought you had to be given what x was and then use the basis to find what [x] should be
yes
why did u think im from ur course tho
cant tell directly yeah?
ah haha
how though?
We can tell easily that A can be diagonalized since it has distinct eigenvalues, however is the case for B, since B has a repeat of eigenvalue of 4?

yes
find the eigenvectors and see if they're independent
cos there are 3 distinct eigenvalues
and thus it can be diagonalized
B is not
cos it only has 2 distinct eigenvalues
time to do an evd in matlab then
what do u mean easily^
oh wait your yes was to my question
arent u supose to eigenvalue your matrix manually
like, we can just look at digonal unique entries boom we can easily tell it's diagonalizsanble
if it is diagonal matrix with unique diag entries we don't need to calculate eigenvalues

upper triangular matrix isit
any triangular
what course r u studying
ee, u?
ty dude, looks like it may or may not be diagonlizable
depending on the matrix
pit depends on the number of lin indep eigenvectors

you have no way other than finding them
thank you
i dont know why i am learning engineering math :^(
isn't comp sci a branch of ee?
also, the more theoretical part of computer science has some really fancy math
not really exposed to the practical application
also i dont see my future self applying calculus in cs
what do you plan on doing with cs
software eng
you didnt need cs then
ai and ml and things like that
need that in this country

software eng is super super not related to ai and ml
ai and ml is literally calculus, statistics, and linalg
depends which branch, no?
no
anyway, in cs you'll learn how and why all of that stuff works. computational complexity, computability, the math behind ai and ml, etc
why here so many sg
@brazen venture sus as in wat lol
if you had studied informatics, you would only study how to use those things
yeap = cs = lowkey math course
cos we are HELP vampires🧛
lmao
do u have a lot of china profs in your uni?
depends on which course they are in?
btw how can we find the limits of a matrix as the power of that matrix goes to infinity?
diagonalize?
not in my school
k nvm im asking a dumb qn
but can a matrix be a limit
lets say if they ask me find the ans for this question
and my ans is (0,0,0,0)

im pretty sure A can be normal too 🤔 for it to be orthogonally diagonalizable
@mortal juniper you're asked to find the limit of a sequence of vectors
The spectral theorem states that a matrix is normal if and only if it is unitarily similar to a diagonal matrix, and therefore any matrix A satisfying the equation A*A = AA* is diagonalizable.
unless im not understanding what orthogonally diagonalizable means hm
so a limit is a value and it cant have vectors
yea i thought limits are only discussed when you have a normed space
these things do make sense to talk about in real vector spaces.
we have a norm lol
anyway
A/6 has eigenvalues 1/2 and -1/6
yes
so yeah you are correct you'll have your sequence approach the zero vector
wait im confused whats the definition of convergence to vector? any norm right
@dusky epoch but the qn asks me to find the limit, so do i put 0 or (0,0,0,0)?
(0,0,0,0)
ah i think i get it right
i said "the zero vector"
what are like finite dimensional VS that is not a normed space, I thought you could always represent stuff in coordinates and that would produce a norm
unless the field is wacky?
i mean
there's no canonical norm on the space of polynomials of degree <=k
you can have many different norms
for finite dimensional spaces all norms are equivalent
(in the topological sense)
oh, i thought the canonical one would be the absolute value lol
wait hm
right you need maybe something like $max_{x \in [a,b]}|f(x)|$?
Anticipation

and ig that would no longer be space of polynomial but on an interval
\max
how do we know that we can do the "in other words" part?

oh i think i might see why
yeah they establish that you can do this by induction basically, nvm my question
There is a 1-1 correspondence between all positive definite matrices and all possible inner product right? Given that you chose some basis
In other words, I would think if x,y in R^n and A is a positive definite matrix then (x,y)_A = (y,x)_A
and how about just semi-positive definite, I assume this also holds
its just that instead there is more zeros
with positive semidefiniteness, it just changes the result from > 0 to >= 0
(when looking at the inner product of x with itself)
Is it true though that all inner products on C^n can be represented by positive definite matrices, given that you choose some arbitrary basis B? or I think that basis has to be orthonormal?
hm i believe if it was orthonormal basis then the PD matrix would just be identity
so i guess arbitrary basis
nvm this statement is true i found it
wait i got it
also how do you show d^(k) is indeed a descent direction

you show that f(x - ad) < f(x)
the common approach is to use a 1st or 2nd order taylor expansion around x
ah thx
There's something in my notes about metric spaces which I think is a mistake
shouldn't this be the other way around?
so d(x,x) = 0
d(x,y) = 1
yeah
thanks

Assuming A inverse exists, just multiply that equation through by A inverse
@coarse sandal
Then the -4I term will have an A inverse that you can solve for
Can we use matrix multiplication on non-linear transformation
srry for a dumb question
my linear algebra course is mainly focused on computations
how would you define matrix of nonlinear map
you can for computing gradient
or i mean
jacobian and hessian in general
For a bilinear form isnt it true that if $(x,y)=0$ then $(y,x)=0$
bert

Only for symmetric bilinear forms
adding 0 a bunch of times to (x,y) doesnt make it the same as (y,x)
consider a bilinear form on R² given by (x,y) = x1 * (y1 + y2) for x = (x1, x2) and y = (y1, y2)
then for the standard basis vectors e1 and e2 we get (e1, e2) = 1 but (e2, e1) = 0
break it up into individual steps, there's several illegal moves going on here
can someone explain the last part in blue..?

the transpose of a scalar is the same scalar, basically
but they are all vectors,,
Au dot v is a scalar
the dot product gives you scalars
also what you sent already has the explanation
Au dot v = v^T A u
it's in the first line with blue stuff highlighted
so its like the same thing? as the last part basically?o-o
v^T A u is a scalar, and its transpose is the same scalar
the whole first half of the page says the same thing in like 3 different ways
for this qn, what are we expected to show for part b given that we have solve part a for its A=PDP^-1

look at what happens when you raise 1/6 A to an integer power
you'll get (1/6)^2 P D P^-1 P D P^-1 = 1/6^2 P D^2 P^-1 if you square it
i'm sure you can already see the pattern
Find the 20th term of the arithmetic sequence whose common difference is d=3 and whose first term is a1=5 .
wrong channel


isnt the final matrix

no you don't X out the P and P^-1 matrices
$A=PDP^{-1}$ means $A^2= (PDP^{-1})(PDP^{-1}) = PD^2P^{-1}$ notice how the inner $P^{-1}P=I$ cancels out here but the outer ones are still there? @mortal juniper
Merosity


it's rank 1, as expected. that's all i can comment
what does the a,b,c,d mean, is it even useful
just some generic 4d vector
so are they actually asking for the limit of A which is the 4*4 matrix of 1/4?
you can interpret it as meaning as you continually do the A transformation on any vector it eventually gives you something that looks like the average of all the entries of the original vector
well, (1/6)A I should say
ok thanks!
for this question

can i just neglect the imaginary part
or do i have to make a new variable such that it contains imaginary solution
iirc you can absorb the imaginary part into the constant
are all linear transformations diagonalizable?
nvm
how can you tell what has determinant 1

a e f look the moist similar to a
the volume is preserved
what you noticed as "similar" in those letters is that the lengths were preserved
and the product of the lengths is the "volume"
notice B also looks similar to the original figures, but it wasn't only rotated, it was also enlarged
enlarging changes the volume
D and G had a length shrunk down to 0, so that has volume 0
i don't have a nice and easy argument for the shear in C
for D and G, do they have eigenvaluie?
probably sqrt(2) and 1 for one of the eigenvalues and 0 for the other
ah, that's different
i was asking if its true that B and F dont have real eigen values
thats what i guess at first glance im not sure if there are others
you can create the corresponding transformations as matrices and check yourself
does subset of a basis for R^2 mean something like pics A / B?

How would i go about balancing this equation? Havent done chemistry in a while but I feel like I should revive my linear algebra to complete it. Could I find the nullspace vectors and they would be my coefficients?

is $A = PBP^{-1} the same as A = P^{-1}BP$ in the context of similar matrices
add

it isn't unless P is an involution
you can write one in the form of the other by doing a substitution for some other matrix V = P^-1 though
What's the simplest way to see this?

I guess one way to do it is to introduce a basis ${e_1,\dots,e_m}$ for $V$ seen as a \textbf{complex} vector space, and try to reason that ${e_1,\dots,e_m,Je_1,\dots,Je_m}$ is then a basis for $V$ as a \textbf{real} vector space. But this is done later in the chapter, which leads me to believe there is a simpler way to see it here. Let's assume that $V$ is finite-dimensional, I'm pretty sure this is an implicit assumption in this context.
is this a matter of substituting each value?

gustavn64

is the linear transformation induced by a 2x2 elementary matrix mean the matrix is diagonalizable?

w^3 = 1
hi sorry to ask this again but i was wondering what it meant when for a subspace $V \subseteq R^2$, which sets are a subset of V

add

Are you asking what it means for a subset to be a subspace of a vector space?
3 criteria
1: the subspace must contain the 0 element of the original space
2: it must be closed under addition of vectors meaning addition of any two vectors in the subspace results in a 3rd vector still in the subspace
like which of those images are subsets of V?
Which of the drawings in the image could be possible subsets of $V \subseteq \mathbb{R}^2$
add

where V is a subspace
AFAIK, and I don't know much LA, all of A, B, C, F, G, and H are subspaces of R^2
@steel moon
sorry
lol its ok
I read your question from previous and restated it
give me a sec
they are subspaces of R^2
was what I meant
I'll edit the original above
why not D? 
<@&286206848099549185>
is it a subspace of V
or a subset
so is the question "whihc of the following could possibly be a subset of a subspace of R^2"
well that would be what is written in a problem
unless V is a specific space given to you
I didn't understand the answer to the problem
can i say these two matrices are similar if their detertminants are the same?

add, that is not polite
which of those pictures are subsets of a subspace of R^2?
i am in the middle of giving an explanation to 0.1
cause 0.1 was the one who pinged helpers
explain it to me after you answered Add's recent question
its ok lol

first one: R^2 is a subspace of itself. so any subset of R^2 is also a subset of some subspace
you could even take a finite set of vectors
they dont have to form a subspace themselves
but if all it needs to be is a subset of a subspace
everything workd
works
2: no, two matrices are not necessaruly similar just because they have the same determinant
although, if they are similar, they will have the same determinant
are those two matrices similar?
seeing the determinant of a 2*2 matrix as the area of a whatever it is called, you can imagine two different shapes with the same area
no
what was the shape called for which the determinant of a 2*2 matrix is the area?
a parallelogram?
why this one isn't similar or why it isn't necessary similar when the determinants are equal?
there are other properties preserved under similarity
why is euclidean geometry annoying
The two matrices are not similar
Every matrix is similar to a jordan matrix
Jordan matrices are made up of jordan blocks
And two matrices are similar iff the jordan matrices they are similar to have the same jordan blocks
The matrix B is made up of two jordan blocks with eigenvalues 2 while A is made out of 1 jordan block with eigenvalue 2, so they are not similar
Another way to see it is that $B=2I$ so any matrix similar to $B$ will be $M\inv BM\inv=2M\inv IM=2I=B$ and so $B$ is only similar to itself
Whoever

@wary lily @rain echo @steel moon
yeah I just got busy and didn't come back
I didn't think I should explain jordan blocks or eigenvalues
thanks



If I know the eigenvalues of a matrix, and I also know that the matrix is diagonalizable, can I get the characteristic polynomial from the eigenvalues without computing it the normal way?
What is normal way? Determinant?
Yea
Yes, you can
How can I be sure there isnt some constant factor outside, though
like a(x-lambda1)(x-lambda2) etc
If it's diagonizable, simply look at the main diagonal
Free Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step
but
so lets say the eigenvalues are 1,2, and 3, and its diagnoalizable, then it would be (x-1)(x-2)(x-3)
but how do i know its not -(x-1)(x-2)(x-3) or something
IT will have only one solution for the polynomial given that you find the determinant correctly
wdym
Matrix addition, multiplication, inversion, determinant and rank calculation, transposing, bringing to diagonal, triangular form, exponentiation, LU Decomposition, solving of systems of linear equations with solution steps
but the point is, im trying to find it without the determinant
so i know you can go chararacteristic polynomial -> eigenvalues
but im trying to figure out whether this is reversible

In studying linear algebra, we will inevitably stumble upon the concept of eigenvalues and eigenvectors. These sound very exotic, but they are very important not just in math, but also physics. Let's learn what they are, and how to find them!
Script by Howard Whittle
Watch the whole Mathematics playlist: http://bit.ly/ProfDaveMath
Classical P...
This will explain all
If you know it's diagonaliziable, iirc the diagonal entries will be the eigenvalues and the # of times they show up is the algebraic multiplicity
right
so i at least know the polynomial without a possible constant
im trying to understand whether or not there could be a constant though
yes you know the polynomial up to a scaling factor
but the scaling factor doesnt change anything about the roots, and subsequently the spectrum
right
so just say the scaling factor is 1 
i just wanted to verify there is indeed a scaling factor that is unknown when going from the eigenvalues
yes cause the only numbers you'd have to plug into the char poly are the eigenvalues
great thanks that answers my question
but you already know $P(\lambda) = 0$ so they dont help find a
moshill1

Anticipation

like non-naive way
cuz $v^\top v$ is O(n) and i would think potentially every inner product can be computed in O(n)..?
Anticipation

but maybe that requires pre-computing the laws of the inner product

did I do the maths correctly?
its least squares using a regularization term in the end (ridge regression, but that doesnt matter)
i've never seen this written out as sums before, my brain melted
can someone help me with my optimization problem

@lavish jewel oh you helped me before with some type of differential equation
oh, really?
yeah was like 5 months ago or something
wow what
anyway, gimme a sec to write this out in matrix vector form and double check
wait a second
the derivative
is it correct?
my next step is to write it in matrix form and i dont know what to do with the B_0 as it is a constant actually
i will check that rn
the overall form looks ok, but some things are not
the last part has a sum of 2 alpha * sum(beta_i)
but all the b_i where i =/= j are 0
so you don't need the sum, only 2 alpha beta_j
it's possible the left part also has a similar mistake
what do you mean by b_i = 0, where i =/= j when the sum is from j = 1 to some number p?
you're differentiating $\alpha(\beta_1^2 + \beta_2^2 + \cdots + \beta_P^2)$ w.r.t. $\beta_j$, yes?
Edd

so $\frac{\partial (\alpha(\beta_1^2 + \beta_2^2 + \cdots + \beta_P^2)#)}{\partial \beta_j} = 2 \alpha \beta_j$
Edd
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

the notation in the image is bad to begin with, because it may lead you to believe you differentiate w.r.t. EVERY b_j, but that would yield a gradient vector
so this is poor notation at work
do you want a partial derivative, or all of the partial derivatives?
ai ai ai
k so i think its all Bj from 1 to p
my al is to minimize this least squares function
with regards to every b except b0, because b0 can be calculated seperately
so what would be the right notation? would the right notation be $\dfrac{\delta J(\beta_(1..p))}{\delta \beta_(1..p))}$
Ronaldinho777

this is my first time deriving anything in matrix form
i would do it for a single beta_k at a time and put them in a vector
or directly in vector form, for the vector beta
how would you incorperate the b0 in matrix form
a vector of ones multiplied by b0, if it's just a scalar
Sorry to interrupt, I have a quick question to clarify : If B is set of n-1 linearly independent vectors then clearly B is a basis of Lin(B). Then Lin(B) has dimension n-1. Is that correct?
My confusion arises from the fact that my textbook says Lin(B) has dimension at least n-1
is Lin(B) the span of B
it didn't say B has at most n - 1 linearly independent vectors
it could have n
in which case the dimension is n
etc
@wintry steppe
oh i misread
well
Yes
i guess the book just has shitty wording. you're right
either that or they actually meant to write "contains n - 1 linearly independent vectors"
Thanks for the clarification @wintry steppe !

PS: I would like to know how to prove that the trace is -a_n-1
do you want hints for both parts?
or just the trace part?
I've done the determinant part, it's pretty straightforward with x=0
yes
For the trace, I have the idea of expanding the determinant of (xI-A)
But that looks complicated
Trace of a matrix is equal to the sum of the eigenvalues
I am interested in a proof from "first principles". While your statement is true, its proof relies on the statement I am trying to prove
I mean you just wanted to know how to prove it, so I gave you a hint
if you wanted a fully flushed out proof, probably best to specify that
Apologies, should've done that 😄
you could just write out the determinant of xI - A and stare at it to figure out what the linear term's gonna be

@sage verge a solution to Ax=b exists
so it just means there exists a solution x?
that's what i mean
alright thanks
sorry sometimes i just get confused and kinda need to restate it to make sure i dont have the wrong idea
sure np
Does anyone have a recommendation for intro to graph theory?
If I have two basis vectors which are not equal. And I take one and subtract it from another, I am guaranteed to never et the zero vector.
Is this easy to prove?
if you have two non-equal vectors and you take one and subtract it from the other, then you never get the zero vector
no, like
if you have two anythings and they're not the same, then the difference between them isn't 0
numbers, vectors, chairs, anything
this is exactly as easy as it deserves

okay, so it's the only thing i need to justify that if a linear map sends two basis vectors to the codomain, and theyre equal in the codomain under the transformation, then the linear map is sending those two basis vectors to the zero vector
TYTY
im confused how to do this

what did you try?
recall the definition of eigenvalue and eigenvector; an eigenvector is a vector $v$ so that $Av = \lambda v$ for some scalar $\lambda$, which is the eigenvalue associated with $v$. You'll just need to compute $Av$
Nicholas

Hi may i ask if i have this matrix that has the following eigenvectors

how do i proof that (1,i) is an eigenvector of the above matrix
i cant just flip the rows of the 2nd eigenvector right?
@mortal juniper can you directly apply the def of eigenvector?
no
i know the definition but idk how u can just swap the rows of the eigen vector to proof that it is an eigenvector of A
they are not swapped, they are multiplied by i
can you compute A(1,i)?
yes. can you factor it as L(1,i) for some scalar L?
L is 2
are you sure that vector is 2(1,i)?
R1= 2(1+i), R2= 2(-1+i)
no, after factoring out L we must be left with (1,i)
again, we're finding L so that (2+2i,-2+2i)=L(1,i)
sry im not so sure how to factor out a 22 matrix to a 21 matrix
i know that if i take this eigenvector

multiple to i
i will get (1,i)
he is asking you to factor a scalar from a vector
there is some constant c such that c(1,i) = (2+2i, -2 + 2i)
if you show that such a constant exists, then (1,i) is an eigenvector of the matrix
by definition
hint: the constant is exactly that eigenvalue. try it out.
but how do i find c
and what's 2 + 2i times i
-2+2i
so what conclusion have you reached?
interesting
a good way to find such an L is to focus on the entries of the vector separately
look at the 1st entry 2+2i. what can we factor out to get 1?
2+2i
look at the 2nd entry -2+2i. can we factor out 2+2i to get i?
yes
that means we can factor 2+2i from the vector to get (1,i)
ok thanks a lot
this should be a reminder to you that any scaled version of an eigenvector is also an eigenvector
taking L=2+2i, we verified A(1,i)=L(1,i)
the scaling was i w.r.t. the vectors you found previously
ie (1,i) is an eigenvector of A (corresponding to an eigenvalue 2+2i)
The sum of two subspaces is direct if their intersection consists of the zero vector only
Also, a minor correction in your argument : eigenvectors corresponding to distinct eigenvalues are linearly independent
if T is diagonalizable then you can find a basis of V such that the matrix representing the transformation with respect to that basis is diagonal. But isn't it the same as with normal diagonalisation of square matrices? The matrix [T]B is the same as the diagonal matrix you obtain with entries of the main diagonal corresponding to the eigenvalues. If you can't see this directly, you can use the formula for [T]B : the columns of this matrix are [T(u)]B for every u in the basis of B
But then if such matrix exists, that means you get just enough eigenvectors to span the whole space V
If it was diagonalizable, then you could write any vector as a combination of eigenvectors where you can further group the eigenvectors into the distinct eigenspaces, where now if you assume that the vector is 0, then each eigenspace will have to be 0 because the eigenvectors are linear independent
to be able to diagonalize a square mat, all you need is linearly independent eigenvectors
as an example, take the identity matrix of size 3x3
the eigenvalues aren't distinct
it is trivially diagonalizable as I I I^-1 though
Enough linearly independent eigenvectors
Otherwise you get a JNF
yeah, i meant all of them lin indep
The key point here is that you should have as much lin independent eigenvectors as the size of the matrix
So I’ve been trying to prove something all day that’s not true....
Given two distinct vectors in the domain, if the linear transformation sends both to the same vector, then they both get sent to the zero vector in the codomain..... which is not necessarily true
Like if you take R3 and send every point to R2, by a projection to the xy plane....
that's indeed not true
That’s linear, but an infinite number of distinct vectors in the domain get sent to non zero vectors.
it's their difference that gets mapped to 0
do you know what the null space is?
domain vectors that get sent to zero in the codomain.
yep
so say Ax and Ay have the same image
Ax = Ay
then Ax - Ay = 0 (the zero vector)
by linearity, A(x-y) = 0
which means, by definition, that x-y is in the null space
so x and y share the same component in the complement of the null space
oh...see i have that written out on my scratch paper. Ax-Ay = A(x-y). and i was trying to manipulate it somehow.
Is it true for diagonal matrices and for any function that f(M) would be just taking f(each diagonal component)?
like for example sth like this

is it actually true for any kind of function?
how are you defining f(M)?
if youre defining it as a matrix-valued function, then f(x) doesnt make sense in general for diagonal entries x
otherwise i dont think you can define f(M) in the general case
like if f(x) = x+1, whats f(M)?
oh I see the problem
you could, i suppose, define it as M + the identity matrix
but you can see that this might be hard to do with less well-behaved functions
if f(x) = |x|, whats f(M)? if f(x) = number of prime numbers at most x, whats f(M)?
that said, for "suitably well-behaved stuff" we often get properties like this
yeah it's not gonna work for all functions for sure
whats "really going on" is just that diagonal matrices multiply really well
so if your function boils down to multiplication
then yeah, its multiplication will be compatible with diagonalwise multiplication
matrix exponentiation does ultimately boil down to an (infinite sum of) matrix products, so that works
and the factorial works as well
yupp I know this too, I saw sin(M), ln(M) and other funny things so I thought that it could be generalized for more types of functions
now I understand that it's only those well behaved ones
yeah you can do some weird stuff for sure
with a power series expansion
Thank you for your willingness to help last month, and your patience with me @wary lily , @lavish jewel , @nocturne jewel . Couldn’t have passed without your insights

typically we only bother to do this for things that behave well when generalized to matrices
and "diagonal matrices respect multiplication" is usually one of the criterias by which we judge that
so its kinda circular
cool stuff for sure
What are the prototypical examples of infinite dimensional vector spaces?
- F^∞
- P(ℝ) set of all polynomials with real coefficients.
- ℒ(V,W)
what else could I add that would be instructive?
I'd say that the set of all continuous functions on some interval would be good too
Set of mxn matrices maybe
ℒ(V,W) is only infinite dimensional if either V or W is infinite dimensional
that's not infinite dimensional
Oh I can't read
In general, assuming axiom of choice, any infinite dimensional vector space is isomorphic to F^S where S is a set of infinite cardinality.
Do eigenvalues = 0 have any corresponding eigenvectors?
Oh!! Very good catch. Tyty
Do you know what it means for a number to be an eigenvalue?
Axler waxes poetic about this. It kinda blew my mind.
Yeah I do, Mv = lv
l is the lambda eigenvalue
OH true that's a necessary assumption
a is eigenvalue of M iff there exists non-zero v such that Mv = av
What do you call such a v?
an eigenvector, right?
yea
so an eigenvalue of 0 means that the span of those corresponding eigenvectors gets mapped to 0, right?
M has an eigenvalue of 0 iff there exists a non-zero v such that Mv = 0
I think that's a yes then
try to be sure then
I'm humbled 😅 . I don't really know much. Thank you

Would e1 here be the unit vector version of vector v?
furthermore what would be alpha here?
i'm really struggling to understand this slide
I don't get how Hv = v - u
how could v - u be a reflection in the plane with normal u?
here
What are you struggling to understand?
just it in general
Can you specify what you mean by matrix theory
If you're talking about grad school stuff, I'm not really able to help much
What do you struggle to understand about it?
Are you trying to prove these things?
And they're gone...
@split oak asking to "explain the entirety of matrix algebra" is a very tall order
yes i agree with u
i could just hire a professor i might
"hire a professor" 
maybe you could ask more specific questions or issues that we could try to address
yes zoom call
is the inverse of a transitive closure always equal itself? For a matrix
squirtlespoof

write (first matrix) = Q(second matrix)Q^(-1) and square the equation
these ones work though
let A be the first matrix and B be the second. B^2 = 0. if A = QBQ^(-1) then A^2 = QB^2Q^(-1) = 0. but A^2 \neq 0, so they can't be similar
@wintry steppe i thought the dude was giving an answer to my question for some reason, cause it was coincidentally both about matrices

more generally, if A is nilpotent and n is the smallest integer with A^n = 0, then the same goes for any matrix similar to A
so like
that's a good thing to look for
more generally even. two matrices being similar means they represent the same linear operator just on a different basis
which makes this property and many others immediate
hi guys
how can i use legendre polynomios to find a minimun of a function?
can I always say that a transformation from one homomorphism to another is linear?
Oh I mean
So it doesn't quite make sense to talk about transformations from one homomorphism to another
the homomorphism as the vector space of the transformation
No
A vector space homomorphism is a linear map
They're two phrases used to describe the same mathematical object
wdym I thought you can do a transformation like T: Hom(v,w) -> Hom(v,w)
can you give an example
Sure, you can
But you must realize that T is not an element of Hom(V,W)
If it is linear, then it is an element of Hom(Hom(V,W),Hom(V,W))
so I'm asking if T is always linear, because linear transformations are matrices so I can always do (S+aU)v = Sv + aUv when S,U belong to Hom(V,W)
Of course not
T doesn't have to always be linear
T is just a function between vector spaces
In fact, you don't even need to consider Hom(V,W) as a vector space. It is just the set of all linear maps between V and W. You can choose to give it a vector space structure but this isn't necessary
So, you can always just talk about T: Hom(V,W) ---> Hom(V,W) as a map without ever bringing linearity or vector spaces or whatever extra structure you're thinking about into the picture at all
@olive tinsel
isn't map the same thing as transformation
Sure
For me at least, when I think about 'transformations', I usually assume that the mapping between two sets is also doing something to the operations on those sets (whatever they might be)
So, a transformation is a mapping with something else going on
But terminology may differ, obviously. Just use what you're most comfortable with and keep the definitions straight in your head
Hi guys, I cant figure out why when applying the permutation I end up applying the inverse instead

Thank you in advance
after 1 goes to 4 it stays at 4, because 4 doesn't appear again in the next tuples etc
this is probably #discrete-math tho
so does it the first line read '4 is the new number 1' or '1 is the new 4'
i keep getting reversed results
i think '4 is the new 1', right?
i jus learned that vectors are linearly independent if the only linear combination of them that equals zero is the one where all the vectors are multiplied by zero/all their coefficients are zero
and it made me think about how a matrix A is invertible iff Ax=0 has only the trivial solution
could someone explain the connection between a matrix being invertible and it having linearly independent columns? like, why is that the case?
also if im misunderstanding anything feel free to point it out
see theorem 6.1 here https://inst.eecs.berkeley.edu/~ee16a/sp19/lecture/Note6.pdf
(note that it missed the requirement that A is square)
thanks!
basically the idea is
we can translate the expression Ax = 0 to a statement about the sums of columns of A
where the vector x is our scalar multiples
so saying "the only solution to Ax = 0 is trivial (i.e. all entries of x are 0)" is the same thing as saying "the only linear combination of the columns of A that equals 0 has all scalars 0"
the rest of the proof just does algebra using that fact
gotcha, i guess i was expecting the connection to be deeper but after reading it a few times and thinking ab it it just seems really obvious
thanks again
linear algebra is interesting in that a lot of the difficutly comes from parsing the definitions
if you really understand what the definitions are saying, a lot of things follow very quickly
without much work
nice, ill keep that in mind
I'm having trouble understanding the last part of the highlighted section. Why do we take the square root of the eigenvalues and why can we write A as the product V sqrt "and logic symbol"?

thats just the construction they use
can you follow why AA^T = Sigma?
it requires the values to be set to the ones given
in order for the algebra to work out
also, just so you know: that ``and logic symbol" isn't actually a logical and $(\land)$, its a capital Lambda ($\Lambda$)
Namington

Thanks for the clarification with the symbols. For AA^-T we get a symmetric matrix, that I follow
Question: Can someone please explain inner product spaces. I was a bit confused today in class
are you already comfortable with the notion of a vector space?
the idea is that we can "add on" more operations to vector spaces
and one type of operation that we often like to study is the "inner product"
which is a sort of generalization of the dot product
I need some help understanding a proof related to inner product spaces
Specifically where this one equality comes from
lemme get a screenshot

lmao I saw that message
anyways yea idk where this came from
it's using the induction hypothesis I suppose
from (1)
how tho
If a=b+c then <a,x>=<b,x>+<c,x>
(1) is a vector and this bottom line is an inner product
Yes
but I'm strugging still to see the pieces
still struggling. I know the properties of the inner product but I can't see how it implies use of the induction hypothesis
The induction hypothesis is used in the next step
wut
isn't the next step just <v_i, v_j> = 0 when i =/= j and v_i and v_j are orthogonal
By induction
ok then I'm more lost >_>
You assume {v_1,v_2...v_{k-1}} is an orthonormal set
It looks like they're using v_k = w_k - this summation
And use that to show {v_1,v_2,...v_{k-1},v_k} is orthonormal
You are trying to construct an orthonormal basis
So,You need to make sure at each step of adding a vector,the basis,the set remains orthonormal
Yes

I got ||u_2|| = 1/sqrt(48)
so shouldn't x - 5/4 x^2 be multiplied by sqrt(48)
not 1/sqrt(48)

Yea it should √48 times that
ok so the answer for the bottom one should be does not equal
cause the constant is wrong
cool so I gotta tell my teacher that it's wrong lol cause she has it that equals is the right answer
@limber sierra could you further explain how AA^T is rewritten from yesterday (from the picture I sent) if you have time. (sorry for pinging!)
i would argue that formulation is not the most intuitive
you could instead use the eigenvectors and eigenvalues of A (which is basically the same thing, but saves you the square roots) and build AA^T from that
what happens if we apply linear transformation repeatedly?
it depends on the type of linear transformation, right?
if it's just a scaling, it will keep extending, if it's a rotation, it just keeps rotating about x degree, right?
you get closer and closer to a vector parallel to a scaled version of the singular vector corresponding to the largest singular value of the mat
could you explain in simpler term?
how familiar are you with eigen-shit?
i have just started learning it
if matrix prefer one direction, many matrix multiply prefer this direction too
why use many operation when few do trick?
I understand how to translate between different notations of permutations. But I fail to understand how to apply the permutations to the list

1 gets mapped to 4
If permutation is (... a b ...) it means a gets mapped to b
@wintry steppe
So for example take (123)
That would map 1 to 2,2 to 3 and 3 to 1
Thanks @native rampart. To clarify, for example, (...a b ...). A maps to B, right? OK So. Does that mean that in the new rearraged order, in the bth position I will find a, or in the ath position i will find b
in the example I have above, (1 4 8 6 5) Would I say, 1 moves to the 4th position or the 1st position is now occupied by 4
whatever was in ath position will be in b th position now
So thing in 1st position moves to 4th position
ok. let that sink in gime a minute
So then when I used that, I get 5 7 3 1 6 8 2 4
But I thought I should have gotten 4 7 3 8 1 5 2 6
Yes
I thought that because isnt the bottow row of the 2 row notation meant to be what it should look like when the permutations are applied. Am I wrong then?
this is correct, I think drunk meant that your initial thought was right
I'd appreciate if someone could explain this to me via voice for 1 min. This is getting me too confused. Thanks for the effort though
is the conjugate transpose of a scalar product the equal to the scalar product of the conjugate transposes of the individual vectors?
the scalar product of two (complex) vectors is a complex number so how do you define the transpose of a complex number?
i had to prove this identity (from an introductory lecture in quantum physics)

given this identity

Hm. What is a|b?
this simply defines a scalar product in the vector space that were working with
but i tried it and it led to a pretty simple solution so i guess that idea was right
Ok! In my courses the inner product is given by <a,b>
yeah quantum physics uses the Dirac notation which looks a little different
workin on L2 (Hilbert), if i am given a dot product, how can i proof any subspace is orthogonal?
in this case, with a dot product i have to check if z^n is orthonormal
You mean you want to show every vector space has a orthogonal basis?
no

{kind=link}
it sais
Proof z^n is orthonormal on this space
and that is the dot product
You have to find a space such that z^n is orthogonal to that?
and i am working on L2 Hilbert space
no
XD
again, i have to proof z^n is orthonormal
Yes,just pick an arbitrary vector of the given vector space and dot with z^n
If that comes out to be zero,you get that vector is orthogonal to z^n
Ok,The question is "show {z^n,n in Z} is an orthonormal set"
yeah
yes, a set of vectors is ortonormal iff the dot product of z^i and z^j is the kronecker delta of i and j
Yes
Show that will be 0 if n and m are not same
and 1 if n=m
okey. One more thing, the integral has a T under it
it means the integral over that space, right?
does it affect the dot product somehow?
and also... whats the conjugate of z^m?
conjugate is a field homomorphism of complex numbers
so it preserves multiplication (and addition)
okey so it reminds the same?