#linear-algebra
2 messages · Page 195 of 1
ok
done
solved for c1 and c2
now what
ok so now just apply the linearity property
wut ._.
$T(\alpha v_1 + \beta v_2) = \alpha T(v_1) + \beta T(v_2)$
η/rιμ

so i have
-4 = c1(v1) + c2(v2)
8
what do i do?
c1=-7/2 c2=-5/2
v1= 1,3 v2= 3,1
look at what i just wrote
im confused ;-;
$T(c_1 v_1 + c_2 v_2) = c_1 T(v_1) + c_2 T(v_2)$
η/rιμ

What is T(v1)?
1
3
so then just substitute
T is transformation so I think it should be () brackets. So now just apply the linearity property
what i wrote above

now apply this: #linear-algebra message
what are you confused about?
what im supposed to do now?
I just told you what to do, i said in the message "apply this" linking the next step
what is c1
-7/2
actually you sure its -7/2?
I think its supposed to be 7/2, not negative
check again
what is v1

c1 and c2 both cannot be negative, only 1 of them is negative. But besides that
$T(-\frac{7}{2} \begin{pmatrix} 1 \ 3 \end{pmatrix}^T) = -\frac{7}{2} T(\begin{pmatrix} 1 \ 3 \end{pmatrix}^T)$ This is by the second property of linearity
η/rιμ

you know what
just read this

Mathematics LibreTexts
Let (T: \mathbb{R}^n \mapsto \mathbb{R}^m) be a linear transformation. Then there are some important properties of (T) which will be examined in this section.
i don't think you understand what you are doing
if you don't understand now, you are going to have hard time later
so make sure you properly understand what you are doing
Lol, ur not wrong.
My teacher sucks at explaining stuff
ok
It's not really teachers fault at the moment. Hybrid learning is not good for anyone.
Could u help me solve it with 7/2 and ill go back and check that link after?
Due in a little
Sorry ;-;
$T(-\frac{7}{2} \begin{pmatrix} 1 \ 3 \end{pmatrix}) = -\frac{7}{2} T(\begin{pmatrix} 1 \ 3 \end{pmatrix})$
η/rιμ

and you already know what T(1 3) is so just substitute that, then multiply it out
Ok so i did it for both
make sure that either c1 = 7/2, c2 = -5/2, OR c1 = -7/2, c2 = 5/2
now just add your two matrices
thats your final ans
Ty 😭😭
what was your final ans?
11 7
13 6
what was c2?
-5/2
ok maybe its correct then idk, i havent actually solved it
but just check your work again

nice
ty for the help

From
Rule 3
Stick to one channel and don't post the same question in multiple channels. Please don't ask for help in other channels if no one is responding in the one you have posted your question in.
hey quick question
if i have something like A = DB + DC
can i move D to the left side by multiplying by inverse on the left?
all matrices
assuming D is invertible
its a diagonal matrix so sweet
Diagonal matrices can be non invertible tho

Suppose A and B are matrices such that
rank(AB) = rank(A)
show that if $x_1AB = x_2AB$ , then $x_1A=x_2A$
Alireza

I have to show B is invertible but I don't know how... can I have a hint?
rank(AB) ≤ min(rank(A), rank(B))
are you able to get the determinant of an 8x8 matrix from their sub 4x4 matrix determinants
not in general no
Not true
For example A=diag {0,I_n*n}, B_ij=1 if i=j+1 ,0 otherwise .
You can directly prove that N(A)=N(AB) (the former is a linear subspace of the latter, and they have the same dimension )
Can someone explain why MATLAB is giving me apparently spurious complex numbers when producing eigenvalues for the following matrix A =
5 2
-2 1
eig(A)
ans =
3.0000 + 0.0000i
3.0000 - 0.0000i
,w eigenvalues {{5,2},{-2,1}}

aight
@wild pilot ig it just solves det (A - lambda I) over C
and gets 3+i0 and 3-i0 as two roots
It's probably just one of these things that distracts me unnecessarily, but I can even find these eigenvalues in my head - it's just x^2- 6x +9 where x is lambda resulting in eigenvalues of 3, multiplicity of 2 - and I can't work out how the issue of complex numbers is enlivened here at all.
well matlab isn't giving you the wrong answer
maybe it just happens to be when there's a double root it does some method that involves complex numbers or something
I don't think there's anything to worry about, it just has repeated eigenvalues
like when you add 2 and 2 and a computer says 4.000000000001 I guess due to some binary addition magic
adding 2.0 and 2.0 will always give 4 even with floating point arithmetic
0.1 + 0.2 = 0.30000000000000004 though, because of rounding errors since computers use binary scientific notation rather than decimal
Anyone know online calculator that gives ste by step solution on spectral decomposition
i don't think any calculator uses a method you would do by hand
tbh thats not a problem
In numerical linear algebra, a Givens rotation is a rotation in the plane spanned by two coordinates axes. Givens rotations are named after Wallace Givens, who introduced them to numerical analysts in the 1950s while he was working at Argonne National Laboratory.
you would do that several times
yea its just the cartesian product of V with itself n times
no
Tell me the definition of parallel vectors
They have the same direction?
tell me the definition of direction then
The measure of the angle that it makes with a horizontal line
that's far too complicated of a definition for this, and does not work in general vector spaces
two vectors are parallel if they are multiples of each other by a non-zero constant
Ooh okay

I get confused on this
How can the entries of A be a scalar multiple if you're going to be multiplying every entry by a different number?
I think im getting confused on the scalar multiple definition
because I think that scalar multiple means you multiply every entry in the matrix by the same number
well if it's a scalar multiple of (1 0) then it's just gonna be some (k 0)
so when you transform the vector by the matrix you get, what, (a c)?
yes
so what do a and c have to be
i mean just
can't it be any number lol
0
some value k?
so a scalar multiple of a vector is k * (m n) = (km kn)
yes
I understand that logic
but I feel like that just creates more questions than answers lmao
why
like you can just multiply the column vector (1,0) by some number?
yes?
that's what a scalar multiple of it is
a scalar multiple just means you multiply it by some number
right
the number is called a scalar
so then why say [1,0], why not just use k alone
??
like if matrix A is some entries abcd, why do we say it's a scalar multiple of [1,0] when we can multiple that vector by any number, why not just use the number itself as a scalar.
the matrix isn't a multiple of the vector
the vector after being transformed by the matrix is a scalar multiple of the vector
ohh
where the scalar is anything, so i called it k
ok
thank you
np

just making sure if i am on the right track
here i should find a basis for f and g first
then i find a basis for [result] and h
s that correct?
since {f,g,h} is a basis of $\mathbb{R}[t]_{\leq 2}$, the set you get after gram schmidt will be a basis and be orthonormal
moshill1

so just go through orthonormalization and you're done

From Treil’s LADW page 17.
What are the dimensions of this matrix T?
I know that it is n+1 entries wide. But I can’t figure out how tall it is.

My guess is that this is a square matrix.... meaning it is also n+1 entire tall.
n+1 "entries tall", for the same reason it is n+1 "entries wide"
(My justification is that the vector f’(t) is n+1 entries tall.)
youre counting 0, 1, 2, ... n as you go down a row or column
there are n+1 such elements
Okay. So it is square. Tyty
What do you call a vector with non zero entries directly below the main diagonal?
"not upper triangular"
lol
dont think theres a special term
Okay
you can use a phrase like
"the n-by-n submatrix in the bottom-left corner is diagonal"
i guess
or "the n-by-n submatrix given by removing the top row and rightmost column is diagonal"
but i dont think theres a snappy word for it
Lol. I can totally visualize that too. Imma use that phrasing. Tyty
these matrices come up in DEs but i havent heard a name before
Okay. I can tell by the function definitions that T is not surjective.... but the matrix makes this obvious too....cuz it’s not “full rank.” I think that’s the right terminology.
i have a question about cholensky decomposition

I'm confused by the statement B here
so does it mean that A is positive definite if the matrix L with positive diagonal entries is unique?
or each diagonal entry of L is unique?
so if I had L equal to this would A be positive definite?

Hey guys, Im new here. I have a question. Showing that the finite set of (Zn, Xn) is a group iff n is prime. Does it suffice to state that ' bc 0 isnt an element and u can get numbers in the set multiplying to reach 0, closure of group is not maintained thus it must be a prime'

No, (Zn, *n) is never a group. They are talking about Zn* not Zn.
Do you know what Zn* means, @wintry steppe
Yes. I do
What does it mean?
the set (1 2 3... n-1)
under mod n multiplication
no
Oh ok
Zn* is the group of units of Zn
Carla_

I see.
Thanks a lot @wintry steppe
Thanks for asking questions, i'm really bored and noone asking questions
So I hope it;'s cool if I ask further then 🙂
it is
So when we say Q*, we mean all the rationals which make a group under multn. Is that the same as saying, 'Q * is the group of units of rationals'
You know what a ring is?
A group with extra operation
New to this
maybe nvm then, and no thats not right, it is a group and has an extra operation but thats not enough
when we say Q* we mean all the invertible rationals (for multiplication)
when we say Z* we mean all the invertible integers...
etc
I seee
turns out that if R is a ring, then R* will always be a group
this because in rings, the second operation is associative and has identity. if we restrict to only the invertible ones, you hopefully can see that this is definition of a group
This makes sense to me bc it removes the addition identity 0
im thinking cartesian atm tho. not generically
the identity of the group of units will be the multiplication identity 1
0 can't be there cuz cuz of distributivity it is not invertible except in the zero ring but otherwise no lol
yup 🙂 ty ty
now last question for now
why should n be a prime in (Zn*,Xn) for it to become a group?
Is it due to the lack of closure ofthe group bc zero is there if two numbers multiply
well if it isn't prime, there will be numbers that multiply to 0 so it can't be group
Okay
but it's stronger than that: there will always be an inverse of every non-zero element if it's prime
so you have to prove that
yeaa, im trying to but it's doing my head in
yea iirc it's a bit tricky to prove it
so far i said. well if its not prime then u get 2 numbers multiplying to get it. so it has to br prime xD
but ur right
i feel like it's stronger than that
thanks carla. ur god sent
@wintry steppe this is where I learnt my definition from btw. Are they equivalent to yours or is there a difference i'm missing on?
What are the invertible for multiplication elements of Q?
I see. Sorry
lol why sorry
yo guys what is matrix (A^2)^-1, is it A again? 😅
No
without any other context, identity ftw

have you heard of diagonalization?
tell me what you know about it
matrix is diagnalizeable if there is a match that satisifes that above equation
P^-1AP
I think idk
no
a matrix A is diagonalizable iff there is a matrix P and a diagonal matrix D such tha P^-1AP = D
thats what you want to show
have you heard of eigenv* where * is either ectors or alues?
I suppose you can just set up some linear equations after multiplying both sides by P on the left side.

it looks like some martian language to me, idk how you figured they were inequalities
When you diagonalize a matrix PDP^-1, if P is unitary, does it matter which side the inverse is on?
Cause my chicken scratch is only slightly better 
no Cuck,its okay, inverses of unitaries are still unitary
Ty!
but um you cant just swap them around
so be careful, it matters what you put in each side, not what you call it
Wait wait
So if P is unitary then P^-1DP=/=PDP^-1?
yeah
matrice multiplication isn't commutative
even just in the space of inversible matrices
Jup that matrix space that is isomorphic to C for example
Okay I am asking because in one of my homeworks my professor wrote find D=PAP^-1 where P is unitary but I was like the P^-1 should be in the front
well
if you find D = PAP^-1
then with P' = P^-1
you have D = P'^-1AP'
The order doesn't matter, if you find P s.t D = PAP^-1 and you're looking for P' s.t D = P^-1AP, then you've won since D = P^-1A(P^-1)^-1, so P' = P^-1 is the matrix you're looking for
(but P won't be equal to P', so the order does matter in that sense)
not sure if that's clear

The P' part is confusing me because I think hes just looking for P
Ok lemme rephrase it
I can also send the question if perhaps my own wording is unclear
Looking for P s.t D = PAP^-1 or looking for P' s.t D = P'^-1AP' is the "same thing"
since P^-1 = P' (or equivalently P'^-1 = P)
But then you just get back to D=PAP^-1

PAP^-1 and P'^-1AP'
Looking for M s.t D = MAM^-1 or looking for M' s.t D = M'^-1AM' is the "same thing"
my "P" wasn't the "P" of your question
i'm saying that if you find either M or M', you got the P of your question
if you have M'
well then just let P be M'
and if you've found M
then let P be M^-1
is this clearer ? 
Yeah I would need to take the inverse of M' to just find M
yeah, that's what I was trying to say (sorry i'm not really fluent in english, my wording probably confused you )
Yeah I understand. But I dont think thats what my professor intended
because them M' would be the matrix of the eigenvectors put together but inverted
Any then I asked my friend and he told me that MAM^-1 is equal to M^1AM no inverse (') because M is unitary
So in regards to what my friend is saying, that would be incorrect
I was just trying to say that it doesn't depend on whether you look for M or for M' in the process of solving the exercise, since in the end you get the P you're looking up to one last step of inversion
Right Right. I just want to know if my friend is correct in his statement
No primes/inversions
That you can swap them
because he said MAM^1=M^-1AM which I dont think is correct because you arent inverting the M. So like no M' and M'^-1. Just the same M


Okay okay thank you thank you. Just because M is unitary would change that correct?
I don't understand your question 
Sorry wouldnt*
I mean to ask if M is unitary, that would not change anything correct
Oh
So like if M is unitary, is this still false that D = M^-1AM implies D = MAM^-1, is what you are asking ?
yes that is what I am asking
Then yeah, that's still false
Okay thank you just making triple sure
Hey, could someone check my work for this homework problem I miss

Teacher doesn't explain very well, but if you guys figure out what I got wrong, I'd appreciate it.
Yo
Question
how do u use the degree symbol on keyboard
may i ask why the nullspace of a linear mapping =0 ,then the linear mapping is one-to-one
Because if the mapping is not one-one that implies,null space is non trivial
T(a)=T(b) implies T(a-b)=0
basis vectors are linearly independent, so im assuming since you wrote that they were dependent, you must have forgotten to write "not" a basis
F
indeed
Is it iff?
yes that's an equivalence
T(a) = T(b) <=> T(a) - T(b) = 0 <=> T(a-b) = 0
(the last equivalence comes from the fact that T is linear, more specifically comes from T(a+b) = T(a) + T(b))
Ok thanks
If $A\in M_n(\mathbb C)$ and $(Ax,x)=0 \ \forall x \in \mathbb C ^n$, does it follow that $A=0 $?
bert

How do I see this?
For M_n(R) I can see that it is skew symmetric. The trick is to look at (A(x+y),x+y)
Hello. If the intersection of the kernel and the image of an operator is zero, then why is the finite-dimensional vector space the direct sum of the kernel and the image?
Are you sure of that?
If this is not correct, please give a counterexample.
0 0
1 0
or do you mean to ask that in the case their intersection is zero that its a direct sum?
If f^2 = f then the space is a direct sum of the kernel and image of f
yes, i didnt know there was a different interpretation lol
pretty sure the question was trivial intersection implies direct sum
Yes, but I cannot understand your first interpretation of my question.
Wait umm I think I’m missing a condition on my statement
I think my question has only one interpretation.
yea
well anyway, you can just throw rank nullity at it and you get your answer
choose a basis for the kernel and a basis for the image. then combining them will give you a set of linearly independent vectors
and they will add up to the dimension of your space
How can we show that such a union spans the whole space?
like, the only thing you have to convince yourself of is that their direct sum is the entire space but that just follows from rank nullity
its just by dimension
dim V = dim (ker T) + dim (im T)
the direct sum will be a subspace of V with the same dimension as V
so it is V
And since their intersection is zero, they must be independent.
yea
Ok. Thanks. Can you give a counterexample for infinite-dimensional case?
the trivial intersection tells you already that their sum is a direct sum and their dimensions add up, and then rank nullity tells you that that the dimension of the direct sum is the same as that of the entire space
thats just all you need
the only thing that can "break" is rank-nullity in the infinite dimensional case
you cant use that argument like that anymore
Ok. But, is there any counterexample?
probably but i would have to think about it lol
There might not be. You’ll still have an equality between the cardinality of their dimensions, and that’s all you need
Explain?
Rank-nullity is not true for infinite-dimensional case?
when a + b = max{a,b} then you cant count in the same way as with naturals
rank nullity is still true
you just dont add up infinities like naturals
So, why can we not use your already-mentioned argument for a proof for infinite-dimensional case?
you can still follow the proof of the rank nullity theorem
im not saying we should add up infinities like naturals...
you just cant use a counting argument
What counting argument?
that you span the entire space because the dimensions add up
this particular argument doesnt work
but you can try to follow the proof of the rank nullity theorem for arbitrary vector spaces
Why?
because cardinal arithmetic
that's exactly what im suggesting?
i wasnt saying anything against that, only against the counting argument
okay, but by dim V = dim ker T + dim im T, i clearly mean there is a bijection between a basis for V and the disjoint union of the bases for ker T and im T
nevermind, im being dumb, this (rank nullity for infinite dimensions) is not enough
The only thing you can conclude is that the cardinality of the dimension of ker T oplus im T is the same as V, not that they are equal
Also, sorry I said “I clearly mean there is a bijection...” above.
I really wasn’t being clear about what I was talking about.
i think i might have a candidate for a counter example
from a sequence space
so if i write (a_n) for a sequence and define a map T(a_n) = (0, a_n)
i think that should be linear
it just prepends 0 to the sequence
T is not surjective
but injective
so ker T = {0}
but since its not surjective, ker T + im T != V
@broken sun happy now? :)
Thanks.

you can get a counter example every time a linear map is injective but not surjective
that's something that can only happen in the infinite dimensional case
Yes.
(all in the context of endomorphisms)
my question got buried
Oh this is clear to me now. we do get (Ax,y)=0
wait why ?
If forall x € R^n, Ax = 0 then in particular Ax is zero on the canonical basis of R^n, so it must be the zero matrix, no ?

I think someone found an explicit counter example
where ? 


does functions not come under algebra?
ok ill post there mb
Can someone help me understand inner product spaces
whats ur question abt them
are you comfortable with what a vector space is?
can u send the definition you have
- positivity
- symetricity
- additivity
- homogeneity
and then i have the definitions of those 4 htings
yes so that is the definition of an inner product. and to boil it all down intuitively, it’s a function which gives a notion of “length” in a vector space. thus a vector space which has a notion of length in it (i.e. has an inner product defined over it) is called an inner product space
and the special function defining “length” must satisfy those properties in that definition in order for it to be an inner product
it totally depends on which vector space we are dealing with...
ok i can give an example
did you mean to say can i get an example?
Just out of curiosity, is multiplying by the determinant of a 3d transformation a valid way to compute a rotational solid along a non vertical or horizontal line?

yea exactly
how were these quantities calculated?

how would I start this?
positivity: (u,u) > 0, for u != 0, and (u,u) = 0 iff u = 0 ```i have this
and im a little confused about the notation for the brackets
is that just two vectors
shoudlnt it be the dot product instead?
the dot product is a specific example of an inner product.
oh
notice that in that little excerpt they didn’t mention which specific vector space we are talking about
it just says any inner product will satisfy that
ok so for this question, lets say I have three vectors. u, v and w.
then i can assume u is not the zero vector
which means (u,u) > 0
is that correct so far?
are you stating that u is not the zero vector?
yes
ok then yea
and do i also have to satisfy (u,u) = 0, iff u = 0?
thats what the definition says, yes.
these are two separate statements

Ok right, so how do I satisfy both of those with the same vector?
you dont
u don’t
the point is that its showing both cases
either u is equal to 0 or it isnt
if its equal to 0, then (u, u) = 0
if its not equal to 0, then (u, u) > 0
ok so lets say we had vectors with actual values
and this holds with "u" representing ANY vector
u = (0,0,0) in R^3
perhaps this rephrasing would make more sense to you:
for all vectors u, (u, u) ≥ 0; and (u, u) = 0 iff u = 0
u can also think of it in terms of “length” if that’s more intuitive, that statement would then be saying if a vector has zero length then it’s the zero vector and vise versa
ok so It only has to satisfy one of them
for positivity
well,
ok so what would be someting that doesnt satisfy it?
define (u, v) = 1 for all vectors u, v
then (0, 0) = 1 which contradicts (0, 0) = 0
in fact, if you come up with a totally random relation, it probably doesnt satisfy it
define (u, v) = x - y where x is the first entry of u and y is the first entry of v
this does satisfy (0, 0) = 0, but not (u, u) > 0 for u ≠ 0
indeed, (u, u) = 0 for all vectors u
(not just 0)
its more confusing now
what dont you understand about those non-examples?
remember that we’re just talking abt functions which take in pairs of vectors and spit out numbers. he’s just giving examples of such functions which don’t satisfy certain properties
the inner product is a function, yes
oh ok
a function that takes as input two vectors and outputs a real number
only two vectors?
we often write inner products as (u, v) or u · v or similar
but really theyre functions
in the same way that, say, addition is a function
which takes as input two things and outputs their sum
can you give me a super easy example again
well, the most common example of an inner product is the dot product

in the above case, the inputs of the function are a and b
and the output is the sum of the products of their coordinates
ok and this satisfies the 4 properties?
yes.
u · u = u_1 * u_1 + u_2 * u_2 + ... + u_n * u_n, right?
yes
where each u_i is some entry in u
are you familiar with the fact that the square of a real number is always nonnegative?
yes I am
there you go.
every term of the sum is a square
so every term is ≥ 0
if you add together a bunch of things that are ≥ 0, the sum is as well.
ok that makes sense
now for symmetricity
this would mean
u_1 * v_1 = v_1 * u_1
which is true
yup
Additivity:
(u+v,w) = (u,w) + (v,w) for all u,v,w in V.```so
this one confuses me
i know its a property ive done many times before
but idk how to write it out
just plug in u+v and w into the dot product formula
i’m not trying to rush you but just lmk when ur done cause i got a question to ask too
sweet thx np
i’m reading numerical linear algebra by trefethen and bau and currently learning abt algorithms for least squares problems. One of these algorithms is to use a modified gram schmidt procedure on the augmented matrix. this does not make sense to me.

specifically where it says that Q*b = R(1:n, n+1)
i can’t seem to prove why this would be true
if anyone needs any more of the page/any other part of the book i can send it
I dont really understand what the rank and nullity of a matrix is.
How do I determine it for a matrix like
1 2 1
-1 0 3
1 5 7
please @ me when replying, thx
two similar matrices have the exact same eigenvalue??
yea they do
ok and
im trying to find a basis for a eigenspace
i ended up with the zero vector
but I want to be sure
3 1 0
1 3 2
0 1 3```lambda = 3
is there a way for someone to confirm so I know if i did it right
first off all the zero vector can’t be part of a basis
ohh
but how did you get three for an eigenvalue
oh ok
i did
3I - A```i being identity matrix, A being my matrix
then I just solved the system
honestly i’m kinda rusty on this haha so i might not be the best for this
what system did you solve?
oh no worries
0 -1 0 | x1
-1 0 -2 | x2 = 0
0 -1 0 | x3```those are two matrices
not one augmented
and 0 meaning zero vector
oh i see
what’s the point of solving that system cause didn’t you say you were already given an eigenvector in that corresponding eigenspace?
ohh
i honestly don’t think i ever learned how to do that but now i’m curious and giving it a try
ok so this might be wrong but
nevermind i’m dumb
what’s the vector given as an eigenvector
there is none
you said that they gave you one though

dude ngl the wording of that problem confuses me so much... good luck
left multiplying the vector by the matrix should be the same as scaling the vector by 3
(defintion of being an eigenvector with eigenvalue)
$Av=\lambda v$
moshill1


what's the question?
compute <f,g>?
if so what are they defining as the IP
I just have to solve this
Ok but there's nothing to solve in your screenshot
\left(2,\:2,\:1\right) 2t^5/2 dt
oh
f 2t^(5/2)dt
the f is some symbol
from calculus
???
ive never used it
can you show me how they defined the inner product?

the integral sign?
ya
ive never used it before
but basically i need to solve that f thing withf 2t^(5/2)dt
Ok.. so you havent taken a calc course at your uni?
integral is the reverse of differentiation is the tl;dr
$\dv{x}\int_a^x f(t)\dd{t}=f(x)$
moshill1

$\int_a^b f(x)\dd{x}=F(b)-F(a), F'=f$
moshill1

ok so
lets say I had a the inner product space V of continuous function [0,1]
where
u=2t, v=-t^2
how can I find lets say
d(u,v)
what's d(u,v)?
metric. d(u,v)=||u-v||
but the norm above is defined by the inner product, which itself is defined by an integral, so this is more computation that you've not learned enough material to do
again, you need to know how to compute an integral in order to compute the above
but to lay out the dependencies so you at least know the route of computation
the 'usual' inner product on $V$ is defined by
$$\ip{f}{g}=\int_0^1fg$$
which naturally defines a norm ('length' function) by
$$\norm{f}=\sqrt{\ip f}$$
which in turn naturally defines a metric ('distance' function) by
$$d(f,g)=\norm{f-g}$$
RokettoJanpu

Can somebody help me with this
i sent this here before

people told me I was correct
so I asked my teacher for a regrade, but she said she doesnt agree with me
a) should also be a basis
did you ask why it's not a basis?
no, she just said she doesnt agree and I should check the solution
but it follows the definition of a basis
Ok so ask her why it isnt a basis
ok i will
cause it is, d is just the more obvious basis
[a,b,a] = b[0,1,0]+a[1,0,1]
[a,b,a]=b[1,1,1]+(a-b)[1,0,1] if I did it right

ok ill ask her to prove me wrong then lol
She asked me to solve it on paper and send it to her
@nocturne jewel is the thing your wrote above it?
what?
[a,b,a]=b[1,1,1]+(a-b)[1,0,1]
Yeah, though check it for yourself, and you'd need to show the basis vectors are lin indep
any chanc eyou can help me with that, i really dont remember anything now that im done with math
if not i understand
follow the teacher's process
show that 0=a[1,0,1]+b[1,1,1] is only true when a=b=0
wouldnt it be sufficient to show that the set of vectorts are linearly dependent
and span R^3
oh wait, does it span?
whats W?
oh i thought u had to show the set of vectors span R^3
for the basis
i alreeady wrote down the vectors being independent
d doesnt span R3 either
oh ok
so how would I go about doing this then
doing what?
"this"
a) being a basis

,rotate

idk how to check that
Take an arbitrary vector in W, [a,b,a] a,b in R
the only way you can get the 2nd entry to be b is make the scalar of [1,1,1, b
so [a,b,a]=X[1,0,1]+b[1,1,1]
for unknown X
a=X+b -> X=a-b
so $[a,b,a]=(a-b)[1,0,1]+b[1,1,1]$
moshill1

since a and b are real, a-b is real so it's a valid scalar
tbh i dont understand what you did, but if i write that down would that be sufficient ?
intuitively those vectors point in different directions, so they're independent
one is not a scaled version of the other, so they span a plane
how can i show the span part
what he did is the way you solve it in the general case, he showed the only solution to Ax = 0 is x = 0
these are the vectors ([1,1,1], [1,0,1]) you had

ya
to be dependent one must be a combination of the other
but they're on different lines, so that can't be
watch the first few videos of https://www.3blue1brown.com/essence-of-linear-algebra-page/
3Blue1Brown
Essence of linear algebra. Vectors, span, linear dependence, linear transformations, determinants, column space, change of basis, eigenvectors and eigenvalues, etc.
the first 4
saying "one is a combination of the others" is the same as saying Ax = 0 has a solution for x not being zero
I get the independence part
i dont get how to write down and show my teacher it spans
im not sure
here

I literally just need to prove im right
and i get 85% instead of 71%
and this is my only math class i have to take, so I just need help with this one last thing and thats it
oh thats a confusion question, what they mean is do those two vectors span [a,b,a]
so its a plane in R3
just write [a,b,a] as a linear combination of your two vectors [1,0,1] and [1,1,1]
that proves it spans it?
yeah
1 sec

you just notice

then you multiply by the right guys to get a,b
they wrote it in a kinda confusing way, i'd have just said [a,b,a]

ok
so
i honestly have no idea what you did above
but its correct
then its correct
wdym
you know linear combinations?
its where you multiply constants times vectors and add vectors
ok yes
this shows a way to combine your vectors to get [a,b,a]
so our vectors must span all [a,b,a]
since I just showed how you can get it as a combination

i hope she will give me the mark
hey guys, if A and B are conjugate square matrices, do they have the same eigenvectors + eigenvalues?
found out its same eigenvalues but not vectors
Suppose $T: V \to V$ is a linear transformation on some 2-dimensional real vector space V with eigenvalues 2 and 3. Then the limit $\lim_{n\to\infty} |trace(T^n)|^{1/n} equals?$
Delta Syndrome

we know $T^nx = \lambda^n x$ so we know each eigenvalue is raised to the nth power, and $\text{Trace}(T) = \lambda_1 + \lambda_2$
so $$\lim_{n\to \infty} \left((\lambda_1 + \lambda_2)^n\right)^{1/n} = \lambda_1 + \lambda_2$$
uli

does that work @smoky patio ?
oooh
why is trace T = lambda 1 + lambda 2?
shouldn't it be all the diagonals?
wait
omg
sorry
wait so the answer is 5?
I think
wait I think n going to infinity is a bit weird
they just cancel out, no?
somethings weird
can you take n out like that?
sry I don't mean to be doubtful of you
just trying to understand
please be doubtful of me
:'))
oh yeah you're right
$\text{Trace}(T^n) = \lambda_1^n + \lambda_2^n$
not the other way
uli

oh so infty?
how do you figure infty?
wow this is cal1 stuff why am i struggling
isn't $\lambda_1^n + \lambda_2^n < (\lambda_1 + \lambda_2)^n$
is it infty or 0 lool
uli

i'm tired too lmao
$$\lim_{n \to \infty} (2^n + 3^n)^{1/n}$$
uli


euler is rolling over in his grave
AHAHA
now uh we should prolly show it analytically
is there a smart way to find limits like this i've forgotten
oh yeah can't you like put the limit inside the thingy sometimes
yeah I'm trying to remember how
no but the inside isn't defined at infty hm
oh
$$\lim_{x \to \infty} \left(2^{1/x} + 3^{1/x}\right)^x$$
looks kinda like the limit definition for e
but i'm not sure
uli

oh wait
now i think you can do the limit of the inside, since its defined at infinity?
my reasoning is just that this term will be dominated by the higher one as n grows more and more
but that doesnt add anything for us
its super obvious i bet
yeah you can put the limit inside i think
just remembering the details now cough cough watching a khan academy video
I think you only would be able to if there was no x outside the brackets but there is right?
or
LOOL
nice
its like $$\lim_{x \to a} f(g(x)) = f(\lim_{x \to a} g(x))$$ if f is defined there
uli

true yeah I'm braindead
i'm just tired trying to remember what f and g are
found it on math exchange if ur interested

Mathematics Stack Exchange
Just checking.
$2^n$ ($n \to \infty$) tends to $\infty$.
+
$3^n$ also ($n \to \infty$) tends to $\infty$
so the sum gets me $\infty$.
Now $(\infty)^{1/\infty}$ : $(\infty)^0 = 1$
I see no other ...
oh sandwich works cool
here's how symbollab does it https://www.symbolab.com/solver/step-by-step/\lim_{x\to\infty}\left(2^{x}%2B3^{x}\right)^{\frac{1}{x}}
Free Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step
the put exp(log()) around it then do the "limit chain rule" which is what i was trying to do earlier
oh and this is a good explaination https://math.stackexchange.com/a/503053
Mathematics Stack Exchange
I have to evaluate the limit of this function,
$$\lim_{x\to0^+} \arctan(\ln x)$$
I already know the answer, it's $-\dfrac{π}{2}$, but the only part I don't get it, how does it come to that? I di...
it's sort of misleading to call it a "limit chain rule"; it's a property of continuous functions. A comment under that mathSE answer gives an example for a discontinuous function for which it fails
(why is this not in #calculus anyway)
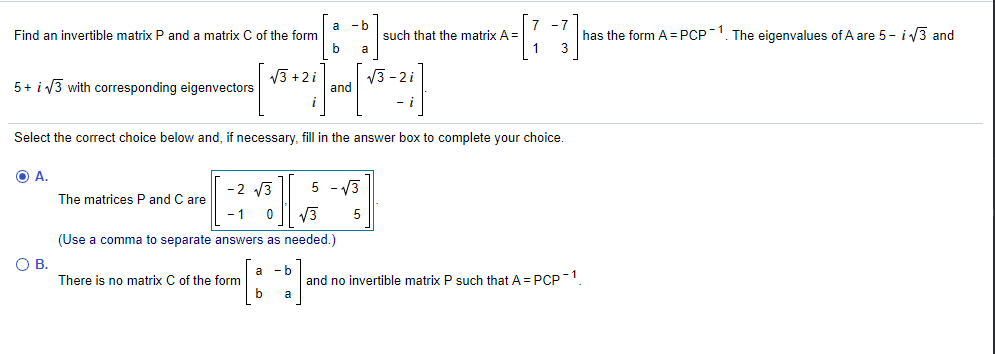
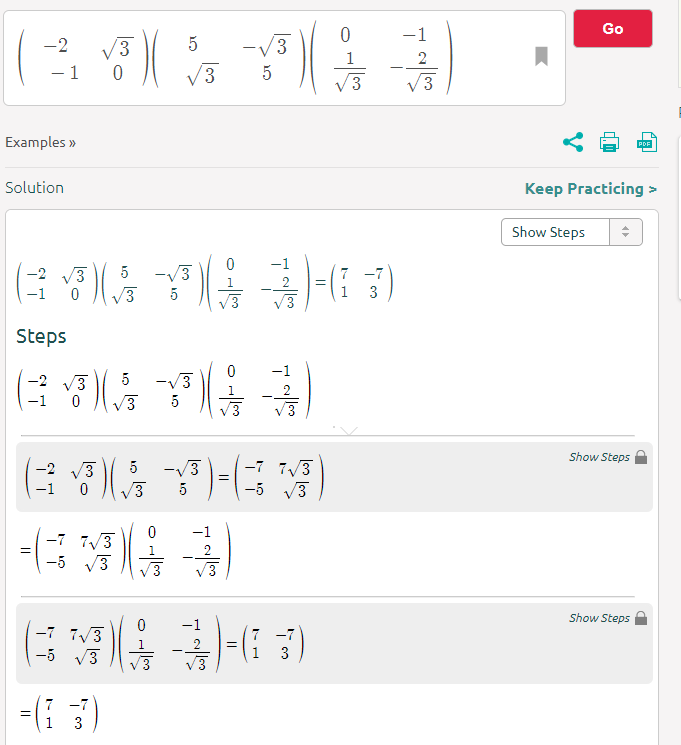
you should be able to check A=PCP^-1 yourself
How do I get exponent inside matrix?
I have {{1,2},{2,4}}^n
And I know

But I dont know how to do that
that matrix should be pretty simple to diagonalize
you could diagonalize it and exponentiate the diagonal matrix of eigenvalues
yes
I'll try that, tought there was some "cheat" to do it, like for limits there le hospital rule
i mean, it's a rank 1 matrix. you can directly write it as an outer product and the nonzero eigenvalue is the 2-norm squared of the vector
so all you have to do is find the vector that has this outer product and exponentiate its norm
i think?
I'm not sure what is 2-norm
the length of the vector
But I'll see that spectral decomposition
Should not be problem for that smal matrix

Am I just being asked to find the eigenvalues, then form a basis that spans the eigenvectors?
pretty much, well your eigenvectors can be used as your basis
Thank you.
is anyone else reading Linear Alg. by friedberg insel and spence?
can someone explain why that $T|_{\mathbb{C}v^\perp}$ is normal

Its probebaly very obvious and i just skim reading
and i cant understand suddenly 😢
Anticipation

$T|{\mathbb{C}v^\perp} T^|{\mathbb{C}v^\perp}=T^|{\mathbb{C}v^\perp}T|{\mathbb{C}v^\perp} \newline
T^|{\mathbb{C}v^\perp}= T|{\mathbb{C}v^\perp}^$ which implies the result
$T|{\mathbb{C}v^\perp} T^\star|{\mathbb{C}v^\perp}=T^\star|{\mathbb{C}v^\perp}T|{\mathbb{C}v^\perp}$
Anticipation

$(T|{\mathbb{C}v^\perp}) (T^|{\mathbb{C}v^\perp})=(T^|{\mathbb{C}v^\perp})(T|{\mathbb{C}v^\perp}) \newline
T^|{\mathbb{C}v^\perp}= (T|{\mathbb{C}v^\perp})^$ which implies the result
why would first line be true?
Buncho Drunk

So I need to find the Col A and turn it into an Orthongonal basis. A = {[1,1,1,], [0,1,2]}, B = {[6,0,0]} I found that b is not in the Col A how would I turn A into an Orthongonal basis

I guess I can't get my head wrapped around it
Is there any difference between $|\vec{v}|$ and $||\vec{v}||$? Both are the length of a vector right?
Exynouz

Or does the double absolute value mean norm of a normalised vector?
|v| is not a thing


you also find it in physics books
Ok, It's the same thing,then
it's just a notation thing
double bars is more common, but you usually see single bars the first time they show it
there is no mistaking it when you can put stuff in bold, but it's pretty helpful when writing stuff by hand to use double bars for clarity
I see
Where can I ask my question about LaTeX?
I am getting a nonsensical error message
someone on the math pedagogy channel was sharing invites to a latex server. you could also try your luck in the discussion general and chill channels
Ok nvm, I found a LaTeX discord server, thanks though :)
aight

{kind=link}
{kind=link}
{kind=link}
{kind=link}
everything
Like I subbed in J = N + D and then N = J-D