#linear-algebra
2 messages · Page 167 of 1
slimvesus
slimvesus
slimvesus
ok
slimvesus
wdym
What does it mean, geometrically?
idk havnt seen anything
uses an orthogonal decomposition in the proof if that means anything idk
For example if n=1 and |u|^2 + |v|^2 = 1 then the tighter estimate you proved sqrt(1-|u|^2) * sqrt(1-|v|^2) \leq 1 - |u||v| implies that the largest area of a rectangle inscribed in the first quadrant of the unit circle has area 1/2
@wintry steppe
you replaced 1- <u,v> with 1-|u||v|
a^2 <= b^2 ?
how you replaced the RHS
because
$1 - |u||v|$ is less than $1 - \langle u,v \rangle$
Yes
but $(1 - |u|^2)(1-|v|^2) \leq (1- \langle u,v \rangle )^2$
Yes
how are you sure that 1 - |u|v| is larger or equal to the LHS
ugh this is tough
Let me re explain myself
It may help you to rewrite the into a single chain of inequalities
rewrite the entire proof*
we want to prove this
but
you said that it is enough to show $(1 - |u|^2)(1-|v|^2) \leq (1- |u||v|)^2$
Yes
Yes
You are replacing the RHS with somethign that could be less than what was already there, so the new inequality could be not true?
ok
oh ok
otherwise it makes sense to me
ok
ty
{A,B, C } over modulo 2
Is not a subspace
But any example or proof to show how?
Where {A,B, C} are subsets of a set
Hello, is that statement is correct?
det(AB)=det(A)det(B)=det(B)det(A)
Indeed.
this means that det(AB) = det(BA)
even though AB might not equal BA
this is a very handy fact
That what i thought because det(A) or det(B) is just a scalar so it is commutative
Thank you all
To prove c=8 $\implies$ linearly dependent, would it be correct to just show that the vector with c can be written as a linear combination of the other two vectors, or would I have to use the formal definition?
beeswax
that suffices because:
if $\lambda_1 v_1 + \lambda_2 v_2 = \mu v_3$, then we can rearrange this to [\lambda_1 v_1 + \lambda_2 v_2 - \mu v_3 = \mathbf{0}]
Namington
and setting lambda_3 = -mu gives the definition of linear dependence
so yes, that works.
(although you may want to quickly justify it)
Just if -mu is not zero
well if mu is 0 then v_1, v_2 are linearly dependent anyway
since we've shown that lambda_1 v_1 + lambda_2 v_2 = 0
but in this case, the first two vectors are not linearly dependent
so thats not a concern
Oh, I see. So I can start off with writing the vector with c as a linear combination of the first two, then manipulate it to look like the definition of lin. dep.?
How do you know that lambda_1 and lambda_2 is not zero as well?
by assumption that v_3 is a linear combination of them
and the fact that v_3 is nonzero
@wintry turret correct
and that "'manipulation" is just subtracting it from both sides
Wait, why is it valid to assume that the 3rd vector is a linear combination of the first two? Would I first just have to show the computation to figure out what the scalars are?
well yeah you cant assume that the third vector is a lin comb
you have to show it
for c = 8
my "by assumption" line was just answering bardak's question
Gotcha
what does P ⊆ R mean?
I'm kinda confused:
the practice exercise is giving me 2 vectors (a and b) and a line l=a+b*t | t belongs to R
and it's asking me to find all points in R³ in which the distance to the line is 1
so basically it's asking me to find all points that meet the criteria that there are?
doesn't the line extend forever?
the line does extend forever
visually youll be creating an "infinitely long cylinder" around the line
that much I got
but it's asking me to "find all points"
I assume it's not asking me to right down an infinite series of numbers
at least not in the way that I thought
i'd assume it just wants you to use set builder notation
write out every point, might take you a bit
how would I go about accomplishing such a task?
well, it's the set of all points p where ||(a+b*t) - p|| = 1
for some real number t
im not sure if this is the format theyre looking for
maybe try looking at examples from class/textbooks to see if they have any similar problems?
but it does describe all points
already did, no help
In retrospect, it very likely does
i mean thats what im saying
do you know how to write
"the set of all points p in ℝ³ such that ||(a+b)*t - p|| = 1 for some real number t" in set builder notation
I'm not even sure I know what set builder notation is really
I know how to use some symbols
yeah, that particular fashion is how most of the exercises are laid out
which is why I know
yes, and that's an example of set builder notation
but to say I understand the underlying rules would be quite a stretch
(of this notation)
{things take this form | but they have to satisfy these rules}
oh that's cool
so the exercize is just asking me to write it out?
i think? im not sure
i dont know what else they'd be looking for
unless you want to describe the shape more... geoemtrically?
nah, I doubt that's it
"the cylinder with radius 1 along the line..."
i mean maybe they want you to expand ||(a+b)*t - p|| using the definition of magnitude/norm
into sqrt(entry1^2 + entry2^2 + ... + entryn^2) or whatever

The weird thing
is that they go through the trouble of giving me numbers
for the vectors
a and b
this is the first time that they give me numbers that aren't relevant
Could someone please help me with this question. I was able to row reduce with no issue but I'm having trouble with the questions. Would it be 4 equations and 4 unknowns since it's a 4x4 matrix? And the part I'm completely stuck on is knowing how to tell if there is a non-trivial solution. And for the last part I got t*[-1,-3,1,0]
Would it be 4 equations and 4 unknowns since it's a 4x4 matrix?
yes; each row corresponds to an equation, each column to an unknown
And the part I'm completely stuck on is knowing how to tell if there is a non-trivial solution
does the row echelon form of the matrix have a 0 row? what does that tell you about nontrivial solutions?
And for the last part I got t*[-1,-3,1,0]
seems like you do think it has a nontrivial solution.
(i think "what you got" is correct btw)
(but i just did the row reduction in my head, mightve made a mistake)
Thanks so much for the response. Does non trivial mean there is a Bx = 0 where x isn't 0?
great. Thanks so much
homogenous systems Bx = 0 will ALWAYS have the solution where x is the zero vector
so we use the term "nontrivial" to refer to the other solutions
(which don't always exist - in fact, they exist precisely when the Row Echelon form of B has a zero row)
thanks so much. Just to double check my understanding, the zero row is needed so that we can get a free variable that will provide other solutions (non trivial) and the zero vector solution?
if you dont have a zero row, then the RREF form of B is just the identity matrix, so Bx = 0 will have the same solutions as x = 0; that is to say, it will ONLY have the zero vector as a solution
the other direction is a bit harder to prove but, as you suggested, comes from the fact that it'll have a free variable
that's awesome. linear algebra yields a lot of cool stuff
if i wanted to see if there was an inconsistant vector b, is the best way to create an augmented matrix with the solutions being b1,b2,b3,b4, then row reducing it to see if i get a 0= some equation of b_n(s) that isn't true?
hi, not sure if this is the correct place to ask, but, in the k-means clustering algorithm, the maximization process readjusts the the centroid of the cluster by taking the average of assigned data points. But how do you take the average of coordinates (i.e [2,3], [5,3]) to get a new centroid?
Is it average of X's and average of Y's?
How to prove that if $m>n$ for some $A\in M_{m\times n}$ so there is $b\in \mathbb{F}^m$ s.t for Ax=b there is no solution?
Bardak
yeah.
Use the rank argument. Find the rank of A, this is if it's allowed tho.
@tropic turret hint: dim V = dim null T + dim range T
and to each matrix there is associated linear map
i mean consider dimension of codomain
and maximal dimension of range T
Ok cool
How do I find the inverse of a linear transformation?
What are the general steps?
@tropic turret Can you find a matrix representing your linear transformation with some basis?
double checking something: Let's say I have a vector space V with dim(V) = 5, if I have a set of 6 vectors in V, are the vectors automatically dependent?
since $|{v_0,v_1,...,v_5}| > dim{V}$
Yes,The set is linearly dependent
moshill1
ok thanks
and the reason is that the set can never be a basis by equicardinality property?
Yes(Assuming you mean All basis of a space have the same number of elements)
Q: If I want to find the base of KerT and its dimension do I just pluck the equations to be equal 0? 3x - 2y = 0 etc
If I want to find base and dim of ImT do I need to put them into a matrix like (3 -2 0) as the first row in that matrix and eliminated?
https://i.imgur.com/V4d713l.png
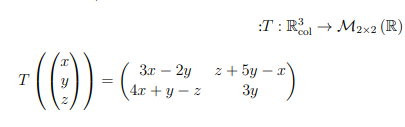
also, what does it being from R^3 to Matrix tell me if anything?
help me
I tried multiplying it out and subtracting to get the matrix = 0 but I didn't get the identity matrix as a solution
so I assume I did something wrong
Well first you explicitly write out what the product of the matrices are, then the left hand side and the right hand should should both be some 2x2 matrices where each entry is some expression involving A,B,C,D,x1,x2,x3,x4. Now two matrices are equal if and only if each entries are equal, so you'll get 4 equations, then solve these equations for x1,x2,x3,x4
Could a set of 3 vectors in R4 span all of R4? The answer is no because not every row has a paivot
What if every row has a pivot, but not every column?
Also if there is free variable, it means infinitely many solutions, does it mean the vector set can span all of R4?
Well think about it
The columns in which the pivots are on have to be different
So that means that there are 4 pivot columns
And there are 4 columns
What if every row has a pivot, but not every column?
That requires having more than 4 columns in your matrix, which just shows that 5+ vectors can span R4.
Having a free variables just means the columns/rows are linearly dependent. If the columns don't span R4, a free variable doesn't change that.
vector spaces made from GF(2)
For matricies A,B has anyone seen this product tau before? Does it have any known properties?
Yeah, damn you are right, didnt even notice that. Thank you so much
for Q6, could we just show that it doesn't contain the zero vector?
by doing p(0) = a + 0 = a
@wintry steppe suppose a+t^2 = 0 for all t in R
this is impossible
since polynomials of second degree have exactly two roots counting multiplicity
I have this question and I'm not sure my proof is correct, can someone check my logic please?
T:V->V linear transformation
for every v in V, there exists w in KerT, u in ImT s.t u + w = v
prove T(v) = 0 if and only if T(T(v)) = 0
one side is simple
If T(v) = 0
then T(T(v)) = T(0) = 0
If T(T(v)) = 0, then T(v) in kerT, and if T(v) in kerT then T(w) + T(u) in KerT, but u is already in kerT therefore:
T(w) + T(u) = T(w), thus T(w) in kerT
In the end, T(v) = T(w + u) = T(w) + T(u) = 0 + 0 = 0
I didn't really use the fact that w is in the image
Is Im(T) analogous to the range of a function?
image & range are synonymous in almost every use

Commander Vimes

Commander Vimes
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)
$\im,\Im$

$(S[f])(x) = \int_0^x f(t) \dd{t}$
moshill1
so would Im(S) be all functions..?
not all functions are integrals of some function
oof
yeah it was a multiple choice participation question but idk why e^x - 1 is in Im(S)
options were e^x - 1, e^x + 1, e^x - x
i prolly do not get defn of S properly
wait why tf you have e^x-1 and e^x+1
options of the question were $e^x - 1 \ e^x + 1 \ e^x - x$
moshill1
it's the white box at the bottom of the ss
Commander Vimes
@nocturne jewel
Oh i see it now
so is f(t) = e^t the only input of S?
OH I didnt sub in bounds properly that's why
I put in f=e^t - 1 and forgot that e^0 = 1
S(e^x-1) -> e^x - x -1
can anybody explain to me as to what i am supposed to do in this question
im very confused
just @ me please
@jaunty sage suppose a is 1x3 matrix and x is 3x1 matrix (i.e a is row vector, and x is column vector)
then find ax by usual matrix product
ye
sure
that i did
and got a
3x3 matrix
@dire thunder what am i to do after that
Cyoger

i mean recall what is dot product
alright then
oh how so do u mind correcting my mistake
you multiply row vector a by column vector x from the right
@cunning pier eigenvalues are exactly the roots of the charpoly
nah
Commander Vimes
okay, is there some requirement (looking at the calculation of charpoly) or does this hold always true?
ye i understand but also what about the second part @dire thunder
Cyoger
recalls what it means for dot product to be zero
perpendicular
innit?
also can the values of x1 x2 x3 be anything that satisfy the equation
@cunning pier always
or is there another method to use?
alright thanks
@dire thunder
i mean just think
you have constant vector a
and let x vary
solutions of ax=0 are then?
infinite?
what it means for dot product of a and x to be zero?
that a and x are perpendicular
or can you say that x is perpendicular to a?
we can
so?
how tf x which is soultion can be perpendicular to itself
im not sure i am following
how is x perpendicular to a

dudeeeeeeeeeeee
Quick question, does i hat always need to be equal to [1, 0] and j hat always need to be equal to [0, 1], or can i hat and j hat been any two linearly independent vectors which span the entire plane?
i and j are usually defined to be (1,0) and (0,1) but you can have any two orthogonal unit vectors as basis for plane
do they have to be orthogonagal?
well in fact you can have any basis
you just want it to span vector space and be linearly independent
ok, and for it to span vector space, that means if your were to multiply i, j, and k by different scalars, the vector created by their sum can reach any place in space
yes
What are the rules when trying to gaussian elimination inside a determinant?
I know that if one of the rows gets canceled then the determinant is 0
but you can't just willy-nilly eliminate like in a normal matrix right
the only row op that preserves det in general is adding a multiple of a row to another
idk wym
R2 = 2 * R2 - 3 * R3
this might cause R2 to be 0 in a normal matrix
like just in general
as an example
lol
can I multiply a row by itself is what I'm asking
like if the row was (-2, -4, -6) I can't just call it (1, 2, 3) because that changes the determinant
R2=2R2 is NOT multiplying R2 by R2. it's scaling R2 by 2
also by row op i mean elementary row op. 2R2-3R3 isn't an elementary row op. it's scaling R2 by 2 then adding -3R3 to R2
ah I see
adding -3R3 to R2 doesn't change det. scaling R2 by 2 also scales the det by 2
if I'm trying to prove the determinant is 0 then this doesn't matter right?
So I'm basically asked if 8 is an eigenvalue of this 4x4 matrix
I just put in the determinant and scale matrices and if the determinant is 0 the scale didn't matter, I can just say that as a footnote?
is that okay to do?
if 8 is indeed an eigenvalue then Det(A-8I) = 0
so I don't need to worry about scaling ops?
after scaling R2 by 2, the det is scaled by 2. after adding -3R3 to R2, R2 becomes a 0 row, so det=0. the det of the original matrix is 2*0=0
right right
so I think that's what I said
is this an iff situation?
Det(A-xI) = 0 <=> x is eigenvalue?
the other row op, row swap, negates the det. so scaling & row swap in general changes det but as long as you get a matrix whose det is 0 then all the extra factors you picked up don't matter, the det of the original matrix is 0
it follows from det being multilinear
det(A-xI) is A's characteristic polynomial. eigenvalues are DEFINED as exactly the charpoly's roots so that's an iff
thanks
Another question, I've asked here before but actually I misunderstood
Why do skew-symetrical matrices only have non-zero eigenvalues in C?
so I've been trying to do this operation to show it
Av = xv => (Av)^T = (xv)^T
v^TA^T = xv^T
v^T (-A) = xv^T
and I got kind of stuck
basically trying to show -x = x, and thus the only answer in R is x=0
work the same way but start with v^T Av
$v^TAv = v^Txv -> (v^TAv)^T = (v^Txv)^T$
blackmamba[Beatrix Kiddo]
$A^Tvv^T$?
blackmamba[Beatrix Kiddo]
wait no..
yeah doesn't make sense dimensionally
so not a chance
I guess the real issue is how do we take this and use it for 3 matrices? $(XY)^T = Y^T X^T$
Merosity
$(v^TAv)^T = (Av)^Tv$
blackmamba[Beatrix Kiddo]
is that not right?
aha good
blackmamba[Beatrix Kiddo]
yes good now you're getting it
thats the left side, let me try the right
$(v^Txv)^T = (xv)^Tv = v^Txv $
since x^T = x
$v^TA^Tv = v^Txv -> v^T(-A)v = v^Txv ->
-v^TAv=v^Txv -> -v^Txv = v^Txv$
Are there any well known introductory texts for $F^n_2$?
$-xv^Tv = xv^Tv$
blackmamba[Beatrix Kiddo]
$-> -x = x$
blackmamba[Beatrix Kiddo]
yeah, and specifically why is it that we can say this?
yeah that doesn't really make sense because Av = xv holds true for all As and all x's for v=0 so yeah.
yup
you're welcome
there's a similar kind of proof to show symmetric matrices have all real eigenvalues
and another similar one that shows that different eigenvalues of a symmetric matrix have orthogonal eigenvectors
$A^T = A$ is symmetrical?
blackmamba[Beatrix Kiddo]
yeah
although instead of using the transpose you'll have to use the complex conjugate and transpose
I wouldn't worry about it for now, it'll come up eventually, just wanted to mention it so you don't forget the trick as a one time thing is all
fun lol good luck
I've been hard screwed over by it
My professor likes proofs and stuff like that, he didn't do a ton of super technical stuff taking ages, sadly because corona and stuff like that the test was changed like 2 days beforehand
into being very technical
which is what I'm weakest at lol
that sucks yeah
if i have two variables that become free variables can they be equal to the same parameter t, or do they need to be independent. ie could i have x3 = t, x4 = t or would I need to do x3 = t, x4 = s
are the dot product and cross product commutative?
what do you think? have you tried out some vectors?
yes
and so far
the dot product seems commutative
just tried it
and the cross product doesnt seem commutative
strangely enough
If you think about what the dot product is, it should make sense why it is.
$\vec{a} \cross \vec{b}$ seems to be equal to $-(\vec{b} \cross \vec{a})$
The Rock Obama
Exactly
that would make sense though, if were using the right hand rule
I tried to get an intuitive answer, but I can't see why
so if I'm not wrong:
the dot product projects a vector onto another one, and then multiplies the magnitude of the projected vector and the other vector
well if you think of the dot product formulaically
you're just multiplying vector elements and adding them, right?
and we know that elements in a vector commute
yeah
under + and *
oh
so certainly the dot product commutes as well
but, as you correctly obesrved, the cross product does not
in fact, we have a term for a x b = -(b x a)
"anticommutative"
haha that's cool
standard subtraction is another example of an anticommutative operation.
The Rock Obama
right
i dont understand this proof
specifically how the part under 1 < k < j simplifys
<@&286206848099549185>
when j = 2 and k = 1
im getting $$\langle e_2 , e_1 \rangle = \frac{\langle v_2,e_1 \rangle - \langle v_2,e_1 \rangle \langle e_1 , e_1 \rangle - \langle v_2,e_2 \rangle \langle e_2 , e_1 \rangle}{x} $$ where $x$ is the denominator. too long to write
-_-
gram schmidt process is from hell
Yes
somehow <v2,e2><e2,e1> is zero but i dont see how :/
Is there an operation that computes the product of two sums? I have two vectors which I'm multiplying after summing each individually, but would like to use numpy to do it more efficiently. It's essentially an outer product, but then I want everything summed up too.
I think all the cancelling comes from the assumption that (e1, ... e_j-1) are orthonormal
er
So all the terms in the numerator where you have an inner product <something*e_i, e_k> (where something is a scalar from the <v_j, e_1>'s inside of the big < > and i =1,...,j-1 ) are zero
why
Cause taking the inner product of two orthogonal vectors gives you 0
And the something doesn't matter, since it's a scalar
Does that make sense?
it does
Okey 👍
I have this matrix
4 1 1
1 4 1
1 1 4
What does this tell me about the determinant?
I know there's something about a matrix being symmetrical
I just don't know what it is
or I think I do mm
thank you
Sure! 🙂
ok slight issue
in the example
i have shown above
we dont know that e2 and e1 are orthogonal
@neat dragon
so when j =2 and k=1
$\langle e_2,e_1 \rangle = \langle \frac{v_2 - \langle v_2,e_1 \rangle - \langle v_2,e_2 \rangle e_2}{x} ,e_1\rangle$
Yes
we cant cancel the <e2, e1> ??
since we are actually tryna prove that they are orthogonal
Do you know about linearity of <>?
yes
The e's are orthogonal up to j-1
That's part of the induction hypothesis
Try to split up the big <> into separate terms by using linearity
Something like <v_j, ek> - <e_1, ek> - ... - <e_j-1, ek>
(ignoring the scalars and the denominator)
Great 🙂
.
😅
,rotate
thanks
I've calculated the kern for this matrix
I want to know if it's surjective now since it's not injective (Kern(f) =/= 0)
I think you mixed up + and - in the second row ?
it's the finite field F4
Ah
so it should be correct
(little bit unsure about the 1 and alpha)
but alpha +1 is guaranteed correct
what does that tell me?
Have you had a theorem about the dimension of the kernel / image ?
I forget what it's called
dim(im)=n-dim(ker)
Where n is the dimension of the space that's being mapped into
So what is n in your case
dunno, can't anything in my notes
What is the definition of surjectivity?
For matrizes I don't know
You can apply the general definition here
Yeah
That all points in the space that you're mapping into are reached
So if everything is going into the kernel
There's "nothing left" for the image
if i have two variables that become free variables can they be equal to the same parameter t, or do they need to be independent. ie could i have x3 = t, x4 = t or would I need to do x3 = t, x4 = s
I'd do s,t
great, thanks so much
yeah if they're both t then that implies 1 free variables instead of 2
that makes perfect sense. Thank you
Hello - I had another difficult(I think) question and was hoping you can tell me if I got it correct
Q:R^2 -> R^2 linear transformation
dimKerT = 1
sqrt(2) is an eigenvalue of Q
w !=0 in ImT, u != 0 in KerT
prove that w and u are linearly independent.
First of all, since sqrt(2) is an eigenvalue, then T(v) = sqrt(2)v for some v, this means that sqrt(2) is in ImT and thus v is in ImT
Because dimKerT = 1, we can conclude dimImT = 1 as well, thus w and v are linearly dependent. In other words, w = cv for some c
Secondly, if w and u were linearly dependent, then w = tu, and thus cv = tu or v = (t/c)u
T(v) = T( (t/c) u) = (t/c) * T(u) = 0
In other words, T(v) = 0
but this is impossible, because T(v) = sqrt(2)v, and v cannot be the 0 vector as v, w ,are non-zero vectors - we conclude that w, u must be independent
are integers modulo 8 over integers modulo 2 a vector space?
If a, b, d equal 0
no prob
for gauss jordan reduction, can you have two 1's in a row where the first one has zeros above and below it, and the second one doesn't?
we only care about the first 1 (the leading 1)
is it possible to have a second 1 that becomes a free variable or does that make the system inconsistant?
why wouldnt it be possible?
the only thing you really care about when doing rref is the leading ones and their pivot columns as diagrams such as this try to stress
https://puu.sh/HaRtW/6e4ee798e3.png

@hollow finch gotcha. thank you so much for taking the time to explain and find those charts to show me. I really appreciate it
can someone help me understand how I'm not properly inversing this matrix?
https://images.irenebot.com/bonusbaby_everglow_n2r5td.png
https://images.irenebot.com/exo_after_school_y1gyoo.png


correct answer:
https://images.irenebot.com/3ye_dreamcatcher_tv34ik.png

looking back I know I could have started off with R2 - R1, but shouldn't I still get the same outcome?
recheck what you did in this step
-1 - (-1) is not +2
might be more mistakes but thats the first one i saw

Anybody interested in studying University level Linear Algebra together?
Long term (8-10 weeks)

all that work is proof that the adjugate is the best way to get the inverse of a 3x3 if it's not possible by inspection
How would we do it?
I am week 2 in out of 7. Currently at the chapter discussing vector spaces and linear spans. I am only constraining myself to R^n, matrix spaces and the polynomial vector spaces.
I am currently following Linear Algebra done Right.
I just want a study partner so that we can motivate each other and finish the course in a designated time frame. I was thinking on doing 1 chapter per week. We can log out doubts, do assignments and sync up in 2-3 days or 1 week depending on your availability
idea ain't bad
ayo guys, i have a question, doing the matrix adjugate of a 3x3 matrix the plus minus will be like this:
`+ - +
-
- +`
following the 1st plus and alternates, but doing a 2x2 isnt the same? im getting a wrong answer doing an exercise
- +`
I think it's just
+ -
- +
det(2x2 matrix) =ad-bc
#probability-statistics is more akin to correlation / pearson's co-efficient
@wintry steppe Which scatter plot do you think has the worst "line of best fit".
hello, what does it mean for a set to be independent in a vector space V?
if any (finite) linear combination of any of its vectors is zero, then the scalars of the linear combination are zero
when proving a set is a vector space is it necessary to prove all axioms or does it depend on the question?
like for this axiom for example
if it's really obvious that it passes, generally do i still need to write it
isnt it just additivity, scalar multiplication and 0 vector
theres others but thats the 3 we use to prove a vector space
You can show a subset of a vector space contains the zero vector, and is closed under addition and scalar multiplication to show it is a subspace. But you need to show all the axioms, if you don't know your set and operations comes from a known vector space.
that sounds like the Naive test for subspaces

like we aint writing full on proofs in our LA assignments
so we use the naive test whatev u wanna call it
unless if the assignment is askin to check for all axioms
ur gonna do those 3
If you're asked "Is this a vector space" and you just check the operations are closed and 0 vector is in it, then you cant conclude it's a vector space
cause, for example, it might not have scalar distribution
u can check its a subspace tho
We aren't talking just about subspaces.
another quick question, about additive inverse. it says something about given a vector (v for example) its inverse (-v) their addition should equate to 0. if my scalar multiplication is defined as something other than the regular operation i need to apply the newly defined multiplication to -v right?
or can i just make a vector that satisfies the conditions so that (v + something = 0)
@humble oak -v is (-1)*v but that's after you know it's a vector space. -v is just how we write the vector w that satisfies v+w=w+v=0. So you need to show such a vector w exists using the addition defined for that set.
It has nothing to do with the scalar multiplication
thanks!
Np
When performing the elementary row operation of interchanging two rows, do I interchange the variables?
That was really badly worded
Ohhh wait it doesn't matter
Never mind lol I'm dumb
I'm so confused where to start with this :/ the leading entry of each row is even but then there's always some odd entry later and I feel like if I start working with fractions I overcomplicate this
I don't know much yet, just elementary row operations
Would prefer to solve using Gaussian Elimination
yeah good thinking, avoid fractions until the end
Due to their evenness I can't subtract anything or any multiples to get a leading 1 in R1 right??
first thing I'd do is get rid of everything below the first entry of the first column
I'd subtract 2 of the second eqn from the third eqn
then subtract 3 of the first eqn from the second eqn
then just leave a 2 there
Okay, so the resulting augmented matrices would be
-
-2R2 + R3 --> R3
[ 2 3 3 | 3
6 6 12 | 13
0 -3 -25 | -24 ] -
-3R1 + R2 --> R2
[ 2 3 3 | 3
0 -3 3 | 4
0 -3 -25 | -24 ]
Hmm
Still don't see any way to turn that 2 into a 1 :(
Oh wait
Hmm
that's why I say just leave it
Would I be turning it into a 1 later? The problem says solve using Gaussian or Gauss-Jordan
yeah in the end you will
next take the middle row and use it to get rid of everything above and below it in that column
Gotchya, I could add R2 to R1 into R1, then -R2 + R3 --> R3
perfect yup
Do you think it'd be a problem if I typed the matrices in chat like before?
do whatever you like
-
R2 + R1 --> R1
[ 2 0 6 | 7
0 -3 3 | 4
0 -3 -25 | -24 ] -
-R2 + R3 --> R3
[ 2 0 6 | 7
0 -3 3 | 4
0 0 -28 | -28 ]
I can multiply R3 by -1/28? 😅
Hmm
yeah definitely
Just out of curiosity, why work through it like this? Everything I've seen recommends trying to work it row by row, trying to get R1 perfect and then moving on to R2
Or at least that's what I understood
it is working it out perfect except we're not making the pivot 1
this is just to avoid dealing with fractions
just mean the entries on the diagonal
Ohh
the first column and second column has all 0s in it
now you're in a good place cause the last row will be really simple just 0 0 1 1
Will they eventually turn into 1? Don't they need to be 1 for it to be in REF or RREF?
Yeah, -1/28R3 --> R3
we're nearly done so you'll see in a second
- (-1/28)R3 --> R3
[ 2 0 6 | 7
0 -3 3 | 4
0 0 1 | 1 ]
I could add R2 and R3 to R1
Makes all of R1 even
For a perfect division by 2
hmm?
just subtract the last row from the first and second rows to make it all 0s above it in the 3rd column
[ 2 0 0 | 1
0 -3 0 | 1
0 0 1 | 1 ]
now divide
[ 1 0 0 | 1/2
0 1 0 | 1/-3
0 0 1 | 1 ]
and that's it
by leaving these diagonal entries with numbers instead of 1 on them, you save the division to the very last step
you can still divide if it's not a fraction though ofc
You did -3R3 + R2 --> R2 and -6R3 + R1 --> R1?
This is so fun lol, it's like a puzzle 😝
yeah
lol can be yep
you'll probably enjoy evaluating determinants cause there are some fun tricks to do kind of similar to this too
Thanks for all the help man 😁 ah yeah I hear that name come up every single time linear algebra is mentioned LOL, I've been watching some of Grant Sanderson's Linear Algebra videos for fun and they're interesting
But not as intuitive as the calculus series
I never watched any of those, but if they're working for you, good
cu+V
You define c•(u+V) to be (cu+V)
You know quotient groups?
The idea of a quotient space is to make a vector space with quotient groups as the abelian group
cosets
For a ring you would need to define a multplication Between 2 elements of the quotient group
Multiplication here is just scalar multiplication
how do i find a vector that would make a system inconsistant? for Ax = some vector b
When does there always exist a linear operator T that maps the basis from V to basis of W?
When the basis have the same number of dimensions?
that's what I immediately think of at least
Make it so that A is m > n, or such that m = n and det(A) = 0 I think, where b ≠ 0
oh
Is it also true if dimV > dimW right
Hmm well if dim V > dimW then you could establish a linear map, but it loses it's symmetry. You can't establish a linear map both ways. In linear algebra terms this means that the linear transformation matrix created would be rectangular instead of square, and it wouldn't be invertible.
So, I'm not sure if this part would apply to the question. You can definitely establish a mapping, but it would lose a lot of qualities like injectivity and whatnot.
I get the feeling that this question is trying to talk about how all vector spaces of the same finite dimension are isomorphic. If that seems about right then specifying dim V = dim W is what you're looking for.
Yea I see, thanks
I just forgot most of what I learned in lin alg, which I suddenly need again..
@zealous junco thanks for the response. So the matrix I have is a set 4x4. What do I do from there?
you want to find a vector b given the matrix A?
I want to find a vector b that makes Ax = b inconsistant
I guess you first do gaussian elimination on A
so ive done that
you get all the row vectors and find a vector that the row vectors doesn't span
that would be your b
wait i could be wrong, and sorry i dont have more time to think about this...
yea i actually forgot how to do this..
i'm looking at a similar solution and the have the definition as some weird P(A|b) not equal weird P(b)
and they set b equal to one of the columns with one different entry
and then they put that as the solution to an augmented matrix with A
and then row reduce
and get an inconsistant answer
but i'm not sure why it works
or what the weird P means
<@&286206848099549185>
oh ok yea i got it
so when you row reduce you should have gotten another b1 right
like b should become something else
then as long as the thing b becomes doesn't have a zero in 4th entry, i believe it's inconsistent
so could if i have a column like [1,2,3] could I make an entry of b a non factor of A like b[1,2,4]?
How do you solve a matrix (find the solution to the system of equations) with more variables than equations using Gaussian or Gauss-Jordan Elimination?
THis is the problem in question
I performed -R2+1 --> R1, 3R1 + R2 --> R2, -R1 --> R1, and (1/2)R2 --> R2 in that order to get the system (matrix)
1 3 -12 | 20
0 1 5/4 | (-6/4)
How would I solve from here? Express one of the variables in R2 in terms of another variable and then back-sub into R1 and simplify?
That means you have free variables
if you choose a value of x_3,x _1 and x_2 will be uniquely determined by that value of x_3
Oh gosh, I wasn't paying attention to the parametric solution bit 😅 people have tried explaining it to me before (I don't think in this server) but I don't get it
Do I set y = t and then express t in terms of z?
Because in my final matrix R2 only has y and z
Why am i gettin this wrong?
can someone try this question and see whether yall are gettin teh same answer as mine?
Let's say v,T(v)... Spans V. U(v) will be in V,i.e.,
U(v)=g(T)v for some polynomial g
U(Tv)=T(Uv)=T (g(T)v) = g(T)(Tv)
Similary you get U(f(T)v)=g(T) (f(T) v) for any polynomial F
i.e. U(w)=g(T)w for all w in V
@pastel saffron
i.e.,U=g(T)
U(v) will be some w(where v is a generator of the T cyclic space)
And w will be g(T)v
Since V is T cyclic
That's your g
You mean this step?
This?
You assume UT=TU
Because V is a T cyclic subspace, any element in V will be g(T)v for some polynomial g
And U(v) will be an element in V
Yes
Constant term is a_0
p is just a_0+a_1t+a_2t^2...
p(T)=a_0 I + a_1 T + a_2 T^2...
Here I is identity
And P(T)v=a_0 v + a_1 Tv+ a_2 T^2v...
P(T) is a linear operator
Yes
Yes
What's the difference between base and kernel?
yes. however set of vectors can be also describe a subspace.
A basis won't be a definition if it's the same as a set of vectors like kernel won't be a loose term for subspace
What?
i havent reached kernels yet, my book says that a bases are Unique linear combinations of vectors
Sacc makes a very good point, that a basis needs not be a subspace. It's the least amount of info necessary to express a vector space
On the other hand a Kernel is just a specific type of subspace
They're not really even similar objects haha
yeah the question is confused enough
that answering it directly seems only half adequate
that's why I think 3B1B might be better
so V={(1,0),(0,1)} would generate the entire subspace. Does that make V a kernel or basis?
-_-a
A kernel and basis are really different!
Saying that something is a basis is like saying that something is an ingredient
ingredient for what?
{(1,0),(0,1)} is a basis for R², or the xy plane.
Not the only basis, but a natural choice
"A subspace to R^2 can be one of the following: the kernel, a line through the origin or the whole vector space"
So the whole vector space, R^2, is just the plane, and the whole space R^3 is just the 3D-room?
"{(1,0),(0,1)} is a basis for R², or the xy plane."
What does {} mean in this context? The linear span? The set of all linear combinations of the vectors (1,0)(0,1)? Just asking because i wanna familiarize mysef with english notation
Where's that quote from? I didn't say it lol
first quote isnt you, second is
All subspaces of R² are one of the following:
- A line
- R² itself (all vector spaces are subspaces of themselves)
- The 0 space
This is just because R² has dimension 2, so the subspaces all have dimension 0, or 1, or 2 which is pretty limiting
.
{ } denotes a set, which is roughly a collection of things. I used it to say "this is the collection of vectors that is a basis"
thanks
so it is wrong to say R^2 is a plane because it is a set of vectors and those set of vectors may conatin linearly dependent vectors that doesnt span a plane?
It comes from discreet math for group / collection. We study that and so the lecture uses it to mean a general group.
R^2 is a plane. Who said otherwise?
What is a plane?
R^2
2D shape within in a 3D space. x(1,0)+y(0,1) is a plane within R^3
hmm
a plane contains a set of points that is spanned by two non-parallel vectors, or that is how i understand it but i may be wrong i started with this a week ago
so you add inner product to it as well.
Nice
to me, a plane is from geometry
but I intuitively know what you mean
I would also ask, do you insist that a plane must be inside a 3D space?
What about a plane in 4d space, or just a plane by itself?
I might say "plane" if I'm being lazy or just want someone to picture the problem. No linear algebra course will put a proper geometric definition of a plane forward
"2-dimensional vector space" is safer haha
Where does the A come from in the second step?
I am confused
Oh would it be
R2 += AR1?
its the only information about the exercise?
wdym
thats the whole exercise?
This is just a proof I'm reading
I'm still not completely clear tbh
On each step's operation
what does this mean?
I'm thinking NULL(B) means the nullspace of B
And sp means span
So any vector you can make with a linear combination of those two is the span
Idk im only 5th grader
And to put a picture in your head, will make a plane in 5D space
I'm listening
<@&286206848099549185> sos
Can a vector space contain a finite number of vectors?
Yes
Take some vector space over say F_2
Now, pick a vector. The vector space generated by that vector will be finite
@native rampart what is f_2?
Field of 2 elements
so, can a vector space be for example a square?

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Square as in the set {x^2 : x in R} ?
let's say that we have a vector space that contains the vectors i and j, that space over the field of F_1
is just three lines right?
F_1 does not exist
also when we talk about "vector spaces over a field" we need our vectors to somehow be compatible with the multiplication from that field
just talking about vectors "i" and "j" doesnt make sense unless you define what the multiplication from the field is
and how they interact with it
is not a field.
anyway, i have no clue how to address "is just three lines"
i feel like you fundamentally misunderstand what a vector space is
vector spaces dont necessarily have to have a direct analogue to euclidean vectors
so you cant necessarily visualize them as "lines"
(in fact, "line" in the context of general linear algebra is often used simply to refer to the span of a single vector - since the geometric notion doesnt really make sense for most spaces)
If I span his set of two vectors then I get a vector space right?
spans of vectors are vector spaces, yes
they form a subspace of the space the vectors are from.
it's a good (though easy) exercise to prove this fact
I have some excercises to define two operations on a set and then prove it is a vector space, but I am skipping it unfortunately. The pace this course is going at is too fast so i ought to settle with just knowing how to prove that a set is subspace of a certain vector space.
I am not a math major, I am already behind, I should know least square and gram schmidt by now.
i mean regardless, the fact i mentioned is of the form prove-this-is-a-subspace
so if those are the exercises youre doing, that qualifies
its not really... much of a proof though
proof by "duh"
There are like 8 axioms for vector spaces that need to be satisfied or whatever you call it, i remember that we used something that kinda was circular reasoning to prove that a*0=0 (a is a real number) using a set of axioms and we used tables to prove it. Not sure if that counts as proof, I reckon you can do something similar to vector spaces?
uh i sure hope it wasnt circular reasoning
since thats not valid
but yes, if you use a table and you exhaust all cases (or at least enough cases that you can WLOG the rest away), that suffices as a proof
it's usually a very inefficient proof method for not-small things though
can a vector field be defined over the field F{0}?
there is no field F_0.
im not sure what F{0} means
could you describe the field F{0}?
F(x,y,z) = (0,0,0)
...
so F is... a function
and not a field
you cant define a vector space over a function, no
that doesnt make senes
fields dont have vectors, vector spaces have vectors
in a linear algebra context, we often call field elements scalars
pfff, I'm messed up
anyway
a field that consists only of the 0 element doesnt exist
we generally require fields contain at least 2 elements
the typical way we do this is by saying 0 must not equal 1
there are some good mathematical reasons for this, mostly that if we allow F_1 to be a field, we have to throw out basically all our theorems about finite fields
or add a special case for F_1
oh, so that they can have the necessary properties
for example associativity
you can't do that if you have less than 2 vectors
eh you could
the group of 1 element for example makes sense
as then the theorem just becomes
e * (e * e) = (e * e) * e
if e is your only element
well as mentioned
the ring with 1 element doesnt really behave like a field
whatsoever
the notion of "characteristic" doesnt make sense, for one
geometry over it is nonsense*
- (we can KINDA do geometry over F_1, but it wont be the same as geometry over the trivial ring)
it also screws up the theorem
"all finite fields have order p^k for a prime p"
i guess you could just allow k = 0 and that still holds but
it kind of goes against the "spirit" of the result
which is really a deep statement about the characteristic of fields
(see https://math.stackexchange.com/questions/3756806/why-isnt-the-zero-ring-the-field-with-one-element)

Mathematics Stack Exchange
I've heard that in the study of finite fields, and other concepts related to finite fields, mathematicians have found a sort of gap: there are various results and things that seem like they corresp...
the honest reason is that theres very deep mathematical reasons to not consider the "field" (ring) of 1 element to be a field
but these arent really obvious in a first course
typically speaking
how long have you been doing this kind of math?
why do you know all these stuff?
(and I don't)
uh, almost a decade now but i knew this after my first abstract algebra course
I finished linear algebra but I don't know this stuff as well as you do
linear algebra kinda "speedruns" the definition of a ring/field since it only really uses them to talk about vector spaces
which are the object linear algebra is really studying
abstract algebra, specifically ring theory, studies fields and rings in their own right
in much greater detail
finite fields in particular are very well-behaved, which is a nice way to say "not very interesting"
pfff, I have this problem that I can't move on if I don't fully understand something to it's roots... It costs me a lot, wasting my time trying to figure out how and why everything works from skratch
that's why I will never succeed
(in math and physics)
anyway, again thanks a lot for your time and effort
by the way @limber sierra for a transformation to be invertible, does it also have to be an isomorphism?
@wintry steppe ok you crossposted to q0. in the context of linalg (along with other algebra topics), isomorphisms ARE invertible maps
when dealing with the vector space P_n does it only have one element?
i keep seeing that it's suppose to have element(s) but from this
isn't it just one element
no
a_i in R is short for 'each coefficient a_0,a_1,...,a_n can individually vary over real values'
so P_n is very much an infinite set
so to name an example of an element, a_0 is one element, a_1x is another?
no. each element of P_n is a polynomial of degree at most n
so i could have polynomial degree 0, polynomial degree 1, ... , polynomial degree n. those are all the elements?
say n=2. P_2 is the set of polynomial of deg at most 2. examples of elements in P_2 are the constant polynomial 6, a degree 1 poly 3x+8, and degree 2 poly 4x^2
ah okay
dk why my messaged are being deleted but ok
ty all i understand now 😄
you're welcome

someone's trigger happy on the delete button oop
happened to me before, quite curious
which book offers a decent amount of exercise on similarity transformation?
Anyone knows a good intro linear algebra book that also goes over bilinear forms and quadratic forms?
@wintry steppe thanks a lot!
there's a whole part in there on the second derivative test in MVC lmao
Mmm I've noticed that many linear algebra texts introduce vectors as straight arrows almost right away
that Friedberg book does that
so does Axler
gotta ease the high school kids into the book somehow
Try Hoffman Kunze

what does it mean for a set to span a vector space?
every vector in the space is a linear combo of the vectors in the given set
so, for instance if i had the vector space R^2
if i had a set that contained 2D vectors that set would span R^2?
gimme a set
uhhh