#linear-algebra
2 messages · Page 146 of 1
mirzathecutiepie:
I dont have the linear equation yet
im supposed to be solving for the linear equation of the line of best fit using a system of linear equations
I just dont know where im supposed to be getting the equations for the system
or maybe $\vec{v} = (m + b, 2m + b,3m+b)$ and $\vec{y} = (2,3,5)$
mirzathecutiepie:
I think I may have gotten it
so I made three vectors AB BC AC
used those as the equations and then the y values of the origional points as the y vector
not sure how to use the commands to show you the matrix but I think its right considering it should have no solution and I get a row of zeros which means infinite?
an example?
yeah a row of zeros means either no or infinite solutions, it depends on what you have
like if you have one row $[0~0~0 \mid 123]$ that's no solutions
right
mirzathecutiepie:
I have row of zeros equal to zero
so im not sure if thats correct then because the question says that row reducing should show no solution
however infinite solutions could be seen as no solution as there is no singular solution
actually i believe there's something called linear regression
yes
yea so what im supposed to be doing right now is called least squares regression which is the math behind a linear regression that gives line of best fit
I just dont know whether my initial matrix is right
ive heard the name before lol
yea im sure you will come across it eventually 😄
hm lemme get out a pen and paper and muck around with this
we'll see, stats is not my thing
yea ive taken stats which is the only reason I know about it
that was actually the first thing I did when it said find line of best fit was solve it like stats
but that uses calculator and my prof wants this done by hand
So using the matrix I setup that im not sure is correct the rest of the math works
im gonna do everything out then compare my answer to my calculator answer
oh try that, do share once ur done tho
ah i think i got a solution
consider this system of equations
$\begin{bmatrix} 1 && 1 \ 2 && 1 \ 3 && 1 \end{bmatrix} \begin{bmatrix} m \ b \end{bmatrix} = \begin{bmatrix} 2 \ 3 \ 5 \end{bmatrix}$
mirzathecutiepie:
you can row reduce this
and the last row row reduces to $[0~0~\mid~-1]$ (if i did the row reduction correct lmao)
so where did you get the column 111 for that matrix
just cuz mine is almost identicle
mirzathecutiepie:
just [1, 1, 2]
Okay so it says form an equation in m and b
could i get some assistance when one of you free up
so we have y = mx + b, and we want this to have it go through (1,2) (2,3) and (3,5) (or at least come close to) so therefore we'll just substitute in the values and we have 3 seperate equations for x = 1 we have y = m + b, for x = 2 we have y = 2m + b and for x = 3 we have y = 3m + b
sure :)
oooooh did you create a y=mx+b equation for each
yeah
its solving second order cauchy euler de
u should probably try row reducing it on ur own btw my row reduction is famously horrible
ofc
ooOP i know jack shit about diff eqs
well for different lines it would
so for each equation we have (1)b
We're proving that we can't have any one line that goes through each point though
so we can fix a value of b i think
 not if the row reduction turns out to be wrong lmao
not if the row reduction turns out to be wrong lmao
okay one question
based on the one paragraph i've read on least squares approximation
is it basically just trying to minimize the variance (in a sense)
thank god lmao
so the new system would be
[1 1 1 | 10]
[1 2 3 | 23]
after transpose and multiply
or is that not how I would set it up to solve for m and b?
one sec im doing that step rn
hey can i ask for advice here?
im trying to understand this algorithm/proof for diagonalising quadratic forms
hoooly shit thats linear?
here Beta are entries of the matrix of the quadratic form, but i dont understand how beta changes from the bullet points above where i have reordered the basis elements
yeah these are bilinear maps
okay i believe you'd have the equation
[14 6] [m] = [23]
[6 3] [b] = [10]
Was too lazy to do the whole bmatrix thing
ah im afraid i can't help with that, someone else will come along though and help surely
i have no idea about that lamo
If beta_11 = 0 you've already switched it with something else nonzero
oooh I see what you did
It's the step in the second bullet point
for some reason I kept thinking A transpose would cancle a but its not inverse its transpose
okay so when i interchange b_1 and b_i, what even happens?
Well then that b_i becomes b_1, which has nonzero entry on the diagonal
bahah yeah it happens sometimes to me too
so the matrix for this form also changes?
Because that's why you chose b_i to begin with, to satisfy this criterion
I believe $(A^T A)^{-1}$ is known as the pseudoinverse
mirzathecutiepie:
Yes, we're rearranging it by changing the basis one step at a time
basically you force nonsquare matrices to have an inverse
how exactly does the matrix change?
okay i should probably stop interuppting
is it just that beta_11 and beta_kk swap?
Whenever you change bases of a vector space, the matrix of a linear transformation is changed via conjugation
A -> UAU^-1
i see
yes
so this Beta_11 in step 2 is completely different
would be clearer if it was called Gamma_11
?
so you can "force" an inverse for nonsquare matrices (if the resulting matrix itself is a singular matrix then it might be a problem but at least we tried)
Yes it is something brought over from another row/column and now sits in the 11 spot of the matrix, after changing basis elements around
right but I dont see how A*A^T became a 2x2 matrix in the system you setup
we aren't doing A* A^T it isn't commutative
Av = y and we multiply by A^T
On the left
so we get A^T*Av = A^Ty
yea but I thought av was the matrix
[1 1]
[2 1]
[3 1]
and mutliply them
and we then multiply that
and get a 3x3?
yeah
No we get a 2x2
Look at the transpose one
we have 2 x 3
and look at the normal one
we have 3 x 2
2 x 3 matrix times 3 x 2 matrix is a 2 x 2 matrix, the multiplication eats up the middle terms
I must be doing my multiplication wrong then
oof yeah
did you get it?
I just have them backwards
yeah that's what i was saying
oooh okay
yea
my brain cant keep track of all the rules at once
I make mistakes like that often
so I got your matrix but flipped?
[6 3]
[14 6]
is my whole multiplication process straight up wrong?
im taking column 1 of Av multiplying it by row 1 of A^T
yeah
i was confused when taking the transpose too but you can remember it this way
1st column 1st row
$\begin{pmatrix}
a_{1,1} && a_{1,2} \
a_{2,1} && a_{2,2}
\end{pmatrix}
mirzathecutiepie:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
this is a generalized 2x2 matrix
you just switch the coordinates
so $a_{2,1}$ goes to where $a_{1,2}$ is
mirzathecutiepie:
if that's confusing don't worry about it ur way of remembering it is good too
oepjif
Yeah just row reduce
and then back propogate
or do gauss jordan
[
\left
[\begin{array}{cc|c}
14 && 6 && 23 \
6 && 3 && 10
\end{array}
\right]
]
lmao
[
\left[
\begin{matrix}
1 & 0 \
0 & 1
\end{matrix}
\right]
]
Saccharine:
lol
even row reduce calc says the same
we either did something wrong
or this is the answer
mirzathecutiepie:
Compile Error! Click the reaction for details. (You may edit your message)
and this is NOT what my calculator gave me
[
\left[\begin{array}{cc|c}
14 & 6 & 23 \
6 & 3 & 10
\end{array}\right]
]
yeah we probably did something wrong then
lmao
Saccharine:
I had 23 and 10 switched
bahaha i was like how are we going to rework all of this
thank you saccharine
btw
that's why you use a computer algebra system that also prints out the latex for you
$\left[\begin{matrix}1 & 0 & \frac{3}{2}\0 & 1 & \frac{1}{3}\end{matrix}\right]$
Saccharine:
ew
$
\left[
\begin{array}{cc|c}
14 & 6 & 23 \
6 & 3 & 10
\end{array}
\right]
$
mirzathecutiepie:
bow before me
new answer match
btw sacchrine what CAS did you use?
LETS GO
I just use sympy
I just use sympy
@wintry sphinx In what scenarios do you use sympy?
basically anything that involves simplification of anything by hand
or differentiation or integration
I'm guessing it should be, since it seems to satisfy all the vector space axioms. Am I correct?
can someone explain subspaces to me, mainly closed under addition/multiplication?
do you understand the concept of closure
I havent heard that word before
closure is just being closed
do you understand a space being closed under addition and multiplication
i think so
like if you had r^3
it just means that the collection of vectors called V satisfy the parameters of V
im watching my lecture vids rn but they dont really help im not good at picturing concepts like this in my head
i think the easiest way to explain closure is that if you perform the closed operation on two components of the space then you get a component of the space
so two vectors inside of the collection
could you hop in vc call and help me with an online question? i understand if u cant for any reason
i cant go in VC rn
ok np
its something that is basically flat in spaces R^3 and beyond
thats how my prof explained it not word for word though
the simplest way to explain it is that a subspace is just a space within a larger space
and it satisfies 0 vector and is closed under addition and mutltiplication
this paper is really good
to understand it
and its fairly simply put
it talks about closure and subspaces
exactly your questions
could i send you a question from my hw?
ok
ok the way i understand it is that
in a situation where a,b and c = 0
like a 0 vector
then it satisfies the condition
is that correct in some way?
yes, the vector $\begin{bmatrix}0\0\0\end{bmatrix}$ is in that set, since $0 \cdot 0 \cdot 0 = 0$.
exactly
Namington:
so for question 1
what im thinkin gis that it is false
because any one of a,b,c can = 0 which satisfy the condition
but they could also not = 0
it is false
so its false
elaborate
could you give an example of two vectors from this subset, where their sum is not a member of this subset?
i think you have the right idea but its hard to parse
i dont udnerstand what that means
"closed under addition" means that, if v, w are two vectors in this subset, then v+w is in the subset as well
so to show that the subset is NOT closed under addition
like in some imaginary case a = 1, b = 2, and c = -3 so abc != 0
that doesnt satisfy abc=0
$\begin{pmatrix}1\2\-3\end{pmatrix}$ is not a member of that subset, so we dont care about it
Namington:
it is false but that is not the reason
basically my understand of this is that i just put imaginary situations in
which is wrong im now learning
your justification is invalid
let's go back to the definition of being "closed under addition"
ok why is the vector i gave not a member of the subset?
"closed under addition" means that, if v and w are two vectors from the subset
then v+w is also a member
the vector you gave is NOT a member of the subset
but that doesnt matter
because it doesnt satisfy abc=0
that tells us nothing about whether its closed under +
in order to show that something is NOT closed under addition
you need to give an example of two things from that subset
such that, when we add them
oh
we no longer have things in that subset
so is a = 1, b= 2, c=0 a member of the subset
that is in the subset, yes
because at least one of them must make the multiplication = 0
so i have to try and find a situation in that subset
where its not true
?
maybe i should give an example
let's take, say, the even numbers
the even numbers are closed under addition
since when i add 2 even numbers
say 4+6 or 10+14 or whatever
i get another even number
you have to find a situation where the sum of the two vectors in the subset arent in the subset
but the odd numbers are NOT closed under addition
since when i add odd numbers
say 3+5
it's possible that i get something that is NOT an odd number
in order to show that this subset is not closed under addition, you need to find two vectors $\begin{bmatrix}a_1\b_1\c_1\end{bmatrix}, \begin{bmatrix}a_2\b_2\c_2\end{bmatrix}$ that are members of this subset (so $a_1b_1c_1 = 0 = a_2b_2c_2$), but their sum is NOT in the subset
Namington:
so i have to find a case where two vectors added in the subset dont fit the subset
ahhh
its false because
vector 1
a= 1, b=0, and c =2
+
vector 2
a=0, b= 2, c=3
no longer satisfies the condition?
wow
i finally understand
ok so what about closed under mutliplcation
must be true?
if i use the same vectors the values that = 0 after being multiplied by any numer that !=0 are still 0
closure under scalar multiplication is true yes
wow this is not as hard as i thought it was
we know $\begin{bmatrix}a\b\c\end{bmatrix}$ satisfies $abc = 0$
Namington:
so if we consider $r \cdot \begin{bmatrix}a\b\c\end{bmatrix} = \begin{bmatrix}ra\rb\rc\end{bmatrix}$
Namington:
so i basically pull any two random vectors that satisfy the parameters and see if they can make the parameters no longer true
we now care about whether $ra \cdot rb \cdot rc = 0$
Namington:
by either multiplying or adding
but we know $abc = 0$, so we can rearrange $rarbrc = r^3abc = 0$
Namington:
ah i see
im not good at conceptual math but this still helps a lot
when we multiply by a scalar r
thanks so much
we still get something
where the product of its entries is 0
anyway, one important aside:
ok
in order for something to be closed, it needs to be true for ALL vectors
whereas in order for something to NOT be closed, you just need to find ONE example where it fails
is there an easy way to test that
or do i just have to do trial and error a couple times until i get an answer
hm ok
theres no "formula" or "algorithm" you can apply [well, okay... technically you can see if you can determine a space it's isomorphic to, say by the first isomorphism theorem, but that's a far more technical topic]
ok so basic question but is the 0 vector in 3 space just [0, 0, 0]
yes
ok im back and confused again
how can i multiply two vectors that have all values >= 0 and get a negative value?
and same goes for adding two positive vectors
well, you cant multiply column vectors
(using linear algebra techniques)
i'm assuming it's asking you to show closure under scalar multiplication
in which case, the scalars can be any number
in particular, they could be, say, -1
ok since i cant multiply column vectors i have to assume its multiplication by a scalar
?
i mean, in the first image you posted, it explicitly said "closed under scalar multiplication"
Hey, has anyone here taken an honors linear course ?
i don't know what "honors" means, but i did take the highest level LA my uni offered
if you have a question, 
I did ask
what are you gonna do with the honors LA students 
||or maybe  ?||
?||
@wintry steppe I figured out T = x +1 is injective but not a linear transformation
very nice
I'm not a maths people but want to study about machine learning so getting to study maths
hii can someone explain if this is true?
or at least why this is true
to me this is like saying if you multiply $\frac{d}{dx}$ with a function you'll get its derivative
which i think is kind of weird
mirzathecutiepie:
it's just notation
don't read too much into it
the multiplication isnt really multiplication in the usual sense but rather it's application of the operator
yeahh but
this wouldn't be a matrix then right
this is just an arbitrary linear operator of the form $T(x)=b$
mirzathecutiepie:
who said it was a matrix
L is an operator on a function space
function spaces tend not to be findim aside from toy examples
to express operators as matrices your space needs to be findim and you need to have a basis for it
aa so i can't really seem to wrap my head around this at all? this multiplication seems to make no sense
nvm i got it lol
A is a matrix assembled out of the col vectors a_i
@simple hornet Is that LADR? The two exercises 10 and 11 you posted earlier.
Anyone that can assist with this? Idk how to use the knowledge of geometric multiplicity to compute the two eigenvectors that correspond to eigenvalue -1. How do two different vectors spawn when the -1 is all there is?
You need a basis of Ker(A-(-1)I_3)
@simple hornet I know because i am currently doing LADR, although a much later chapter
Yeah I tried it
I get this result when substituting the -1 eigenvalue in the aug. matrix
And idk wt that means lol. I see only one eigenvector whose entries are all 0
Well just pick a vector that spans an independent plane
I guess 1,1,0 and 1,0,1
Or u could include 0,1,1
I suppose..
@crystal oracle oh wow that's cool, what chapter are you on?
if you pick 1,1,0 you don't get (0,0,0)
w8 I see your mistake
So why was I doing 4
that should work better
Is beyond me
Im so extremely idiotic
That I cant even
Either way
Lemme see this real quick
So this is it
Now what...
C1+C2 = 0
Oh is it because there are two free variables that I can compute two different eigenvectors?
you can compute 2 eigenvectors because the dim(eigenspace of -1) = 2
you have C1+C2 = 0 and C1+C3 = 0
Got it I think
so (1,1,0) and (1,0,1)
Simply speaking in noob terms, there are two free variables
Which is why I get two eigenvectors
So I have to find two separate "arbitrary" values for x2 and x3
From which I get two different e.vectors
well dim(2) <=> plane so you need 2 non colinear vector of your space to describe it
yes
np
Holy u were so helpful
I may need to come back later to annoy this channel some more w my ignorance though
don't worry everybody need help sometimes and so do I rn
I'm trying to implement the SVD for 2*2 real matrixes, so I need A=S U V with U and V rotation or reflection matrixes and U a scalar one
the issue is that I sometimes get -A
Cant help u there I cant understand half of wt ur saying
Sorry
Hope u find someone thats actually capable lol
so I choose S and V so that they match wikipedia svd page requirement (orthonormal eigenvectors of the right matrices) and fix their 'type' (rot or relf) so that the determinant is right
but am I missing something? I didn't get a proper class on the subject so I could be missing something simple
would anyone be able to help me with this
basically you want to find a linearly independent vector
A vector that is not a linear combination of the first two
Can you think of a vector that you can't get by adding or subtracting multiples of the two vectors?
Try a few permutations
so i just need to come up with a vector that you cant get by adding or subtracting u and v?
in that case couldnt i just choose literally any value?
like [100,100,100]?
in that case couldnt i just choose literally any value?
not quite
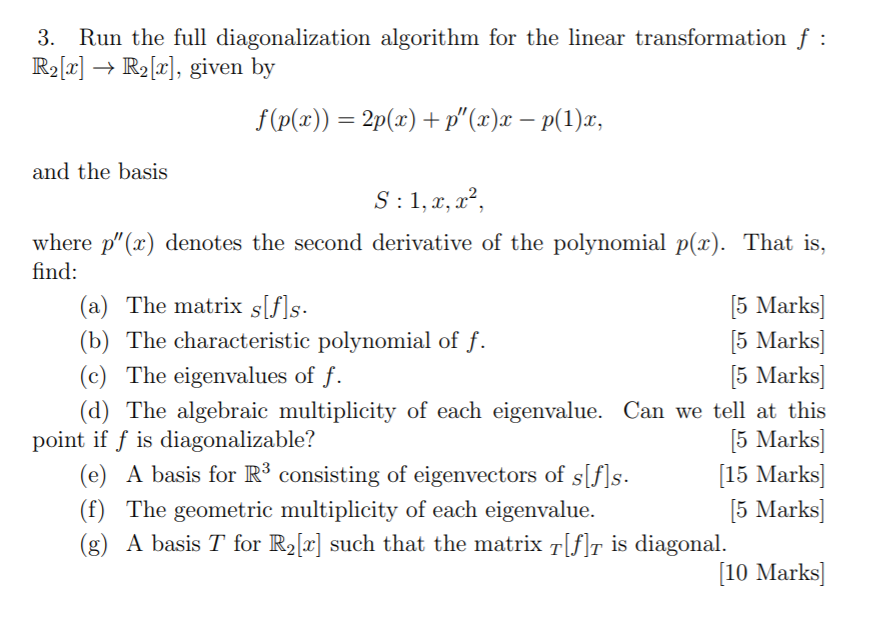
I am struggling on part g
I have managed to get all the other parts but that last part
just don't understand where to start or what quite to do
so in part (e) you found a basis of R^3 of eigenvectors for the matrix of f in the basis S
can you take that basis of R^3 and give me the corresponding elements of R_2[x]? (specifically, can you tell me what elements of R_2[x] must have those eigenvectors in R^3 as their coordinate representations in S?)
those corresponding elements will form the basis T that part (g) asks for
that sounds complicated but take a second to unpack it
@jolly roost you need to choose a value that you can't get by adding or subtracting MULTIPLES of u and v
so formally what you'd do is you'd add the two with generalized coefficients and form an equation of the form Ax = b where A is a matrix of coefficients and b is your proposed solution, and then you'd row reduce and show that this system of equations has no solutions
does anyone have a link to some proofs of the properties of determinants?
like the basic properties and also the proof that the determinant gives you the area of the parallelopiped in n-dimensions
most of the properties of the determinant can be derived from the procedure of calculating it via row reduction
the wikipedia page has a good overview of them
i see
how do you calculate it by row reduction? You mean the product of the diagonals thing?
basically, you know that the determinant of an upper triangular matrix is just the product of the diagonal elements
and the row operations affect the determinant differently:
scaling a row by c scales the determinant by c
interchanging rows scales the determinant by -1
adding a scalar multiple of a row to a different one does not affect the determinant
I see
But i thought the determinant was defined in terms of adjoints and laplacian expansions
that's not really a "good" definition of determinant
it's more of a consequence from how determinant should be defined
i see
i do agree, laplacian expansions are a pain
but how are they defined then?
or how is it defined*
the R^n x R^n -> R function that is multilinear and alternating in the rows, and that maps the identity to 1
it's defined by its properties
and you derive the rest from the properties
I see but the properties seem to be too good to be true in a sense, so I'd expect to see a proof for it
and it doesn't provide good intuition, does it? Maybe I haven't studied enough about this for it to be intuitive but still
I mean there's no proof for it lol
that's literally the definition
or at least, a definition
you can't prove the definition, it's just how it's defined
but, in certain lin alg courses, you would be able to see everything you'd normally think of determinants is implied by those two properties, along with the requirement that det(I) = 1
proofs of deriving stuff like the expansion formulae etc could probably also be found online
im sorry im tired af so don't exactly know what im saying lol
idk quadratic forms, someone else will come along and help
oh wow that's good thank you
ill look into it
damn someone wrote all of this by hand
probably is a professors notes
id hope so
i slightly rewrote a teacher's old notes
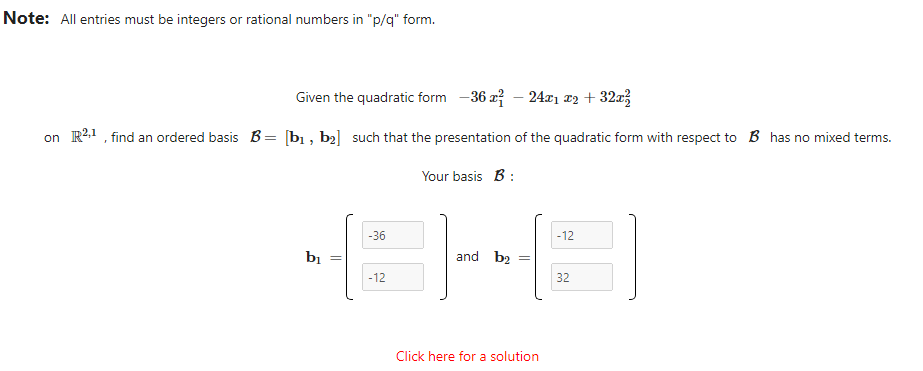
can someone teach me how Diagonalizing a quadratic form works?
i understood my notes, but when i actually do it, i think i might be misunderstanding the question
you basically write the quadratic form as x^T A x
then diagonalize A which gives you your change of basis matrix
Thank you!!
If A and B are symmetric square matricies and AB is diagonal, how do I show AB=BA ?
hm
@nocturne jewel (AB)^T = B^TA^T
do you know how to show A and B commute now?
Yeah
The previous part of the question was if AB is symmetric and I did that fine lol @wintry steppe
I just found this cool playlist of lectures based around Axler's LADR 3rd edition. I've seen 2nd edition lectures floating around, but this is the first time I've seen lectures for 3rd edition.
The channel is less than a year old. The videos are even younger. These come from a California State School, Cal Poly SLO.
I hope it may be of use to others going through LADR.
https://www.youtube.com/playlist?list=PLBUiHiRFQhsI--yc2PoCcK17fUR_mNJNH

YouTube
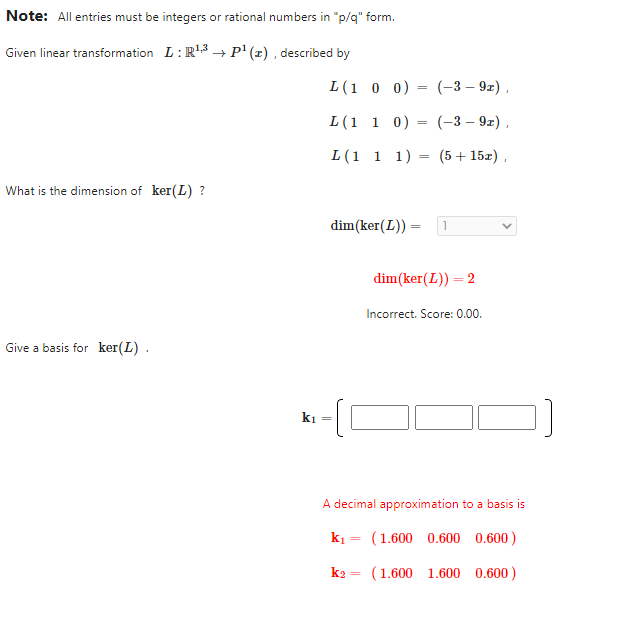
why was the range =2 here? what is determining the range?
Is there such things as eigenvalues/vectors for nonsquare matrices?
good luck making sense of Av = lambda v when one side is a different size than the other
look into singular values, maybe
they aren't a generalization afaik, but they are very closely related to eigenvalues
{kind=link}
{kind=link}
write L as a matrix and do something with that
hm can i have another hint please
you know how L acts on the vectors (1,0,0), (1,1,0), and (1,1,1), which constitute a basis of R^3. this allows you to write L as a matrix relative to this basis, and, say, the basis 1, x of P^1(x)
or you can just write L(x,y,z) = 0 and solve 
{a, b, c} is just a set of three vectors. You should probably know what span is at this point. But if you need to learn it, you could try this video. https://www.youtube.com/watch?v=k7RM-ot2NWY
Home page: https://www.3blue1brown.com/
The fundamental vector concepts of span, linear combinations, linear dependence, and bases all center on one surprisingly important operation: Scaling several vectors and adding them together.
Full series: http://3b1b.co/eola
Future se...
Ive seen that video i love 3blue1brown
Im just not sure what method id use to find 2 3 or 4
1 i know its linear combinations so i did that easy
no, I think you're pretty confused
ouch
is the answer for 2 3 vectors
and im just overcomplicating it
because its not span in that question
let's go back to 1. when it asks you if w is in {v1, v2, v3}
yea
it's asking if w is literally one of those three
has nothing to do with linear combinations
that comes in when span is involved
i thought it meant that the vectors v1, v2, and v3 are able to get vector W when multiplied by scalars and added together
no that's asking if w is in span { v1 v2 v3}
so the key thing here is to understand the difference between a list of vectors and the span of that list
my understanding of span is that its the space that a set of vectors can reach when multiplied by a scalar and added together
yeah
ok so how do i determine the number of vectors in the span{v1, v2, v3}
is that where RREF comes in?
if the matrix has infinte solutions then the answer for 3 would be infinite? hypothetically
let's take a simple example. Span{v1} includes for example 0, 0.0001v1, .00002v1, and so on and everything in between
it's the number of points on a line, which is
infinite
yeah
same is true when you have multiple vectors
span of anything (besides the zero vector) is going to be infinite
yw
Wait where’s the part of the server for people who have a hard time with division??
My duel digit iq can’t handle all this

@junior panther #prealg-and-algebra or any of the questions channels
do you still need help?
What are the best sources to study Linear algebra? I was using khan academy but he doesn't have any practices beyond vectors
a decent textbook should serve you well
strang
roman
fucking kek
strang i don't know about, but roman is way too advanced for what you want, probably
i like the book by friedberg (also with two other guys, insel, spence), and the book by axler - these are theoretical LA books
I've did linear algebra course for com-sci but failed miserably.
Does anyone know how to do this? I've tried substituting some variables. I'm aware a span is regarding linear combinations and is so that all things are covered?
I've tried to do some substitutions but I feel like I'm not getting anywhere with it
exp meaning?
no you sub in z= .... into that
yeah it says that
I have tried that
and well, I just sort of like
I'm unsure what exactly I'm trying to pull out, if you get me?
what'd you get
So for me
for part A for example
I got:
lemme find it
ay + bw = cz
....
y(a-7b + 2c) + (4c)x = 0
am I going completely off the rails or am i on the right track?
that's what I got
$w= 16x + y + 4z = 16x + y + 4\underbrace{(-4x - 2y)}_z $
Timon:
now simplify that
I've noticed during my calculations, it cancels out the 16x
so you'll obtain
-7y
...
I see.
so that therefore means their spans are the same
because you can obtain the "other" span by scalar multiplication
and it's closed under scalar multiplication
correct?
well it's right that the spans are equal
so C must be correct
yes
and it's the only one?
because I made a mistake in my working out
what I did for example with part A was:
ay + bw = cz
then I expanded it out and I got some letter mess
y(a-7b + 2c) + (4c)x = 0 this basically
but I noticed you didn't use generic letters, why is that?
because I'm lazy and I didn't need to think about how to solve this problem in general. I could quickly work it out without resorting to such things, so why bother
are you meant to use generic letters or?
I assume you can use whatever method gets you the right answer
and what would be the method that ensures you know a statement is true?
because that is a bit where I'm struggling. I don't know what exactly I'm looking for?
I can tell it's something to do with span, and linear combination and covering all possibilities
well what do you think about A? since span(y) and span(w) are the same, span(y,w) = span(y) = span(w). Does that make sense to you?
part A can't be true
span(y, w) = span(y) = span(w) as shown what you have told me and the reasoning you've used (implicitly)
wait
hold on
yeah
part A is false
or rather it's not necessarily true
z relies on x and y
yeah, it could be true depending on what x is but it's not "must be true"
precisely
because the LHS is essentially the RHS, but with co-efficient of x being zero
and hence, the LHS span is more restrictive than the RHS, so therefore the spans can't be equal
B therefore also can't be necessarily true as well
due to similar reason
oh wait, it's starting to click now
wait hold on
is part B necessarily true?
span (x, (-4x-2y) ) = span(-7y)
no wait, it's not
the RHS can't get any x, but the LHS can remove the x and enlarge the y as much as it wants
I'm gonna go with C and D being necessarily true?
awesome!
I got it right!
Thank you so much! It clicked at the end and it makes sense! I can treat x as being (1, 0) and y as (0, 1) and just see how if the spans of each other can cover one another
@odd kite 
ah, yw
but I see the short cut you did
you are meant to have the generic constant variables
however, it's closer under multiplication and you can work without using it
I added them being silly, when really I should treat them as element entries
- a carpenter is buying supplies for a job. the carpenter needs 4 sheets of oak paneling and 2 sheets of shower tile board. the carpenter pays 99.62 for these supplies. for the next job the carpenter buys 12 sheets of oak paneling and 6 sheets of shower tile board and pays 298.86. he also spends 139.69 on 1 sheet of shower tile board and 8 sheets of oak paneling. how much does each item cost individually?
help ^ pls
I think this is a #precalculus question @tawdry yacht
#prealg-and-algebra seems ideal
you want me to help out?
@tawdry yacht has been answered, no need to answer
what's the issue
literally find a vector that's in both U and W
I can tell it wants me to find the intersection, and find some vector that when you multiple it, it includes all the stuff of the intersection of U and W
Yeah, I tried 0 0 0
and it was like "nah"
a nontrivial vector
right
naturally
do you know how to solve general linear systems?
and the span will be all multiple stuff
I do, but I wanna see how it manifests itself
well this is a linear system
yes
this is a linear system
I get you gotta solve it and find specific values of a, b, c and d
well
the columns of your matrix are column vectors of U and W
go on?
it's got 3 rows and 4 cols, so the kernel is at least 1-dimensional
find the fundamental solution
idk, I don't see any conceptual issues in this problem
it's just a shut up and calculate type thing
I don't get the 3 rows and 4 columns?
oh wait
I get it
wait
yeah
wait, no I don't
:/
oh wait
I think I do get it
@barren plank wait I'm still stuck
:/
with?
yes?
I can't see it :s
$\begin{pmatrix} -3 & 4 & 5 & 25 \ 3 & 8 & -1 & 1 \ -4 & -10 & 4 & 5\end{pmatrix}$
mniip:
ah right
I was working on that
and manipulating it
oh right, yeah
I put it into RREF
that gives you the solution
so do I put it into REF?
I do but I'm getting cut for time with a homework assignment
hence why my head is going fuzzy
that and I am all nighting
I got into REF
now what?
oh wait
god I have 6 minutes
and I have no clue
@barren plank
is this a test
literally just solve the linear system
I don't understand what you're having problems with
I have a question, if I were to show that a vector $\bf p = (1, -2,-3) \in\text{col} A$ where $A$ is a $3\times 3$ matrix I have to check if $A\bf x = \bf p$ but if the system has infinitely many solutions can I conclude that $p\in \col A$
homomorphism:
Compile Error! Click the reaction for details. (You may edit your message)
bad tex
but anyway, p ∈ col(A) iff Ax = p is consistent ie has at least one solution
uniqueness does not matter here
alrighty, thanks Ann
just a question, how can I check if my answer is correct?
nevermind I got it wrong
and it was (5, 1, -1)?
how is that obtained?
does this just mean all evalues are Real?
im confused about how this prop is worded
@obsidian bluff
All eigenvalues of A are real, and there's at least one.
thanks
Okay so
If I have a set of matrices, particularly these ones
And the span of this set is equal to the range of another matrix, how would one find an example of this other matrix?
The matrix would be
[0 1 1]
[-1 1 0]
[1 -1 2]
Note that the range refers to all outputs of
[0 1 1] [a]
[-1 1 0] [b]
[1 -1 2] [c]
Which, if you matrix multiply that out, is just another way of writing
[0] [1 ] [1]
a[-1] + b[1 ] + c[0]
[1 ] [-1] [2]
Which is the span you want
@prime patrol
Swapping the columns around doesn't change the range so you can make more matricies this way.
I'm sure there's other matrices you could make too, that cover the same space.
Hi. How can I tweak this to find the parabola of best fit through the points
if i have a matrix where the bottom row is all 0s and im asked for the span
is that considered the 0 matrix? and therefore the span is not infinite
I assume you are actually being asked for the span of the columns. In that case, the span is still infinite
ah ok
Can someone explain how these multipliers are found?
I dont ever remember hearing about them before, so I dont know what their relation to the pivots are
I multiplied the first row by 1/2 to get the second pivot, and I multiplied the second row by 2/3 to get the third pivot, so I can sort of see where these numbers are coming from. What I am not sure about is how we determine the order of the multipliers, and why is 0 a multiplier?
I need to have the order because I need to use them in this equation, so there are pivots that correspond to certain multipliers that have a certain place in the equation.
the multipliers are negative of the numbers you've found, because they want to write an expression like x-my, as subtraction.
i have am really lost on my whole math homework today can someone help me it is only 6 qoustions?
?
<@&286206848099549185>
is this supposed to help me?
@royal ore how do you normally show that map a map between vector spaces is linear?
Think about that first and if you've still got problems come back.
@quiet heron just post your questions instead of asking if you can be helped
either just solve the linear system and pick the right solution, or just check each one and pick the one that solves it
you know, take each pair (x, y) that you're given and see if it satisfies the two equations
ok so thats where i am confused i put the problem in y=mx+b but right after that i am lost
you don't need to do thay
you can literally just put each pair into the linear system and see if the equations are satisfied
like for (-2, 0), just plug in x = -2 and y = 0 and see if the equations hold
repeat until you found the right solution
the smarter way to do this would be to solve the system, but plug and chug works too
ohh wow thanks
(note that there's only one solution, so you don't have to worry about multiple)
This may be out of the blue, but do you know how to solve this without the multiple choice?
no if i am being farley honest
Okay, I'll walk you through it then
Sometimes you don't always have the multiple choice, so you can't always rely on it
ok
this is what i meant by just solving the system btw
Do you know the substitution method? Have you learned it yet?
no
Take a look at this
I used your question but I did it step by step
So read it and then ask me any question or anything you're confused about
shoot
7+4=11
but its zero either way
Sorry about that the 7x+4x= 11x actually
okay so since we isolated the y
you have to insert that into the 7x-4y=8
you have to put the (-x-2) in the y spot of that equation ^
to solve for x
after you insert (-x-2) you do the foil method
so it would be you basically expanding the equation
(-4)(-x)=4x and (-4)(-2)=8
so now you have 7x+4x+8=8
7x+4x=11x and you move the 8 over to the other side so it cancels out and becomes a zero
11x=0
0/11=0
so then x=0
ok
i think this isn't the right category for it though, pre-algebra would be more like it
hi, i have a question about eigenvalues and diagonalization
i have to find all eigenvalues of the transformation T: P_2(R)->P_2(R), where T(f(x))=xf(1)+(x+1)f'(x)
i could type that out in latex but i think i did all the math about it anyway here:
a) is what i wrote right? and b) doesn't this mean the set of eigenvectors is linearly dependent, meaning it cannot be diagonalized?
The logic is good. However, 0 is never an eigenvalue by definition.
oh whoops, that might be a mistype
i think the eigenvalue was supposed to be 1 there
Because T is a finite dimensional linear operator, you can write it as a matrix. Consider f(x) = ax² + bx + c. Then:
Tf = x(a + b + c) + (x + 1)(2ax + b)
Tf = ax + bx + cx + 2ax² + bx + 2ax + b
Tf = 2ax² + (3a + 2b + c)x + b
So the coefficients are given by a matrix multiplication:
[2 0 0]
[3 2 1]
[0 1 0]
Describing T
,w {{2,0,0},{3,2,1},{0,1,0}}
yeah this format makes a lot more sense
ok i should have been doing it this way from the start
I'm trying to learn 3D rotations. I feel like I understand these rotation matrices, are they not just like Given's rotations?
Anyways, I'm wondering why the negative sign is moved across the diagonal in the second rotation matrix, the Y axis rotation.
Does this have something to do with the system being left-handed?
if that sign wasn't moved then I feel like everything would make sense
In the first one, $R_z$ the positive sin term is "to the right" of z, ie, applied to the x column.
Apopheniac:
So for the matrix $R_y$, the column to the right of y gets the positive sin term.
Apopheniac:
Thank you for the response, but I don't understand that explanation 🤔
if you construct each matrix yourself visualising the rotation you will understand what is happening. Of course you only need to do this once and you will get it
a very brute way, but this is how I first understood it. There may be better ways
This is good to read too https://en.wikipedia.org/wiki/Rotation_matrix
In linear algebra, a rotation matrix is a transformation matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix
R
=
[
...
hi, it's me again
i need to come up with a proof for $c_A(x) = x^n - \tr(A) x^{n - 1} + \ldots + (-1)^n \det(A)$
Snodlop:
where c_A(x) is the characteristic polynomial
i have an example for 2x2 matrices, but i'm not sure how to expand it to nxn
ok thanks, i'll let you know if there are any problems with that
i'm supposed to make it so that both sides are the same
(2k+1)(k-1)+4(k+1)-3 = (2(k+1)+1)((k+1)-1)
@ivory knot wrong channel, see pins
thanks viburnum, your tip helped a ton
I don't know where to ask this, but, if you take a square matrix as an oriented and ordered collection of vectors of some kind (like some kind of collection that corresponds to a volume form,) is there any geometric identification for the way the two "forms"/collections of vectors are being combined?
I don't understand what you are asking
nvm brain failed
2-vectors correspond to anti-symmetric matrices
this is the combination of two vectors by the exterior product
sorry I'm tired
the combination of N vectors of N dimensions is a generalized volume
My question was incompetent and probably for the same reason
I'm thinking of a context where each matrix is just treated as an ordered set of vectors regarded at the same time as a geometric entity
What it geometrically means to multiply the matrices - what we can say in intuitive terms about what happens to the ordered sets of vectors
@odd kite
has no meaning afaik
well
other than it applies a linear transformation to each of the vectors
so essentially skews,scales, rotates, or flips whatever the matrix represents
I guess
sorry I'm really not 100% right now due to tiredness
When u apply kirchoffs current law and get a 7x7 matrix in the form of Ax = (2,1,5,3,3,4,1) and you end up having a free variable after 30 minutes of row operation 🔪💀🔪💀🔪💀
Seems like a bad way to do the question
Is the gradient the same thing as the slope? I'm reading up on material on this introductory course on machine learning and my book states the following, which i have trouble understanding:
It's about linear regression and the formula for a linear equation is y = mx + b, no?
where m is the slope, right? So is w in this case the slope or gradient as the author calls it?
He goes on to mention this:
To me it seems like $w_0 = b \quad w_1 = m$. I just want someone to confirm that I have understood this correctly.
As b is the y-intercept and m is the slope in the classic linear equation mentioned above
Resident Tracksuit Advisor:
I don't understand this. It just seems like another way of writing y = mx+b
why is this considered a better model than the classic linear equation written above?
I don't understand this. It just seems like another way of writing y = mx+b
it is
the author should go on to extend this principle to higher dimensions tho
But why not just write m_0, m_1, m_2 then
Maybe I'm asking too many questions. I should read further, he'll probably answer it.
you're not "asking too many questions" you're just trying to get too far ahead rn
the author starts with simple stuff as a base to progress on to more complicated models
Guys if all leading principal minors of a symmetric matrix are 0, what will be the definiteness?