#linear-algebra
2 messages · Page 141 of 1
he means that if you peak any two random vectors and put them in the matrix then they are linearly independent iff det isnt 0
then you know that the whole thing cant be
but by doing that youre not guaranteed the right answer, unless you do it twice
but that just seems more involved
yea
also some might be and some might not
you just get lucky with this one
But, why not?
cause its not fast, requires calculating determinants lol
$\begin{bmatrix} 1 & 2 & 1 & 1 \ 2 & 4 & 3 & 4 \end{bmatrix}$
jan Niku:
Oh yep but it is 2x2
It is kinda fast
is checking a determinant faster than checking rank
is it faster than saying 3 vectors cant be independent in r2?
No of course not hahaha
I hate determinants tbh
lol
But I guess he had to provide another answer hahaha
like integrals and shiet only
Determinants are amazing
I love them and I dont know what the hell they are
laplace 
laplace is
determinants are dumb
@robust pond CRINGE
I remember this one problem in my lin alg exam when I was only one of the few who got it correct, it was this very tricky laplace usage
idk they didnt seem really useful to me @brisk fractal
I like laplace since then
other than showing up in the formula of an inverse
which is just like
factoring out a common factor anyways
LA is better if its pure, calculus is better if you mean analysis
Well, have you seen vectors in R3 right ?
hahahaha
$\mathcal L$
jan Niku:
thats not it 🤔
BRUH do you mean laplace transform?
yea 
I meant laplace way to calculate determinants
any determinant you wish with that

,w laplace expansion

That definition is amazing
looks scary but very ez
I love how that is written
ive never learned laplace transforms and I wish I could write this L @robust pond
That L is pretty sexy
so are you
jan Niku:
$F(s)=\L\brc f(s)$
RokettoJanpu:
wrong L 🤔
$F=\mathscr L\brc f$
RokettoJanpu:
wrong L 
but an L nonetheless
wait godel what the hell is a laplace determinant
i got sidetracked
wrong laplace
laplace expansion for finding det involves computing dets of smaller matrices (minors of the original matrix) as you iterate over a chosen row/col
Basic stuff but right handedness depends on order?
For example if i,j,k are righthanded
j,I,k is left handed?
cyclic permutations conserve handedness?
<@&286206848099549185>
@quartz compass just to clarify then, when texts say “the right handed set a,b,c” they mean the ORDERED set ...? Thanks :)
can someone walk me through how they simplified in step 2?
i keep getting \begin{pmatrix}1+m^2&0\ 0&-m^2-1\end{pmatrix} when I multiply, I'm not sure how they got there
strawberrypocky:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
i'm not sure what you're doing - it seems you're using rows for both matrices?
should be using rows of the first, columns of the second
for example, for the top-right entry (the green image)
it's in the first row, second column
so we expand on the first row of the first matrix (1 m), and the second column of the second (m 1)
1 * m + m * 1 = m + m = 2m
hence the top-right entry (green) is 2m
a similar process holds for all 4 positions
the bottom-right for example
it's in the 2nd row and 2nd column of the product (bottom) matrix
so we expand on the 2nd row of the first matrix, and 2nd column of the second
m * m + (-1) * 1 = m^2 - 1
wait give me a moment to read through it haha, thank you!!!
OH
I DON'T KNOW WHAT I WAS DOING EITHER
thank you so much
in the future, visualizing like this can be helpful
also, in case you're wondering about the 1/(1+m^2):
scalar-matrix multiplication commutes
oh nah i got that part, thank you so much
so we can just swap around the first matrix with the 1/(1+m^2)
and be fine
(but of course, we can't do this with two matrices)
Hey, I am writing a paper on linear algebra at a high school level, can anyone here read through a few pages (less than 5 minutes would be 👌 ) and give me some feedback?? Thanks!
Sure
@grizzled folio I'd like to see it too
Just post it here
Ok, I'd rather DM both of you
Suppose there is a x,such that x is not an eigenvector of T, Then Tx and x are linearly independent(Making V a T cyclic subspace)
If not,Then all vectors in the space will be eigen vectors of T,implying T=cI
Not sure if I follow
Just take 2 cases:There is a vector,which is not eigen and There are no such vectors
if its not an eigenvector, then Tx, x are lin indep, but how does it show that T is a cyclic subspace?
*V
oh wait
hi, idk if this is suppose to be trival,
Suppose S is a subspace for R(nxn) has a basis {b1 , b2 ,... br},
Denote B = [b1 b2 ... br], rank(B) = r
For any W in R(rxr) , denote BW = U = [u1 u2 ... ur]
If W is non-singular, then {u1, u2,..., ur} also form a basis for subspace S.
Can someone enlightened me?
Can someone solve this?
Pretty sure that's #prealg-and-algebra
@solid bough In case you still need help with your question: this is a case where it helps to think of matrix multiplication in terms of "column perspective"
$$\begin{bmatrix}\mid&\mid\c_1&c_2\\mid &\mid\end{bmatrix}\begin{bmatrix}x_1\x_2\end{bmatrix}=
x_1\begin{bmatrix}\mid\c_1\\mid \end{bmatrix}+x_2\begin{bmatrix}\mid\c_2\\mid\end{bmatrix}$$
nix:
this happens in all matrix multiplication for each individual column. so the columns of a matrix product AB are a linear combination of the columns of A (similarly the rows of AB are a linear combination of the rows of B which is "row perspective")
so the columns of BW are a linear combination of the columns of B, which means that the columns of BW are in the span of your basis B
if W is nonsingular then its a linear combination which leaves the columns linearly independent
since the span is the same and they are linearly independent, its just as valid a basis as the columns of B
does anyone know what the qu means by working over Z3 and Z5? do we simply have to convert each entry to Z3 or Z5 at each stage?
<@&286206848099549185>
basically yes
it implies that e.g. 3 or 6 wouldn't be invertible when working in Z_3
since they're zero
so if say i multiply the second row with 2 in z3 will i get ( 2 1 1 1 0 ) ?
yeah
so at each stage i just change numbers to z3 or z5 right?
yes
ok ty!
Hey, as I said before, I am writing a paper on linear algebra at a high school level, can anyone here read through a few pages (less than 5 minutes would be 👌 ) and give me some feedback?? Thanks!
Sure post it
Can anyone else here look through this report?? 👆
I might check it out in my free time
Could somebody help me out with this?
I understand how I would solve it if it was just: y = au + Bv
but how do I solve it given the added y variable
Have you tried appending a column full of 1's to match with the gamma coefficient?
i tried working through this but im not sure where i went wrong
@glass meteor www.math.odu.edu/~bogacki/cgi-bin/lat.cgi
@solid bough In case you still need help with your question: this is a case where it helps to think of matrix multiplication in terms of "column perspective"
@hollow finch Thank you for the explanation, i think it becomes clearly when i view it as a linear combination. Just to clarify, if column vectors in B form a basis subspace S , then BW is still a basis for subspace S. Would this be viewed as a change of basis?
Typically we use change of basis for a basis of a vector space, but in the sense that we are changing a basis for a subspace i think that's appropriate. Not 100% sure but I think as long as W is invertible then coordinate vectors should stay unique and consistent
Even then I don't think I've considered coordinate vectors for a lower dimensional subspace. I feel like it should work though
Hey there. Is it true that the row operations are just multiplying by matrices/vectors without writing the entire thing?
I don't know how you multiply with vectors
But, yea you could see matrix multiplication as doing row operations
Look up elementary matrices
You can define the adjoint operator of a general linear operator over a (potentially infinite dimensional) complex vector space
So let $V$ be a complex inner space, $T$ be a linear operator on $V$, let $T^*$ be the adjoint of $T$. Then for each $v\in V$, $T^*v$ is the unique vector such that $\brk{Tv,v}=\brk{v,T^*v}$
Whoever:
So basically the adjoint operator satisfy $\brk{Tv,v}=\brk{v,T^*v}$ for all $v\in V$
Whoever:
If V happens to be finite dimensional, then you can find an orthonormal basis (it HAS to be an orthonormal basis) and you realize that the matrix of T* is the conjugate transpose of the matrix of T
@oblique rune
Hopefully that helps
What is an inner space?
Transpose of the cofactor matrix is also called adjoint
And what does ⟨Tv, v⟩ mean
Yes that's how I was taught
And I was told that it's used for finding inverses
And that was it

Ikr
Um
Well
Here’s the definition of inner product, and an inner product space is a vector space with an inner product
But I suggest you to read axler chapter 6,7
Oh I have a PDF of that book
They talk about inner product and adjoint operator
Ok
Ok, I'll check it out and ask doubts if I have any, bye
Oh trueee
@oblique rune yeah I think you meant a different adjoint matrix
I’m sorry
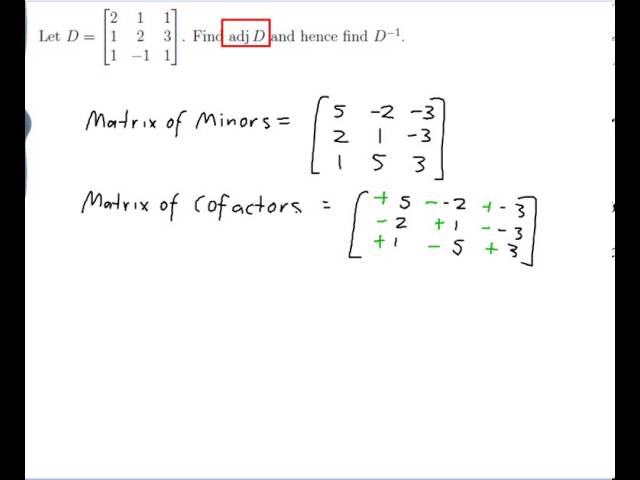
Worked example by David Butler. Features finding the adjoint of a matrix and then using this to find the inverse.
does this means infinite solutions?
Yes @rose umbra
there is 1 free variable
which you can choose to be any value
so infinite solutions
@honest token is it always the case with free variable?
and when I dont have free variable, is it always single answer?
unless i have contradiction(?)
If the system is consistent then you have a unique solution
If you have a contradiction you have 0 solutions
unique solution = one solution?
yes
thanks a lot !
welcome!
It is enough to define an inner product on a finite-dimensional real space by specifying an orthogonal basis for the space, correct?
Yes
I mean,same for complex spaces too
im having a hard time answering t/f questions like these, can someone guide me through the thought process of figuring this out? I've gone as far as identifying the set as an Ax = 0 equation to further help, but not sure if thats something i should be doing. that would make A 6x4
and it can have 4 pivots at most
but how does any of that help me
Do you know what a basis is.
I get very confused about lattice in linear algebra, can someone help me understand what is it?
@honest imp
Consider
(1,0,0,0,0,0)
(0,1,0,0,0,0)
But 4 of those
You seem to be eager to think of a matrix, but linear independence has nothing to do with matricies right away
@half ice ty for the response!, this was one of the conclusions i came to when thinking about this problem. 4 of the vectors can be e1-e4 which are basis and are lin. independent
Glad you got it!
Wait no e1-e4 is not a basis for R⁶
But they are linearly independent yes
Details aside, that works as an answer to this question
i have one more question if you dont mind helping while youre here :o
Go for it!
for these types of questions, idk if its because i have a hard time visualizing it, but what would i be looking for when doing this problem?
think about the concepts of dimension and span
Do you know what dimension is?
yes, im relatively new to the concept though
I'll bring this down to a lower dimension to really discuss the concept. The span of two vectors can be, at most, a plane
You can never get any 3D space by using the span of two vectors. That make sense?
ya
R³ has dimension 3. That means,
- You need 3 vectors in order to span it
- More than three vectors "won't have enough room" and will be forced to be linearly dependent
that makes sense too
R⁶ is the same game. Has dimension 6, you need at least 6 vectors in order to span it
So the question you posted above is false, 4 can't do it
that seems a lot simpler than what i was thinking in my head  maybe its because i was over thinking it
maybe its because i was over thinking it
if i had 4 vectors, they would be able to span r3 then but one of those vectors will become linearly dependent of the other?
yes, exactly

@oblique rune yeah I think you meant a different adjoint matrix
@pallid rampart
Ohh yes I didn't specify that
Why is the inner product over a vector field of polynomials written like this?
I'm guessing it has something to do with how integral can be thought of as infinite summations of p(x)q(x)* but I don't know.
there is no the inner product
oH yes
that is only one inner product
My bad
But you can just check the axioms
If this function (a function that assigns two vector to a scalar) satisfy all the axioms of an inner product then it is an inner product
That integral
well that's the definition
that's the definition of one example of an inner product
Hmm ok, so since it returns a scalar, it's an inner product. But why is the integral evaluated from 0 to 1? Why can't it be something like 0 to 2
well it's just an example
but you are right
the integral from 0 to 2 also defines an inner product
in fact the integral from a to b for any a≤b defines an inner product
But wouldn't the value change
right
so that's why this is only one example of an inner product
there are many many inner products
i mean yeah of course
by definition the same inner product means they produce the same value on every pair of vectors
therefore different inner product must give different values
that is what it means for two functions to be different
because afterall, inner products are just functions
Hmm I see
is $mat^{-1}$ the inverse matrice ?
Cewein:
No it's the inverse of t multiplied by ma on the left
nevermind I figured it out
@wintry steppe I am currently writing a paper on linear algebra, would you be willing to give me some feedback??
Hello! I have to show <u+v, w> = <u,w> + <v,w> for any u,v,w ∈ ℝ²
Let u = (u1,u2) et cetera
Compute <u+v, w>
And compute <u,w> + <v,w>
Each computation should come out to the same thing, proving the claim
@royal ore
but isn't <> an inner product? isn't that true by defn?
yeah just needed to prove it but figured it out
now how would i show that <v,v> = 0 if and only if v = 0
Nah it's likely the dot product here
Same idea, evaluate <v,v> for v = (v1,v2) @royal ore
what would <v,v> be evaluated as to show it's 0
What do you get for <v,v>? Lol
wouldn't it be v1v1+v2v2
Exactly, or v1² + v2²
Because of the way squares work, this is always 0 or positive
So that means this is only ever 0 if v1² = v2² = 0
Which is just v1 = v2 = 0
Ergo <v,v> = 0 iff v = 0
thank you
now I have a question that involves matrix multiplication
i got the product of B * Z
but now how does 3rd row of it get written as a linear combination of rows of Z
there's 4 for the 3rd row but 3 rows in Z
These are steps that you take in the multiplication
For example, in order to get that bottom left 3, you did
1(0) + 2(3) + 3(-1)
Note that the numbers I put in parentheses are the first digit of each of the rows of Z
And indeed:
1(0,1,-1,2) + 2(3,0,2,-1) + 3(-1,1,1,4)
Gives the bottom row of BZ
That's just doing multiple of your calculations at one time
so just do 3(0) + 3(1) + 3(-1) + 3(2) ...
and then replace 3 with 4 for next row
or no
because it only does 3,4 and 6
anyone know how to finish?
$\begin{bmatrix} 0 & 1 & -1 & 2 \ 3 & 0 & 2 & -1 \ -1 & 1 & 1 & 4 \ \end{bmatrix}$
DrifAssault:
@royal ore good?
yeah that’s Z, but now how do I do a linear combination of 3 4 6 12 with it
<@&286206848099549185>
I've been trying to reduce this matrix, and find the conditions to make it consistent:
$$\begin{pmatrix}1&-3&a\ :1&-2&b\ :1&1&c\ :1&-4&d\ :1&5&e\end{pmatrix}$$
ryаn:
Symbolab and others use some wacky technique to remove several columns
Anyone know what the heck they just did?
Oh nvm..
You can multiply by any constant, so I guess that's fair game.
Though, this feels a lot like multiplying with zero? How does this help find conditions for consistency?
@wintry steppe the equation is consistent iff all the rows containing 0s (except the last term) have a last term that is 0
so the rightmost column needs to have 0s in its 3rd and 5th rows to be consistent
Right, though I'm slightly confused with what they did with multiplying R3 with some insane constant?
I've never seen this trick before, is there a name for it?
Gauss-Jordan elimination
Row operations
or row reduction
Well sure, it's row reduction, but I've only seen it with normal constants.
why should it be any different?
I guess not, but I'd personally not sure how I'd come up with such an expression.
Is it multiplying by a conjugate or something?
Oh nvm, yeah I see they're multiplying and subtracting with some conjugate.
yes
Right, I think I have a better grasp, thanks!
welcome
In a given vector space there can be n number of basis vectors right?
Huh?
I just meant to ask how many basis vectors are possible in a given vector space?
how many elements can a set have?
R^n can always have n basis vectors. So you can have any number of basis vectors.
i went through all the questions but then i realized that in order to continue on to b-e i would have to complete a) at least which i dont understand at all
i dont get how you would use the quadratic equation
to find a and b
you can even turn any set into the basis of a vector space
meaning i would have to use a cartesian plane for x, y and z?
or would that be unrelated
my remark was to the previous discussion
ah mb mb
alright so i completed a-c now but now idk how you would graph positive values on that certain function
hey does anyone here know anything about the rhombic tilings of spheres
theres two infinite families that im trying to find
im writing a paper about it
any resources or anything helps
In a right-angled triangle, one catheter is three times as long as the other. The hypotenuse is
4.0 m longer than the longest catheter. Calculate the circumference of the triangle. Round your answer to tens
meter.
Can i get som healp hear
sory for bad english
can someone help me out with this
prety ezzy math i know, but a friend recomended me to send here
i dont really understand how we get that part
@dusky kayak try doing pythagorean theorem and you get an equation from that with negative and positive length of each triangle leg. From there just add everything up. Just my idea though
equation looks like this i believe
16 + 12x + 9x^2 = x^2 + 9x^2
I'm not sure my question belonged to multivar-calc-and-diffeq, so i posted there... might be linear algebra too though
"Let H = {x \in R, x_1 + x_2 + x_3 + x_4 = 0} be a hyperplane and T: R^4 -> R^4 be a reflection on H. Find all eigenvalues and eigenvectors of H. Is T diagonizable?"
How tf do I solve this?
I've never encountered a problem like this before and it just showed up on my exam...
eigenvalues and eigenvectors are foudn on matrices
eigenvector would be a matrix with n rows 1 column
and eigenvalue is 1 value in that row
So failure is already a fact but I'm curious how to solve it
honestly dont remember how you find eigen~val/vectors. If i were you i would have just swapped the values around in the matrix seeing as its a reflection the values would be the same just in different positions
so X axis would have the value of another axis etc lol
@severe cedar you can solve the problem without knowing the matrix for T, i think
the eigenvectors are the vectors unchanged in direction and the eigenvalues are the factor they change magnitude by
so for the eigenvalue of 1: you can get 3 eigen vectors that span the plane
and the eigenvalue of -1: you can use the normal to the plane
because T has 4 eigenvectors, it is diagonalisable I think
Thanks. Then I might have gotten something right on that question at least
I'm not completely sure but that would get some marks
I "guessed" that I would get eigenvalue 1 of multiplicity 3 and -1 of multi 1 on the assumption it was a Householder reflection
say i have the eigenvalues and the eigenvectors for a nxn matrix is there a way to get the original matrix?
whats the matrix rank?
the amount of linearly independent rows/cols
say i have the eigenvalues and the eigenvectors for a nxn matrix is there a way to get the original matrix?
@olive atlas
Given some n x n matrix A you can write it as A = BDB^-1 where D is a diagonal matrix with the eigenvalues diag(λ_1,λ_2...) and B is a matrix with the eigenvectors as columns, and B^-1 it's inverse. Be careful to match the eigenvectors and eigenvalues in the matrices. That is, if you have λ_1 in the first column of D, you should have the eigenvector corresponding to λ_1 in the first column of B etc.
This obviously requires the eigenvectors to be linearly independent, otherwise you won't be able to define the inverse of B.
also how do i determine the order for the eigenvalues i get from the roots of the characetestic polynomial like if i have a 3x3 matrix and i get -3,-2,-1 as the values how do i know which is value1, value2 and value3?
nvm order doesnt matter as long as the order of the eigenvectors matches the order of the corresponding eigenvalues
what a weird username
@gilded solstice do you have a formula for inverse
you can just do this directly
you could also look at like A^2 = I and check the spectrum

this was on my linalg hw and I was able to prove that a second order homogenuous equation has at least two solutions by cases but generalizing to nth order... i have no clue
is there any hint to what direction i could go in?
since it seems that if i just try to prove it the same way i did before it would be impossible to account for every time a repeated root comes up
might want to try #multivariable-calculus , although ig it works in both
yeah idk where to put but i was hoping maybe the explanation would be more linalg-y if i put it in here
😔
I'm doing Linear programming and I'm trying to understand this task. I have been looking all over my textbooks, but I can't find the definitions for these letters... Anyone that can help me out here?
can someone help me
with a math queston please
im willing to donate
im having troble with tis hw problemcan someone please help me
if someone can please help me i dont mind making a donation
its
im double checking
he's [checking]_2
maybe you should think before you post
whats R_n
means sunset
subset of what, and isomorphisms of what?
yes
Pixie join the voice call
how?
Scroll down, it’s “mathematics” in the server
where it says math voice?
Yeah
$\mathbb R^3$?
Saccharine:
is that what you mean
$R_2$
JohnDS:
$\mathbb R$
Saccharine:
I vaguely remember a my linear algebra class using $\bR_n$ to mean rows
kxrider:
pretty dumb ik lol
,rotate
@wary moss
It's not really an interesting question oop. Basically, given a linearly independent f and g, there's nothing preventing af + bg from being a solution
It is much more interesting to note that af + bg + ch could never be a solution
right sure but what about for nth order diffeq?
$\mathbb{Z}$
JohnDS:
A diffeq of order n has n linearly independent solutions. Perhaps they don't want a proof of this.
i hope not
but i feel like they do 😔
my classmates say that's what it is asking though
From the sounds of it, they didn't do the first part well enough to generalize oop
Can somebody plz help me with this?
Write it as an augmented matrix and perform row operations until you have the column with entries 1 0 0.
So if you do a matrix multiplication but only fill out the bottom row of BZ, you'll do
1(0,1,-1,2) + 2(3,0,2,1) + 3(-1,1,1,4)
In order to find it
Giving the third row of BZ as a linear combination of the rows of Z
ohhhh
i was doing it really different
thanks
i thought the 3rd row of B*Z had to be used
there are a lot of ways to interpret this
you have shown that any vector of the form u = [blah, blah, z], where z is nonzero does not have a vector v such that Av = u, so therefore A is not surjective. Trying to find the inverse matrix will fail when you attempt to invert the basis vector [0, 0, 1], by the previous part. If A is not surjective, then the inverse cannot be defined for the elements which A does not hit.
can anyone help me with a least squares parabola question?
how do i do this
i don't understand where i'm going wrong
well, L doesn't have ones on the diagonal
it has a 2 right there
what technique (if any) have you been taught to find LU decompositions? gaussian elimination?
i have a question about a linear algebra problem that i'm doing, but it's more about writing up the latex than the actual problem, if that's ok
i'm solving an augmented matrix, and i have this block of code to express it:
$$\left[\begin{array}{cc|c}{4 & 1 & 0 \ -3 & -1 & 0}\end{array}\right]\to\left[\begin{array}{cc|c}{4 & 1 & 0 \ 1 & 0 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \ 4 & 1 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \ 0 & 1 & 0}\end{array}\right]$$
Snodlop:
$$\left[\begin{array}{cc|c}{4 & 1 & 0 \\ -3 & -1 & 0}\end{array}\right]\to\left[\begin{array}{cc|c}{4 & 1 & 0 \\ 1 & 0 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \\ 4 & 1 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \\ 0 & 1 & 0}\end{array}\right]$$
```Compile error! Output:
! Missing } inserted.
<inserted text>
}
l.54 $$\left[\begin{array}{cc|c}{4 &
1 & 0 \ -3 & -1 & 0}\end{array}\right]...
I've put in what seems to be necessary to fix
the current column of the current alignment.
Try to go on, since this might almost work.
texit gives the same error that my other latex editor gave, but i don't know how to fix it
here's the text again so you can see what it looks like
$$\left[\begin{array}{cc|c}{4 & 1 & 0 \ -3 & -1 & 0}\end{array}\right]\to\left[\begin{array}{cc|c}{4 & 1 & 0 \ 1 & 0 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \ 4 & 1 & 0}\end{array}\right]\to \left[\begin{array}{cc|c}{1 & 0 & 0 \ 0 & 1 & 0}\end{array}\right]$$
Snodlop:
Compile Error! Click the reaction for details. (You may edit your message)
if this is the wrong place to ask a question like this, i'm sorry but i don't know where else to ask
uh
the contents of your arrays dont need to be wrapped in {}s
its an environment like any other
the \begin{array}{cc|c} and \end{array} suffice as a wrapping
$$
\left[
\begin{array}{cc|c}4 & 1 & 0 \\-3 &-1 & 0\end{array}
\right]\to \left[
\begin{array}{cc|c}4 & 1 & 0 \\ 1 & 0 & 0\end{array}
\right]\to \left[
\begin{array}{cc|c}1 & 0 & 0 \\ 4 & 1 & 0\end{array}
\right]\to \left[
\begin{array}{cc|c}1 & 0 & 0 \\ 0 & 1 & 0\end{array}
\right]
$$```Namington:
oh that's absolutely perfect
thank you so much
this one error was driving me crazy and i had no clue what i did wrong
to clarify what was going on
normally you can insert {}s randomly in latex and itll kind of ignore them
the problem is that
because youre separating the entries of your array using &s and/or \\s
you're putting a { in one entry, and a } in the other entry
this confuses latex
since its expecting the { to be completed in the same entry (LaTeX is not very good at looking ahead)
so it tries to insert the "missing" } at the end of the entry with the {, and gives an error
the solution, as shown above, is just to remove the useless {}s that are confusing latex.
ok that makes sense
i didn't realize that array was its own environment, i thought i still had to wrap the insides in braces
everything within \begin \ends is an environment
Given a linear operator on C^3, T(z_1,z_2,z_3) = (2z_2 + iz_3, iz_2, z_1), how would you going about finding the adjoint of this operator? Would you produce a matrix using the standard basis and find the conjugate transpose? Or is it possible to find the adjoint using <T(z),y> = <z,T^*(y)>
The standard basis might not be orthonormal. Preferred method would be to convert to a orthonomal basis and take conjugate transpose
Sure,You can find the adjoint with that definition
(The adjoint being conjugate transpose of matrix of T in an orthonormal basis is based on that)
@severe cedar
With which definition, the last one?
Yes
Thanks. I hope I got it right then.
What confused me too is that the standard inner product of C uses the conjugate of the second factor. So I'm not sure if the adjoint "removes" the conjugate in <z,T^*(y)>.
Do you know how you get the representation matrix is conjugate transpose ?
sorry what
Do I know how to find the conjugate transpose of a representation matrix? Yes
and yeah the conjugate transpose matrix uses the conjugate so i guess that does it
No,I am asking whether you know why taking conjugate transpose of a matrix representation of T gives you the matrix representation of T*?
hmm i'm not totally sure
Let ($e_1,e_2...,e_n$) be an orthonormal basis .Do you know if $Te_1=c_1e_1+c_2e_2...c_ne_n \implies \langle Te_1 \mid ej \rangle=c_j$
DrunkenDrake:
to solve a system of linear equations by EROs do i need to have the matrix completely reduced i.e.
[1 0 0] [1 a b ]
[0 1 0] or can it be [0 1 c ]
[0 0 1] [0 0 1 ]
in my lectures it was always completely reduced but looking at some other revision materials it shows this
does having it completely reduced just make it easier?
Yes
okay so are either able to solve a system of linear equations
Man I wanna understand why gaussian elimination actually works but i gotta catch up on a lot of stuff and i've no time
@reef ridge for gaussian elimination you have to put it in "row echelon form" which looks for a system of 3 eq-ns looks like this
I understand what it is, i'm more wondering why elementary row operations and stuff to get there actually solve linear equations
if that makes sense
okay the way I imagine it
is that each row is a variable
you're able to solve linear eq-ns because
you effectively get a solution for 3rd variable in the bottom row
z=constant
and this immediately allows you to solve the rest of the matrix as the rest is:
y+z=constant
but we already know z=const
right
yeah
is that what you were wondering
not exactly but i'll come back to it later cause i need to study some other stuff
like i have no idea what this means
What is a net?
i think it's supposed to say set

Mathematics Stack Exchange
To prove a subset is a subspace of a vector space we have to prove that the same operations (closed under vector addition and closed under scalar multiplication) on the Vector space apply to the su...

@tacit girder the rank is 1 meaning the columns must be linearly dependent
so the second column has to be a multiple of the first one
so a would =2
yes
thanks
welcome
'Let A be an orthogonal matrix. Show that A^2 is an orthogonal matrix, too.' How do I do this?
we know $AA^T = I$,
let's find $A^2(A^2)T$
$$
AA(AA)^T = AAA^TA^T = A(I)A^T = AA^T = I
$$
PorosInMyAshe:
so A^2 has to be orthogonal too
Got it thanks :)
Suppose that for a symmetric matrix A it holds that A = QRQ−1 with Q an orthogonal matrix and R an upper triangular matrix. Prove that R must be a diagonal matrix then
Is this correct: A = QDQ^-1 = QDQ^T. Then A^T = (QDQ^T)^T = (Q^T)^T D^T Q^T = Q D^T Q^-1. Then both D and D^T have to be upper diagonal matrixes so D is diagonal
?
in most cases it's synonymous with identity matrix
an identity matrix is a square matrix with 1s on the diagonal & 0s off it
if i'm given a transformation reflection matrix, how can i "prove" that it is rigid?
strawberrypocky:
Compile Error! Click the reaction for details. (You may edit your message)
close enough. ^ i got this transformation matrix, which is a reflection acorss the y=tantheta x line, and ik that reflections are all rigid, but idk my prof is asking me to prove it?
like just find the length of transformation matrix?
sorry i'm a bit lost, kinda don't remember the notatino
DrunkenDrake:
ooooh ok, thank you!
i got this problem
The chance certain seeds grow into decent plants
depends on the time between buying the seeds and planting.
of it. If the seeds are planted after a week, there is a 92% chance of the seeds being planted.
that the seeds hatch. After four weeks, the chance is only 79% and after an
year this is still 6.7%
and i need to calculate this
The chance that a seed will hatch immediately after it has been planted is about 97%. Calculate this probability to one decimal accurate.
hey all, I understand that matrix A must be a symmetric matrix for it to be orthogonally diagonalizable. But will it still be possible if matrix A is a diagonalizable matrix? Since during computation, the bases will be transformed to orthonormal bases. Or am I having some misconception in my thought process?
im having trouble proving the following are equivalent
can anyone hint as to what I have to do
multiply and divide by conjugate, that is $ (\sqrt{x+1} + \sqrt{x})$
Sup?:
starting with f(x)
ah got it, cheers
i'm just... so confused??? can someone walk me through one of them?
like i know what it means when something is one-to-one and/or onto, but like
@cunning arch can you describe what it means to be one-to-one/onto?
basically one-to-one is if each vector in like space D has a unique image/gets mapped to different places in R. onto is if each vector already has like at least 1 image in D
i think
or it's onto if the columns span R, and on-to-one if the columns of transofrmation matrix A is linearly dependent
so one way of doing this, if you're more familiar with the idea of using the columns of a matrix
is writing down the transformation matrix for each of them
so for an $n\cross n$ matrix $\mathbb{A}=[a_{ij}]$, where $a_{ij}=i+j$, how do you find det($\mathbb{A})?
Hellfire!:
Compile Error! Click the reaction for details. (You may edit your message)
If it's a factorization you need, think of 5 as $\sqrt{5}^2$
A~Z:
I think you get 0
Because if you subtract 2nd row from 1st row,you get 1,1,1...
Similarly row3- row 1 gives you 2,2,2...
@jagged marsh
you have your system written down in matrix form
Ax = b
the augmented matrix is literally just A but with b stuck to it on the right
yes
what's your matrix
one second
yes
idont think its right, cuz ive got elements on the left most collumn
i cant eliminate those
yes it can
ive got elements below 0 first collumn
you just need to stop being one track minded for a moment and like
switch rows 1 and 2
and then do rref again
wait waht
what
switch rows 1 and 2 before or after
you can continue from here
i can continue from where i am?
yes you can continue from where you are right now
the 0 0 0 0 -3 row looks kinda sus 
as long as you didn't fuck anything up in getting here
lemme check it with matlab
nvm
matlab only does rref
ehm
shall i try switching rows 1 and 3
in the original matrix
and redo ing it
if you want
with switching rows
do we want the largest element row in the top row
that doesnt make sense but hopefully you understood lmao
it doesn't mater
so long as the top left element isn't zero and you can actually do the elimination
idk
the hand(mouse?)writing is certainly horrid
but i dont feel like checking this
um
ok
assuming that im correct
how would i work out x1 x2 x3 x4 now
@dusky epoch @honest token
you can't
recall how to convert augmented matrices back into equations
is that necessary ?
the rank of the augmented and coefficiant matrix are different so that means no solutions right
its no solutions because the bottom row has all 0s except the last column
which is non 0
ok for this one
thats the row echelon form of the augmented
what next
@honest token any idea?
this one seems possible
factor out 2 from the second row?
That's definitely possible
so i can just change the matrix ?
no, you can divide the entire row by 6
so that you get 1 as the pivot
yes
what next
or you could have just subtracted the second row from the first row
fair point
um how do i convert the equations back?
the bottom one is 0x + y + 4/3 z = 2/3
so $x + 3y + 4z = 1$ and $y + 4/3 z = 2/3$
you will get a parametric form such that for any Z that is a real number there is a solution that satisfies the system
Yes:
why is z free
if a variable corresponds to the pivot column it's called basic variable
but here
z does not correspond to a pivot column
we are talking horizontal correspondence ?
and 3y + 4z = 0
yes
what does this parametric form mean
it means writing ur basic variables in terms of ur free variables
such that for ur free variable, a real number, there is a solution that satisfies the system
they wrote y in terms of z
but z = u
so y in terms of u
now if u take any real value say 1, you will get a solution that will satisfy ur linear system
((:
anyone can help
https://gyazo.com/6d6f09d98acbf55370ba2023b46c32d1

{kind=link}
hm
$\begin{bmatrix} 1 & 1 \ 0 & 0 \ 1 & 1 \end{bmatrix}$
Frosty_:
works
how did u get tehre
you know its 3 by 2
yeah
then assume its like $\begin{bmatrix} a & b \ c & d \ e & f \end{bmatrix}$
Frosty_:
yeah sounds good
welcome
Can someone explain this, and why it would be true or false?
@tranquil hazel think of A as $\begin{bmatrix} a & b \ c & d \ e & f \end{bmatrix}$ and u as $\begin{bmatrix} a \ c \ e \end{bmatrix}$
Frosty_:
is that vector in R^3
does it have 3 entries?
yes
then...
welcome
which step is wrong?
where is the mistake
i think its 3 cus thats not how the rule works
very quick question, why is it multiplying everything by 6 here?
this was shit i had years ago and fully forgot
common multiple of 2 and 3
To get rid of the denominator, yes
I can solve for t2 and t3 but how would I get t4?
tbh I dont understand the picture or how the sectioning is working here
I bodied my LA test today thanks to this discord. Thanks to all the Helpers
consider not @ ing all of them like that then...
gotta find the angle between the vectors u and v.
u + 3v is orthogonal to 2u - v. And u +7v is orthogonal to 2u + v.
which gives
looking at a solution
how did it get to the red marked one?
can someone explain to me what a generator space is, i didn't really get it
as in a generating set of a vector space?
im not familiar with the precise term "generator space"
generator set yeah sorry
a generating set is just a set of vectors; the idea behind a generating set is that we can make every vector in a certain space out of vectors from that set
let me give an analogy
if i asked you "what words can you spell with only the letters a, c, e, and f?", the set {a, c, e, f} would be the generators of some "space" of words
hmm alright makes sense
and some words in this space would be "ace", "face", "cafe", "efface"
of course we're dealing with vectors
not letters
the way we construct vectors out of other vectors is by taking linear combinations
Is there an easy way to determine if a block matrix is invertible?
essentially, adding vectors, and multiples of vectors, to each other
a proper intuition for this can only really be developed by practicing it but
as an example
lets suppose our generating set is $\left{\begin{pmatrix}1\0\1\end{pmatrix}, \begin{pmatrix}-1\2\2\end{pmatrix}\right}$
Namington:
hmm we use a different notation but ok
then the vector $\begin{pmatrix}4\-2\1\end{pmatrix}$ would be in the space generated by this set
Namington:
since $\begin{pmatrix}4\-2\1\end{pmatrix} = 3\begin{pmatrix}1\0\1\end{pmatrix} - \begin{pmatrix}-1\2\2\end{pmatrix}$
Namington:
hm yeah alright
lemme translate a theorem real quick though, it's about a "generated subspace", this is what i don't really get
heard about it?
the generated subspace is a subspace generated by a given (generating) set
so the subspace generated by my example of $\left{\begin{pmatrix}1\0\1\end{pmatrix}, \begin{pmatrix}-1\2\2\end{pmatrix}\right}$ would be ALL vectors of the form:
[
a\begin{pmatrix}1\0\1\end{pmatrix} + b\begin{pmatrix}-1\2\2\end{pmatrix} = \begin{pmatrix}a - b\2b\a + 2b\end{pmatrix}
]
Namington:
for any a, b
as an example, $\begin{pmatrix}1\0\0\end{pmatrix}$ would NOT be in this subspace, since it would need to solve:
[ \begin{pmatrix}1\0\0\end{pmatrix} = \begin{pmatrix}a-b\2b\a+2b\end{pmatrix}]
but $2b = 0$ implies $b = 0$, but then we must have $a = 1$ and $a = 0$ simultaneously, which is impossible
Namington:
(assuming you're dealing with real-number-valued or complex-number-valued vectors)
huhh i'm getting trouble typing with "" "" on latex
these things _
they disappear
underscores?
yeah
yeah but in this case is the subspace generated by $\sum_{i=1}^{n}{\alpha^i\cdot v_{i}$
rcatalang:
Compile Error! Click the reaction for details. (You may edit your message)
which is all linear combinations
indeed
so the generating set of that is the set of vectors v_i
wait
what's the full statement of the theorem
Let $W\subset E$. The set of all linear combinations ($\sum_{i=1}^{n}{\alpha^i\cdot v_{i}$) of the vectors of $W$ is $<W>$, the generated subspace, and it's the smallest subspace that contains W.
oops
there's probably something wrong with what i copied now that i'm reading it out loud
okay, it seems this is a definition-combined-with-a-theorem
rcatalang:
Compile Error! Click the reaction for details. (You may edit your message)
it defines "generated subspace" as a set of all linear combinations of elements of W
which is a definition (and the most common one)
then it states the result that this is the SMALLEST subspace containing W
which is a theorem
yes, that's the part i don't really get, what does "smallest" even refer to?
if a subspace of E contains every element of W, it must contain <W>
i.e. <W> must be a subset of that subspace
yes
as an example, if $W = \left{\begin{pmatrix}1\0\0\end{pmatrix}\right}$, then the set $\langle W \rangle$ is the set of all linear combinations of this vector, i.e. vectors of the form
[
\begin{pmatrix}a\0\0\end{pmatrix}
]
for some $a$.
now if we define a new subspace $S \subset E$, if $S$ contains $W$, then $\langle W \rangle \subset S$
Namington:
in particular, every vector of the form $\begin{pmatrix}a\0\0\end{pmatrix}$ (i.e. every vector in $\langle W \rangle$) must also be in $S$.
Namington:
this is what we mean by "smallest"
<W> being the "smallest" subspace containing W means that every subspace containing W also contains <W>
oh, well that makes sense
ad-bc != 0 means a matrix is invertible right?
if we took another subspace, for example the subspace $S$ generated by $\left{\begin{pmatrix}2\1\0\end{pmatrix}, \begin{pmatrix}1\1\0\end{pmatrix}\right}$, then since:
[
\begin{pmatrix}2\1\0\end{pmatrix} - \begin{pmatrix}1\1\0\end{pmatrix} = \begin{pmatrix}1\0\0\end{pmatrix}
]
the subspace contains $W$, which means that $\langle W \rangle \subset S$.
Namington:
this ends up being a very important fact for many proofs
basically any proof of a big result involving "dimension" relies on it in some way
(though often, it'll be through citing another theorem whose proof used this fact.)
@nocturne jewel for a 2x2 matrix, yes.
ohhh now with your examples my prof's proof makes more sense, thanks
What about a block matrix that's 2x2?
he was doing it for any W and any <W>, so it got a bit confusing
oh you mean like
a matrix composed of 4 blocks arranged in a 2x2 pattern?
the statement isnt as nice im afraid
yeah you cant just apply that without proof
proof of the ad-bc != 0 => invertible?
since the ad - bc works for 2x2 matrices whose entries are, you know, numbers
that block matrix will not be 2x2
(unless each block happens to be 1x1)
yeah it's m+n x m+n
But yeah i have no idea how to go about showing it's invertible lol
well, it suffices to find its inverse, and then show (upon multiplication) that their product is the identity matrix
of size (m+n) x (m+n)
are you familiar with block matrix multiplication?
Yeah (did it once but I can look at the textbook and notes)
of note is this
assuming A_1, D_1, A_2, D_2 are square
(which they are in this case)
why do a and d have to be square?
otherwise those products dont all make sense!
anyway, given C_1 = 0, see if you can find a set of values for A_2, B_2, C_2, D_2 that makes the bottom matrix there an identity matrix
(so A_1A_2 + B_1C_2 and C_1B_2+D_1D_2 will have to be identity matrices, while A_1B_2+B_1D_2 and C_1A_2+D_1C_2 will have to be zero matrices)
(substituting C_1 = 0 will greatly simplify these computations; it essentially becomes a system of equations.)
Ok I got entries I expected, then one I didnt
Top right is -A^-1BD^-1
Nvm it worked out
"the general solution to this system is: the set of all (1,0,-1,0) + t(-1,1,0,0) + s(-2,0,-2,1) such that t, s are in R"
by R i mean $\bR$.
kxrider:
@main nacelle
curiousity question: Can one say let S be the set of all vectors of all dimensions? If so how would it be denoted?
Just S
so if they were let's say vectors of real numbers can't i call it R ^ n where n is a variable?
Wdym vectors of real numbers?