#linear-algebra
2 messages · Page 139 of 1
I got it. thanks man @gray dust
although, i have another question
do you need to be in row echelon to identify pivots ?
for example
-3 5 -1
0 2 1
0 0 -3
we can clearly see that the pivot positions are -3 2 and 3 right ? or would u need to row reduce it to prove it
You're correct that's enough
Upper triangular will reduce to identity
If nothing on the diagonal is 0
@cobalt vale it's already in ref so you can immediately count off pivots
If a line in R3 has a director vector with two components = 0. The line will have infinite projecting planes?
Director vector lol
Np it's just funny. Unfortunately I don't follow the rest. Projecting planes?
Yeah, It is a plane that has the line and is perpedicular to any xy,yz or zx plane
Again, sorry if it is not the name of the concept, translating math is kinda hard
The line will be parallel to the x-axis, or the y-axis, or the z-axis
Yep
Yeah and will be perpendicular to either of those planes
And the plane, which that line is normal to will have infinite "projecting planes" ?
Can anyone explain to me the concept of spans ? Like what does it mean when something spans R^n
Ok, Let's say you have a set of vectors
And you consider the set of all linear combinations of said vectors,that set is called the span of your vectors{say you chose (1,0,0) and (0,1,0) in vector space R^3 ,then all vectors of form x(1,0,0)+y(0,1,0) will be the span of {(1,0,0),(0,1,0)}}
@fair vector
Now if the span of vectors is R^n ,you say the vectors span R^n
Yea got it i understood this but if there is a specific case for example in exams they give random cases lk {3,1,2} and {4,4,2} does this span R^3 how should i proceed
is their any tricks
You know what a basis is?
yea
Check the number of linearly independent vectors in your spanning set
If it is equal to dim(space),it spans. Otherwise it doesn't span
oh okay thanks i didnt know all this
i have a dumb question
shoot
this arrowed part
i know ive done this before but now i cannot for the life of me remember
you find the free variables
then you set it to be some parameter
im not understanding how to use this though
this is for finding the bases of the null space
most links i find skip over the details
or maybe the details are included and im not seeing it
you can switch back to the equation view
you have
x1 + x4 = 0
x2 + x4 = 0
x3 + x4 = 0
oh you just split it into a system
i figured that was not valid for a second
im not sure why
i got it 🙇♂️ thanks
im trying to understand a proof that i am working through that contains this line
It seems rather non obvious that this statement is true and it is given without explanation
Is your doubt about T being linear?
no
it's a geometric series
Hello, I am kinda stuck with this problem: How many equivalence class are there for this relation?
@opaque plover do you still need help?
@marble lance yes please
Sorry, will ping you in 20 min
alright thanks
@opaque plover nvm
Do you know that for every integer a and positive integer b, you can find integers q and r so that a = bq + r and 0 <= r < b?
How do you come to this conclusion, because I cant follow you, sry
this is just division with remainder
for example, if a = 258 and b = 13, then you get 258 = 13*19 + 11
yeah i got that
Okay, great
So now you have to show two things: 0, 1,2,...,n-1 belongs to different equivalence classes; and every integer belongs to one of those classes
That would mean there are n equivalence classes: one for each possible remainder after division by n
Does that make sense? @opaque plover
Consider 0 <= i < j < n-1. Then 0 < j-i < n, so j-i is not a multiple of n. So i and j belong to distinct equivalence classes. This proves the first part
Now consider any integer a. Then a = nq + r, so a-r = nq. Then a belongs to the same equivalence class as its remainder r. This proves the second part.
ohhh yeah that makes sense, how can you solve this so fast lol
I'm already familiar with the proof. This is a very well known equivalence relation
Np
If I want to prove the vector space of real sequences with limit=0 H is a hyperplane of the vector space of real convergent sequences N, is it a valid proof to say:
I take any real convergent sequence (a_n) of limit L, I build the sequence (b_n) such as b_n=A_n -L belongs to H, and then each sequence from N can be separated in one sequence from H and one constant sequence, then H is a hyperplane of N?
what's your defn of a hyperplane
https://i.imgur.com/6hmO665.png
Hello, I need an answer here if possible
I am asked if there exists a linear transformation
T, s.t Ker(T)=V AND
3 is a eigenvalue of T
Now, for Ker(T)=V that means it spans all the same
but 3 is an eigenvector meaning
T(v) = 3v for some v
because v != 0, then 3v != 0 and thus T(v) is NOT in Ker(T), does that disprove the existence of such a transformation?
Because on one hand KerT = V
on the other hand here's a v that is only in the Image ?
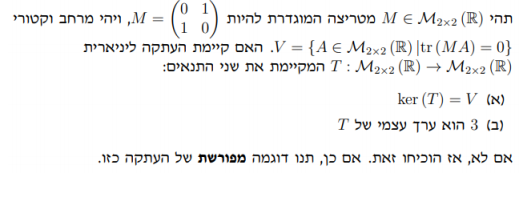
V, T, M all written in the picture
I'm going through Linear Algebra Done Wrong by Treil and I was wondering about the question in the image below part c. I'm not sure how to show that it's not a vector space.
There is no additive identity
<@&286206848099549185> pls, it's semi-urgent
@magic light Why is that?
Can the coefficients on linear combinations be irrational?
why not
Well I dont see how anything would be linearly independent
Well I dont see how anything would be linearly independent
@wintry steppe they can be anything from any field
(Ok,The field your vector space is defined with)
for your vector space question, consider two polynomials, one with leading coefficient 1 and one with -1
add them and you'll see that the result is not in the set
hence it's not closed
So wait what would an example of a linearly independent system in R be then?
@idle current because I submitted it as a test answer, and I got partial points, wanted to know if I can get a little more depending on how wrong I was
there's only a limited amount of days that I can ask for a review
The reason I ask is because im struggling to see how any system could be independent in R if we can just take any real number as coefficients
should this be evaluated as $(x_1 \wedge x_3) - (2x_1 \wedge x_2) + (4x_2 \wedge x_3)$ or as $x_1 \wedge (x_3 - 2x_1) \wedge (x_2 + 4x_2) \wedge x_3$
I'm slightly confused as i can't find anything in the notes. My feeling tells me that the first evaluation should be correct since it's kind of a multiplication but idk, might be a dumb question
chrisply:
ok well since the exterior product fulfills distributivity it should definitely be the first evaluation order, right ?
2t+8=3
can someone help?
Have you solved the characteristic equation?
why am i of all people getting pung out of the blue
Oh, they pinged me first, then deleted the message 😛
k so what are you having trouble with
if you want
And then solve for lambda?
before you solve for lambda you need an equation to solve for lambda
Could I use the 4x-y+lambda z = 8?
depending on what you mean by "use"
do you want me to pretend this question admits one and only one solution path & tell you exactly what steps go into it?
evaluate determinant, set determinant equal to zero, solve for lambda
on top its the solution for Ax=b, but they ask for the solution for Ax=0
If you need an hint: || Suppose Ax = b and Ay= b. Then what is A(x-y)?||
Sorry for the really late response, I'm still a bit confused. A(x-y) would just be b-b=0 (?)
Are we supposed to solve the system 5+t+3r=0, 1+t=0,-2+5r=0,3+t+r=0? Because that ends up inconsistent so no solution set, so I think that's incorrect
no. you are not given A
what they tell you is that all vectors of that form where t and r are numbers are solution for the system Ax=b
and they want you to find the solution to Ax=0 from just that information. They do not tell you what A and b are.
Im trying to solve for the eigenvalues and vectors of the Map:
T(w,z) = (-z,w)
Axlers explanation for finding the Evalues is lengthy and easy to follow. They are i && -i. His explanation of the vectors is just "Therefore the vectors are (w,wi),(w,-wi)" and i just cant see how he came to this conclusion.
nevermind i see how it works
how did i mess up on the gaussian elimination to incorrectly determine that this matrix's vectors are linearly independent
(1,4) + (-1,4) = (0,8)
also, avoid writing that the matrices are equal, because they're not
they're equivalent via elementary matrices
ok thanks
can someone confirm that rankA = rankA^T = nullA = nullA^T = 1 for this matrix
I'm also not really sure what he wants the reader to say about their relation
🤔
can someone confirm that rankA = rankA^T = nullA = nullA^T = 1 for this matri
Sounds right
relation
It's the same space (1, i)?
Maybe there's a term for that or something
I thought that was interesting, I noticed that A^2 = 0 and figured there was something to it
there's probably some wacky spectral theory shit you can do with nilpotent matrices
wdym by "have no solution"
the system has no solution
oh, like if Ax does not equal b for some b in the codomain
that system has no solution
so its not linearly independent
therefore it's not a basis of r2
or am i missing something here
ax=0
oh wait yikes
i performed elementary operations wrong
if you put it into a matrix, you can reduce it to
0 2
20 0
which implies that nullity of the matrix is 0
no worries
d is false, that's only true for surjective linear maps
everything else looks good
i dont agree with d
i was thinking more like. for any vector w in W there exists at least one v in V such that T(v)= w=>T(V) = W
that was my explanation for it
see, that's not necessarily true though
let T be a matrix, if there isn't a pivot in every row, then that's not true
the pivot stuff is confusing, but once you think with rank stuff it becomes 30x easier
hit me
true, false, false, false, true, true, false, false, false, false I think
I wrote f is true
no f is false
I'm not 100%, I just finished the exact same material
a pivot in the last column would make it inconsistent
pivot in each row is consistency, pivot in each column is spanning
because you get 1 = 0
it's rows not columns in F
sorry, pivot in each row of the coefficient matrix
not the augmented matrix
I guess if they're specifically referring the the augmented, then no, but none of the pivot rules refer to augmented matrices iirc
How to debunk every single mathematical theory:
this is incosistent
because 1=0
Sorry, yeah, i didn't read the "augmented" part because that fucks everything up
but h is false, that would imply that columns have pivots, not rows
i is true, I was dumb
j is equivalent to h I believe
wait fuck yeah I'm being dumb
j is true my bad
Can anyone recomend a book that talks about the history of the hessian matrix? On wiki there really isn't any history behind it. Thank you
ok i'm legitimately stupid. despite the help earlier, i still don't know what to do with this. i understand what it's asking, just not how to find it (?). could someone guide me through this one please?
Just for ease of writing, I'll label those vectors such that:
x = u + tv + rw
It is the case that:
Au = b
Just by setting t = r = 0
Then,
Ax = b
A(u + tv + rw) = b
Au + A(tv + rw) = b
b + A(tv + rw) = b
A(tv + rw) = 0
oooooooh
wow that ended up being a lot more simple than i thought. thank you so much @half ice, that made a lot more sense :)
Np! Feel free to ask if you need anything else
why urgently?
the "(1 point)" might be a hint lmao
- Requesting help during an exam is a bannable offense.
#rules
so uh, am i the only one they cold-DMed to get help? nice 
i'd normally rather give the benefit of the doubt, but considering the cold DM...
hrm...
It's not really urgent
Not an exam
Still here
Just urgent because I intend on sleeping soon
Anyways I figured it out
what's a good place to learn about dual and double dual spaces?
Hoffman kunze had a good introduction,I think
alright cool I'll check it out
does x = [0;0;0] satisfy the equation a · x + 2 = 0 or not
Obviously not since we add 2 to it after
Is that it?
any vector multiplied by 0 vector will give 0s
Adding 2 will give us 2
yes that is it
The question asks to find the set of solutions for x+2y+3z=0. How can this be done?
is a "square semi orthogonal matrix" always going to be orthogonal?
i thought a square matrix could not be semi orthogonal
@unique yew We can solve for x or y or z if we have values for two variables. So put y=t, where t is any real number, z=s, where s is any real number and solve for x.
@quasi vale how is this going to prove the number of solutions?
also thanks for answering
can anyone help me out on the 3rd step? the solution is so vague in microsoft's math solver.
@dim venture it means that if U is a subset of W, then Uperp (orthogonal complement) a subset of Wperp
https://discordapp.com/channels/268882317391429632/409596215697866773/767872137380888606
if anyone can help that'd be nice
is this supposed to be a "gotcha!"?
I did det(A^T) = (-1)^n*det(A) = det(A), and if n is odd then -det(A) = det(A) and so det(A) = 0
if n is even then it's not necessarily true right
Let n be odd, then look at the $n\times n$ matrix $(a_{i,j})$ with $a_{i,n-i+1}=\begin{cases}1&i=1,2,...,n/2\-1&i>n/2\end{cases}$ and $0$ everywhere else
Whoever:
Basically the matrix $\begin{bmatrix}0&0&\dots&0&0&\dots&0&1\0&0&\dots&0&0&\dots&1&0\\vdots&\vdots&\ddots&\vdots&\vdots&&\vdots&\vdots\0&0&\dots&0&1&\dots&0&0\0&0&\dots&-1&0&\dots&0&0\\vdots&\vdots&&\vdots&\vdots&\ddots&\vdots&\vdots\0&-1&\dots&0&0&\dots&0&0\-1&0&\dots&0&0&\dots&0&0\end{bmatrix}$
Let's see if texit can render this abomination
Whoever:
Ive made the system into an augmented matrix. Then tried to make it into row echelon. After this I tried solving for the different solutions
I’m unsure if my equations and approach are correct
I’m pretty sure my iii is incorrect
So geometrically these are two lines through origin...they have a unique solution i.e $(0,0)$ if and only if their slopes are different i.e $12\neq (1-\lambda)(2-\lambda)$...so infinitely many solutions are possible when $12= (1-\lambda)(2-\lambda)$ which i am sure you can solve...
Arpan:
@pseudo abyss thanks! could you explain how you equated both the equations and figured that out tho?
Just equate the slopes of the two lines...first one is $(\lambda-1)/12$...second one is $1/(\lambda -2)$
Arpan:
yeah i get that, but why is that when they are equal to 12 that they have infinite solutions, but unique solutions when they arent equal to 12
no obviously in a server of thousands nobody is ever online and this server has been empty and desolate for years /s
@wise flare is there a question you wanted to ask
Can someone tell me how the matrix (f:e,e) and (f:a,a) are calculated? I need the methodology. No need to explain to me just tell me what to google
@pure thistle
This looks like the outputs of f evaluated at e1, e2, then arranged into a matrix. Then the other matrix is the outputs of f evaluated at a1, a2
I wouldn't know what to tell you to Google, I don't know why they're doing this
Have some context, perhaps?
The subject is linear algebra 2. This one is the first thing written in notes and i dont remember if it was in linear algebra 1 or I'll learn it in linear algebra 2
It could be a linear operator represented in two different basis?
Yeah probably something like that
someone want to tell me how to find the image of transformations
if someone could help me understand why my answer on this problem is wrong;
here's the givens I have
I'm trying to find [id]_C ^B
I'm attempting to use:
so i figure that
$[\text{id}]_c ^b = \begin{pmatrix} 1 & -3 \ -1 & -3 \end{pmatrix} \begin{pmatrix} \sfrac{1}{3} & \sfrac{1}{9} \ \sfrac{-1}{3} & \sfrac{2}{9} \end{pmatrix} = \begin{pmatrix} \sfrac{4}{3} & \sfrac{-5}{9} \ \sfrac{2}{3} & \sfrac{-7}{9} \end{pmatrix}$
jan Niku:
this is wrong though, im struggling to see why
@half forge If V and W have the same dimension, you can map a basis from V to a basis from W, that's a Isomorphism
You don't speak of dimensions if V and W are infinite dimensional
so then is it false or true

2 finite dim vector spaces over a field F
not specified to be findim & over the same field

Mathematics Stack Exchange
Show that the determinant of a matrix $A$ is equal to the product of its eigenvalues $\lambda_i$.
So I'm having a tough time figuring this one out. I know that I have to work with the characteristic
Why's the coefficient 1, other than (-1)^n?
Must not have been |c|(-1)^n where c is a constant?
Oh that seems too heavy to assume implicitly 😅
But even if that's the case, there doesn't seem done obvious reason why the equation will turn out to be as such... Can you guide me with a hint?
I mean,The easiest thing to do is probably convert the matrix to a upper triangular matrix similar to it
The det(A) being product of eigenvalues and tr(A) being sum both follow immediately
What I understand without Leibniz is - the eighth values must form linear factors in the char polynomial, and the method of taking det will give that -1^n
Okay @native rampart, that seems quick. I'll think and revert if that's fine..
A Hilbert Space is just a linear vector space with some additional properties? Is my understanding correct?
Yes
Okay, thanks but I still am not able to understand it fully what it means... I looked it up on Google but the answers there just confused me... so,, can someone please explain it to me... just an overview would do
what is T(u+v) equal to?
it's written in your picture
oh
Assume that $T:V\to V$ is a linear transformation and that $\beta$ is a ordered basis for $V$ let $[T]\beta$ be the coordinate matrix to to the matrix $T$ with respect to $\beta$ then $$T \quad\text{is isomorphic}\quad \iff [T]\beta \quad\text{is invertible}$$ then if $T$ is isomorphic we have $[T^{-1}]\beta=([T]\beta)^{-1}$
homomorphism:
how is $[T^{-1}]\beta = ([T]\beta)^{-1}$, why is this true?
homomorphism:
How did you write [T] post B?
T post B?
(What do you call the small beta on the bottom)
ordered basis of V
$T \mapsto [T]\beta$ so
$T^{-1} \mapsto [T^{-1}]\beta$ implying
$TT^{-1} \mapsto [T]\beta [T^{-1}]\beta$
i.e.,
$[T]\beta[T^{-1}]\beta=I$
DrunkenDrake:
Do you understand the isomorphism condition?
what justifies that you can write $[T]^{-1}\beta = ([T]^{-1}_\beta)$
homomorphism:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
yeah, that it holds the same structure under a transformation
You know $[T]\beta [T^{-1}]\beta$=I
DrunkenDrake:
Which means $[T^{-1}]\beta$ = ${[T]\beta}^{-1}$
DrunkenDrake:
If i have a linear transformation from a vector space to itself, do I need to write the input space and the output space wrt the same basis? For the purposes of representing it as a matrix
You could just say it's an operator on V ,or whatever your vector space is
oh yeah that is how the question is phrased
I have a linear operator on V, and need to show that I can get a matrix representation of some form or some other form
and I'm wondering if I can let the "input basis" and the "output basis" be different
You could,but you generally wouldn't
Ok, thanks!
Anyone that can explain this to me? The span is smth I just cant wrap my head around
No matter how many times I read the textbook, I don't get wts going on
I'm on this topic rn too so kinda blind leading the blind but
at least on parts a and b
i think the dimension of the space is going to be the number of linearly independent columns you have
Yes
so to find b, you just need to find r and s to make those two columns linearly dependent
i dont think you can get to dim W = 1
just looking at the first and last rows
but thats my guess
Yeah
@waxen jacinth you prolly got recommended this already but the 3b1b video on span is good
once you can visualize or grok or understand span the rest sorta falls into place
at least thats how it was for me
me too last night
cept the one on bases
i dont really like his videos on lin alg but i keep going back to them for some reason
Do you know the definition of "span" diemia?
Well for 2 of those vectors, to be linearly indep, theyd need to fulfill these conditions:
r-2=1
r+2=/=1
s-1=0
I think
not quite
A span is (probably gonna butcher the statement) a representation of the linear combinations of vectors
well, sort of; the span is the set of all possible linear combinations
so it's every vector you can get to through linear combinations
Yeah, for example in 2D, u can get either all 2D vectors or just a line restricted by the vectors whose combinations u find
So yeah for the dimension of the span of those vectors to be 3, all of them need to be linearly independent, so you need
$$a_1\begin{pmatrix}1 \ 0 \ 0 \ 0 \end{pmatrix} + a_2\begin{pmatrix}0 \ r - 2 \ s - 1 \ 0 \end{pmatrix} + a_3\begin{pmatrix}0 \ 2 \ r + 2 \ -3 \end{pmatrix} = \begin{pmatrix}0 \ 0 \ 0 \ 0 \end{pmatrix}$$
To have no solutions other than $a_1 = a_2 = a_3 = 0$
Nicholas:
if all three are linearly independent, they'll span something 3 dimensional
Yeah
It'll be at most an "infinite cube" I guess
In a 4D space
One plane remains untouched
In the 4D coordinate system
The other 3 are all filled in
so you can literally just solve for the values of $r$ and $s$ that cause that equation to only have the solution where $a_1 = a_2 = a_3 = 0$
Nicholas:
Can't I just plug them all in one matrix and make it so there are only 2 pivots?
Since the problem needs dim(W)=2
Oh nvm
Lul Im just tired excuse me ur correct
I havent had anything but 2 eggs today xd
Yes, so 3 pivots then
wait weren't you solving dim(W) = 3?
yes, but do dim(W) = 3 first
Both those questions should be solved, but the first one is dim(W)=3
it's more direct
Yeah sorry xd
just find the values of r and s so that the only solution to the linear dependence I wrote above is a_1 = a_2 = a_3 = 0
So, for that, I'd need
r-2=1
s-1=0
r+2 can be anything?
No, r+2 should be 0
As the last column will serve as the pivot column
On -3
I think.
Im confused
I mean, no matter what I do to these vectors, theyre never gonna be linearly independent cuz theres too many variables
yes they very much are able to be linearly independent
I would suggest breaking it up row by row. First, look at the top row, then look at the bottom row. You can get rid of 2 of the variables right away
So the first row gives you $a_1 + 0 + 0 = 0$, so $a_1 = 0$
Nicholas:
the last row gives you $0 + 0 - 3a_3 = 0$, so $a_3 = 0$
Nicholas:
so you now need to find the values of $r$ and $s$ that FORCE $a_2 = 0$ and you're done
Nicholas:
that gives you 3 linearly independent vectors, so a 3-dimensional subspace
There are a lot of projections that aren't injective 

@waxen jacinth if r = 2 and s = 1, then a_2 = 5 or a_2 = 3 or a_2 = any real number works
you want either r or s to NOT equal 2
so that a_2 = 0 works
@normal falcon yes
How do I show that the projection is an injective linear transformation?
Show Ea=0 implies a=0
Usually it's not
well and prove it is indeed linear. I'm pretty sure that does not necessarily imply linearity on its own
(take f(x) = e^x -1 for example, def. not linear as f(a)+f(b) = e^a + e^b - 2 ≠ e^(a+b) - 1 = f(a+b); but f(0) = e^0 - 1 = 1-1 = 0)
Sorry, I posted this earlier in a question channel and I didn't get any help so I'll post again
Is this as straightforward as the matrix just being rows of Av_k, and so $A = (\lambda v_1, ..., \lambda v_n, Av_{n+1}, ..., Av_k)$, which is just the block triangular matrix since $\lambda v_n = \begin{pmatrix} 0 \ \vdots \ \lambda \ \vdots \ 0 \end{pmatrix} $ in that basis
bacono:
Compile Error! Click the reaction for details. (You may edit your message)
@brisk fractal seems like some spectral stuff
(To bacano) Yea I think you have the right idea. For a proof, u would just have to show that the action of the block matrix on basis vectors is the same as the action of A on basis vectors
n3therite:
^ not super sure what to do
(To bacano) Yea I think you have the right idea. For a proof, u would just have to show that the action of the block matrix on basis vectors is the same as the action of A on basis vectors
@slow scroll doesn't this just imply that the linear operators are equal, not necessarily the matrices? or does that not matter if they're in the same basis
the image of the first k vectors v_i by A is λv_i, so you can write the first k rows of the matrix as the beginning of λ•I_n.
For the other vectors, you have no information other than their image exists.
So you can write the first k rows as λ•I_k on top and 0_kx(n-k) at the bottom, and the (n-k) other rows as a combination of some (n-k)xk matrix on top and some (n-k)x(n-k) matrix at the bottom since you have no information
suppose i have some m-dimensional subspace W of an n-dimensional vector space V with basis vectors w1,...,wm. if i put the coordinate vectors of each vector wi with respect to the standard basis of R^n as the rows of a matrix A, then the null space of A will contain every vector x in R^n for which the standard Euclidean inner product on R^n of the coordinate vector of wi and x is zero.
could i then say that a basis for the null space of A, v1,...,v(n-m), consists of coordinate vectors for a basis for the orthogonal complement of W back in V? or would that only work for a specific inner product on V?
that is just a consequence of working in the usual inner product on R^n (or C^n). You can't do this with arbitrary inner products
so you cant always use that null space method to find a basis for the orthogonal complement because the inner product might be different?
however if we're dealing with some definition of an inner product which results in exactly the same thing as the dot product of the coordinate vectors (a standard inner product i guess?), then it does still work though?
okay well I've proven the two lemmas
I have no fucking clue of how to go about 1.9
the geometric multiplicity of an eigenvalue is just null(A-aI) right
and I assume they want you to fuck around with A so it can be arranged like in 1.8 so you can take the determinant using 1.7 to obtain some result about algebraic multiplicity of the same eigenvalue
but, for our space, we just know that Ker(A-aI) has a basis, not that that basis corresponds to the same basis at V
or at least to some finite subset
is this a valid elementary row operation: (R3-1/3(R1+R2))?
yes
Thank you!
Is there an application for transposes? (context my course just introduced the transpose this week but I dont see the point in it)
they will be useful in a lot of ways, yes.
for one, there matrices for which $M^{-1} = M^T$ (orthogonal matrices, the O group), and also those for which $\bar{M}= M^T$ (where the bar is complex conjugate) (hermitian matrices), and both of these groups happen to be common in physics. @nocturne jewel
ConfusedReptile:
Yeah when M = M^T it's symmetric
(orhogonal matrices conserve distances and so are basically rotations, whereas any transform from a basis to another happens to be a hermitian matrix, and a lot of physics uses coordinate transforms)
so yeah, transposes will be important.
Ok cause first glance is: Swap rows and columns ✅




if you have a linear combination of the vectors in the set, then one vector in the set is in the span of the other vectors and by definition the set is then linearly dependent
yes.
so then what are you proving exactly
by definition the set would be linearly dependent
well, i don't think that it's by definition.
if you have a linear combination of the vectors in the set, then one vector in the set is in the span of the other vectors
I just proved this statement, no?
that's what i did.
adding a linear combination of the vectors in your set, will not let you leave your set
the definition of linear dependence of a set of vectors is if $0 = \sum \alpha_n \mathbf{v}_n$ for nontrivial $\alpha_n$, i.e. $\mathbf{v}n = \frac{1}{\alpha_n} \sum{n \neq i} \alpha_i \mathbf{v}_i$, or rather $v_n$ has a representation as a linear combination of the other vectors
thank you latex
_ outside of math mode fucks things up.
latex tries to autocorrect since it thinks you forgot to add a $ before the v_n
anyway, it follows directly from the definition, you don't need to prove it really
but it doesnt autocorrect it afterwards
anyway, it follows directly from the definition, you don't need to prove it really
@brisk fractal
you must have very generous TAs
texit is kind of messed in the sense that dollar signs are bad latex anyway, I much prefer using \( and \[
what
$ for in-line mathmode is totally fine
$$ are more dubious because of spacing reasons
it does? I swear it doesn't
Namington:
example: \[7x+5\]
https://en.wikipedia.org/wiki/Grave_accent#:~:text=The grave accent ( ` ) (,many%20other%20western%20European%20languages.
The grave accent ( ` ) ( or ) is a diacritical mark used to varying degrees in English, French, Dutch, Portuguese, Italian and
many other western European languages. It is also used in other languages using the Latin alphabet, such as Mohawk and Yoruba, and with non-Latin writ...
wow I'm dumb then
surround your entire text with it, it'll force the tex to work
no
that wouldnt have fixed it here
the problem was the v_n outside of math mode
thats it
tex generally works without code mode in markdown
latex doesnt like underscores outsidde of math mode
put $ around $v_n$
back on topic
oh shit I see what you mean nami
the definition of linear dependence of a set of vectors is if $0 = \sum \alpha_n \mathbf{v}_n$ for nontrivial $\alpha_n$, i.e. $\mathbf{v}_n = \frac{1}{\alpha_n} \sum_{n \neq i} \alpha_i \mathbf{v}_i$, or rather v_n has a representation as a linear combination of the other vectors
ninnymonger:
Compile Error! Click the reaction for details. (You may edit your message)
bacono:
the problem is the v_n
kek
latex thinks _
there we go, thank you nami
can you read
@limber sierra i didn't believe you. now i do.
aaaanyway
this is not linear algebra @wintry steppe
and youre interrupting an ongoing discussion anyway
okay
let me try and
get back on topic
the nicest proof of the fact you're trying to show ninny is
say you have a pair of vectors u, v that is not linearly independent
this means that au + bv = 0 for some nonzero a, b
yes.
now say we add a new vector to this set, say w
but i said nothing about a and b's being linearly dependent or not.
yeah good point
my bad
okay so
say you have au + bv = w
so w is a lin comb of u and v
then au + bv - w = 0
qed
yeah that's how I would prove it
v_1 + v_2 + (av_1 + b_v2)
but yeah, ninny, you're overcomplicating it a bit
let $w = av_1 + bv_2$ and there
you can give v_1, v_2 any coefficients youd like
you're done
does it work though, as it is?
for v_1, v_2
tfrankov:
so if you have a linear combination, say av_1 + bv_2
then you can just take
the coefficients -a and -b
-av_1 + -bv_2 + (av_1 + bv_2) = 0
by basic algebra
if you prefer to write it like that
anyway ill skim your proof one sec
this manipulation is unjustified if x is zero
indeed, you just assert x is not equal to 0 without ever showing it
so?
i'm assuming that's supposed to be an alpha, not an a
but even then
z could be 0
and then x = -zalpha = 0
yeah, alpha
indeed, no matter what you do, x = y = z = 0 will be a solution
youre not supposed to reason on that case, youre supposed to show there exist coefficients x, y, z not all 0 that solve 0 = xv_1 + yv_2 + z(av_1 + bv_2)
[here a means alpha, b means beta]
but that's trivial solution
we need to find that a zero vector can be found without the trivial solution to show linear-dept.
exactly, and you never do that
unless you mean youre setting -z to x/alpha
but that doesnt work
my starting assumption was only a \neq 0 and b \neq 0
and from that, i found that z, y, x, can all be non-zero and still yeild the zero vector.
unless you mean youre setting -z to x/alpha
@limber sierra yes?
how? what values should x, y, z take?
@limber sierra they're just elements of a field, any elements.
$x\begin{pmatrix}1\0\end{pmatrix} + y\begin{pmatrix}0\1\end{pmatrix} + \frac{-x}{1}\left(1\begin{pmatrix}1\0\end{pmatrix} + 2\begin{pmatrix}0\2\end{pmatrix}\right)$
observe that i've set z = x/alpha
forgot a negative, whoops
whenever texit wakes up...
Namington:
i forgot to list x, y
ugh
wait no this is fine
and yeah that provides a counterexample to your proposal of
setting z = -x/alpha
since clearly that sum is (0, -1)
which is not the 0 vector
indeed, the problem comes from this step
even if we assume everything is nice and nonzero
(which is true but you dont justify it)
as soon as you manipulate the x/a = y/b
it is no longer equal to -z
indeed, let's think about what you mathematically did to the equation x/a = y/b
to get from x/a = y/b to y/x = b/a
you multiply both sides by b/x
since (x/a)(b/x) = b/a, and (y/b)(b/x) = y/x
so if youre doing that to both sides
you also have to do it to -z
-zb/x = y/x = b/a
which... doesnt really tell you much
but the point is: you shouldnt have to derive anything (and indeed the thing you derived is false)
all you need to do is give an example of values of x, y, z
that make xv_1 + yv_2 + z(av_1 + bv_2) = 0 true
(of course, your values will depend on the values of a, b)
the example i gave is x = -a, y = -b, z = 1
then you have:
xv_1 + yv_2 + z(av_1 + bv_2) = -av_1 + -bv_2 + (av_1 + bv_2) = 0
which is certainly true
and this proves linear dependence
since we do have a nonzero coefficient
(indeed, z is guaranteed to be nonzero, since it's just 1)
the example i gave is x = -a, y = -b, z = 1
@limber sierra
this makes sense.
i don't get what happened here: #linear-algebra message
i followed your proposal of setting z = -x/alpha
i considered the set {(1, 0), (0, 1)}
and then the linear combination 1(1, 0) + 2(0, 1)
and then set z = -x/alpha as you suggested
but the resulting sum was not (0, 0) the zero vector
it was (0, y-2)
so clearly your proposal doesnt work
oh whoops i just realized i typod
this is what i meant
replacing that 2 with a 1
yeah, i figured that two was a typo....lemme do some scratch work.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
mood
i'm trying to recover. that was a lot to take in. i'm still trying to understand what my unjustified step was.
your unjustified step was thinking $-z = \frac{x}{\alpha} = \frac{y}{\beta}$ implies $-z = \frac{x}{y} = \frac{\beta}{\alpha}$
Namington:
heres a simpler example of where this doesnt work:
2-1 = 1 = 1
but 1=1 becomes 0=0 when we subtract 1 from both sides
that dosnt mean 2-1 = 0 = 0
uh.... can linear programming and research op be included here?
no. i never made the leap that -z = b\a
ah i misunderstood what you were doing
your work is very weird since its unclear what youre actually trying to accomplish
let me reread
okay, so it seems your proposal is to set z equal to -x/a, and also equal to -y/b?
so youre picking z "after" you pick x and y?
but then what should x and y be set to
👀
anything.
but that can't be the case as
if you don't set y to the correct value
x/a = y/b wont be true
indeed, you need to set y = xb/a
that would in fact fix this example
since then y would be -2x
but in any case, all of this work/derivation is a very... indirect way of showing the result
the only thing you need to show is that nonzero x, y, z that satisfy this equation exist
you dont need to show how you found them or whatever
you just need to:
#1 - tell us what they are (and that they're nonzero)
#2 - show that they make the equation equal to 0
now if you set y to the correct value then your proof kind of suffices as step #2?
but one needs to go "backwards" through your proof to connect the dots
and its not always necessarily clear that these "backwards" manipulations are justified
(although in this case, everything you did is invertible so it DOES work, but you never explicitly state that either)
a far easier way to show that your proposal for #1 suffices to show #2
is to just plug in the values
into the equation xv_1 + yv_2 + z(av_1 + bv_2)
and show that they make it equal to 0
now, dont get me wrong: you're allowed to go the other way to figure out what those values should be
(this is very commonly done in epsilon-delta proofs for instance)
but you dont need to show us that
the example i gave is x = -a, y = -b, z = 1
@limber sierra
imma go with this. this is short and sweet
thank you for your kind time and attention.
Would anyone be interested in tutoring me at an hourly rate?
Just failed my midterm
Feel free to ask any questions you may have here. We don't condone money transactions over the server
umm guys, what channel i will ask about quadratic equation
Yo guys
Does anyone know how to do it?
I have been stuck on it for a while now lol
if I have a matrix a 2x2 and matrix b 3x2 can I do a*b?
Nah fam
$b$ would represent, say, a linear transformation $T_b: \bR^2 \to \bR^3$ while $a$ represents a $T_a: \bR^2 \to \bR^2$. The composition $T_a \circ T_b$ is not well defined. Therefore your matrix product $ab$ can't be well defined either
derivada.schwarziana:
I like to go with this picture when thinking of matrix multiplications. The only way the matrix multiplication works is if the dot products uses two similarly sized vectors
I never went back
Some of my 4th year engineering exams have matrices aligned like this lol
my dept's freshman algebra actually motivates matrices by the dot product in some way; start studying rotations in the plane (i.e. R^2) and you'll naturally be led to the rotation matrix
some notes I took waaaaaay back then:
@soft burrow french?
That's not french
see the url
This isn't a quiz
It's a learning activity
Where we have multiple attempts and we can answer as many times as possible
Want me to prove it
Look
If u want proof @frosty vapor
What kind of quiz tells you that you got the answer right after you input it
many of them actually. even Khan's do iirc
Does anyone know how to do it?
the orth. complement of "a" is all vectors that are orthogonal to "a"
Damn how did u do that so quick lol
Ohh ok I got what u mean
So u made the variables y and z =0 so the answer doesn't look gross
Thanks guys!
Also what do those symbols mean
So u made the variables y and z =0 so the answer doesn't look gross
yeah, since here we just need one vector
Below the solution the bot posted
oh, if I react I can e.g. delete the rendered TeX, or delete my original message where I wrote the code
for instance I just removed the original messages to clean things up
I should be studying rn  sorry
sorry
but post your question anyway and see if someone else answers
Lol u a graduate student?
last year undergrad, taking some grad stuff
Ohh ok cya later then and good luck with ur studies!
Wait
@soft burrow um, it says that it is wrong?
uh I might've made some dumb error somewhere. We had x+17w=0 right? so x=-17w, and if w=1 then x=-17. (-17,0,0,1) or (17,0,0,-1) should work
Yay thank you!
Another question for anyone free, just posted again so u guys don't have to search for it
Hello guys, I am having trouble connecting the proof. I started on both sides, so if $S=S^{m}$, then I'm done. However Im not sure how to show that, and this approach may not even be correct, any help would be appreciated
Otoro:
<@&286206848099549185>
Well if it's not that, then it may perhaps be $(STS^{-1})(STS^{-1})=ST^{2}S^{-1}$
Otoro:
So is it the case that $(STS^{-1})^{n}$, is just the inside composed to itself n times I guess
Otoro:
Well if it's not that, then it may perhaps be $(STS^{-1})(STS^{-1})=ST^{2}S^{-1}$
Yes
DrunkenDrake:
So you get $(STS^{-1})^n=S(T^n)S^{-1}$
DrunkenDrake:
(Prove that by induction)
Oh.....
So are you saying that I need a prove by induction within the question 14 ?
And from that result, I could conclude that^^
Yes
hey
quick question: in Matrix, the dimension of its kernel is also the number of "0" as eigenvalues, right?
like the power of (lamda) in M(matrix) in the charcristic polynomial
Yes(No of linearly independent vectors with eigen value 0)
I mean
thouse are different things, no?
algebric and geometric they are not necessarily equal
They are always equal
no
if the matrix is Diagonalizable they are equal
1 2
0 1
The charcristic polynm is (1-x)^2 so "1" is eigenvalue with the power of 2. but the number of lineary independent eigenvectors with eigenvalue "1" is 1
Geometric
Here is my attempt. By theorem 5.10, let $\lambda$ be the eigenvalue of T. Suppose a is an eigenvalue of $P(T)$, then for any $v \in V$, $P(T)v=av$. Then $$P(T)v=[a_0+a_1T+...+a_mT^{m}]v=a_0v+a_1Tv+...+a_mT^{m}(v)]v$$ $$=a_0v+a_1\lambda v+...+a_m \lambda^{m} v=[a_0+a_1\lambda+...+a_m \lambda^{m}]v=P(\lambda)v$$ Thus, $av=P(\lambda)v$, therefore, $P(\lambda)=a$. I think that reversing the steps are also valid, proving both directions.
Otoro:
How do you know eigenvectors of P(T) are also eigenvectors of T?
Hi 😄 I'd appreciate some help with this problem. We can see that (d) doesn't form a subspace since the zeroth vector isn't part of it, but I'm lost on the others
Do I have to go through them one by one to prove they fulfill the requirements to be a subspace or is there a more efficient method?
The efficient method is to show ca+b will be in the space for all vectors a,b and scalars c
Okay and then to find a basis for said subspace, in the case of (a) for example, would vectors (2, -1, 5) and (6, -1, 15) be correct?
Since any vector in the subspace can be written as a linear combination of those two
Yes
Okayy thanks ❤️
@native rampart I assume that you mean I need to prove the other direction separately then
because lambda is an eigenvalue of T as I've stated at the start
I meant to ask,how do you know v should be an eigenvector of T,if it's an eigenvector of P(T)
well, is it something like because P(T) are just composite functions in terms of T, so if it is an eigenvector of P(T), then v must be a eigenvector for each term in P(T), which are T's
Mathematics Stack Exchange
$\newcommand{\N}{\mathbb{N}}
\newcommand{\Z}{\mathbb{Z}}
\newcommand{\F}{\mathbb{F}}
\newcommand{\C}{\mathbb{C}}
\newcommand{\LM}{\mathcal{L}}$
Question: Suppose $\F = \C, T \in \LM(V), p \in \math...
plambda
thanks
For a, it is false right? I know that T is injective if A has a pivot in each column
But in the case of a 2 x 3 matrix, we have linear dependence
So it is not true?
And can someone help me with c also?
It should be true by definition but not sure how to exactly prove it
Anyone that can help me with this? He dropped the bomb when my professor uploaded it, I've no clue how to approach it at all xd
Ask yourself: What is a linear subspace?
Exact same question was asked above
- Must include the o-th vector
- Closed under addition, e.g the sum of two vectors a and b must be enclosed within this subspace
- Closed under multiplication, e.g the product of two vectors must be enclosed within the subspace
Must've been my friend, we take the same course xD
If the answer is in previous messages I can just revise those
Are you sure about 3?
Right. So if any of those are not fulfilled, it is not a linear subspace
As you have to explain your answers, they probably want you to show that you know that :P
:v
At best, I know surface-level theory around these
Idk the interactions that arise from the statements
Well can you express o in W_a?
What happens if you take 2 vectors of the form given in W_a and add them together? Can you rewrite the result that it looks like a vector as given in W_a?
If you take a vector from W_a and multiply it with k can you rewrite it to fit the from given?
I suppose?
Do it on paper or however you have to hand in your assignment. That's literally what they want to know. And if you can do all those things, you then have to compute a basis and figure out the dimension
Hi, I see on Internet that the GCD of two numbers a and b, can be compute using the Thomae's function, like
GCD(a, b) = a f(b/a)
But what is the Thomae's function for a and b with a, b ∈ N ?
thomae's function, for a rational number, computes a lowest-terms fraction p/q for b/a, then returns 1/q
in practice, this doesnt really help you compute gcds
since you still need to compute the lowest-terms representation of b/a
which is... basically the same thing as computing the GCD
Ok, thank you for your explanation.
I work on an exercise in algorithm, and in this exercise, I want to compute the GCD, but do you think there is a formula to compute the GCD easier than the Euler method ?
You mean euclid?
yes, sorry 😅
there's the binary GCD algorithm, which is faster than the euclidean algorithm, but harder to do by hand and to implement in an algorithm
if you want to compute GCDs by hand, the euclidean algorithm is about as good as you can do.
I m not going to compute the GCD by hand but with an algorithm... so you think binary gcd algorithm can be good ?
what are you hoping to gain out of this algorithm?
again, the binary GCD is faster
though the reduction won't be DRASTIC
up to 50% or so
so if the euclidean algorithm was gonna take 10 minutes, the binary algorithm wouldn't suddenly speed that up to something managable
How is that not drastic?
we're talking computational complexity here
where efficiency gains can often let you compute orders of magnitudes larger inputs in the same time
I 'want' an algorithm with the minimum time of computation (and if it's possible, with a minimum complexity)
I have only 3.45 sec to compute 784 GCD in the worst case
how large are your inputs?
...okay, then a lookup table is probably impractical
i think
in that case yeah, as far as i know you cant do better than the binary GCD algorithm
ok
i may be incorrect though, not a computer scientist
i know for really large inputs theres a more ring-theoretic algorithm based off lehmer's
but that's only faster after like, dozens of digits
ok
and its slower before then
ok, so I think the binary solution can be a good way
thx
??
No c_i is zero
@thorn lichen
Can someone please help with b?
Just use condition of linear dependence
not sure abou tthis
If A is the matrix which rotates all points by theta radians, then the inverse matrix undoes the transformation which a rotation in the opposite direction by theta degrees.
ok thanks
Or just row reduce till you get a row reduced echelon matrix
yeah drake that's the chump easy way out
imagine using row reduction when you could calculate a fuckton of subdeterminants
i am reviewing my teachers solution but i dont get how she got it
put the matrix into an augmented matrix with the right side being the identity matrix, then row reduce the left side into reduced echelon form
that should transform the right side into the inverse
a matrix has nonzero determinant iff the matrix is invertible
which part a is she talking about?
above, when she calculates the matrix for T in the basis of R^4
yes
does anyone know of a good resource to use for studying bases.... im in my first upper division linear class and was looking for something other than my textbook
she took the matrix, and calculated the determinant
are you confused on how to calculate a determinant
yes, but how did she get these numbers?
i put it into the calculator and they got this
yeah I'm unsure what she did to get that determinant
I got -4 using row reduction
regardless it's still nonzero
oh okay i seee
Can I get help with 5?
This is a sample exam btw thats why it has point numbers
What are the dimensions of the vector in R^2 thats being transformed?
Nathan(Shaw511/Damballah):
so this is gonna equal some 3x1 matrix
and thats our T?
yep got that
I just don't understand what any of this means lol
Nathan(Shaw511/Damballah):
oooh
so a=2 b=1, c=1 d=-1 e=1 and f=0
okay still kinda confused though
if the x_1 x_2 vector is in R^2
then what is the T matrix in?