#linear-algebra
2 messages · Page 96 of 1
I set an unkown matrix 2x2
and multiply it with A (which is 2x2)
The result has to be I
So X is the unknown matrix
AX = I
I get two separated ecuation systems
x,y,z,w
I would not be able to solve them if the A matrix could not be reduced to Gauss Jorda (or just Gauss)
So that proves me that if I system has 1 solution It can be reduced, meaning it can also have an A-1
If not it could not be reduced so A-1 would not exist
If you are simply interested in the 2-by-2 case...
Linear algebra began with the study of systems of equations. A natural question to ask is if the system has solutions.
For a 2-by-2 homogeneous system whose coefficient matrix is {{a, b}, {c, d}}, when you do row reduction, you get {{a, b}, {0, d - bc / a}}.
Can this be considered for any n*n matrix?
The system has a nontrivial solution if d - bc / a = 0.Another way to write this is ad - bc = 0.
And so our determinant appears. It’s called a determinant because it determines if the system has a nontrivial solution.
@eternal finch
Can use this also for any nxn matrix
?
no there is the rule of saurrus which works a bit like it
but else you have to use laplace to reduce the size of the matrix
What’s rule if Saurrus have to do with it? (Only remember how to apply rule, dunno where it comes from.)
Red could yopu please explain what you mentioned before ?
@gritty frigate You can arrive at the expression for the 3-by-3 determinant by applying the same method to {{a, b, c}, {d, e, f}, {g, h, I}}, but good luck finding one for an n-by-n matrix using the same method.
We are definitely back to "wtf is a determinant" again. I'd Google the "Laplace expansion" which is imo the easiest way to get the determinant of a matrix
basically a matrix is made up of two vectors v(a11, a21) and w(a12,22)
Yep
you can create a parallelogram
using those two
and the area of that parallelogram is a11a22 - a12a22
how do you relate the vector to the parallelogram ?
done
okay now should be able to draw a parallelogram with those two
with something like (1 0) (0 1) it just be a square, to give you an idea
Yep
wow.....
This is just amazing..
I undertand where you want to go to
Men
Math is just...
Gorgeous
Men...
...are savage creatures. Of which I am one. :^)
I'm not a man
get outta here fishy
How could they tell?...
that's exactly what a fish would say
A fish wouldn't say anything, actually
Proof I am man. >:)
don't fall for it, it's a red herring
If you are simply interested in the 2-by-2 case...
Linear algebra began with the study of systems of equations. A natural question to ask is if the system has solutions.
For a 2-by-2 homogeneous system whose coefficient matrix is {{a, b}, {c, d}}, when you do row reduction, you get {{a, b}, {0, d - bc / a}}.
The system has a nontrivial solution if d - bc / a = 0.
Another way to write this is ad - bc = 0.
And so our determinant appears. It’s called a determinant because it determines if the system has a nontrivial solution.
@eternal finch
Zoom zoom zoomy zoomer.
Zooming straight into your mom
😮
😄
i cant take this rollercoaster anymore
I dont speack english, what is row reduction ?
svensk?
It’s Gaussian elimination.
Or stuff similar to it.
Well, yeah, I mean, row reduction doesn’t have to be Gaussian elimination, I guess.
Anything that gets it in that triangular form via elementary row operations.
You're just using your elementary row operations
Right.
Wait what the fuck, why do you have that stupid looking fish in your profile picture lol
Prank
???
It’s not stupid...
It’s...
Well, it’s red.
And it’s a fish.
And I like red fish.
I like red fish too
Sometimes blue fish.
I often bathe my fish in the blood of my enemies
Very
Don’t get iron overdose.
Roflmaohahahahashofunny
Giddit???
Sheared sheep?
🐑
The range of a matrix
Is the number of equations that are not the same bethween them ?

|A| is the detemrinant of A ?
Yes that's typically used as notation for the determinant. det(A) is also used quite a bit
If a matrix is not nxn
Then it has no determinant
and can not be inverted
right
?
Determinants are not defined for non-square matrices
Matrix invertibility is not something that applies to non-square matrices. But that's something that can be understood without the help of the determinant
@gritty frigate If you want an elaboration on that, then just say so.
I understand dont worry !
Thanks a lot
You ve been very kind and helpful
What do you mean when you say "that is something that can be understood without the help of the determinant" ?
That means that you don't have to introduce the determinant in order to show that invertibility is a relevant concept only for square matrices.
Not Square matrix are not affected
It doesn't make sense to talk about invertibility with regards to non-square matrices.
tbf you can generalize matrix inverses to non-square matrices
at least in some form
Oh?
it's called the pseudoinverse
or moore-penrose inverse
at least that is the only way to generalize it, im familiar with
its used in like numerical methods
But it's not an actual inverse is it? It's something different from what we typically think of as inverses to maps?
ye, its different
like, you have to differentiate between left and right inverses for starters
due to dimension reasons
Ok yea that makes sense, i'll do some reading on it
I have a matrix A of size m by n. Say that m < n, then I compute the right pseudo inverse: A'(AA')^(-1)
How would I use the right pseudo inverse to solve Ax = b? I know that for the left pseudo inverse I can do the following:
Ax = b
A'Ax = A'b
x = (A'A)^(-1)A'b
(A'A)^(-1)A' = left pseudo inverse of A because m > n and A is full rank
What are the steps I need to follow to get the right pseudo inverse on the right hand side of Ax=b, such that:
x = A'(AA')^(-1)b
If you pre-multiply on the right hand side, shouldn't you also pre-multiply on the left hand side?

On a number of previous occasions, I have used the pseudoinverse of a matrix solve systems of equations, and do other things such as channel mixing. However, the demonstration I gave before isnR…
is there any expert I could tag here to get some help with my question?
Just leave it here and eventually someonle will asnwer it
I will give you my opinion
I think it should pre multiply as you mentioned, I dont think that the property is not valid for T matrix
But I dont know
shub just scroll up and you'll find people that talk about pseudo inverse
I did
still didn't answer my particular question
how can you get a right pseudo inverse on the right hand side of Ax = b?
@gritty frigate Well, you're trying to find values of x such that the determinant of the matrix is 0, right? I think using EROs to reduce it to an upper triangular matrix would be the best option. Then, you just need to multiply the diagonal terms
The process I linked is pre multiplying A' on right hand side but then multiplying A' in the middle on the left hand side. Is that legal in linear algebra?
?
Eh just explain yourself here I can use latex here to work through the math with you
@cursive narwhal any idea about my question?
How can I use latex ?
It'll also allow me to get rekt by other people if i say something wrong
It will make everything easier for me too
@gritty frigate it's not that bad if you take the 3x3 determinant shortcut
the x^3 terms and x^2 terms cancel out
It is pretty hard to express myself using english
It's okay, take your time. Which language do you normally use for math?
I have no idea what the deleted messages meant
@wintry steppe can you help with my question?
Shub, no i don't know anything about pseudoinverses because Loch just told me about them literally 30 minutes ago
It's okay, take your time. Which language do you normally use for math?
@cursive narwhal Spanish
Okay, DM me and I'll refer you to a friend who could potentially help you
Might be easier for you to do this stuff if a native speaker can guide you through it
your question is equivalent to finding $x$ such that $[(x+2)(x+3(x+4)+x^3+x^3]-[(x+2)x^2+(x+4)x^2+(x+3)x^2]=0$
Botnuke:
which is an easy problem, as all the x^3 and x^2 terms cancel
This is amazing
I have a class now, as soon as I finish I will contact you guys
Thanks !
Lol dafuq alright
can anyone tell me how to get right pseudo inverse to solve Ax = b
your question is equivalent to finding $x$ such that $[(x+2)(x+3(x+4)+x^3+x^3]-[(x+2)x^2+(x+4)x^2+(x+3)x^2]=0$
@wintry steppe You arrived there finding the determinant ?
AfterJack:
yes, do you know the shortcut for finding 3x3 determinants?
just googled it
yea, that's apparently the name for it
if you simplify that expression, it reduces to 26x+24=0
so you have your x
I learned matrix 3 days ago so I have some basic thins to learn
things
What meas if the det(a) = 0 ?
Means
do you agree that the determinant of your matrix is equal to this? $[(x+2)(x+3(x+4)+x^3+x^3]-[(x+2)x^2+(x+4)x^2+(x+3)x^2]$
Botnuke:
I do
the question is to find an x that makes the determinant (which can be written as the above expression) 0
so set that equal to 0
and solve for x
it simplifies to 26x+24=0
in other words
if you substitute $x=-\frac{12}{13}$ into this matrix https://cdn.discordapp.com/attachments/540211747613704221/712417807668740156/jk.png

the determinant is 0
I know what is happening
as I mentioned I learnt matrix 3 days ago
i know this :
If a matrix is 2x2 then if det(a) = 0, the system has no solution
wait
I will send a picture
<@&286206848099549185> please answer my question. I want to know how we can get right pseudo inverse on the right hand side of Ax = b
whats the problem?
It happens JUST for 2x2 matrix ?
no
part 1) is true for all square matrices
^
Part 2) is true for all square matrices of size 2 
well, the formulas become not simple
it happens to be the case that there is that easy one for 2x2 matrices
but inverses of larger matrices are much more tedious to find
Laperace Theorem to find the determinant ?
yea
of an N dimension matrix
or cofactor method, whatever it's called
You mentioned earlier that I should find the values for x, such that x is equals to 0
What happens when det(A) A3x3 = 0 ?
do you mean like, why does anyone care about whether or not a matrix has a 0 determinant or not?
So I should assume that the right pseudo inverse cannot be used when Ax = b?
because I can't seem to find any proof of it online
everyone is deriving the left pseudo inverse but no one bothers with the right pseudo inverse
Can someone explain to me what the highlighted statement means?
@wintry steppe maybe that could asnwer my quesiton
It means that the vectors in that set are not mutually orthogonal
So the inner product of any two vectors is not 0
yea, take the dot product of f2 and f3
and see what happens
it turns out that a whether or not a matrix has a determinant or 0 or not says a great deal about the matrix
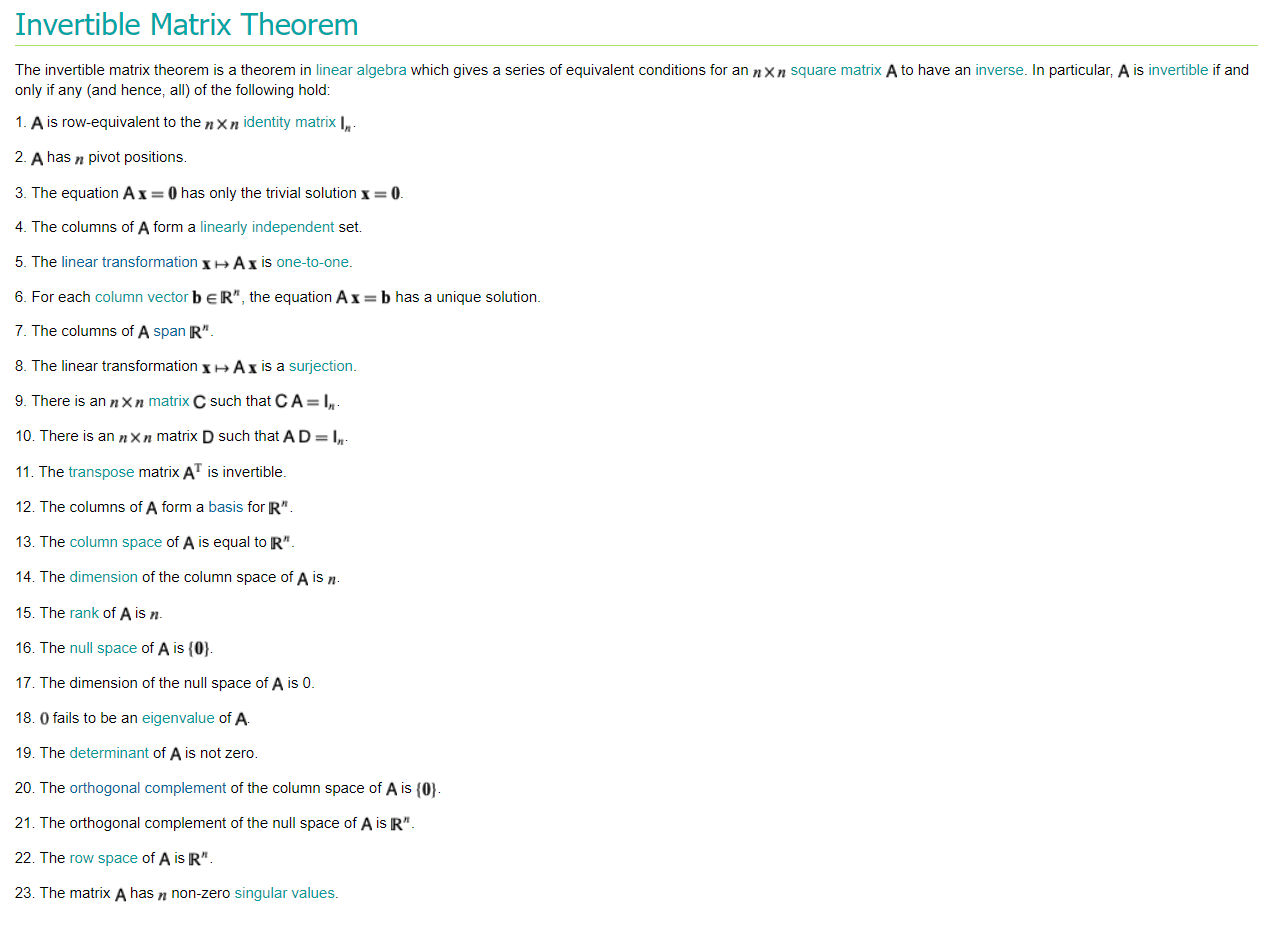
https://i.imgur.com/IJRLSKl.png for example, if the determinant of the matrix is nonzero, then all of these 23 properties hold
@hexed steeple In this case, they're referring to the canonical inner product on R^3, I'd assume.
you probably don't know what most of these things are, but that's fine
@cursive narwhal that makes a bit more sense
for now, just know that a nonzero or zero determinant tells many useful facts about the matrix
@wintry steppe I've learnt about most of those properties except how they tie to orthogonality. My text book hasn't shown me that part specifically yet
oh I was talking to the other guy
oh lol
That is about a matrix which det is different from zero
What happens if zero is the det of A ?
if the determinant is 0, then all of those properties DONT hold
which is also useful information
if the determinant of a matrix is nonzero, then all of those hold
if the determinant of a matrix is zero, then none of those hold
yeah all of these are if and only if statements
so if one of them holds, all of them do
and if one of them doesn't, none of them do
Okey I get it
It means that the vectors in that set are not mutually orthogonal
@cursive narwhal So the gram-schimdt process does not make any/all of the vectors mutually orthogonal but orthogonal relative to the next vector?
thats what I deduced from the gram-schimdt process
uh, all vectors should be mutually orthogonal
Gram-Schmidt Orthonormalization is a process that forms an orthonormal list of vectors
after you apply the process
the question is to find an x that makes the determinant (which can be written as the above expression) 0
@wintry steppe But why this
@hallow cliff thats what I thought but now I'm confused
it seems like that was just an exercise to build your understanding of how determinant calculations work
why you do want to know the value for x such that det x = 0
I don't really have an answer for that
You see, you can define multiple inner products on a given vector space
So the vectors may be orthogonal with respect to one inner product
But not with respect to the other
Ah I see
So for example, the canonical inner product on $\bR^n$ takes two vectors $x,y \in \bR^n$ and defines:
$\langle x,y \rangle = \sum_{k=1}^{n} x_k y_k$
Where $x_k,y_k$ are the components of $x$ and $y$.
Abhijeet Vats:
But you can certainly define other inner products.
@cursive narwhal Thanks!
can someone help me with a hw problem?
i think i have got it but im not sure, so a matrix is 3 * 2019 and b is 2019 * 11 and c is 3 * 11 and C^tAD is 11*2020 and D^tBC^T is 2020 * 3, the size of d would be 2020 x ?
also one more thing if a equation is built like this (4BA^-1D)^-1 also equals to 4^1B^-1AD^-1?
I cant understand this for the life of me is anyone able to help me break it down
how do you read A subscript(j,k) am I suppose to assume thats a matrix? The author never makes it clear what he is refering too
So we just dont know the dimensions of F
and this is a way to say what dimension A is in?
so its just a sum over elements running over all "pairs" of values from 1 to m and 1 to n
uhh
A is an element of F so it doesnt have a dimension
its... a scalar
ohhh
so A1,1 would be adding to the first element of the first vector?
wait no that doesnt make sense
so its just a sum over elements running over all "pairs" of values from 1 to m and 1 to n
what do you mean for pairs of values i guess
lets say m = 3, n = 4
then there would be 12 different As
$A_{1,1} A_{1,2} A_{1,3} A_{1,4} A_{2,1} \dots A_{2,4} A_{3,1} \dots A_{3,4}$
Namington:
the reason they separate this into ms and ns is that
each A_m,n is paired with an x_n
based off its n value
well should i say
each A_j,k is paired with an x_k
but yeah
uh let me be more explicit
this would be $(A_{1,1}x_1 + A_{1,2}x_2 + A_{1,3}x_3 + A_{1,4}x_4, A_{2,1}x_1 + A_{2,2}x_2 + A_{2,3}x_3 + A_{2,4}x_4, A_{3,1}x_1 + A_{3,2}x_2 + A_{3,3}x_3 + A_{3,4}x_4)$
er
whoops
Namington:
its a vector
its kinda ugly in that format, let me write it as a column vector
$\begin{pmatrix}A_{1,1}x_1 + A_{1,2}x_2 + A_{1,3}x_3 + A_{1,4}x_4\A_{2,1}x_1 + A_{2,2}x_2 + A_{2,3}x_3 + A_{2,4}x_4\A_{3,1}x_1 + A_{3,2}x_2 + A_{3,3}x_3 + A_{3,4}x_4\end{pmatrix}$
Namington:
why is the first entry A1 instead of 1x1+A1
so $T\begin{pmatrix}x_1\x_2\x_3\x_4\end{pmatrix} = \begin{pmatrix}A_{1,1}x_1 + A_{1,2}x_2 + A_{1,3}x_3 + A_{1,4}x_4\A_{2,1}x_1 + A_{2,2}x_2 + A_{2,3}x_3 + A_{2,4}x_4\A_{3,1}x_1 + A_{3,2}x_2 + A_{3,3}x_3 + A_{3,4}x_4\end{pmatrix}$ for some family of scalars $A_{j,k}$ where $1 \leq j \leq m, 1 \leq k \leq n$
Namington:
ah
using "scalars" here is kind of incorrect
but close enough
"elements of the underlying field" would be more correct
(for example, the vector space R over the scalar field Q would admit entries from R but not scalars from R \ Q)
oh lol
dont worry about it here, in this context youre working over F^n
i just realized
so it doesnt matter here
ok
thank you
im going to spend some time trying to get my head around why that is a form for every transformation
but yes
if youre asking "is A_j,k a matrix"
the answer is "kind of"
they're entries in a matrix A
normally this result is phrased in terms of matrix multiplication
where $T(v) = Av$ for your vector $v$
Namington:
if you create a matrix $\begin{pmatrix}A_{1,1}&A_{1,2}&A_{1,3}&A_{1,4}\A_{2,1}&A_{2,2}&A_{2,3}&A_{2,4}\A_{3,1}&A_{3,2}&A_{3,3}&A_{3,4}\end{pmatrix}$
Namington:
you should be able to see the connection
so, this theorem motivates the definition of matrix-vector multiplication basically.
@ocean sequoia if that helps clear it up
Anyone can explain why the eigenvectors generated by an eigenvalue must necessarily be lin indep to eigenvectors generated by another eigenvalue?
If v_1 and v_2 are eigenvectors of T corresponding to distinct eigenvalues k_1 and k_2, then what can you say about their linear dependence?
First, you look at the equation a_1 v_1 + a_2 v_2 = 0.
You can apply T to the equation to get a_1 k_1 v_1 + a_2 k_2 v_2 = 0.
Eh, but the pictures are so big lol
Maybe I should use brackets.
a[1] v[1] + a[2] v[2]...
No, that's worse.
Ok, I will prep the proof first, then.

Mathematics Stack Exchange
How can I prove that if I have $n$ eigenvectors from different eigenvalues, they are all linearly independent?
@wintry steppe First answer.
Ha ha, I knew somebody else would've done it directly.
Most recent book I've read, Axler, does it by contradiction.
Thanks for the help
If we let x€R^n a non-zero n-vector and A = zz^T.
Is the null space of A is 1 and rank of A is also 1?
I think like that because A will be just a real number. We can express any real number multiple of 1.
What's z?
Correction:
If we let z€R^n a non-zero n-vector and A = zz^T.
Is the null space of A is 1 and rank of A is also 1?
I think like that because A will be just a real number. We can express any real number multiple of 1.
By R^n I mean a column vector
Ok, so z is n-by-1, yeah?
Yeah
And z^T is 1-by-n.
Is € the poor man's ∈
Hence, A = zz^T is what-by-what?
Doesn't R^{1, n} usually mean one row and n columns?
That would make z a row vector.
What will be a row vector * its transpose ?
A number. However, you said at the beginning that z was a column vector.
My mistake
As in z is a column vector, or z should be a row vector?
If z was meant to be a row vector, then A = zz^T would indeed be a number. If z is not 0, then zz^T would indeed be a multiple of 1, and the rank of A would be 1.
However, the nullity would not be 1. Remember that the rank and nullity of a matrix add up to the number of columns.
Thanks a lot
Is $span((1, 0), (0, 1)) = \bR^2$ because you can represent every element in $\bR^2$ with those two vectors like $(3, 4) \in \bR^2, (1, 0) * (3, 4) + (0, 1) * (3, 4) = (3, 4)$ ?
or am I understanding this wrong
because $span(M)$ is also defined as the "smallest subspace that contains M" and I don't really understand that definition
So, let's start with the definition of span.
The span of a list of vectors is the set of all linear combinations of those vectors.
So, if you have two vectors u and v, then their span is the set of all vectors of the form au + bv, where a and b are scalars.
Now, what's a subspace? It's a subset of a vector space that's also a vector space.
Suppose you wondered what a subspace that contained u and v looked like.
Well, by virtue of being a subspace, the subspace contains all linear combinations of u and v.
This is because (1) if a vector space contains x and y, then it contains x + y, and (2) if a vector space contains x, then it contains all vectors ax, where a is any scalar.
A subspace containing u and v could have more vectors than the linear combinations of u and v, but it must at least have those linear combinations.
This is why we say the span of M is the smallest subspace that contains M.
Coming back to your first question, is R^2 the span of (1, 0), (0, 1) because you can represent every element in R^2 with those two vectors?
Yes. More precisely, R^2 is the span of (1, 0) and (0, 1) because you can write any vector in R^2 as a linear combination of (1, 0) and (0, 1).
Your example, btw, would be (3, 4) = 3(1, 0) + 4(0, 1), which is a linear combination of (1, 0) and (0, 1).
Thanks a lot. You basically summed up what I had to learn in the last week, but now I feel like I understand it
Maybe I should get a book about this, because the examples of my prof are quite difficult to understand
I don't know if he's doing it on purpose or not
What a helpful fish
I need help:
Let V be a finite dim. vect space, A in End(V) fixed.
Define: P_A = {B in End(V) | AB = 0}
Need to show that P_A is a subspace of End(V) (not so hard) and that every subspace of End(V) can be obtained that way.
The second part is a problem.
My line of thinking is, "how can I find some A such that AB = 0 for every B in M, M subspace of End(V)", but no clue...
hello, I have one question: if we know that a matrix A is an invertible matrix and that A is not an identity matrix, is it possible that we have A is the same as its inverse? if so, can you give an example?
$\mat{0 & 1 \ 1 & 0}$
Ann:
'A is not an identity matrix'
this is not the identity
yes this is an example of a matrix which is not I but equals its own inverse
@golden cloak did you get it?
@pale coyote no
can i see your original problem again cyber
What is the geometric interpretation of a row vector
@dusky epoch
cybergnosticToday at 3:55 PM
I need help:
Let V be a finite dim. vect space, A in End(V) fixed.
Define: P_A = {B in End(V) | AB = 0}
Need to show that P_A is a subspace of End(V) (not so hard) and that every subspace of End(V) can be obtained that way.
The second part is a problem.
My line of thinking is, "how can I find some A such that AB = 0 for every B in M, M subspace of End(V)", but no clue...
@golden cloak Fix a basis for $M$ and think of how the rows of $A$ would have to be related to the columns of the basis you chose
moonside:
hang on i'm not even sure if that's the case
take V = R^n and take the subspace of End(V) composed of diagonal matrices
suppose there exists a matrix A such that AB = 0 iff B is diagonal
from that you get AI = 0 since I is diagonal
but then that means A = 0
which means AB = 0 even for non-diagonal B
contradiction
so you're asked to prove a false statement
lul
if it means something, the b) part of the question is,
show that F_f : End(V) --> End(V) defined by:
F_f(g) = fg, g in End(V) is linear, and that every linear operator from End(V) can be obtained that way
it would be preferred to do that without matrices, because this question is from lectures before notion of matrix of a linear transformation
If I put two elementary operations into one matrix will it do both or should I multiply both elementary matrices for that
Uh...how are you putting them into one matrix?
Why is {v1,v2} a correct response?
My understanding is the other two are correct since they are dependent on v3
 why {v1,v2} as well?
why {v1,v2} as well?
$v_3 = -2v_1 + 3v_2$
Lochverstärker:
what does "dependent on v3" even mean
@sick dragon If you're still not very sure, then just note that a basis for any vector space is just going to be a linearly independent list of vectors that spans the space. So, Loch showed that v_3 can be expressed as a linear combination of v_1 and v_2. That, incidentally, also shows that v_1 can be expressed as a linear combination of v_2 and v_3 and the same applies for v_2 as well.
If I can express one of the vectors in a list as a linear combination of the other vectors in the list, then that list is linearly dependent
Thank you
You're welcome (even though Loch did most of the work)
hallo
ich kann kein deutsch.
ok no problem 🙂
do you have any ressources where i can see what is the verfahren
sorry i didn t know the word in english
no worries
i feel like i missed something, why is this the case
You can try proving it or disproving it
It's an assertion. You know what a subspace is supposed to be. So, work with that.
Let $b = 0$. Then, you need to prove that the given set is a subspace of $\mathbb{F}^4$. That requires you to check that it's non-empty, that it is closed under addition and that it is closed under scalar multiplication. I'm also assuming that the underlying field over here is just $\mathbb{F}$.
Then, for the other direction, suppose that the given set is a subspace of $\mathbb{F}^4$. Then, you need to show that b = 0 in that case.
Abhijeet Vats:
@nocturne oracle Let me know if you have any issues, yea?
yeah im just confused, is x3 analogous to u, or is (x1, x2, x3, x4) analogous to u
U is the whole second line in the earlier image, right?
Indeed, U, in your specific case, is just the set:
$$U = {(x_1,x_2,x_3,x_4) \in \mathbb{F}^4 : x_3 = 5x_4 + b }$$
Abhijeet Vats:
$(x_1,x_2,x_3,x_4)$
Abhijeet Vats:
That's the vector u
yeah alright
how to know if there is a unreduceable row echolon form for a matrix using the the gauss elimination?
so after u reach the first form
is there a way to know i can go to the second form
I don't understand the question
are you asking how to go from the first to the second matrix?
no my question is there a way to know there is a streng Zeilenstufenform for a matrix
row echolon form
in english
you'll see if you can't go any further
oh ok thanks
It's like a powerup for an anime character or something of a final form
"Now, I shall show you the power of my Streng Zeilenstufenform."
haha yeah it feels weird saying it i'm not german neither
i study in german i m tunisian
No u
dude wtf
My brain is weird, ignore me
o///o
don't make me get my strenge Zeilenstufenform
Is that the name of the bdsm whip you have lol
lochverstärker is the kind of bdsm u looking for xD
i know what each word means but combining them doesn't make sens to my tiny brain
it's ok, i didnt know what strenge Zeilenstufenform is either
It's my final form
if you were my professor and i filled 2 pages with this jordan decomposition
just for the factorization to be wrong
would you still fail me
anyone
please
well that depends
did you just put down random calculations or did you explain what was happening?
no BRUH
BRUH
I did it over 3 times
to find the generalized vector
@torn silo but to find it you have to go through trial and error
where you have to pick which vectors man
like i did it 4 times
its tiring and i have 12 other fucking questions
I dont know anymore
what do you mean bruh
jordan matrix no trial and error
you take one of the vectors that isnt a linear combination of the vectors in the previous kernel
we talking about the same thing bro?
where i have to match the fucking jordan matrix
to the original one bro?
using the column vectors
as the fucking
Q matrix or whatever
to multiply them
IGHT WHATEVER man. I'll just hold my F
fuck my life
BRUH BREEEH
if you're still there can you show me an example
Use the definition of matrix multiplication and transpose.
See what the (i, j)-th entry of B^t A^t is.
Yes, that's right. AI = IA.
Also, for the $B^t A^t$ problem, what I mean is use the formula $(AB){i, j} = \sum{k = 1}^n A_{i, k} B_{k, j}$.
Thanks !
Red Herring:
So finicky, @.@
yes
find a numerical example where this is not true
ye
so it's really your choice to use anything you want
A= (0,1), B= (1,0)
how do we prove a set is a base of a vector space ?
how do we prove a set is a base of a vector space ?
A basis is a linearly independent list of vectors that span the space. All bases have the same length, which is the dimension of the space. It is sufficient to prove that a basis is linearly independent and has a length equal to the dimension of the space or that a basis spans the space and has a length equal to the dimension.
nice thanks !
@narrow mortar i don't know, is it?
@eternal finch this one is giving me troubles bc idk how to measure the length of the first vector space
a vector space
i mean duh but what vector space is it
the DIMENSION of U, if that's what you meant, depends on what V is
what do you mean not known
i meant dimension not length sorry
it should be given in the problem
otherwise it makes no sense
because V cannot be just any arbitrary vector space
did you look above
but u can see it's not specified
did you look above
THERE WE GO!
sorry
so i need to find the dimensions of b
and prove that it's lin independent
the dimensions of b
no
there's no lowercase b, and uppercase B is not a vector space and so doesn't have a dimension

i see
you need to show two things
- B is linearly independent
- for every f ∈ U there exist constants c1, c2, c3 such that f(x) = c1(x^2-1) + c2(x^3-4x) + c3(x^4-1)
hmmm ok thanks a lot fo ur time
i actually have read the script from my uni and another book
so much stuff to learn
i need to connect the stuff in my teeny tiny brain
hey can anyone help some intro to linear algebra questoins?

Having X-1
Beaing that an inverse matrix
how can I get the value of the origignal X?
Yep
$X = (X^{-1})^{-1}$
Ann:
yes
How can I dot it if it is an equation ?
??
How can I learn to use latex ?
#resources, stackexchange, https://www.overleaf.com/learn
$X^{-1}=M^{-2}(2N^{t}+I) $
AfterJack:
Do I have to solve all and then apply the property
Or can I something on both sides ?
I dont know if the expression on the left has inverse
So I will not keep the equality

But I should do it in both sides
and I dont know if the left side has its inverse
I just know X has
and it is an 2x2 matrix
if 2N^T + I has no inverse then the equation cannot be true no matter what
since X^-1 is invertible by definition
its inverse is X
so 2N^T+I is forced to have an inverse
You are right
It MUST be inverso
Inverse
I m making a lot of stupid questions
If not then the left side is not equial to the right side
However, there is no point in doing that. I should first solve and then do X-1-1
I will be doing one more inverse if I do it applying the operation to both sides
@pale coyote y you make fun of the way i speak
@torn silo I was trying to freaking decompose A into QJQ^-1 (dont know latex) here's the freaking example. Doesnt matter anymore i guess
So, say you have two vectors u and v.
They span some subspace.
Does their span change if you change the magnitude of the vectors but not their direction?
You mean a V2 in the direction of W2?
No
V1 was already defined to be a unit vector in the direction of W1, tho.
So I let V1 be in dir W1
Find V2 in directions of W1 (which is zero) and W2
W1 = (1, 1, 1, 1), which is not 0?
Also, what does it mean for V2 to be in the directions of W1 and W2? A vector can only point in one direction.
Shouldn't V2 dir W1 be zero because it is orthogonal to W1
That's a different assertion than you made previous. Ok, so you say V2 should point in the direction of W1 and should equal 0 because it should be orthogonal to W1?
Ok, so you say V1 points in the direction of W1, and V2 is orthogonal to it.
Yes
Sure. Then, V1 and V2 would span the subspace spanned by W1 and W2.
That's part of what you want.
Your original question was "how does finding V1 in the direction of W1 helpful"?
How do I do t of an square matrix ?
Now you know.
Thanks @eternal finch
And you also know a bit about V2.
Np.
How do I do t of an square matrix ?
t?
Transpose?
Say A is a square matrix.
Take the first row.
Write it as the first column of your new matrix.
Take the second row.
Write it as the second column of your new matrix.
Etc.
At the end, you get A^t as your new matrix.
👏 🥳 👏
Congratulations! @real plaza
based
6 and -6 are the eigenvalues
but once u try to find a nontrivial solution for (A - -6I)x = 0
you cant
no
remember that the vector also has x2
and x2 does not appear in any equations
and therefore there are no restrictions on it
oh so for it to be trivial x1 and x2 has to be both zero?
yes
so x2 here is a free variable
oh now i get it
how were u able to do it that fast?
u have a special calculator or something?
r u a mathematician?
degree?
i have a calculator that gets the reduced row echelon form in 5 seconds
imagine having to reduce every problem
i have a browser and several websites that gets rref in less than 5 seconds
well yeah u can say less than 5 seconds
it just requires noting that
-6 + 6 = 0
since this means that the entire second column of the matrix is 0s
i'm not sure why you took this in the direction of a tangent against row reduction
i'm just pointing out that
this didnt require it
this matrix was small enough for mental calculation to be an option for me
yeah i know
because of how matrix multiplication works; if you have a 0 column, then clearly multiplying by a vector on the right will "eat" one of the entries in the vector
r u guys math majors
kind of.

yeah, i'm pretty sure everyone's seen that video
i have not

So, counting is a very natural thing to do. One apple, two apples, three apples.
And you can define rules on how to combine quantities.
Two apples plus two apples equals four apples.
And eventually, you realize that, for example, two of anything plus two of the same thing equals four of that thing.
So, you abstract and work with those counting words instead of the original items.
Numbers.
Is there an analogous way to describe vectors?
The first thing I would do is say that there's a lot of things you just can't describe with one number.
For example, displacements in two dimensions.
But a vector very much depends on the reference objects.
Like, for example, the quantity "two miles north and three miles east".
That's the same quantity as [choose your change of basis and insert vector above in new coordinate system here].
Btw you can get the norm of a vector with cross product right?

I'm beanboozled.
Working on this problem
Not sure how I'm supposed to approach (a)
I assume O is some scalar?
OR = (1 - t)OP + tOQ = OP - tOP + tOQ?
Maybe I should ignore O?
r = p - tp + tq?
(1, -2, 0) - t*(1, -2, 0) + (4, -5, 6) = (3, 4, 4)
I wonder what happens if i just keep algebraing
r = p - tp + tq
r - p = - tp + tq
r - p = tq - tp
r - p = t(q - p)
(r - p)/(q - p) = t?
Then everything would be zero?
rip, i don't think vector divison exists.
Well if its OR, would be (0, 0, 0) (3, -4, 4)
Hmm not sure.
Not sure, I assume its just a point.
Just another interpretation of a vector, I assume?
Well, I think it could be interpreted either way.
Assuming the point originates from 0.
Oh weird..
So maybe its just a fancy way of saying it comes from the origin?
I guess, I thought in general the ideas were interchangeable as long as the vector didn't have some arbitrary origin.
From a textbook I'm using
Aight, thanks for the help tho!
let's say we have two subspaces U1 and U2 from V
i want to prove that the sum of two vectors one of each subspace is in U1 U U2
is that possible ?
so u mean add v1 + v2 +v1 -v1
and work from there ?
i don't get your point ethan sorry i m still a beginner
ah sorry i didn't post the exercice's question: We have two subspaces U1 and U2 of V. i need to prove U1 U U2 is a subspace of V if and only if U1 C U2 or U2 C U1
it's not about proving that U1+U2 = span(U1 union U2)
it's with a line underneath haha idk really
yes
i know the steps
i'm stuck at the part at where i need to prove that the sum of two vectors in U1 U U2 is in the subspace
oh so the condition i start with is that U1 C U2 or U2 C U1
i started out with only U1 C U2
yeah i didn’t know how
i ve split the work in 3 cases
i ve sent a pic
the third case is the one i m having troubles with
oh yeah makes sense thanks a lot !!!
have a great day my friend
but U1 has to be in U2 alread
y
otherwise it wont work
the union of a subspace means you just stuff those two subspaces together
ahh okay
otherwise youd have something like the subspace generated by (1,0,1) and another one by (0,1,0) but (1,1,1) isn't in the union even though it can be created by addition
Hi guys, I'm trying to understand what this equation is expressing. Some symbols I understand (sum, capital pi) but its mainly the zj < zi I don't quite understand what it really means https://i.imgur.com/MTjNaBK.png
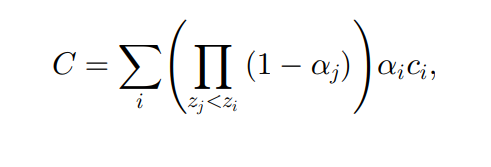
First term is sum of all i and I think the capital pi is the product of all i and j which is multiplied by the 1 - omega multiplied by j (not sure if that symbol is omega)
Is the zj < zi just saying when j is less than i?
I have mostly no idea what that means, but the symbol is alpha
And I'm fairly certain that means multiply all values for j that are less than i
Ah ok
Yes, that makes sense. This is for computer graphics and is basically talking about a very common operator called over that is used to blend pixels of a screen together for a final colour output
Here is how it is normally displayed https://i.imgur.com/FAsvNUi.png

Oh yeah, then it's basically telling you to do a for loop
Computer codes I do understand
Ok it makes sense what you said about multiplying all values for j that are less than i
(or at least that'd be by guess)
Yeah, probably
Does it specify ever that i and j are naturals?
It doesn't go into much detail other than the fact that the first expression is basically refactored from the second expression I sent
I guess its a more compact form as opposed to explicitly writing a1 x c1 + (1 - alpha1) x (a2 x c2 + (1 - alpha2)) ...
Thanks for your help man! I kind of understand what's going on now haha
I'm assuming this is the right place to ask for 3D vectors
There's a thing called vector exclusion
They're sort of like the opposite of the dot product
vxcl(v1, v2) returns v2 with no component in v1
So say I had a velocity vector called V and I wanted to get the horizontal velocity of it, if I have an up vector
I could just do vxcl(up, V)
Right?
Yeah, probably what it is
Thanks, I'm just kinda new to 3D vectors and what you can do with them
Implement orthogonal iteration and calculate the six largest eigenvalues with an absolute tolerance of 10−6
. Use the MATLAB command for "exact" eigenvalues. Karte
so p = 6 and take as X0 the first six columns of the unit matrix. How many iterations are needed?
n = 13;
R = 'S';
G = numgrid(R,n);
spy(G)
title('A Finite Difference Grid')
https://gyazo.com/d3da6039c48fee3f315dd1d8347a3eab

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
i have no idea of how do this? any ideas?
can changing the constants of a system affect its original rank?
yes
i have a question about a matrix multiplication type of task
A is a 3 x n matrix and E is
How can you create matrix EA from A with just this?
according to the solution, it's
"by adding 2 times row 3 to row 3"
but i don't see how that solves the problem
I assume A is your identity?
1 0 0
0 1 0
0 0 1
@vapid copper
Take the third row, add it to the second. That's an elementary operation so you can do that.
@half ice no it isn't, necessarily
the task just states that it's a 3xn matrix
nothing about identities or anything
that's why i dont understand
Do you happen to have a pic of the task?
yes however it is in danish
"Let A be a 3 x n matrix and let E be the matrix E = ...
How does the matrix EA appear from A?"
the crossed answer states "By adding 2 times row 3 to row 2"
what about it?
like what does it mean
do you understand limits of sequences?
um i guess not?
does it just mean the set of all convergent series?
or sequences rather
sequences that converge to 0 specifically
are they not equivalent
oh yea
so here youre considering sequences $(a_1, a_2, a_3, \ldots)$ for which $\lim_{n\to\infty} a_n = 0$.
moonside:
wait, so they dont necessarily have to be sums?
like you could have (1,0,0,0,.....)
converges to 0
dont confuse sequences with series. A series is an infinite sum, and you actually define what convergence of a series means by examining the convergence of an associated sequence (the sequence of partial sums)
yes thats what i mean, like the i th term of a series corresponds to the i th term of its sequence
but you could also have sequences such as (1,0,0,0.....), which satisfy the limit property, no?
A series $\sum_{n=0}^\infty a_n$ as two associated sequences: 1. The sequence of terms, which is just the list of the individual things youre adding $(a_0, a_1, a_2, \ldots)$ and 2. The sequence of partial sums $(S_0, S_1, S_2, S_3, \ldots)$ where $S_N = \sum_{n=0}^N a_n$
moonside:
oh yeah
Here we are dealing solely with sequences though
ok right
well so if we have the two sequences S1 and S2, with both limits of 0, S1+S2 must also have a limit of 0 as well, right?
and multiplying S1 by a constant wont change the limit, so the limit is still 0.
but how do I show 0 is an element?
just use the S1 + (-1)S1 = 0?
or does that not work because these are sequences
@half ice Sorry for disturbing, but did you ever figure it out?
You need to define what the 0 element in the space of sequences is
wydm by 0 element
oh yeah
um is it just the sequence of 0's? but that doesnt really make sense
(0)?
why doesnt it make sense
how can the number 0 be an element {the list of sequences with limit 0}
like all of the elements are of the form $(a_0, a_1, a_2, \ldots)$
Sideurk:
it cant
you need to define an element of your space (i.e. a sequence that converges to 0) which acts as the 0 element
Sideurk:
yeah, you just have to check that this acts like a 0 element should
well i suppose you need to define what the operations in your candidate vector space are (+ and scalar mult)
these are all kind of obvious, but still good to be explicit
ok I feel dumb now, so the "0" isn't necessarily the number 0, but it just has to act as the additive identity, correct?
well even in something familiar like $\mathbb{R}^3$, the 0 element isnt the number 0
moonside:
yep
gotcha, thx for being patient
my pleasure
because x + y := y apparently
Show that U +W has dim 3
Sorry for the danish text, but I'm trying to declare rule here in Maple. (new here, let me know if it's not the right place)
What am I doing wrong?
left: the assignent
right: Maple
oh ok, thx
So F^3 is the direct sum of U and W because each element of U + W can only be expressed as ( x, y, z)?
"can only" is a weird way to say this lol
U + W are vectors of the form (x,y,z) which is F³
I agree, the wording is wierd
Oh I see your question haha
Every vector in U + W requires a unique choice of U and a unique choice of W
Like, I get that each vector ( u_i, u_j, u_k) is unique because like U can only change the first two points and W can only change the third
But if W was like {( 0, y, z) in F^3}, then each point ( u_i, u_j, u_k) would not be unique
because the u_j is then dependent on two variables., right?
and in that case F3 would not be the direct sum of U and W
Yeah, that's right.
Can I get a hint on how to deal with f'(-1) = 3f(2)? its my first exposure to this type of equation
First, how do you tell if a set is a subspace or not?
closed under addidtion, scalar mult, and 0 is it
I mean in general.
um, if u_1 + u_2 is in U
if two elements of that set added remain in that set