#linear-algebra
2 messages · Page 74 of 1
is there a 2-dimensional version of this?
I'm trying to write an algorithm for a perspective change
like a camera in 3D space
working my way through it on pen and paper I figured out that I would need to translate the origin to the point the vector of the camera is pointing to
and apparently this is the way to do it and I can't figure out why
yeah
well how it works is pretty much the same in both cases
you have to add a 1 to the end of your vector in 3D to make it into the 4D one you'd use in homogeneous coordinates @wooden forum
$\begin{bmatrix}1&0 & v_x \ 0&1 & v_y \ 0& 0 & 1 \end{bmatrix}$
Merosity:
you could put something else other than an identity matrix there
just multiply by a regular vector with a 1 at the end, (x, y, 1)^T
I'm trying to think about it as moving the vector 1 unit up into the next dimension
theoretically if 2 points in addition to the point of the "camera" fall on a line, then those 2 points would be represented by the same point after the matrix multiplication
but I don't understand how that would work
You can think of the "starting position" as it's own dimension
it's kind of like what you're saying yeah @wooden forum
it's really not super important though so long as you can see it works
the basis vector for the new dimension would be based not at the origin, but at the point the translation vector is pointing to right?
$\begin{bmatrix} A & \vec v \ \vec 0^T & 1 \end{bmatrix} \begin{bmatrix}\vec x\1\end{bmatrix} = A\vec x + \vec v$
Merosity:
here maybe this helps to see
you can think of it more as a trick to turn translation into a linear operator
so I guess trying to picture it wouldn't work
like you can, you basically just described it earlier
but thinking of a translation in 3D as a kind of sliding along some surface in 4D isn't really that exciting if you're just trying to make a simple program to translate vectors
it's more just a handy trick
if you want, work out what the translation matrix should be for 1D which would be a 2x2 matrix
that way you can draw it out in its entirety to better understand that
I'm writing a library in javascript to create 3D graphics and draw them on a 2D HTML5 canvas
it's a bit ambitious of a project considering I don't have a good handle on linear algebra
but I thought I'd learn through it
that's a good plan
It's how I learned programming so I figured it would work for math :P
you can just add vectors to translate them though
Oh, yeah I can see that now.
I guess you can try to prove that translation is not a linear operator
ooooh
that would give some insight to why we have to do this roundabout way if we were really hell bent on forcing translation into a matrix operation
I will think through it, thank you very much!
so yeah try to do it, check the axioms show me that translation is not linear
Ok
well first thing that popped in my head is that linear functions have no constant term
and in order to translate a function you add constant terms
Merosity:
try to break like $T_{\vec v}(\vec x + \vec y) = T_{\vec v}(\vec x) +T_{\vec v}(\vec y)$ or $T_{\vec v}( c\vec x) = c T_{\vec v}(\vec x)$
Merosity:
something to that effect was what I wanted but to be fair what you said is not wrong
so I guess you proved it and are free lol
you're welcome
watched 1 3blue1brown video and now eveything we've done in my linalg class makes sense
I would say it's because 3b1b gave you a big picture of what's going on and connected all the small seemingly disconnected pieces that are taught in your lin alg class
Meaning if you haven't taken the lin alg class 3b1b's videos might make as much sense as it does to you right now
is anyone on to help me
im stuck on this goddamn question and ive spent hours trying to crack it

@boreal crescent im pretty sure its very similar to the other inner products in this exercise
yea but it aint working out
what have you tried?
i tried <f,g> = f(a)g(a) + f'(a)g'(a)
same thing, but with -
i also dont know what basis to pick for P1
1,x is the standard basis, but [1+x,x] seems to give me a closer answer
im assuming that the linear approx is given by f(a) + f'(a)(x-a)
wait, so you tried $\langle f, g \rangle_a = \sum_{k=1}^n f^{(k)}(a) g^{(k)}(a)$?
kxrider:
where does that fail?
@boreal crescent sorry for ping. what did you get for part c?
uh
(f(1)g(1) + f'(1)g'(1) + ... + fn(1)gn(1)) / (f'(2))!
sorry i dont know how to use the math bot
why /(f'(2))!
because otherwise the norm of the basis elements is not 1
try it out with what i put. im just solving these questions in rough right now, and that thing worked for the first four or five basis elements so i assumed it was fine
technically it makes sense. in part b, we accounted for the norm being 1 by dividing in the basis elements itself. over here, that division is defined in the inner product.
nah, thats completely arbitrary sounding. Try $\langle f, g \rangle_1 = \sum_{k=1}^n \frac{1}{k!} f^{(k)}(1) g^{(1)}(1)$.
kxrider:
thats the same thing
f'(2)! equals 1/k !
because f(2) just becomes 1
but yea, i got that
you put it more neatly i reckon
d/dx (x-1)^n
= n(x-1)^{n-1}
n(2-1)^{n-1} = n(1)^{n-1} != 1/n! ?
hmm that sounds really wrong somehow but its 3 am so ehh whatever. anyway, the idea is that $\langle f, g \rangle_a = \sum_{k=1}^n \frac{1}{k!} f^{(k)}(a) g^{(k)}(a)$ is your inner product and you need to show that $a, (x-a), (x-a)^2, \dots$ is an orthonormal basis.
kxrider:
no im on part d now
this way, using taylors theorem, you can express a polynomial as $f(x) = c_1 + c_1(x-a) + c_2(x-a)^2 + \cdots c_n(x-a)^n$ where $c_n = \frac{f^{(n)}(a)}{n!}.$
kxrider:
right
this way, when you subtract off the linear approximation part, and take the inner product with it, the terms $f^{(k)}(a) g^{(k)}(a)$ should be 0 since at least one of $f^{k)}(a)$ or $g^{(k)}(a)$ is 0 for each $k \leq n$.
kxrider:
so the inner product is the same for c and d?
no its not the same. i wrote the inner product for d a few messages ago
i mean, its a generalization
yeah
yes
gotcha
thanks mate
its like 4:30 in the morning over here lol, i appreciate the help
Hey guys
for part b
Do you guys believe it's rigorous to answer in the following manner:
For any x = (a2, a3,.....) in V, we can define the pre-image Y of V by picking any scalar a1 such that Y = (a1, a2, a3, .....)
Hence T is onto
Hello, i need some help with a question. 2 B)
I understand 2 a) but 2b i have no clue and wonder how to do it
@solar osprey if you pick any vector in the target space, you can formulate a vector from the domain which gives this vector, so it must be onto
if someone can help me it would be appreciated
I believe onto was surjectivity? (Not too familiar with English terms)
@wintry steppe Hello, i know your busy but after u finish can you please help me
yes onto=surjective
@long blade sorry I seem to be unfamiliar with this notation so I would probably not be of too much help
did you actually complete part a?
i'll assume your row ops are fine
okay
do you understand the notation in part b?
not really
but a bit
basically
from what i understand
the B_k
meants
its B with a multiplaction of a matrix
i think
that's a bit vague
do you know what [A|I] is?
isnt that
basically
A is the matrix
and the I
is a matrix
with the diagonal being all 1s
they're multiplying
A is the given matrix. I is the identity, with yeah, 1s on the main diagonal
[A | I] is A augmented with the identity
yeah its augmented
which is fancy speak for... make a big matrix with A on the left side and I on the right side with a big vertical line down the middle
are you using that to find inverse?
now hold up
[I B]
you did the row ops already
i did that already
you should have done the row ops on [A | I] to turn A into I and turn I into A^-1
^
so you see a series of augmented matrices separated by ~

just copied and paste to see it easier
do u want me to send a pic of my row operations
these are just saying that all of the augmented matrices along the way are row equivalent
ye
blastman if you don't mind i'd like to do this alone
no worries
i am
lakvinu, you want to pick ANY augmented matrix along the way that ISN'T either the starting one [A|I] or ending one [I|A^-1]
i don't need to see the row ops, i just to know you did em


{kind=link}
{kind=link}
{kind=link}
literally any of those matrices before the first step and last step is fine
then what do i do
im confused
about the Bk
part
what does that mean
BkA
and the A_k
part
tell me which augmented matrix you picked
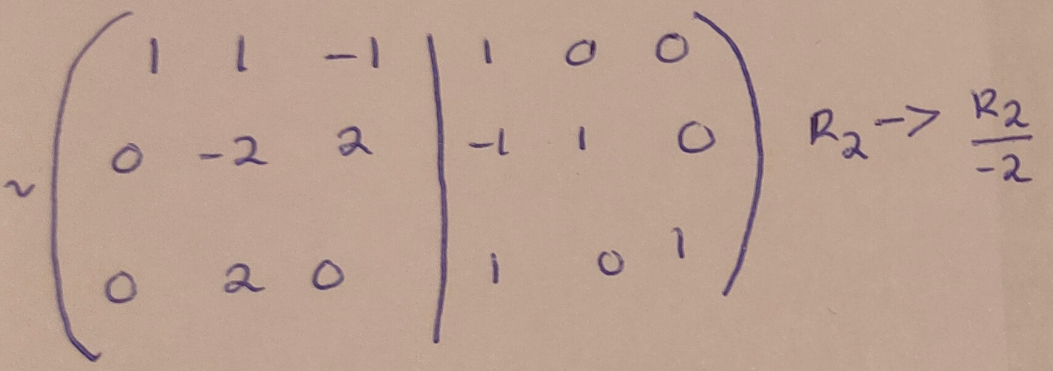{kind=link}

call the matrix on the left side A_k, the one on the right side B_k
okay
then compute B_k*A-A_k
ohhh
okay
let me just check
but just wondering
no matter
what i pick
they should
all result
in the same
awnser
right?
omg
thank you very much
honestly
thank you
@long blade i have a suspicion you got the 0 matrix (yes you're right about getting the same answer) but haven't worked it out. also no prob 
Yes I got 0
I guess they're wanting something like, since you know it's already consistent when you put a juncture there where x_1 is, say
then the flow in to that point is x_1 and the flow out is x_1 to the right and 0 down
it does split
in = out_1 + out_2
x_1 = x_1 + 0
what does it mean for it to be consistent?
don't think in terms of flow of pipes or whatever
in terms of equations in linear algebra what does it mean
yeah perfect
so I gave one solution
and you asked "what if etc etc" which hey, maybe that's possible
but we have at least one solution so we're good
makes sense?
😛
you're welcome
Is the dual space of a vector space V the set of linear transformation from V to V?
the dual space of V is the set of linear forms on V
i.e. linear maps from V to the field on which V is a vector space
Ok
V to V linear maps are called endomorphisms
I'm no sure where to post this as I am new
This is a act math problem that I can't figure out
I'm guessing I have to use logs or something
this isn't linear algebra
Yeah I dont know what it is
you can post it in one of the #❓how-to-get-help channels
Davidwx:
I feel like factoring things would be relevant
I forgot how to factor a difference of powers that dont commute though
https://proofwiki.org/wiki/Difference_of_Two_Odd_Powers I'm thinking of this
anyway I dont know
I dont remember
Scalar multiplication and Vector addition
I remember something about if 0 is in it then its not a subspace but I forgot why
0 has to be in the space so the empty set is not a subspace
if 0 has to be in the space then wouldnt that make this a subspace
unless if I dont know what an empty space i s
yea 0 being in the subspace is one of the 3 properties
H contains the 0 vector. is it closed under addition and scalar multiplication?
Closed under addition means if I add 2 vectors in the space then I should get another vector in the space right?
yeppers
And scalar multiplication would mean the same but im multiplying
yea
Then yes this should be a subspace
that is correct
if i have a linear transformation and ive proved that the nullity is 0 and it is indeed injective
what would i need to prove that the transformation is surjective?
This however wouldnt be because you wouldnt have the 0 vector in the thing
@coral ferry you have to show that it has full rank
that seems to be correct
@slow scroll i havent heard full rank before
how is it different than rank?
I just mean the rank of the transformation has the same dimension as the target space
full rank means that the rank is as large as it can be
i.e. rank(A) = min(#columns, #rows)
oh i see
doesnt tht follow from the fact that nullity is 0?
ie all columns are lin independent
only when T is a square matrix, i.e. an endomorphism
think rank-nullity
but hold on does that mean that if T is a square matrix, nullity being 0 would mean that it is bijective?
yep
do you know rank nullity theorem?
yes
rank(T) + nullity(T) = dim(codomain(T))
Well since nullity(T) = 0....
well in general, a function f is surjective iff the image of f is all of its codomain
err, what is your definition of surjective?
every element in the target space gets mapped to
@gloomy arrow we want the empty set to not be a subspace so we either have one property be the set be nonempty or we have one property be the set contains 0. exercise for the reader: prove those properties are equivalent
right, and the stuff that gets mapped to by a linear transformation is a subspace of the codomain. right? If T is a linear transformation then im(T) is a subspace of cod(T)
that's true for any mapping, linear or not
oh, subspace
sorry, misread
thought it said subset
nevermind
so if dim(im(T)) = dim(cod(T)) then that is enough to conclude that everything gets mapped to. np
@slow scroll wait could you show me why that means image = codomain?
In general, if U is a subspace of V and dim(U) = dim(V) then U = V.
so by rank nullity (and the fact that T is square) we have
rank(T) + nullity(T) = dim(dom(T)) = dim(cod(T))
and since nullity(T) = 0
rank(T) = dim(cod(T))
i.e. dim(im(T)) = dim(cod(T)).
Since im(T) is a subspace of cod(T) with the same dimension, im(T) = cod(T)
npnp
Let $X$, $Y$ be symmetric real matrices such that $X^m = Y^m$ where $m$ odd positive integer $\ge 2$, do we have $X = Y$?
@echo mauve did you solve this?
Share if you got the solution
Oof
hey im having trouble with b)
i don't know how to get the dimension of the kernel
for some linear mappings that satisfy L(V,V)
oh wait i think i got it
yea, think about matrices that add to $\begin{pmatrix}1&&&&\&1&&&\&&1&&\&&&1& \end{pmatrix}$
kxrider:
yeaaa
got it
Could someone please explain a linear algebra question: Consider vector space P:=⟨x1,x2,x3,x4⟩
x1=(1,2,3,4) , x2=(4,3,2,1) , x3=(3,0,2,1) , x4=(4,1,3,4)
Further, consider vectors
x=(1,1,0,3) and y=(4,4,4,2)
- Decide, whether the sequence (x1,x2,x3,x4) is linearly independent or not.
- Find dimP and some basis of P.
- Decide, whether x,y∈P
- Find coordinates of x or y with respect to basis of P, in case the vector belongs to P.
I know it's like super basic, but this example is driving me insane.
@strong nexus theres 4 questions there which you do you need help with first?
1
what would one call the process of converting the coefficients of a linear equation into a vector?
finding a corresponding coefficient vector?
I'd call it factoring in some cases
anyway to address @strong nexus 's question
do you know how to check linear independence?
factorize items of class Factorable it is
yes, I think the answer is Linear independent
wew no @coral tinsel
you have to show that $a\begin{pmatrix}1\2\3\4\end{pmatrix} + b\begin{pmatrix}4\3\2\1\end{pmatrix} + c\begin{pmatrix}3\0\2\1\end{pmatrix} + d\begin{pmatrix}4\1\3\4\end{pmatrix} = \begin{pmatrix}0\0\0\0\end{pmatrix} \implies a = b = c = d = 0$
ugh
i dont have my preamble
one second
Namington:
but the problem is the matrix. , after doing GEM, the results don't look as good as usual
yes
anyway yes, that works; construct a matrix and check if its determinant is 0 or not
or just find its rank
[same thing in spirit]
,w row reduce {{1,2,3,4},{4,3,2,1},{3,0,2,1},{4,1,3,4}}
looks like they're linearly independent.
well I have a record with ingredients and products that I'm converting to the coefficients in a linear equation as pairs of (String, Integer)
got a better name?
wait, isn't it supposed to be written the other way around? I mean you wrote (1,2,3,4) as a row, but I wrote it as a column
youre right, its generally better to write it as a column
in this case, its equivalent
but i shouldve done the other way
,w row reduce {{1,4,3,4},{2,3,0,1},{3,2,2,3},{4,1,1,4}}
i know its equivalent in this case because this matrix is square and row reduces to the identity matrix, hence its invertible, hence its transpose is also invertible
but yeah admittedly it would've been better to just compute this
and shouldn't there be another column at the end with all 0s?
uh ok youre doing this in another way
thats fine
,w row reduce {{1,4,3,4,0},{2,3,0,1,0},{3,2,2,3,0},{4,1,1,4,0}}
so now you have to solve the system
y_1 = 0
y_2 = 0
y_3 = 0
y_4 = 0
which uh is
kind of trivial
lmao
but anyway, since all of these are 0
that tells you that these vectors are linearly independent.
wow, ok, that's what I initially got which confused me
again the point here is that
thank you
we're trying to figure out the values that make
$$a\begin{pmatrix}1\2\3\4\end{pmatrix} + b\begin{pmatrix}4\3\2\1\end{pmatrix} + c\begin{pmatrix}3\0\2\1\end{pmatrix} + d\begin{pmatrix}4\1\3\4\end{pmatrix} = \begin{pmatrix}0\0\0\0\end{pmatrix} $$
Namington:
if the ONLY values of a, b, c, d that work
is when all of them are 0
that means it's linearly independent
it turns out, you can interpret this as a matrix
if the first column represents the values of a
the second column b
and so on
you're basically solving a linear system
so, it has 4 basics?
and when you get $\begin{pmatrix}1&0&0&0&0\0&1&0&0&0\0&0&1&0&0\0&0&0&0&1\end{pmatrix}$
Namington:
this is basically saying
$a\begin{pmatrix}1\0\0\0\end{pmatrix} + b\begin{pmatrix}0\1\0\0\end{pmatrix} + c\begin{pmatrix}0\0\1\0\end{pmatrix} + d\begin{pmatrix}0\0\0\1\end{pmatrix} = \begin{pmatrix}0\0\0\0\end{pmatrix}$
ugh
Namington:
there we go
anyway, this clearly requries a = 0, b = 0, c = 0, d = 0
hence we have linear independence.
oh whoops
ok
but is it really possible to get to that form with only 1s and 0s?
not for all matrices
but in this case, yes
you dont actually have to fully row reduce it
the idea is just that
you're solving a linear system
it's often easiest to fully row reduce it
but you can use whatever system-solving techniques tickle your fancy
class Factorable factorable keysType where
factorize :: factorable -> Map keysType Integer
@quartz compass
....that's bigger than I thought
it's just that "row reducing" is one way to solve a system
and for large systems, its often the fastest
(its what computers use)
@coral tinsel dont @ me with your nonsense kid
sorry
what I said and what you took it to mean were two separate things
gross to see
not to mention the random programming spam
May I ask if you have a better suggestion than factorize-ing something of class Factorable?
anyway, thank you for your help @limber sierra
Can anyone help, I am very lost with the new material
Use the definitions. We know that:
$||v|| = \sqrt{(v,v)}$
$||cv|| = \sqrt{(cv,cv)}$
The second equality can be simplified by the bilinearity of the inner product. That is:
$(cv,cv) = c(v,cv) = c^2(v,v)$
$||cv|| = \sqrt{c^2(v,v)} = |c||v|$
Abhijeet Vats:
@icy osprey
The point is that there are definitions you can use to prove these results.
Understand everything above?
let me take a look
Also, don't multipost
No problem
can you help with other problems I have too? Nothing makes sense since I am fully online now
let me just take some notes on my paper
what does the double lines mean?
It's supposed to denote the norm.
So, | v | is the norm of a vector v in some euclidean vector space
The norm is defined in terms of the inner product, which is a map. So, it's a function that satisfies some properties.
The inner product is more general than the norm
Is it not stated in the textbook you're using?
I'm reading the lecture notes
What do your lecture notes say?
Let me send the pdf
I'm lazy to type it all out but basically, it's just a map that's bilinear, symmetric and positive-definite. That's all it is.
Okay yea it's right there
Like, the definition you want is right there, as soon as they begin talking about the dot product.
It's not really stated super rigorously but it's good enough
What do they mean a map?
function
Map is commonly used throughout math
Like, the word is used in place of the word 'function' throughout math
Is there any way to visualize this?
Visualize the inner product? I'm sure you can find something online that can help with that.
because I have no idea what the question is asking and what to put down
Try searching for Immersive Linear Algebra and see if they have something on it.
will do
Did you go through what I wrote above?
Does anyone get this
I understand the normal diagonlization
But idk how they want me to find that weird matrix C

If you're doing an exam now, then no.
Just delete everything and don't do it again.
It’s not for a grade tho
This course is ungraded
Like I don’t receive a grade at the end
It’s just “enrichment”
From coronavirus
lucky
But straight up we never learned this
I don't think that matters. If the mods allow it, then whatever lol.
We’ve had online for the past 2 weeks
like each prof is doing a different thing lmao, one is doing live lectures, other is just uploading class notes online
Anyways, yes, that was the correct website jazzy
and another is recording videos and posting
Can I dm you?
ikr it's so wack
@cursive narwhal
Sure
If A is an nxn upper triangular matrix
is A always diagonalizable?
I'm like running through examples
and it seems like it is every time
but idk
oh wait
its false
Prove that if $V=U\oplus W,$ then for every $v\in V,$ there exist unique elements $u\in U$ and $w\in W$ such that $v=u+w.$
fields!:
i'm not sure how to prove the existence part
what's your definition of direct sum
i'd at least assume here that V, U, and W are vector spaces over F
all possible sums of elements in the sets
vaguely speaking
sur
i want you to procure the actual rigorous definition of direct sum
bc you'll need it here
it's the set containing ordered pairs of elements from U and W in this case
i'm not sure
if you're not sure of the definition then you have no hope of doing this.
idk
go back to your notes
i don't have any notes on direct sums.
i'm just reviewing past exercises of lin alb
no.
my prof was the one who made this exercise
but he taught us, the current class, nothing about direct sums
were they meant to be covered in a previous class
i don't think so.
we're done with bases, dimensions, the rank-nullity theorem and the steinitz replacement theorem already
wait, so you haven't even started direct sums and you're being given an exercise which involves direct sums?

i think this is just concerning subspaces
no, i just want to do exercises on lin alb in general
this in particular
since it's one of what i've gotten
it wasn't given to us by our prof
so
what now
i'd really like help on this one
i only know direct products and not direct sums
ooh ooh
i found some notes
but not mine, a previous student of prof
If $U\cap W={0},$ then $U+W$ is the direct sum of $U$ and $W,$ dntd. by $U\oplus W.$
fields!:
there we go
so going back to your problem, you have that $V = U + W$ and $U \cap W = {0}$
Ann:
the fact that $V \subseteq U + W$ will guarantee the existence part of your problem
Ann:
right
not sure bout the uniqueness
take u' in U and w' in W such that v = u' + w' = u + w, perhaps?
sure
with the eventual goal of proving u = u' and w = w'
which one?
this doesn't prove anything
well it proves that v - v = 0
so how?
youre gonna have to use the fact that their intersection is just {0}
if i'm asked to find all units vectors perpendicular to a plane, i just need to find a vector orthogonal to the plane in both directions and then find the unit vector of that right?
and there should only be two possible unit vectors?
thought so, thanks for confirming
why is that when i run the dot product with the x vector i get a constsant d
and not 0
i thought the normal vector is perpendicular
though, I'm a bit confused about why it's both positive and negative
@tropic token
can you also check out my question, maybe it will help in aiding yours
can you visualize the xy plane @tropic token
@normal canyon do you have the question? you've only sent the solution
i understand it now
its all good
its hard for me to visualize vectors from the origin
i was doing it wrong like an idiot
whats your question @tropic token
i was wondering why there were two orthogonal vectors in my question, because don't you have to use the right hand rule or something to find the direction of the orthogonal vector?
how do you check if something is a vector space?
you check that it satisfies all the vector space axioms
that's one axiom you have to check
whatre the axioms
well, most of them should be fairly self-evident
like it should be obvious that all of those satisfy associativity and commutativity of addition
and they have identity elements
in this particular case, the main thing youre going to want to check
distributivity and scalars?
being defined over a scalar field
is the one that matters particularly here (note that the integers are not a field.)
you also have to check closure
if you add any two vectors
your resulting vector should also be in the space
0 should be an element of your scalar field, since every field has 0
then the answer is a, b, c
im concerned that you dont know this, which maybe makes me think that your class doesnt want you to look at it this way
do you mean 0 the scalar or 0 the zero vector of your vector space?
and just wnats you to memorize a list
or something
what field is a defined over?
well 0 is a scalar
we never learned it as a scalar field
field is defined over all reals
yes sir
this is thonkery
im growing more convinced that they just want you to memorize a list or something
probably lol
Z is not a vector space, since its scalars do not come from a field

in particular, its scalars lack inverse elements under multiplication
huh..
[except +-1]
woahhh i am very confused
also im curious why you think d isnt a vector space
because a3 can't be 0
if you multiply by scalar 0
then it's no longer in the space
ah i guess that works, i thought you were doing something different
the argument i'd have used is just that
clearly x^3 is in the space
but then x^3 - x^3 = 0
which is not in the space
but yours works too
we require vector spaces to be defined over a "field" of scalars
a field is an algebraic structure where addition and multiplication follow some very particular rules
can you explain what a field is.. LOL
the one that matters here is that
multiplication has inverses
full list
anyway this isnt true for Z
since for example
2 doens't have an inverse
since there's no integer such that 2 * x = 1
we know 2 * (1/2) = 1, but 1/2 is not an integer

in that case i just
what
i mean Z certainly isnt a vector space in that case
since 1.5 is a "real scalar"
but then 1.5 * the 1 vector
is not in Z
scalars come from a field
but it looks like your class is just
assuming the field is always R
which is fine i guess
deadass i dont know what a field is
ye
so its b and c
hUh
@limber sierra but at this point it seems i'm just determining if its a subspace
well yeah, thats one approach you can use
wait what
if you know your set is a subset of some larger space
and follows the same operations
but i thought i'm determining if it's a vector space
because for a subspace, you only need to fulfill the three axioms
thats where the "space" comes from
wait so hUh
yeah, you only need to fulfill a few because some come "automatically"
since you're a subset of a larger vector space
like commutativity for example
so hold up
youre not magically gonna become non-commutative
jsut because you ditch some elements
if you know the structure youre looking at is a subset of some known vector space
with teh same operations
then yes
nonempty, closed under scalar scalar multiplciation
note that "same operations" is important though
like, $\bZ_5$ is a vector space, and its set of elements ${0, 1, 2, 3, 4}$ is a subset of $\bR$, but that does not make it a subspace of $\bR$
Namington:
since arithmetic works differently in Z_5
i dont think that matters too much in these examples though
but in Z_5, you have 3 + 4 = 2 for instance
since 3 + 4 = 7 = 2 = 12 = 17 = 22 = -3 = -8 = etc.
it seems like youre not really dealing too much with examples like that
but it's worth mentioning
that you have to make sure you're "inheriting" the operations properly
(since obviously 7 is not equal to 2 in the standard real numbers)
woahhh wait
i thought we just said Z is not a vector space3
because scalar multiplication doesn't carry through
@limber sierra
Z and Z_5 are two separate things so it's ok
Z_5 is more formally the quotient Z/5Z but
thats a fair bit beyond the sscope of this convo
hUh
okay
oop
I think i got this correcttt
i'm getting da hang of this @limber sierra
x1 cant be 0
holy shit
im an idiot
i read that as an = sign
not a =/= sign
lmao
yeah nvm
aye the pupil surpasses the master
i dont think c works
because it aint additive
for sure
because of that sqrt
what do you mean?
c. isn't closed under addition
there we go
yes sir
d works fine
and e works too
as long as 0 in in Z
and Z is all integers
yeah, sounds like you get the gist
and i think 0 is an integer..
aye
lowkey aren't a and b both correct @limber sierra
whats 1t - 1t?
0
does 0 have a_1 = 1?
im an actual mega idiot
lmao
i read a_1 as a_0
how the heck
my teacher expect me
to do this
so much workkk
crap its not even linearly independent
@slow scroll is there an easy method to do this
it's d correct?
yeah d looks correct
its kind of a tedious problem, but the idea is that every vector in the correct set should be a linear combination of vectors in the set you're given and vice versa.
it says the set of continuous functions on the closed interval [-1, 1] is a subspace
it also says that isn't a subspace of R ^^
like what..
x1 and x2 are integers...
yyea but that's a subspace
your subspace lives in Z
oh..
it says the set of continuous functions on the closed interval [-1, 1] is a subspace
what about that
is a vector space**
yea, what about it?
the domain is [-1, 1]. When you multiply a continuous function by 4, the values in the range increase, but it is still a continuous function on [-1,1]
nah
Reposting this here
Let V be a subspace of C^n that is closed under complex conjugation. Show V has a real basis
My idea was this: Let b1,..,bn be a basis. Then I thought {b1+conj(b1),...,bn+conj(bn)} would be a real basis
But I'm having trouble showing linear independence/that it spans V
I don't think it's true. Take C as a vector space, and C as the subspace. Closed under complex conjugation, and has no real basis. Am I misunderstanding the question @uncut forge?
Thank you, very nice
Made mistake
With some adjustment to the Im part I guess
maybe V doesn't have the same dimension as Cⁿ, but ignoring that, the family (Re(b1), Im(b1), ..., Re(bn), Im(bn)) spans V (it's made of vectors from V because 2Re(bk)=bk+conj(bk) and 2iIm(bk)=bk-conj(bk) you can generates the bk's with it), has only vectors with real coords and then you can extract a subfamily that'll be a basis of V
there fixed
my thinking so far: AB somehow becomes (I-A) (I-B)
sorry did i barge into the middle of smth
You're welcome 🍻
How about you multiply by B¯¹A¯¹ in the equality A+B=AB? @mild tiger
oh thats so smart... i tried a^-1 AND b^-1, but individually not together
actually this inst the real question
i think it wont work for the real one
they don't have to commute, just multiply on the left by A^-1 and the right by B^-1 to avoid it
O ye it's better like that
what
confused how u multiply different things on both sides
oh
wait
got it
A blah B
A¯¹(A+B)B¯¹
is this channel open to post lin alg quesiton
sure go ahead i think i can handel the rest
thanks
pretty much?
is this identical haha
you guys are like in the same class or something you should explain it, pay it forward @mild tiger
hmm why do you say that @maiden silo
@opal sphinx i feel like i remember a theorem that said that
but col AT= row a
ohh i think thats the theorem
yea so nul a doesnt equal col at
no
P4 translates to R5
ye
I thought you meant like the null space translates it
the null space is in R5
but it takes vectors or polynomials that are in R5
[3x5][5x1] = [3x1]
yess
no, so the null space takes vectors that are in R5
so all the vectors in the set of the null space are in R5
yea
alright bet
so its false bet
i feel like this has to be true right
@opal sphinx
uhh hmm I'm just finishing lin alg 1 so I haven't really done f(x) stuff with vector spaces,
butttttt
my question is, is f(1)=3 in C[0,2]
idk tbh😂
i forgot 0 function lol
vectors can have more than one basis right??/
vectors don't have a basis
the vector space does
and yes, there can be more than one basis
@limber sierra
i think it's false
because it could be a linear combination of k+1, k+2... so on
you know gram schmidt?
It was in lecture the other day but everything is online and nothing makes sense