#linear-algebra
2 messages · Page 73 of 1
How can we even asses the dimension of a transformation
Same dim
L(V,W) has dimension dim(V)dim(W) for finite dimensional vector spaces

but yeah what Rixia said
yeah but it's easier to consider M mxn
but in general $\dim \mathcal L(V,W) = (\dim V)(\dim W)$ for finite dimensional spaces
gfauxpas:
finite dimensional is always nice...
Saying that any vector X can be written as a linear combination of the columns of some vector A

Speaking of finite
The rank-nullity theorem
Stating that dim(V) = rank(L) + nullity(L)
what about it
Ive been thinking about how to prove it doesnt hold for infinite dimension
you have to set up rules for addition of infinite numbers
yes
it doesnt hold for infinite dimension
ImL=V
if you say that $(+\infty) + (+\infty) = +\infty$ then okay things should be fine but it's not very yseful as Rixia said
gfauxpas:
you would also have n+inf=inf
sure why not
just don't try to subtract infinite from itself, that breaks things
in this naive system we just discussed
now of course you need axiom of choice to say that it holds
but i would say that's almost always assumed
if you don't assume a.o.c. then dimension isn't well defined for all spaces
finite dimensional vector spaces are still fine
infinite ones break to an extent
but back on the topic
basic idea of the proof is the same as the finite dimensional case
you consider a basis of ker T, a basis of imT
then the union of basis for ker T and basis for preimage of imT forms a basis for V
Part 5-6
infinite dimensional vector space breaks the implication that kerT={0} implies surjective
they tell you which spaces you should use for your coutnerexamples you just have to figure out what operators are linear that break it
do you know the notation
consider T{x_i}={x_i-1}
then consider T{x_1,x_2,..}
T is surjective but kerT is not {0}
wait who asked the question I lost track
hm?
that's the converse rixia
ah right
im saying who is helping the question asker and who is asking the question I lost track
im trying to help
1-1
its a double implication
if its finite dimensional
wait wtf am I even saying
1:00 am
x (
ok let me clear my thoughts
part 3 and 4 tells you in the finite dimensional case, injective implies surjective
and the other way
but that's not true in infinite dimensional vector space
that should be enough to say that it breaks
use the left shift example i stated earlier
or right shift, if you so wish
ohhhhhhhhh hold up
i think i know what your professor is getting at
@solar osprey consider derivative and integration as linear operators
in R[x]
does anyone know what the U is?
found it in the book:
Actually I will zoom in:
do I just treat U as B?
Im back to strike again
Let V be a vector space of dimension n. Show that V is isomorphic to R^n
okay cool
if dim(V)=n, then it has a basis of n vectors, {x1, x2, ... , xn}
can I show my work?
x1e1 + ....+ xnen
mapping one basis to another of the same size is an isomorphic map
you should probably word it better
Yes I should
but that's the essence of the solution
How do you prove that Null(a) is orthogonal to Rowspace(a)?
thats an interesting question
is the row space the same as the transpose of the column space
no
sorry I meant column space of the transpose of the matrix*
Row(a) = Col(A^T)?
assume x in null(A), then Ax=0
let a_1, a_2, ..., a_m be the rows of A, then Ax=0 implies a_1 * x = 0, a_2 * x = 0, etc. So each vector in the basis of the row space is orthogonal to any vector in the nullspace
so Null(A) is orthogonal to Row(A)
ok
and can I modify this slightly to say that the null space of the transpose is orthogonal to the column space?
intriguing proposition...
ya
I believe so! @steady fiber, do you concur?
null space of the transpose is orthogonal to the row space of the transpose, and row(A^T)=col(A), so ya
@steady fiber, what if instead of Row(a), we had col(conjugatetranspose(A))?
Would this still hold?
for a real matrix yes :^)
what if there were complex numbers?
in A?
yea
ya idk, I'd have to think about that
ooo, that tickles my brain...
idk my conj transpose properties
ya I know what it is
just haven't used it in forever
definitely haven't used it in a pure math context in a hot minute
physicslife
nah I dont think it holds
why dont you think so?
It was on my homework a while ago, I do think it holds
They said "prove" not "disprove"
Consider it in an inner product space?
Then conjugate transpose is the adjoint operator
But that only applies to linear operators
Hmm
Good night
goodnight
@fallow jolt i think i got it.
consider <x,A*y> for x in null A
<x,A*y>=<Ax,y>=0 since Ax=0
then <x,A*y>=0 for all x in Null A and y in V
What is this < > notation?
inner product
then Null A is orthogonal to Im A*
but Col(A*) is Im A*
thus we are done
I think I made a mistake in calculating an invertible matrix
Here's what I got:
actually nvm
here we go
I get this strange thing
k = l and k = -l
or k = +- l
so then I get an S matrix of just 1's
but I checked this on wolfram and I saw that it wasn't suppose to be this
Did I make a mistake in my computation?
If T is a linear map from V to W, is it always possible to define a basis B = {v_1, ..., v_n} for V s.t
T(a_1 v_1 + ... + a_n v_n) = a_1 w_1 + ... + a_n w_n
∀a_j and for some w_j ∈ W
I’m asking for a proof I’m trying to cook up
I suspect the answer is yes, but I worry that I suspect that out of convenience for myself
yeah
you can do that
check your dimensions though
might not be a basis after the transformation
You mean it might not be a basis for W?
I don’t mind that
If that’s what you mean
yeah
Epic, thanks
you can always split a vector into a linear combination of basis vectors
and T is linear, so everything is convenient
So it works out for all a_j, that’s p neat
a_j are scalar so they just get pulled out anyway
Ahhh
you want to show that if Tx = Ty then x = y.
what is the natural thing to do, starting with Tx = Ty
yep
npnp
@pastel saffron R(T) = N(T) is definitely not true in general: i.e. when dim(V) is odd since you necessarily have R(T) != N(T)
np
That is, |u| = √[u•u]
@bold blade
.. and thats because of rank nullity, dim R(T) + dim N(T) = dim(V)
What are R(T) and N(T)?
R(T) is Im(T) and N(T) is ker(T) i believe
Ker(T) is a subset of the domain
Im(T) is a subset of the codomain
Unless the domain and codomain are the same, it doesn't make sense to ask about relations between ker(T) and im(T)
well in inyhaks case, T^2 = 0 which would imply im(T) \subset ker(T)
do you know that <v, w> = 0 for all w in V implies that v = 0?
yeah, as long as T is an operator.
im not sure i see what the "for all" quantifier is for here. It seems like as long as there is a non zero vector a for which <a, Ta> = 0, then Ta = 0 and a is in the null space.
This would hold on arbitrary fields, yes
and umm, by operator, i mean T maps from a vector space V back onto itself.
wdym both instances?
well, i shouldn't say arbitrary fields, since we are talking about inner product spaces, but we didn't assume one or the other here, so it should work for both
@pastel saffron no im wrong
<a, Ta> = 0 for all a in V says nothing about the null space. The situation we have is not the same as the "<v, w> = 0 for all w in V" situation i described earlier
probably, yea.
Ta is orthogonal to a, but not to V. (think about it, a cant be in V and be orthogonal to V, unless ofc a = 0)
i thought it might help to check the case when a is an eigenvector (these always exist when T operates on a complex space), but i don't see it going anywhere hm
if no one else helps in 15 minutes, you can ping @ Helpers 🤷♂️
Hey guys, could someone explain to me why this is true?
a bit unsure of why the last bit is true
AA^T qi = 0
qi^T AA^T qi = qi^T 0 = 0
np
I fail to see how an arbitrary inner product can say anything about invertibility
sorry you feel that way
If i have this matrix
and i have to find the eigenvalues
can i get it to upper or lower triangular form
or does it have to start out that way
can't quite figure it out
leaning towards it having to start as this
Because the eigenvalues of a triangular matrix are its diagonal elements, for general matrices there is no finite method like gaussian elimination to convert a matrix to triangular form while preserving eigenvalues
Going based off my notes from last semester just wondering if you do make it a upper triangular matrix per say and then get the determinant to use to solve for the eigenvalues?
@bold hearth
one sec
So for example this matrix we wanna figure out the real eigenvalues so we do this
Any of this look familiar?
ye one sec
does that not alter the values of the determinant
Ye thats why I was thinking you were maybe shown a different way
if its a really large matrix
ok now i understand
the (greek letter - 1) part was clever
i hadn't thought of that
ye subtracting the greek letter multiplied by the identity matrix
that one is obv ofc but the row operation one was the one i was wondering about
Ok so its always possible to get it to this form
but i may take infinite number of steps
i think
if its super large
or not finite
but yea it seems long so just maybe see if there is another way 😂
Because the eigenvalues of a triangular matrix are its diagonal elements, for general matrices there is no finite method like gaussian elimination to convert a matrix to triangular form while preserving eigenvalues
yeah since i had a question i was trying to answer
if its always this easy (as a upper triangular matrix) to find the eigenvalues
and i thought yeah its always this "easy" you just get it to this form, which may be very hard, but once that is done its easy to find the eigenvalues
You can resort to finding the minimal polynomial of the matrix
how do we determine the uniqueness of a function?
Depends on context
But usually you assume they're not unique and say f1 and f2 both qualify
And show f1=f2
In the real vector space V of the continuous functions of R on R, we study the linear map A taking any function f in V to the function A(f) defined by (see picture).
What are the eigenvalues and eigenvectors of A?
How can I approach such a problem?
Well, a function $f$ is an eigenvector of $A$ if $Af=\lambda f$ for some $\lambda$. Therefore we can write that $\int_0^xf(t)\dd{t}=\lambda f(x)$. Now notice a few things: substituting $x=0$ yields $f(0)=0$; the left hand side is differentiable by fundamental theorem of calculus therefore any eingenvector $f$ must be differentiable; differentiate both sides and obtain a differential equation with initial conditions
Whoever:
this is not linear algebra
see #prealg-and-algebra or a generic questions channel
linear algebra is the study of vector spaces
so vectors, matrices, linear systems, norms, eigenstuff, determinants

lol that eqn isnt even linear
Lmao
my bad lol
two in a day within 15 minutes of each other whoop
How do I do question 1?
this is also... not linear algebra xd
its in y=mx+b form, just compare the m's.
a+2 = 3a - 1
i.e. since they're parallel their slopes are the same
Ohh
Ok fine

lmfao
Hey, guys, if v is a unit vector, would ∥(−1)v∥ just be 1?
👀
y=mx is linear. y=mx+b is affine
I mean yeah, ||-v||=sqrt(<-v,-v>)
and you take out the -1
@slow scroll where b≠0
yep, thnx
No ones on the pre algebra section so can I ask my question here ?
Reading up on vector transform. How would I go about getting the transformed point given an angle
Say.... transforming a point 90 deg
u can think of that point(lets say in 2D) as a vector
u can multiply it by the rotation matrix
theta is the angle u wanna rotate ur vector by
u multiply by R and u get a new vector which is gonna be rotated by theta
@fair light
if the question asks... (1, 2) rotated ccw 90deg. how should I do that?
cos(90) -sin(90)?
R x that matrix?
that matrix is R
the dotted stuf fis ur R
if u multiply these together, its gonna yield another vector which is gonna be rotated 90 degrees
I have a particle and I wanna rotate it. Unfortunately I have a single line input
wdym a single line input ?
The "textbox" where I can add the formula
as i said, the end result of this matrix multiplication is gonna produce a vector in 2D
like (3, 5) lets say
u shouldnt have any problems inputing that

"I have a particle and i wanna rotate it." What is the general context for this? If you're working with a particle, you don't care about the rotation of the particle no?

lol.. sorry.. it's for visual effects
So I would have to write it as : 2x0 + 1x-1 for X
I think I got it
Thanks @shy atlas

How would that matrix change if it's 90 cw?
rotate -90
ahh.. coolz thanks!
npnp
its more complicated. It depends on the axis of rotation
oh ok. What is this called? How would I look it up?
I don't need a 3d point, I'm just wondering
😅
In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix
R
=
[
...
kxrider:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
in general, you need a few more rotations beforehand that will "align" the axis of rotation with one of the x, y, or z axes so that you can apply one of the rotation matrices I listed above (R_x, R_y, or R_z)
and then you have to apply the inverse of those initial rotations to get the axis of rotation "back where it belongs"
np np.
@fair light ah yea i found the part of the wikipedia article that talks about this
but as you can see, the matrix is nasty in general lol
Sweet.. I was just reading through it 😃
how are you defining dimension?
actually wait
thats probably not the best question to ask here
first off, you can assume that every vector space has a basis, right?
and if it's f.d. then it has finite basis
well ive got to go soon but i'll give a vague, but hopefully helpful, hint
consider row operations on a given basis (particularly helpful for intuition may be to consider a standard basis)
intuitively, you want to, for every vector
find a basis such that removing any vector from that basis
now excludes your original vector
[this works because basis vectors are linearly independent]
basic question: if I have two vectors A and B in R2, how do I represent the line formed by A and B?
"the" line?
two vectors generically will span a plane so long as they're not parallel
or oh maybe I see a way, like you mean pick the two points defined by the vectors A and B and use that to define a line?
draw a picture I think that will help. Take one point on the line, such as A, and then take all multiples of the vector parallel to your line to it, like this:
(B-A)t+A
how did they say 4A - 9 * that matrix = 2A - 5 * that matrix
see how they switched the 4A -9 with the 2A - 5
on the 2nd line
oh ok
i see that
how bout here now
so they just set
2A - 5 * that matrix = 4A - 9 * that matrix
then solved for A right
yeah
yeah ok
also
I don't really understand this I stuff
so they took the inverse
i understand
then wehere did the I go?
and also
It's just matrix addition
emeric75:
yeah sounds like they fucked up
PeakThePenny:
Compile Error! Click the reaction for details. (You may edit your message)
there's double backslashes in the middle
and they disappear when you copy paste
$I$ is just $\begin{bmatrix} 1&0\\0&1\end{bmatrix}$
$I$ is just $\begin{bmatrix}\ 1&0\0&1\end{bmatrix}$
emeric75:
well it could be of another dimension
can someone help me
they didnt teach this yet since we are in quarantine
imma solve the first one but idk if im right
so what i think the answer for number 1 is a = 5 square root of 2 and b = square root of 46
So what is the dot product?
Lol yeah
so the comma is meant for the dot product
Don’t you see? $\norm{a}=\sqrt{a\cdot a}$
Whoever:
The dot there is the dot product between a
Oh sorry I didn’t mean to be aggressive
sorry im more of a hands on
they teach this usually like normal but classes are suspended
so my problem is, what approach should i take
to solve it
do you know how to compute dot products
am i in the right track? or what am i suppose to do with the exercise above
not yet
all i got is this
that's the one
if $a=(a_1,a_2)$ and $b=(b_1,b_2)$ then their dot product is given by
$$a\cdot b=a_1b_1+a_2b_2$$
RokettoJanpu:
so the first element multiplied and added to the second elements of both?
until to n
is that right?
sorry your wording is just butchering what i typed above
lol sorry
here's an example
can you do an 3dimensional one as example
let $a=(1,2,3)$ and $b=(4,5,6)$ then their dot product is computed as
$$a\cdot b=1(4)+2(5)+3(6)=32$$
RokettoJanpu:
ok that make sense but how do i get the | |a| | and | |b| |
RokettoJanpu:
so in your example will that a*a be a 32 * 32
so that it gets a nonnegative
sorry if im bad at this
no what i did previously was take the dot product of a & b
in the definition of norm of a, inside the square root you dot a with itself
for now, for you there's no reason why there's a square root, you were just given a formula and your hw is to follow it
to find the norm of a, you take a dot a, then square root the resulting product
you should tell me when you're doing the hw, you just threw a pile of numbers at me
and especially since i already used a in my example
oh ok
ok let me use your example then
from a={1,2,3} and b ={4,5,6,} becomes 1(4)+2(5)+3(6)
then square root?
idk, the exerices only states find | | a | | and | | b | |
i wish it has more exact intructions
i'd say you were given everything needed to do the hw
i'll repeat the definition of norm
$\norm{a}=\sqrt{a\cdot a}$
RokettoJanpu:
to find ||a|| which is called the norm of a, you first dot a with itself ie take a dot a, then square root the resulting number
@light fable you're not fishing for answers are you, hoping that he'll eventually get exhausted and give you the solution
yep sorry im just so confused
Well
I think you're thinking too hard and reading too little
Here is a super quick example of how to calculate norm product
$\norm{(1,2,3)}=\sqrt{(1,2,3)\cdot(1,2,3)}=\sqrt{1\cdot1+2\cdot2+3\cdot3}=\sqrt{1+4+9}=\sqrt{14}$
Whoever:
show your best guess and working if you're unsure, it's nicer to the people helping you if you put forth the effort of at least making some attempt
my only question is, will a and b separated since it says find | | a | | and | | b | |
you find those separately
oh ok
then i thinks thats about it
i think the first one is a = 5 square root of 2 and b is square root of 46
welp thats what i think
9+25+16 = 50
then squareroot it it becomes 5 squareroot of 2
idk
is that the end
we'd say "||a||=5sqrt(2)" not "a=5sqrt(2)"
don't worry, but what i'd do is read over everything i just said a little more thoroughly, and if you can help it, don't overthink most things
im just so confused with the second part
it says to show a new vector to be a unit vector
a vector is called a unit vector if its norm is 1
if a is a nonzero vector, then a/||a|| (which is a divided by its own norm) is a unit vector, and your notes gives a hint on how to show that
you're very welcome, have a good night
go ahead
im trying to get a matrix <x_1,x_2,x_3> and im starting off with \begin{pmatrix} x_1 \ x_2 \ x_3 \end{pmatrix}
Lino:
Compile Error! Click the reaction for details. (You may edit your message)

try surrounding the line with dollar signs?
$$\begin{pmatrix} x_1 \ x_2 \ x_3 \end{pmatrix}$$
RokettoJanpu:

sounds like you didn't close the math mode or something
enter math mode iirc
same as \[ pmuch
tbh i dont know what [ does either
well you didn't have a \] closing math mode tho before
im taking it from a really confusing guide
would you have any recommendations on how to learn latex
seems my knowledge gap may be too big
alright thank you i'll try use this
but yeah try $$\Pi_1 : \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}$$
emeric75:

hmm
what's your preamble?
maybe you don't have amsmath imported or shit like that

yeah the beginning
yeah add \usepackage{amsmath} in the beginning
it's just to import a library in your document
and those matrix thingies are in amsmath
do you know what utf8 would be?
it's just the encoding you use in your text
if you want to support french accents,etc..
ok the switch worked
thank you very much
for future, do you know where i should ask for latex help?
im assuming linear alg channel is bordering on misuse
usually ppl just go in #computing-software (or #math-discussion sometimes)
or just plain #❓how-to-get-help channels
how the fuck is this wrong
this makes no sens
e
i am trying to get determinant of this
i reduce
1 1 1 1
0 2 0 0
1 1 -1 1
1 1 1 -1
R1 - R2
but aparently
that 2 has to be ngative
because u only get the right answer
yeah it should
you're doing R2 -> R2- R1
No i did R1 - R2
-1-(+1)=-1-1=-2
why cant u do that?
Why cant u do R1 -R2
why does doing R1 - R2 get u the wrong answer
because you're multiplying R2 by -1 first
shit makes no sense so frsutrating
that means the determinant changes sign
instead if you do R2-> R2-R1, there's no sign changes
and everything's k
I never multiplied by -1
I'm just getting it into REF
and aparently u cant do R1 - R2
because that gets u the wrong answer
like wtf is this shit class
you're doing R2-> R1-R2 which is actually two manipulations R2-> -1×R2 and then R2-> R1+R2
you're implicitly multiplying a single row by -1
resulting in the determinant changing sign
so if u keep ur manipulations with only positive coefficients of each row, then you won't face such errors
huh
or you should do R1-> R1-R2
in which case you'd get 0 +2 0 0 in first row
and you can simplify
see you're multiplying R2 by a -1 in that row transformation
im subtracting it
yeah ok
there's a ×-1 which crept in there
if you change sign of one row, you flip sign of the determinant
only multiply with positive numbers, to preserve determinant
that's why R2-> R2-R1 works
because R2 sign isn't being changed
but it's the same shit
it's not..
ur multiply R1 by -1
but I'm not transforming R1
I'm transforming R2 - > R2 - R1 but R2 sign isn't changed
holy shit this class sucks
nah it's just some stupid rules
and how it affects the determinant
it's not just random rules, it's derived results from the properties of determinants
you could figure them out yourself
by testing on simple matrices like 3x3
yeah then don't blame the class for your apathy
put effort get results man that is all it is
rip
linalg is useful in QM
and all the application oriented extensions
quantum computing
ML in general too
half the stuff that comes out of my profs mouth is bs
never will i use this crap
after i graduate
what are you majoring in?
Engineering
oh rip
yeah this is just plain useless to us
oh
ye then
they must be
except if any entry is 0
if one row is all 0s
and the other is all 2s
you can't write the row of 2s as a scalar multiple of the row of 0s
idk
uh
linear algebra useless in engineering?
yikes
not just ML and quantum computing; there's electrical engineering, where it's used extensively to analyze circuits, statistics, control theory, mechanical engineering
Yo mamma wasn't aware of the EEE applications
well, yeah that too
$T(a_2x^2+a_1x+a_0) = (x^2-1) \cdot 2a_2 + x(2a_2 x +a_1) +a_2x^2+a_1x+a_0$
$T(a_2x^2+a_1x+a_0) = 5a_2x^2 + 2a_1 x + (a_0-2a_2)$
Abhijeet Vats:
So, that's your new polynomial after applying the transformation
OH I see that
In other words:
$T(a_0,a_1,a_2) = (a_0-2a_2,2a_1,5a_2)$
but I don't see how I can get a matrix out of that
Abhijeet Vats:
I know you can but i'm slow
So, find the images of the standard basis vectors and they'll form the columns of your matrix
@smoky lagoon Do you understand that?
oriented differently obviously
Wait what the fuck
so would I just put that basis in r3 into the polynomial?
Abhijeet Vats:
No, you already have a formula describing the transformation
okay so what's my next move
Like, you know exactly how the coefficients change, by virtue of the derivation I did earlier
right right that makes sense
So, find out how the basis vectors change and you're done. You don't have to worry about the polynomials they make up
As far as we're concerned, those polynomials are entirely described by the coefficient vectors.
T(1,0,0) = (1-0,0,0) = (1,0,0)
hold on
Sure.
I mean, you're using the formula above, right? So just make sure you're computing things correctly and it should be correct
cool! could you explain the logic on finding the polynomial in the first place?
Now, just check if the initial transformation was correct. I did it rather quickly and it's 3am here, with me falling asleep so try to check it through thoroughly.
Finding the polynomial?
sleep mate, sleep
the inital transformation
Well, a transformation is nothing but a function
That's all it really is
So, your function was defined in a particular way in the problem above
ah you use the transformation as your y and then do the derivatives as such
and t hen put it in for y* and y**
I took the most general polynomial that I was allowed to use and found the image of that general polynomial.
Yes, precisely.
interesting
That allowed me to get the polynomial at the very end. Now, we initially agreed to talk about polynomials in terms of a vector that would have the coefficients of the polynomial as its components
So, that's why I got the transformation into the vector format above
Once that happens, finding the columns is easy
the first COLUMN is (1,0,0) and the second would be (0,20) and the third would be (-2,0,5)
or would those be the rows?
The former
There's a beautiful treatment of precisely this topic in Klaus Janich's Linear Algebra textbook, where he derives the fact that the images of the basis vectors form the columns of the associated matrix. That discussion was a delight and you should definitely check it out.
I might have to check it out then
what's my game plan here?
wait
I can use the original transformation
I know that a0=1, a1=1, and a2=1


it's a rare hankel
let the unknown quadratic be y=a_2x^2+a_1x+a_0. rewrite y as the column vector (a_0,a_1,a_2) and x^2+x+1 as (1,1,1) (imagine these are column vectors). let A be the standard matrix of the map T. part c is solving the system T(a_0,a_1,a_2)=A(1,1,1)
If the quotient space V/U of a vector space V with respect to subspace U is finite dimensional, can we assume that V is also finite dimensional?
Probably, right?
Might just say that it’s clear and call it a day tbh
It feels pretty false to me, but idk
Guys i dont understand why Det (u - xIn) = 0 is equivalent to X belongs to sp(u) ?
Uhh idk I feel like V/U couldn’t be fin dim if V wasn’t
I think V/U would have to fill up all the infinite dimensions if that were the case?
HELP
If U is a vector hyperplane of V, dim(V/U) will be 1 @shrewd slate
regardless of dim(V)
You're welcome

idk what you're calling Jordan, but the minimal polynomial of T divides X²-1, so it has only simple roots @pastel saffron
ya, that works as a pretty simple proof
you do have to specify that the minimal polynomial of T has distinct roots so it's diagonalizable
yeah, i mean, invertibility doesn't really say much about diagonalizability.
Back to Bunchuong’s example where dim(V/U) = 1, would it be appropriate to say that if B_1 is a basis for U and B_2 is a basis for V, then
B_2 = B_1 ∪ {v}
For some v ∈ V?
if you take two arbitrary bases like this, it's very unlikely that B_2 has all the vectors of B_1
from U being a hyperplane of V, you can have the existence of v in V such that B_1∪{v} is a basis of V
I was thinking of B_2 as an extension of B_1, I should’ve mentioned they’re not both arbitrary
But yea, what you said is what I meant, thanks!
Looks like my proof can be saved after all
help pls do I just dot product them, then what do i do with the dt
do you know what a derivative is
...
are you not able to take the derivative of a scalar quantity
$A \cdot B = 5t^2 \sin(t) - t \cos(t)$
Ann:
$\dv{t} (5t^2 \sin(t) - t \cos(t)) = ; ?$
Ann:
what exactly are you asking?
If that is true for all vectors a, then T must be self-adjoint
what are you even asking
on the field of R, is <a, Ta> = <Ta, a>
inner product is symmetric
so yes, <a, Ta> = <Ta, a> for all vectors a and operators T
this is fun for making machine learning algos
Need help
This algebra 2
yea. its not linear algebra tho
#prealg-and-algebra or #precalculus
@slow scroll
those channels are where high school algebra goes, yes
yo can somebody help me with linear algebra

who??
type your question in the channel, and someone might help
Does every nonzero linear transformation from Rn to itself has at least one nonzero eigenvalue?
what are the eigenvalues of a rotation matrix?
think about it: what points are fixed under rotation about the origin in R2
the origin
so.. 0 is an eigenvalue. are there any others?
uhhh
thats it. So a rotation matrix from R2 to R2 has only one eigenvalue: 0
this is the rotation matrix
to get the eigenvalues, you do the rotation matrix subtracted by yI
then set the determinant equal to 0
correct
yes. Note: it DOES have eigenvalues in C, but not in R\{0}
that means
y^2 - 2ycos +1 =0
0 can't be an eigenvalue
there are no eigenvalues in the rotation matrix
@slow scroll
yeah youre right. I was assuming 0 could be an eigenvector, which is false.
but yeah, you can show that the characteristic polynomial never has real roots.
Let A=PDP−1, where D is a diagonal n×n matrix. If B is the basis for Rn formed from the columns of P, then D is the B-matrix for the transformation given by left multiplication by A.
What does this question even mean
I don't see a question, but its talking about diagonalization. Have you heard of that?
yeah, on second look, im not really sure what its talking about either 🤷♂️
it could be saying that D is just A in the basis of B, which would be true
Can Two matrix representations A and B of a linear transformation T can have different eigenvalues?
@everyone
could you give an example of a linear transformation T with two distinct matrix representations?
let $\begin{pmatrix}a&b\c&d \end{pmatrix}$ be some real matrix without complex eigenvalues. Then let $z = a + bi$ and $w = c + di$.
@slow scroll what
kxrider:
wat?
Look closely at what I wrote: in other words, the problem is reduced to: is there a matrix with real entries (nonzero in the second column) that has no complex eigenvalues?
So... lets take a matrix like $\begin{pmatrix}1&1\1&1 \end{pmatrix}$ and compute its characteristic polynomial.
kxrider:
what would its eigenvalues be/
hmm that aint right
what..
what did you get for its characteristic polynomial?

npnp. so there are no complex eigenvalues.
All that is left to do is let z = 1 + i and w = 1 + i and there is your counterexample
So recall this. Re(z) = 1, Im(z) = 1 and Re(w) = 1 and Im(w) = 1
Re(z) and Im(w) are always real numbers
Re(z) = real part of a complex number z
Im(z) = imaginary part of a complex number z
so if z = a+bi
then Re(z) = a and Im(z) = b
nah, Im and Re are always real numbers
yea, but any complex number has the form a + bi where a and b are real.
oh
so the answer is false
because if you have a matrix filled with 1s
then you get eigenvalues 0 and 2
yep i.e. it fails when z = w = 1 + i
you just need to find a basis of eigenvectors of A. Then Q is the matrix which takes vectors from the standard basis to that basis of eigenvectors
i hate coronavirus no teachers to help me
this is because you have $\vec y_{k+1} = D\vec y_k = DQ \vec x_k$ where $D$ is diagonal. It should at least remind you of $PDP^{-1}$ diagonalization stuff.
kxrider:
how did you get that?
the eigen vectors are 1, 0
and 1, 1
standard basis vectors are 1, 0
0, 1
so i just formed the transformation matrix with that
close: that is the matrix that sends vectors in eigen basis to the standard basis: i.e. that would be Qy = x. You need Qx = y.
all you have to do is take the matrix you came up with and invert it. Then that matrix would send vectors in the standard basis to vectors in the eigenbasis (1,1), (1,0)
i agree
kxrider:
i suggest watching this video as well https://www.youtube.com/watch?v=P2LTAUO1TdA&t=
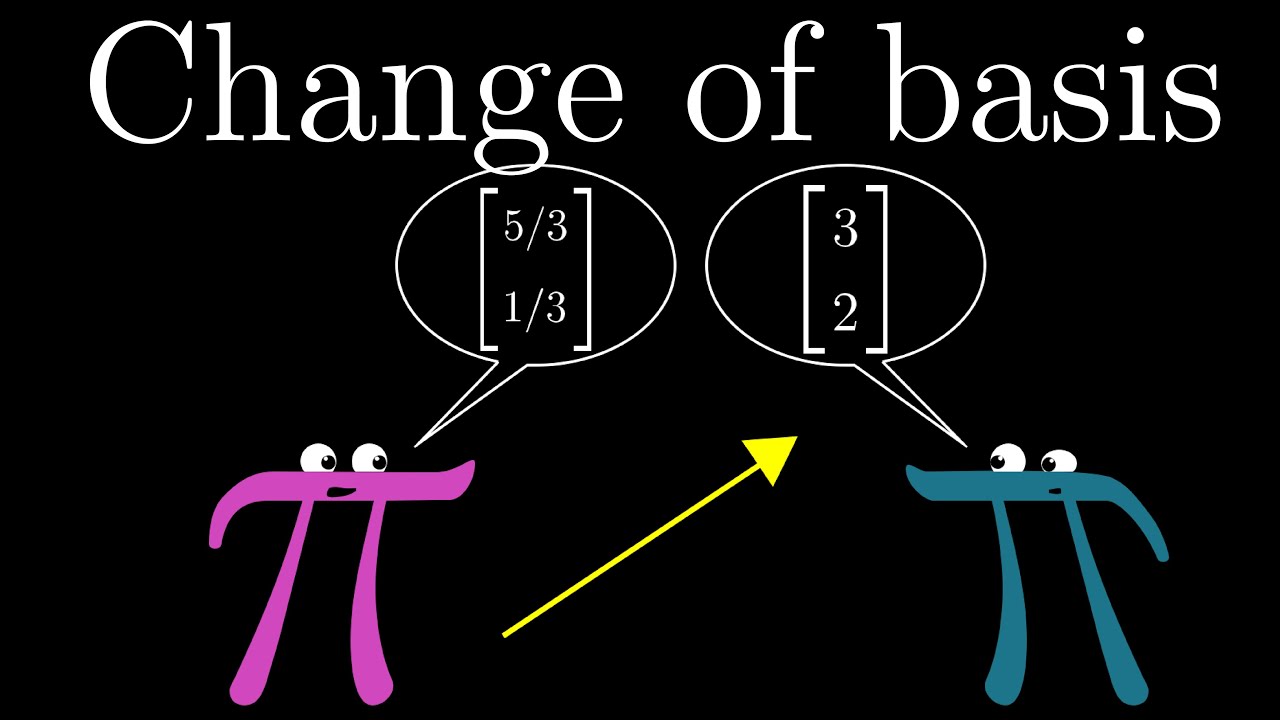
Home page: https://www.3blue1brown.com/
How do you translate back and forth between coordinate systems that use different basis vectors?
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through Patreon, where supporters get early access a...
I think the fourth one is wrong
But can anybody help confirm that the answers to these are
T, T, T, F, T
I think I've logic-ed through it but I may have made some mistakes in my thinking
<@&286206848099549185> I didn't know you couldn't ping helpers until after 15 minutes until I just looked over the faq again, so I removed my original tag. Sorry guys
hey team i have set up the intergral but I dont know what to make the intergral limits, was looking for some help
hi, I am new here and my math is very basic(I presume) where do I send it ?
@dusky epoch i have no idea
(0,0,0) corresponds to t=0, (1,1,1) to t=1.
@hidden arch if you're not sure, send it in one of the ten questions channels that aren't occupied
Thank you and sorry for doing that here
@dusky epoch if the second point was say (1 , 2, 1) would it sitll be t= 1
i dont understand the second part
it wouldn't even be on the curve {x=t,y=t^2,z=t^3}
o right i kind of see what you mean now