#linear-algebra
2 messages · Page 69 of 1
right
a + b is not equal to b + a
the question asks you to give a counterexample
in this case
would it be any a + b considering it says [a1 + a2, b1 + 1]?
so [5,2] + [3,2] is not equal to [3,2] + [5,2]
not quite any, but most, correct
in this case, your counterexample actually doesnt work
$\begin{pmatrix}5\2\end{pmatrix} \oplus \begin{pmatrix}3\2\end{pmatrix} = \begin{pmatrix}5+3\2+1\end{pmatrix} = \begin{pmatrix}8\3\end{pmatrix} = \begin{pmatrix}3+5\2+1\end{pmatrix} = \begin{pmatrix}3\2\end{pmatrix} \oplus \begin{pmatrix}5\2\end{pmatrix}$
Namington:
but let's say we changed one of the b values
$\begin{pmatrix}5\2\end{pmatrix} \oplus \begin{pmatrix}3\3\end{pmatrix} = \begin{pmatrix}8\3\end{pmatrix}$
Namington:
$\begin{pmatrix}3\3\end{pmatrix} \oplus \begin{pmatrix}5\2\end{pmatrix} = \begin{pmatrix}8\4\end{pmatrix}$
Namington:
and, of course, $\begin{pmatrix}8\3\end{pmatrix} \neq \begin{pmatrix}8\4\end{pmatrix}$
Namington:
right
so $\begin{pmatrix}5\2\end{pmatrix}, \begin{pmatrix}3\3\end{pmatrix}$ are a counterexample
Namington:
(and you'd show why they're a counterexample - i.e. show that a+b and b+a are not equal, as I did)
that said, you did make an observation that, if the bottom entries are both 1, then they do follow the rules - so that means that, while the entire set isn't a vector space
part of it does follow the rule
in order to show something isn't a vector space, you just need to find one counterexample
as it turns out for this problem, most pairs of vectors will be a counterexample
if b_1 =/= b_2, then their sums won't commute (hence breaking the rule).
right
thank you, i appreciate it, i think the general idea of it makes sense, i'm going to try more problems to practice.
Namington more like epicton
we know regular vector addition and scalar multiplication in R^n
is fairly well-behaved
and we can do a lot of fancy things with it, as you might've already seen (or if not, you'll see later in your course)
but it feels kind of... restrictive to only talk about "known examples" like R^n with basic addition/multiplication
and, indeed, by thinking about how we can "generalize this"
by establishing a few rules (10 or so) that we expect all vector spaces to follow
we can apply many of these "powerful results" to far more abstract structures
this has plenty of applications, both in mathematics and in the sciences
one example provided by your note is the vector space of polynomials of degree n
At most n?
right, sorry
degree at most n
otherwise it's not a vector space!
consider for counterexample, the set of polynomials of degree 2
and the vectors x^2 + 1 and -x^2
then, (x^2 + 1) + (-x^2) = 1
but 1 isnt a polynomial of degree 2
so this set isnt closed under addition
and hence not a vector space
so yeah, thanks for the correction
Does degree 0 work? I think in my course we defined 0 to have deg -∞
we often define 0 to have a degree of -infty, yes
if you use this definition, "vector space of polynomials of degree 0" doesnt make sense
as 0 isnt in that set
but uh... idk why you'd talk about $\mathcal{P}_0$
Namington:
True
just talk about $\bR$ like a normal person
Namington:
(or whatever scalar field you're using)
I was just wondering if it really was the case that it always has to be AT MOST
i believe so, yes
Does seem like it
Namington:
this is just the vector space consisting of only the 0 vector
which is trivially a vector space
but also yuck
That seems kinda silly with - ∞
Yea
if you see someone write $\mathcal{P}_{-\infty}$, you hereby have Namington's executive permission to bash them on the head
Namington:
sadly, my permission does not transcend legal ramifications, although I'm sure if you tell the judge they'll be understanding.
Namington, what’s the deal with direct sums of more than two subspaces
"How do you plead?"
"Guilty, but I deserve a pardon because the guy totally deserved it; he said 'consider the vector space of polynomials of degree -infinity!'"
"Ah, justified then. Court dismissed"
It's just (U ⊕ V) ⊕ W
or equivalently, U ⊕ (V ⊕ W)
it works exactly the same as a direct sum of two subspaces
Yea that’s what I assumed
It’s weird that it’s not mentioned in my book
Just for two
because all operations extend in this way
i dont think theres anything interesting to say
(all associative operations)
It’s just that in a later chapter (the most recent one we’re on), they mention that a sum is direct ⟺ their dimensions add up normally
Then they prove that using Rank-Nullity’s and products of vectors
What's your point?
It should be able to be proven using the dimension of a sum + the fact that the intersection of direct sums is 0 and the dim of that is 0
And in a much earlier chapter
Ok like 1 chapter earlier but still
proving anything with rank-nullity is cooler
since i mean, "rank-nullity" is a snazzy term
Also what you're saying only goes one direction I think
Or maybe its that you might have to use rank-nullity to prove the fact you stated?
The dimension of a sum of subspaces?
I guess it doesn’t matter much anyway as long as I know
they each used their own basis in specifying the locations of the mug and the plate
the confusion resulted from max specifying a pair of coordinates in his basis that lily interpreted as the same pair of coordinates in her basis, which translates to a different location on the table
should I specify using e1 and e2
because this is in R^2
How would I mention their difference in basis vectors tho?
I need some extensive help and explaining with an assignment
If you have time, toss a dm
🤔
Under which assumptions is a symmetric (not hermitian!) complex matrix $Z\in\mathbb{C}^{n\times n}$ diagonalizable? $\left[ \begin{array}{cc} 1 & i \ i & -1 \end{array} \right]$ is a counter-example I've seen quite often, but its eigenvalues are both zero. So what if we assume that all eigenvalues have positive imaginary part, i.e. $Z$ is invertible?
mathDE:
For the rotation transformation matrix, if the direction is specified the sign doesn't matter rght?
If I wanna solve an augmented matrix does it have to be in reduced echelon form?
You mean, solve a linear system represented in an augmented matrix?
reduced row echelon form would help
Yeah
that's what I mean
1 3 -2
-4 h 8
how would I solve for h?
I ended up reducing to this
1 3 -2
0 (-12+ h) 0
would I need to turn 3 into 0?
what is the question you're asked
determine the values of h such that the matrix is the augmented matrix of a consistent system
okay great
this is the key piece of information
and yet you omitted it at the start
but ok
the -12+h should have been 12+h
and as written this system seems to be consistent no matter the value of h
that does not make any sense
I'm always use to reducing a matrix into reduced row echelon form
If you don't reduce it fully can you still find x1 and x2?
why couldn't you
it'll take a little bit more work but you can do it no problem.
unless you're allergic to basic algebra ig
1 h | 2
4 8 | k
What values would h and k have to be for the solution to be a) inconsistent b) unique c) have many solutions
I can reduce the matrix to this, but not exactly sure what to do after
1 h | 2
1 2 | k/4
I think I understand how it can be inconsistent. if h is 2 and k/4 isn't 8 then it's inconsistent
Not sure about unique and have many solutions
that would be really appreciated!
consider a basis of W
aight some basis ${v_1, ..., v_k}$
Nicholas:
oh fuck @dusky epoch thank you so much. That was a trivial observation, I'm a dumbass
Find the transformation matrix of T, where T: R^2 -> R^2. Where T rotates points (about the origin) through -pi/4 radians (clockwise)
the rotation should be in counterclock wise, but I'm not sure where -pi/4 would be
is it ok to post memes here?
ok thanks
How's Linear Algebra is it hard?
if you have that condition to be true for all eigenvalues then you can diagonalize your matrix
What are you asking then?
I would say for anything, doing it yourself is always the best way to learn it
As with most math, doing your own investigations is usually the best way to learn. Linear algebra has some amazing theorems, try to reason them out. Notably, every vector space has a dimension. Why?
And stuff like that
You maybe haven't seen exotic examples of vector spaces, and that may be your confusion
You invent whatever scalar multiplication and vector addition you want. It just has to obey those 8 axioms
I'll invent a strange one right now. Do you know modular arithmetic by chance?
Yeah! So let's say we work with the integers {0,1,2,3,4} in mod 5 arithmetic. This actually fits all of the axioms that scalars need to satisfy
For the vectors, let's say we have a list of 3 numbers mod 5. So something like (2,4,0)
This all comes together to form a vector space
However, if I did the same stuff all mod 4, it would not be a vector space because the scalar 2 has no multiplicative inverse
I know this might be a little bit much to take in lol. Abstract algebra gives a lot of great examples to make vector spaces with
Basically, these properties are not assumed - they come from the algebra stuff you are working with. It's very easy to choose similar stuff and NOT make a vector space with it
That's a much better way to say it, yeah
Sadly, for the "regular" vector space on R, you can't prove these properties. They are pretty well assumed
That shouldn't be how it is, but R is too complicated to really prove things with at this level
Ha ha, nice pun
R is difficult to construct. The worst part of any analysis course is actually defining R, then discussing addition and multiplication on it.
In this sense, C is simple. Once you have R, you create C by an algebraic extension. Simply take R, say i² = -1, and you have C
well you need to do a little more
but yeah
(you can also define C linear algebraically by considering matrices {a&b\-b&a})
but yeah, constructing R properly is hard
and showing it has all these properties
that we expect the reals to have
for example, how do you define real exponentation?
like $\pi^{\sqrt{2+e}}$
Namington:
how do you know this "works"?
how do you know it "behaves"?
eg $\pi^{\sqrt{2+e}} \cdot \pi^{5} = \pi^{\sqrt{2+e}+5}$
Namington:
all of these properties, you cant exactly take for granted
they're generally left out of a linear algebra course though
constructing R and proving basic properties is usually reserved for introductory real analysis
once you have R, R^2 and R^3 and whatnot are all trivial
but getting up to R is tough.
Off the tangent, this is a let down of your Lin Alg course right now. It's hard to see why the 8 axioms may fail, because you are always working on an algebra where they just assume that they hold.
as an example of a vector space thats a bit more abstract, but is actually useful
consider the set of polynomials with rational coefficients
Oh yeah, should have brought up polynomials
we often denote this $\bQ[x]$
Namington:
as it turns out, these polynomials form vectors
with rational numbers being scalars
and indeed, this behaves perfectly well as a vector space
even if its a bit esoteric, arithmetic behaves exactly as you'd expect
but what if, instead, we talked about the polynomials with natural coefficients? say $\bN[x]$
Namington:
here I'm taking $\bN$ to include $0$
Namington:
but even then, we don't have a vector space structure, because most polynomials dont have a negative
like x^2 + ??? = 0
clearly, that'd be -x^2, but -1 isnt natural
so -x^2 isnt in our set
hence, $\bN[x]$ isnt a vector space
Namington:
alright, so that was an example where addition and multiplication still worked
"as we expect"
but this doesnt necessarily always hold, either
let me think of an example
yes
$\bR[x]$, for exmaple, forms a vector space
Namington:
because we're allowed negative coefficients now
-x^2 is in R[x]
but -x^2 is NOT in N[x]
so N[x] is not a vector space
R[x], as it turns out, is.
(in fact, if youve taken some calculus, we can talk about vector spaces of power series, R[[x]])
x^2 would be a vector
R[x] is the vector space
it's not a subspace because its not a vector space
it's a subset that does not form a subspace
yes
they need to have internal vector space structure
I'm a huge fan of mental shortcuts. Understand the rigor, but "vectors space within vector space" is bae
x^2 is not a vector space
as i said
it's a vector
in the vector space R[x]
(or in N[x] or similar)
N[x] isn't a vector space
There is the vector space of all quadratics in R[x]
uh
Which is a subspace of R[x]
Yes
ok good
Oop should have been more clear
All polynomials of degree ≤ 2 is a subspace of R[x]
form a vector space
ok, let me refocus a bit
the general theme is
you're kind of taking the nice properties of R, R^2, etcetc "for granted" a bit
but mathematicians often want to apply tools from the study of one area of mathematics
to the study of another area
to do this, mathematicians generalize
we see that R^n obeys all these nice properties
but we also see some similarities between these properties and, say
the structure made by considering certain functions on a set to a field
as it turns out, these structural similarities can be unified under the definition of a "vector space"
this is far from the only structure mathematicians do this with, but it's generally the one students encounter first (for historical reasons)
the advantage is that, if we prove something about an arbitrary, abstract vector space
it now applies to anything that follows the same rules as a vector space
for example, an injective linear map (a well-behaved function between vector spaces) from F^n to k^n is always surjective
this holds regardless of what vector spaces we're considering
and indeed, this is a bit more powerful in that (assuming finite dimensional) we can represent these linear maps as a matrix
cutely enough, this applies to any linear map between vector spaces
which means we can find a matrix representing... well, differentiation
as a nice, calculus-ey example
indeed, if we consider the space of polynomials of degree at most n, denoted $\mathcal{P}_n$
Namington:
the matrix of the derivative operator in $\mathcal{P}_2$ is $\begin{pmatrix}0&1&0\0&0&2\0&0&0\end{pmatrix}$
Namington:
in $\mathcal{P}_3$, it's $\begin{pmatrix}0&1&0&0\0&0&2&0\0&0&0&3\0&0&0&0\end{pmatrix}$
Namington:
the pattern continues from there
this might seem like an overcomplicated way to talk about the polynomial derivative
but it's nice, because now if we know theorems about general matrices in a vector space
those theorems apply to the derivative!
(at least the polynomial derivative)
as a quick example, one can find that these matrices are noninvertible
hence the derivative doesnt have an inverse
we "fix" this problem when taking antiderivatives by adding a +C
we can also find matrices representing repeated differentiation by taking higher powers of these matrices, etc.etc.
anyway, thats a bit of a side tangent
I was just kind of trying to "motivate" this abstraction
the basic idea is, the "rules" of a vector space let us know what "rules" we can use in proving theorems
and because all vector spaces follow the same "rules"
we know that our theorems appl yto anything that can be regarded as a vector space
if you take some higher-level math or physics, youll probably hear the term "hilbert space"
which is a very important object in physics
and part of the reason it's so important is that, well, it's a vector space
which means we know a lot about it
just from knowing that it obeys these 8 basic rules
of course, we can study it further in its own right
(e.g. we talk about inner products, we talk about completeness and calculus, etc.etc. which something like (Z/nZ)^3 wouldnt have)
but these linear algebra connections give us some very deep reasoning ability
as well as letting us easily compare different vector spaces and potentially find connections
for example, the space of complex numbers $\bC$ can be thought of as the space of matrices ${\begin{pmatrix}a&b\-b&a\end{pmatrix}\mid a, b \in \bR}$
Namington:
with standard addition/multiplication
so this gives us a relationship between a specific subspace of $\bR^{2\times 2}$ and the very important structure $\bC$!
Namington:
(we call such a relationship an "isomorphism")
anyway, i kind of threw a lot of information at you
and its probably more "abstract motivations" than "concrete useful stuff"
but I hope this helps contextualize why we care about whether something is a vector space
vector spaces have a lot of really nice structure
in fact, it's often quipped that "No one understands modern mathematics. Because of this, mathematicians spend all their time trying to reduce math problems to linear algebra problems. Linear algebra is the only math anybody really understands."
this is obviously said in a joking tone, but there's some truth to it
if you can reduce a problem to a linear algebra problem, it becomes a lot easier to solve, generally speaking
we know a lot about vector spaces
Indeed, the standard model of subatomic physics is built using groups (another type of mathematical structure) of matrices from certain vector (sub)spaces.
not always, but it's a common "tool" in a mathematician's (and physicist's) toolkit.
in a sense heavily dependent on context, yes
and the reason is that vector spaces have a lot of deep, nicely-behaved, well-studied structure
so rather than developing a whole new theory from scratch
see "can i talk about this in terms of vector spaces, and use what i already know about those?"
im simplifying the process radically, of course
but thats the broad motivation.
[indeed, in order to apply vector spaces to more settings, we often imbue them with some additional structure - such as an inner product, a norm, a topology]
[for example, the euclidean norm lets us do geometry on R^n by formalizing the concept of "lengths".]
bc sometimes your problem necessitates seeing if your nonhomog system even has a solution in the first place
,,,, i feel you're ever so slightly overthinking all this and i'm too tired to properly address that overthinking
does anyone know how to do these?
In this chapter we will look at solving systems of differential equations. We will restrict ourselves to systems of two linear differential equations for the purposes of the discussion but many of the techniques will extend to larger systems of linear differential equations. ...
i need help im doing question a and i got a repeated eigevn value, not sure how to find both eigen values
It does have a section on repeated eigenvalues
uses guess like in the single case... multiplying one solution by t to get the second LI one
hello
i'm trying to wrap my head around eigenvalues
specifically: a matrix must be non invertible to have an eigenvalue
wait
it's
$ A - \lambda I $
Fibbba:
that must be singular
so, why do we want that 🤔
because if a matrix is singular, then the system has no solutions
no
this is what's confusing me
you want Ax = λx to have a nonzero solution for x. yes?
yes
do you see why Ax = λx is equivalent to (A - λI)x = 0
actually i don't
okay
specifically multiplying lambda with I
I is the identity matrix
yes i know
λI is the matrix for the transformation that scales its input by λ
by scales you mean make it longer ?
no, by scale i mean scale
scalar vector multiplication yknow
that shit
there may not even be a notion of length in your space
all i mean is the transformation that sends x to λx, and you keep overthinking it
say we're in 2x2 space
what do you mean
λI scales it because it changes e_0 by λ and e_1 by λ
if you absolutely insist
ok that helps
so we multiply λ by I
to try to reverse the equation
right ?
kinda like working backwards
Ax = λx is equivalent to (A - λI)x = 0
we could subtract λx from both sides to get Ax - λx = 0
that is clear
but the step that seems to be giving you trouble is turning the scalar vector product into a matrix vector product
namely that λx = (λI)x
ah we multiply so we subtract the values only from the basis vectors
no you're overthinking again
🙆
we rewrite it in this way so that we can write the equation as (matrix)*x = 0
the matrix in this case being A-λI
because we have our equation as Ax - (λI)x = 0
😮 i see now
yes
wonderful
so
you still want a nonzero solution for x
if A-λI is nonsingular then this system doesn't have any of those
that make sense?
why
if the first row of A-λI equals the last row of A-λI and first value of x is -1 and the last is 1
isn't that a solution
wait no
if A-λI is nonsingular, the system has a solution
isn't that what we're interested in
ok
but x=0 is NOT what we are interested in.
ah because we want to solve for lambda
but if A-λI is NONSINGULAR, then x=0 is the ONLY solution.
oof
so basically we want to find lambdas that make A-λI singular ?
because then x will not be a zero vector
🤔
because then we will have nonzero solutions for x
and those solutions are called eigenvectors
so basically i interpreted A-λI is singular wrong
what it says is: we want to find λ so that A-λI is singular ?
if your goal is to find the eigenvalues of A, then yes, they are precisely those lambdas
ok i got it, big thanks
multiply the matricies for each one
what's that even supposed to mean
multiply what matrices
the thing thats tripping me up is the (x1+x2) and (x2-x3)
it doesn't matter because the dimensions are wrong
do you know, in general, how to find the STANDARD MATRIX of a linear transformation
I think so
if it was just x1 and x2 and not their sums and difference in front it wouldn't be from r3 ro r3 but
that's obviously not the solution to the problem because it needs to be a 3x3 matrix
Try finding where T maps the standard basis vectors of R^3
i think so
there's no "i think so", either you do or you don't
and it looks like you do not know that to find the STANDARD MATRIX of a transformation, one needs to calculate the vectors to which your transformation takes the vectors of the STANDARD BASIS of R^3, and assemble your matrix out of those vectors as COLUMNS.
or didn't know until now.
how do i do that
do what
compute T(e1), T(e2), T(e3)
what you just said i need to do i'm not sure how to do that
are you able to compute T(e_1), T(e_2) and T(e_3)?
i don't know what that means
$e_1 = \mat{1 \ 0 \ 0}, e_2 = \mat{0 \ 1 \ 0}, e_3 = \mat{0 \ 0 \ 1}$
Ann:
are you able to evaluate T at each one of these?
what is T here
are you able to
yknow
ok
great
then are you able to take the results and assemble them into a matrix
ok maybe i dont know how to evaluate at T
it would just be T in front of each 3x1 vector
Ann:
T
...
...
...
bruh
what do you think T is
is it a number, is it a vector, is it a matrix
what kind of object even is it
it's a transformation but i don't know what that means

"transpose"
how can you,,, be in a linalg class and not know what a (linear) transformation is
very good question
T is, first and foremost, a FUNCTION. in this case, a function from R^3 to R^3.
okay
that's great but I'm just trying to understand it
yeah well this is like trying to understand how to solve a quadratic equation when you can barely grasp how to add two double-digit numbers
in terms of conceptual leaps
so you'd be spending a long long while
i recommend you to revisit your linear algebra class notes. borrow some from a friend or your lecturer if need be
I don't know anyone in my class
I can't read my own writing
and my lecturer is not helpful
he doesn't write most stuff down so im trying to imagine what hes talking about and in doing that
i miss most of the stuff because i dont think quickyl
like i'm looking at the book now
and it's not actually explaining anything
just jargon
It's just a function
They just refer to it by a different name. But $T:\bR^n \to \bR^m$ is just a function.
Abhijeet Vats:
well given that you didn't know what a transformation was until a few minutes ago, i would not expect you to know the construction of the standard matrix of a transformation
I'm just doing problems out of the book because I know I don't understand this stuff
Anyways, just study what it is from your textbook first. Work through it slowly, no need to rush
the first column of the standard matrix of T is T(e1)
the second column of the standard matrix of T is T(e2)
the third column of the standard matrix of T is T(e3)
i know that e1 is
Naz, just read through your text and understand this stuff first
yeah great so well
naz
you're literally given a formula for T
you're literally told in the most direct of ways what the value of T is for every input vector (x1, x2, x3)
dunno
well loo
k
lemme make this real simple for you
dumbed down to the min
$T \mat{x_1 \ x_2 \ x_3} = (x_1 + x_2) \mat{1 \ -1 \ 0} + (x_2 - x_3) \mat{2 \ -1 \ 1} \ \ T \mat{{\color{red}1} \ {\color{green}0} \ {\color{blue}0}} = ({\color{red}1} + {\color{green}0}) \mat{1 \ -1 \ 0} + ({\color{green}0} - {\color{blue}0}) \mat{2 \ -1 \ 1}$
Ann:
$T\mat{1 \ 0 \ 0} = \mat{1 \ -1 \ 0}$
Ann:
for the other two STANDARD BASIS VECTORS, yes.
and those give me the columns of my standard matrix, no?
that's exactly what i've been saying
remember when I said earlier I think very slowly
so this is what I got in the end

to tell if its one to one
i just need to see if has a zero row or a free variable
cuz square matrix one implies the other
well\
I know if its one to one if the columns of the matrix are linearly indepndent
and they are not
so
how was i so STUPID
when is says find A^-2, doesn't it mean (A^2)^-1???
try seeing if you can prove (A^2)^-1 = (A^-1)^2
is the determinant of a 3x3 matrix its cross product?
What does it mean to take the cross product of a matrix?
that sentence doesnt make sense, but there is a relationship between determinants of real matrices and cross produts
indeed, let $u, v \in \bR^3$; then we can define $u \times v$ to be the vector such that, for all $w \in \bR^3$, $(u \times v) \cdot w = \det\begin{pmatrix}\vline&\vline&\vline\u&v&w\\vline&\vline&\vline\end{pmatrix}$
not sure if this was the kind of connection you were thinking of.
Namington:
uh
well no
this is a way of defining the cross product of two vectors, not of defining the determinant
ah
like there are some connections but most of those are just "the algebra happens to work out nicely"
oh ok thanks
Hey guys, could someone give me a starting point to disprove/prove
The column space of the RREF of a matrix A is the same as the column space of A.
I have a hunch that the row operations will affect the column space but no reason behind it...
@slim laurel I'm currently learning this stuff too, but idrk if i'm right
i'm gonna guess u need to
know that rref is sorta combinations of rows of A
span of both columns are the same
i'm not very good at lin alg, so... wait for someone better lol :P
hmm I think the column space are different for RREF(A) and A though
I know row operations does not affect the row space but I believe they do affect the column space
i'm just not sure how to prove it...
well, if you find a matrix such that CS(A) is not equal to CS(RREF(A))
you're done
this gives some immediate ideas
for example consider $\begin{bmatrix}1&0\1&0\end{bmatrix} \in \bR^{2\times 2}$
Namington:
@limber sierra can u plz helps with T/F question in #help-1
oh nvm i think someone answered
the column space of this is the span of the vector (1 1), while the column space of its RREF is the span of (1 0)
which are clearly different
for example, (5 5) is in the former, but not the latter.
{kind=link}
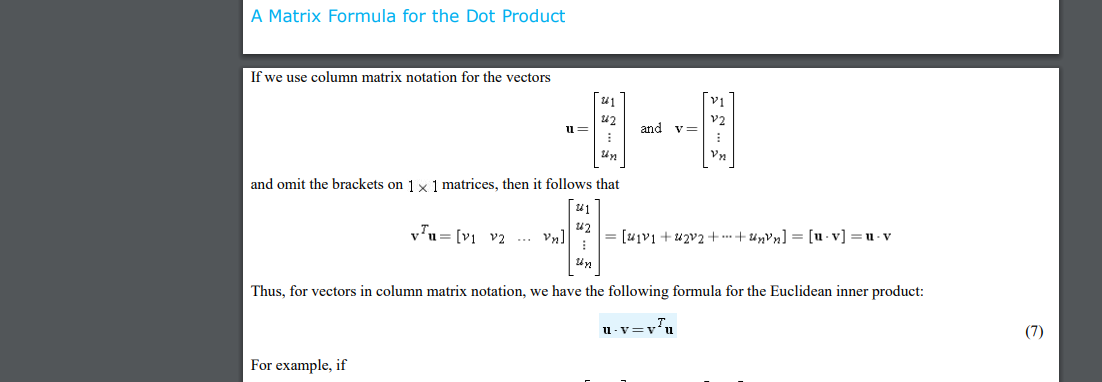
what about omitting the brackets on the 1 x 1 matrices ?
where are those lol
on the very far rhs?
u dot v ?
feel free to at me cuz im looking at the book lol
this is a 1*1 matrix
@radiant meteor
indeed, you can verify this
you're multiplying a 1*n matrix with an n*1 matrix
so you end up with a 1*1 matrix
ahh
and its only entry corresponds with the dot product uv
so when they omit the brackets they're talking about the rhs
yep.
thanks xD
this might not be the right channel for this, but does anyone know of an online course I could take with other people for linear algebra? coursera, udacity are a bust
3b1b has a linear algebra "assist" playlist. It's not an entire course, but if watched alongside a course, will make you better at LA. It's very good
I would be suprised if professor leonard didn't have a full course
I know KahnAcademy does
I more meant with other people where everyone works on the same problems at the same time, etc.
Oh I have no clue haha
I know harvard extension school has courses but they cost a lot of $$$
Hello! May I ask if somebody could tell me what 'margin' in context of matrices means? I'm not a native English speaker.
no clue; do you have the full context?
lets say x is an eigenvector of some matrix corresponding to a lamda. then cx is an eigenvector of that matrix where c =/= 0 and c is a member of the (integers or reals?)
the scalar field
@final forge where are you seeing this term
when we want to write a matrix in reduced row echelon form, that mean we have simplify the elements as much as possible. Correct?
no
simplify the elements as much as possible
is not tightly worded. the criteria for a matrix to be in RREF are easily google-able
too vague
@dusky epoch, one example I remember is here:https://math.stackexchange.com/questions/3233487/states-of-the-world-game-theory-and-beliefs
The part:
'with semicolons representing block margin'

Mathematics Stack Exchange
This post consists on 3 parts: the question itself, hint and a table.
The question will make sense to you only after you have read the tables and the hint attached. The problem is about beliefs of a
@gray dust I have gotten up to this point. Why isnt this enough? why should i go further?
thats what i meant by simplifying.
oh. is it because it must be 0 above 1?
i'm talking about the second leading 1.
one of the RREF criteria is that each leading entry must be the only nonzero entry in its column
the criteria for a matrix to be in RREF are easily google-able
ive already googled. its more confusing. Didn't I figure it out correctly though?
i mean i should get -1/6 to zero and thats it.
arent i correct?
one of the RREF criteria is that each leading entry must be the only nonzero entry in its column
i dont see how whatever ur saying is different from mine...
so yes, you need to reduce the -1/6 to 0.
cool
i said "the first one is obvious since Col(A) is span of columns and 0 vector is in any span AND same with Null space"
but its actually not the same for null right?
wait
nvm A0 = 0
lol
i mean
the nullspace of any matrix is a subspace
of R^n where n is the matrix's col count
right...
The set of all functions with domain N and codomain R
yeah, with no further context there's no reason to assume linearity here
or to assume that N and R are vector spaces
rather than just sets
And such functions are real-valued sequences,
Hello. can someone talk to me about inner and outer products? Inner products of vectors are numbers and their outer products are matricies. I like that symmetry. But the inner and outer products of (square) matricies are still square matricies. So whats the big difference? Why does A^TA help solve the least squares problem? Is it just because A^TA is going to be invertible?
Inner products should always be numbers
Ok, so is A^TA not an inner product?
idk if I'd say that exactly
the entries of A^TA are going to be every possible combination of inner products of the columns of A
like effectively A^TA can be used as something called a Gram matrix which is used to define an inner product, really just like a kind of way of writing a metric tensor
strictly speaking no ok, A^TA is just a matrix lol
Alright. So why does it help solve the least squares problem?
what do you know about it already? you can find derivations of it and lectures about it
it doesn't come out of thin air
Like I get that its square, symmetric, invertible, etc. Which allows a solution to the Normal equations. But, it just seems very convenient that the psuedoinverse*b results in a vector x that gets Ax = b as close as possible
Do you mean like this sort of formula: $\hat{x} = (A^T b) (A^T A)^{-1}$
skippi:
yes but for me in the context of the class I'm in it is $\hat{x} = (A^T A)^{-1}(A^T b) $
RamJam413:
where (A^T A)^{-1}(A^T) = A dagger, the psuedoinverse
it doesnt depend on the pivots right? Just if the determinant is non zero?
what do pivots tell us about the column vectors of a matrix
and what do the column vectors tell us about the determinant
Just tells you about the solutions
I mean the pivots wouldnt matter to invertibility
Oh wait it would it would
You would need exactly n pivots for an n by n matrix to be invertible
@brittle fog I'm just being dumb, what you wrote is the correct formula
The intuition I was taught in class was to compare it to vector projection.
Oh, wait. Does it just put it where vector b would be if it had (m-n) fewer dimensions?
uh @gloomy arrow yes but why
Uh... I don't understand
Does it project b onto the column space of A and then solve for that?
@feral grove I was looking at my notes and remembered the invertible matrix theorem
RamJam: I had to do some reading, but yes that sounds correct
ah i mean ok, appealing to a theorem is an answer i suppose
@feral grove What were you looking for?
i mean idk i was just wondering if you had some intuition for why this should be true
what does this sentence mean?
columns```?I think they just mean one row that's a scalar multiple of another row
or ditto for columns
okay bois I'm at the airport, and I don't have pen and paper, and I'm just trying to code something up really quickly
So here goes my question:
I have a vector in R^3. I want to find an orthonormal basis for its orthogonal complement. Is there a closed-form expression for this orthonormal basis that I can translate straight to code?
Obviously, I could write a rather mundane procedure:
- Determine a basis for the null space of v^T.
- Use Gram-Schmidt to find the orthonormal basis.
but I'm just a bit lazy
what about 3x3 matrix? should all three be multiple of each other or only two?
for a 3x3 matrix, linear independence is not as simple
Can you subtract a matrix with a scalar?
can you show me what that operation would look like?
Oh I meant a vector not a matrix
can you show me what that operation would look like?
I have no clue what it would look like
I believe it works when I'm using python so every value in the matrix just gets subtracted using the scalar
if A is a matrix and c is a scalar then this operation
every value in the matrix just gets subtracted using the scalar
can be written as A-(matrix of same size as A, with all entries being c)
Hey guys!
I'm a bit lost on how to decide which are linear
Would love some help ^^
hit up the defn of linear map
I understand that they must preserve the operations of addition and scalar multiplication to be a linear map
but I'm not sure how you can check that
write out h(u+v) and h(u) + h(v), where u and v are vectors
Could you show me once so that I may do the others?
u,v are vectors in R^3. let u=(u1,u2,u3), v=(v1,v2,v3). compute h(u+v) & h(u)+h(v)
so u would be (x, y, z) and v would be (x, x+y+z, 0)?
and then you have to show that the computation h(u+v) is the same as h(u) + h(v)?
in the case for exercise A)
let u=(u1,u2,u3), v=(v1,v2,v3)
i don't get it
u1,u2,u3 are the components of u
how to read h's defn: for a vector in R^3 which has components x, y, and z, its image under h is given by h(x,y,z)=(x,x+y+z)
i still don't understand how to compute it
h(1,2,3)=(1,1+2+3)=(1,6)
u,v are vectors in R^3. let u=(u1,u2,u3), v=(v1,v2,v3). compute h(u+v) & h(u)+h(v)
that's to demonstrate to how to plug a particular vector into h
So you just do the same but with variables u1, u2 and u3?
u,v are vectors in R^3. let u=(u1,u2,u3), v=(v1,v2,v3)
this is saying let u be a vector in R^3 with components u1, u2, and u3
one would compute h(u) exactly as i did for h(1,2,3)
so h(u) = (u1, u1 + u2 + u3)?
yes
How does that help me determine whether it's linear?
If I do it for V, i'd just get the same thing but for v
show h(u+v)=h(u)+h(v)
So u + v is just regular vectors additions?
(u1 + v1)
(u2 + v2)
(u3 + v3) or (u1 + v1, u2 + v2, u3 + v3)
for x, y, z components
and then plug that into h?
sure
yeah i know
that's what i was gonna do now
Sorry i'm doing this in a weird order, first time
oh my god it's the same!!
thanks @dusky epoch and @gray dust
Pattrigue:
do you have to show it for scalars too?
i mean yeah you've only shown additivity so far
alright, i got that part down, how do you do with scalars?
show r * h(u) = h(r * u)?
where u is a vector and r the scalar
yes
alright thanks
glad you helped, this made it much clearer than the textbook and videos did
correct? for scalars
👍🏾
thank you!!
why is linear algebra so hard 
did you mean: discrete math
no, discrete math is easy
maybe because it's unfamiliar to you
maybe, but i'd still go through the motions of showing h is linear for practice
yes
this is another way to write a function
for example the function $z\mapsto z^2$ takes an input $z$ and returns $z^2$
RokettoJanpu:
that function would be $f\begin{pmatrix}x\y\z\end{pmatrix} = 3x - y - z$
Namington:
in other words, it maps a matrix (x y z) to 3x - y - z
the symbol $\mapsto$ represents the ``mapping rule"
Namington:
i see, what's with the dot product part then?
an alternate way of writing it
ohhhhh
$\begin{pmatrix}x\y\z\end{pmatrix}\cdot \begin{pmatrix}3\-1\-1\end{pmatrix} = 3x - y - z$
Namington:
by definition of the dot product
yeah they're the same, i see
its just showing 2 alternate ways to represent it
so essentially, show that
f(x1, y1, z1) + f(x2, y2, z2) = f(x1 + x2, y1 + y2, z1 + z2)?
for the addition rule
yes
got it, thanks
To fix up your vocab, a set of vectors S, such that span(S) equals some given vector space V, is called a spanning set for V. If S is linearly dependent, there exists a proper subset of S, let’s call it W, ie we can toss out some elements of S to make W, such that W is linearly independent and span(W) is also equal to V. We call W a minimal spanning set for V or a basis for V
my response to you in #help-1 which you apparently haven't ignored but failed to acknowledge. your answer lies here:
We call W a minimal spanning set for V or a basis for V
work:
asking for clarification is encouraged, but failure to acknowledge responses isn't
preach
if I decompose a 2x2 tensor into symmetric and antisymmetric components
can I express the antisymmetric component as Tik=eplision ijk omegaj
To the best of my knowledge as a result of Cramer's rule
The system you could make can only be solved if the determinant of A is non zero
If you write it in the for
Ab=c
b= [x,y,z]^T
c = [1, 3, 2]^T
[T means transpose, so the actual (1x3) matrix ]
me?
you can alternatively find the value(s) of k that make the rows of the system's augmented matrix linearly dependent
note that row 1+row 3=row 2 but only for a certain value of k
and what if k!=2?
Yeah, it's probably best to do it ^'s way for understanding, maybe Cramer's rule is cheating 🙂
if k !=2 we have a solution?
how many solns?
basically it says a find k for 1 solution , b) find k for infinite solutions and c) find k for no solutions
um just one since its 3 row 3 col
matrix
yeah, the reason being any k!=2 makes the rows of the system's augmented matrix linearly independent
yep
the thing that confused me is that its a bit vague what you get on the matrix
on what k must be equal to
so yeah you had to see for infinite that for k = 2 2nd and 3rd rows are equal
but for no solutions?
i think you can never have no solutions
cant
that's it
I can only get k not equal to 2 by using the row operations 😢
k ≠ -3 should be one too?
Well Cramer's rule gave me k ≠ 2 and k ≠ -3 to make the system solvable
let me see
I even checked online calculator for inputting k = -3 in the place of k
yeah you are right
x = -3 gives 2nd row
0 1 -1 1
and 3rd
0 -5 5 0
so we end up with
0 0 0 5
which is impossible
so with k = -3 we get no solutions
That should be complete now
yep
so i got :
1 0 0 1
0 1 0 1
0 0 1 1
a b c 0
for which a b c 's i get 1 , infinite and 0 solutions
a b c = 0 its 1 solution right?
any a b or c != 0 is infinite
I don't know I'm still trying to find the k = -3 one using row operation
oh lol
how would I find the basis for the equation x-2y+3x=0
we can say a vector in the plane x-2y+3z=0 (that's what i assume you meant to say) has the form (x,y,z)
we can do some algebra to get x=2y-3z and let y,z be free variables. plugging this into (x,y,z) and doing a bit more algebra should reveal a nice basis for the plane
@gray dust so i'm not sure what to do after.
hehexd lol:
the aim is to represent an arbitrary vector in the plane as a linear combo of some vectors. rewrite (2y-3z, y,z) as a linear combo of some vectors
if columns of a matrix are multiple of each other, is that a sign that the determinant will be zero? Somebody said that on slader, and got -7 rating.
yes
if $A$ has two columns that are multiples of each other, then $A^{T}$ has two rows that are multiples of each other
Namington:
hence $A^T$ can be row reduced into a matrix with a zero row, i.e. $A^T$ is not invertible and so $\det(A^T) = 0$
Namington:
and since $\det(A) = \det(A^T)$, the conclusion follows
Namington:
it's also nice to know the interpretation of the determinant as gives you the volume of a parallelpiped with the vectors as sidelenths, so if they share two vectors in common it has 0 volume
thankssssssssss
could someone explain 3b) to me
i'm very confused
on how to do it for another bases..
I did a)
so we know the basis vectors in E is 1,0 0,1
it says 90 degrees clockwise
so after its rotate it becomes (0,1) and (-1,0)
and then just write down a matrix for that
(1,0) rotated by 90 degrees ccw is not (1,0)
i mean
exactly the same way? you still plug the vectors of B into R
and write the outputs in B too
i understand how c) was done, but could someone explain how they did d)? its completely going over my mind
first of all, the origin translated from F_A, shouldnt that be O_B(-3,2)?
why is it (-1,3)?
Hey im stuck on what the question is asking and how to do it
in a system of linear DEs, ie x'=Ax where x is a column vector and A is a constant square matrix, we classify the fixed points of the system by examining the eigenvalues of A
Im having a test on the basic algebra like first chapters with just matrix multiplications , finding the inverse , solving the matrix and writting it in vector also finding if its 1-1 etc. Whats like the hardest exercise i could have?
also the T(x,y,z) = (2x-y,x-2z)
i think i covered everything
well computational complexity can be cranked arbitrarily high
@dusky epoch for the theory i mentioned what would be a hard exercise?
idk lmao like
"here's two 10 by 10 matrices, find their product"
solving the matrix
you mean solving a linear system of eqns by working with its related augmented matrix
finding if its 1-1
by this do you mean determining if a linear map is injective?
I need help with this
I was thinking of writing A1 A2 ... An in terms of coefficients
then multiplying by V
and then saying that since A1V.... etc are lin independent
then the coefficients are zeroes
How will u prove it
ahh I see
cool
what about part 2
My classmates are saying its false
I kind of see it as true
idk why
try thinking up some examples maybe
its hard no?
They're saying there exists
It means that if it doesnt work for one vector
it might work for another
look at 1x2 matrices
mmmm
minimal polynomial @lime bobcat
ye
what if its
set B= [(1,1,0), (2,1,0), and (4,1,0) ]
then this doesn't span R^3 right
what does it span?
i know its on the x-y axis
but it's in R^3, but what else
that spans R2, the x-y plane yea
it doesn't span R3 because it doesn't go some places
but it spans R^2?
i mean yea i can tell it doesn't span R^3 because there can't be a lin combination when the third coorinate (z-axis) is 0
"es, each linear equation determines a plane in three-dimensional
space. When we intersect these planes, i.e., satisfy all linear equations at
the same time, we can obtain a solution set that is a plane, a line, a point
or empty (when the planes have no common intersection). "
How could two planes intersect to a point?
how would i find the basis for the vectors?
idk how to do it for complex numbers
because i would have 10 components, 2 for each vector
and would become a mess
cause i cant manipulate them to cancel out or anything
how would you do it if this was over R instead of C?