#linear-algebra
2 messages · Page 58 of 1
no
from $Ax = b$, multiplying on the left by $A^{-1}$ on both sides gives you $$A^{-1}Ax = A^{-1}b$$
Ann:
which simplifies to $x = A^{-1}b$
Ann:
do we just ignore I in the left hand side then
no
I is the identity matrix
in some sense it plays the role of the number 1 in the matrix world
I see
thanks
sorry for asking a lot of questions trying to solidify my understanding

reddit
https://youtu.be/PFDu9oVAE-g C ~ matrix that has columns as the eigen basis in our language A~ transform that we intend to apply in the...
Can someone please take a look at this question?
Is my arguement right ?
can you state the timestamp at which Grant says $A^{100} = C^{-1}D^{100}C$?
Ann:
One sec
Oh wait, he doesn't actually explicitly write it out, but when he shows us a small recap(15:20) he does C^-1 A C. And then shows us that computation of 100th power is easy.
So he meant, what I think?
Ann:
which is equivalent to $D = CAC^{-1}$
Ann:
What, I don't understand the second one
🤔
C has eigen vectors(,written in our language) as columns, which means it transforms eigen basis to our basis
Am I right ?
@dusky epoch
Man, please make the explanation 3b1b linear transform logic.
C has eigen vectors(written in our language) as columns, which means it transforms eigen basis to our basis
i mean let's put it this way
Am I right ?
not quite.
if e_i is the i'th standard basis vector, Ce_i is the i'th vector in the eigenbasis
so if the input of C is a standard basis vector, then its output is an eigenvector
er.
wait.
i might be getting confused at this shit myself
reddit
- A matrix's columns, tells us how the "basis" vectors (not just i and j hat, but any bases) are transformed. 2. When we represent a vector...
Am I right in this comment
honestly i kinda don't like the word "transformation" due to the amount of confusion it can cause sometimes
Man... But it's sooo... Pleasing.. haha
I was literally in shock, when I first saw this interpretation
That question I sent, again confused me
Algebra's fine... But I don't know why, I never get a satisfaction learning that way :))
alright wait ok
ARGH! I KNEW IT!
i fucked up my formula.
$C^{-1}AC = D$ can be rewritten as $A = CDC^{-1}$, not as $D = CAC^{-1}$!
Ann:
christ, what a brainfart i had there
yeah alright so
so i can attempt to explain this from a transformation point of view
last D should be C but yes
Aravindh_Vasu:
But he never told that though?
yeah he didn't mention that explicitly
i mean tbh not everything can be put in a geometric light as clear as this
and sometimes you gotta do some symbolic manipulations
like that's the entire point of linear algebra
to allow you to not rely only on direct visual intuition
Oh... But when you can use his tool to animate it yourself ... super fun
to allow you to not rely only on direct visual intuition
good linear algebraic intuition isn't just about having a good geometric picture of what's going on, it's about being able to go back and forth between symbols and geometry as needed
Yes it's actually pretty tough to understand Abstract algebra
After having this visual aid
In 2D
Alrighty let me animate this though :))
Is there a channel, where I can post a video for checking, before I post it on YouTube ?
Checking for mathematical correctness
you can put it on YouTube and make it unlisted
And then share it here itself?
Cool thanks. Wow you are so helpful. Seriously, thanks a lot.
Honestly, nobody's been this patient to me. Thanks again.
It does mean that
Quick proof: injective <--> dim Nul = 0 <--> rank = n <--> surjective. Also, dim Nul = 0 <---> 0 not an eigenvalue <---> det ≠ 0 <---> invertible.
@pliant harbor did you catch my clarification last night about your question?
Im having linear algebra on uni this semester. Is it an easy subject and how should i approach it?
I am not entirely sure if this is the correct channel
but could someone explain to me what "skew-adjoint" means?
uhhhhh
my best guess would be that an operator $A$ is called skew-adjoint if $A^* = -A$ but your book ought to have a defn
Ann:
Which of the following matrices may be obtained by performing exactly one elementary row operation on the matrix?
[
\begin{bmatrix}
1 & 3 & 0 \
0 & 1 & 3 \
0 & 0 & 1
\end{bmatrix}
]
A. [
\begin{bmatrix}
0 & 0 & 0 \
0 & 1 & 0 \
0 & 3 & 1
\end{bmatrix}
]
B. [
\begin{bmatrix}
0 & 0 & 1 \
0 & 1 & 3 \
1 & 3 & 0
\end{bmatrix}
]
C. [
\begin{bmatrix}
1 & 0 & 2 \
3 & 1 & 6 \
0 & 3 & 1
\end{bmatrix}
]
D. [
\begin{bmatrix}
0 & 1 & 0 \
0 & 3 & 1 \
1 & 0 & 3
\end{bmatrix}
]
E. [
\begin{bmatrix}
1 & 3 & 1 \
3 & 1 & 0 \
0 & 3 & 1
\end{bmatrix}
]
OPz qt:
ik for sure b
ah formatting messed up
Which of the following matrices may be obtained by performing exactly one elementary row operation on the matrix?
[
\begin{bmatrix}
1 & 3 & 0 \
0 & 1 & 3 \
0 & 0 & 1
\end{bmatrix}
]
A. [
\begin{bmatrix}
0 & 0 & 0 \
0 & 1 & 3 \
0 & 0 & 1
\end{bmatrix}
]
B. [
\begin{bmatrix}
0 & 0 & 1 \
0 & 1 & 3 \
1 & 3 & 0
\end{bmatrix}
]
C. [
\begin{bmatrix}
1 & 3 & 0 \
0 & 1 & 3 \
2 & 6 & 1
\end{bmatrix}
]
D. [
\begin{bmatrix}
0 & 0 & 1 \
1 & 3 & 0 \
0 & 1 & 3
\end{bmatrix}
]
E. [
\begin{bmatrix}
1 & 3 & 0 \
3 & 1 & 3 \
1 & 0 & 1
\end{bmatrix}
]
OPz qt:
so I guess my question is, ik b is an answer d, can be done if one elementary row operation is applied twice, but there has to be another matrix
<@&286206848099549185>
@pliant pollen tell me, what are the elementary row operations?
correct. so you said you know B is an answer. what ERO did you use to get B?
swap row 1 and 3?
swap 1 and 3 and then 2 with new 3
right. now because that's more than exactly one elementary row operation, I would personally rule out D.
there may be, however, one more besides B
A is out
the hint is that it depends on your definition of elementary row operation. I learned that there are two EROs:
- swap two rows
- add a constant multiple of one row to another row
if you accept my definition of ERO, then there's another that you can do with exactly one ERO. but it can't be done with your definition of ERO.
it's probably your definition I need then
ok. so which is the other one that you can get with exactly one ERO (my defn)?
(look carefully, it's there.)
ah c
was row scaling not an ERO for you or did you have to like. take precautions against adding -1 times a row to itself @tardy dawn
and what did you do to get that one?
2 * R1 + R3
bingo! I'm proud of you, you got it.
thank u sm
@dusky epoch I mean, yeah, you couldn't zero out a row on purpose. I omitted that in my definition above.
Hello, just started vector spaces, subspaces, spanning, etc. Have a question
$\mathbb R^{2} is not a subspace of \mathbb R^{3}$
Why is this
Sup?:
Uh, is that what your textbook said?
wdym?
No, the teacher told us to go read about subspaces. Was looking at a video and it said R^2 is not a subspace of R^3.
It also mentioned the reasoning, but I didn't quite understand.
R^2 and R^3 are literally disjoint
they're completely different spaces
and no vector is in both at once
Ah.
not even the zero vector of either space
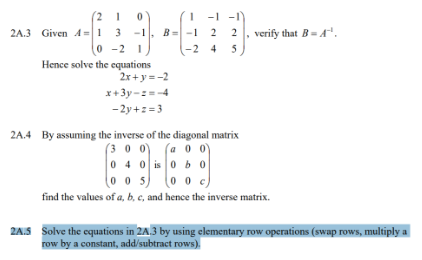
i have highlighted the question in blue
please crop next time
sorry ahahah
this is a pain to view on mobile
lemme take a pic of my page to make things simplet


okay... so where exactly are you stuck @rancid ore
then do it
create an upper triangular matrix
using the basic rules
then solve via back substitution
do it. and then come back and show us where you get stuck.
where i struggle
is getting the upper triangular
we were told to avoid zeros on the diagonal
do it as far as you can. then come back with your work and show us where you got stuck.
ive got like 2 pages of trying different things
i can get it down to one variable away
okay give me a minute
btw
i already know the expected answer as ive solved the equations via a different method for question 3
okay
uh
okay so like
then theres some more tinkering
wait
i feel like im missing something obvious
i tried to keep my steps clear
sorry about the handwriting
found your mistake in the first attempt
"add 2 times the third equation to the second"
you incorrectly calculated 5/2 + 2 * (-2) as 1/2
rather than -3/2 as it should be
but in any case
you went an inefficient and error-prone route
bc you introduced fractions
yeh i feel like theres maybe a row i could multiply by a constant to make it simpler
those are easier to screw up on
you could subtract twice the second row from the first
then switch the first two rows
then subtract the the new second row from third?
wait no
i know once we get to this stage
i should only use row two and three
yes
bruh
hang on
1-6 right?
yeah your second row should be ( 0, -5, +2 | 6 )
you're subtracting 2*(-1).
okay
now you can subtract twice the third row from the second
well your second row should have become ( 0, 1, 0 | 0 )
you can just zero out the entire second column (except for that 1) in one fell swoop
yes so you get (0, -1, 0 | 0)
y=0 yes
got it thanks
its the very first bit i struggled with most
when you didn 2x second from first
i just couldnt see it
@dusky epoch
h
i seem to either get stuck with one variable too many
can this be the last one
or get the upper triangular with wrong answer
yes this is the last one
ill send my opages
ive tried a bunch
This doesn't look like linear algebra.
1 -4 1
2 -1 -3
-1 -3 4
im kind of confused for this one on setting up the pattern
1 0 0
0 1 0
0 0 1
because this one only has an x1 and x2
ususally i deal with x1 , x2 , x3 and solve trying to get the pattern i posted above
Help pleas
e
ping me
Can someone help me with this question? I tried solving the systems but got nowhere
thanks @magic slate but we have only done up to the dot product so i dont think my prof will accept gauss-jordan elimination for this homework
hmm
really?
that was the first thing i covered
but i can try to redo it
well
i dont see how it could be any easier than using gaussian elimination
if he wouldnt accept that could you just rewrite it as a regular system of 2 equations and try some elementary techniques
its equivalent to what i did
but with equations instead of a matrix
@magic slate your name is a word play on the euler mascheroni constant, right?
lol, must be a fellow flammable maths fan
no, I don't think so, this was his first time hearing about it
oh ok
Flammy maths
I oughta get hipster points for having come up with Oily Macaroni 3 years ago.
Also, the question said "Find a,b,c", not "Find a,b,c and tell us how you got them or we'll assume you used blackmail." So you can use whatever method you want, then write down the values that work and verify that they work.
:?
it's kind of implied that you should show your working when answering maths problems, is it not @pliant harbor ?
but the guy was saying that he couldnt use gaussian elimination
which i dont think makes sense
but who knows
I'm confused. I thought a_i is a column vector, wich should be in R^m given that A is in R^(m x n)
There is no mistake
A is an m by n matrix, which means that it has a total of m rows, each of length n
That's why the a_i, which represents one such a row, is of length n
If you've read them yourself, please indicate which parts exactly you have trouble understanding

like i understand how MX=V, and i get the definitions on page 37 and 38, but the part thats confusing me is how they got that MY1=0 says the subseqent vector equation solves the homogeneous system
no the next page is what confuses me
the part after how they solve the original system of equations
the example?
yes
yes
but how do they get that those values for the unknowns solve the homogeneous system
MY_1 = 0
if you replace X with Y_1 in MX = 0, you get a true statement
don't overthink 
ah shit i got it
damn fuck vectors fuck matrices
idk why they have to be so damn important
i love math of all sorts, but i have a love/hate relationship with this particular class
the challenge is fun but sometimes it makes me want to rip hairs out
that's just how it be sometimes
first attempt i got a D. now im redoing it on my own time to understand it
because i want to do ML for a career
i remember my first test in LA i got a 63. it was my lowest grade in math since 3rd grade
honestly i gotta say like... i don't think there's ANYONE out there who hasn't at some point wanted to rip their hair out bc of something they found difficult in math
idek how to visualize these vector and matrix operations. like what does it physically or geometrically mean to multiply a matrix by a vector and so on
i know how to visualize a derivative for example. it gives the slope of the tangent line
3blue1brown has a series in which he visually explains lineal algebra
was incredibly usefull to me
i'll have to check that out

how could i diagonalize this?
Im stuck at getting the eigenvalues
when doing the determinant of nuc(A-kI) i get
(a-k)^2*(b-k)-2(a-k) = 0
and i dont know how to simplify it to get the k
well you can factor out (a-k)
I've come this far
but i cant get the k with the 2n grade equation, im stuck there
I know that given three points A,B and C the equation of the plane contained by all three points is given by the determinant of the above matrix
My question is, why is the top row not simply x y z
As the two other rows are basically direction vectors
<@&286206848099549185>
Hi. I'm asked to check if three vectors in R^4 are linearly independent or dependent.
Vectors are: <1,3,-1,4>, <3,8,-5,7>, <2,9,4,23>. What I did was C1V1+C2V2+C3V3=0, where c1,c2,c3 are constants.
I made a matrix, tried to solve it by echolon form and I'm getting two equations: C1+3C2+2C3=0, 3C3-C2=0.
If c1,c2,c3 are all 0, then the vectors are linearly independent. What I did was take some value of c3 and got back some values of c2 and c1. This shows that not all constants are zero and the equations are being satisfied, therefore the vectors are linearly dependent. Is my working right?
@lone quail Im pretty sure by setting the determinant equal to zero, you are looking for the values of x,y,z such that the first row lies in the plane of the other two rows
Oh alright thanks i think i got it
@quasi vale Thats the way to go but I got another answer by calculating it online
No, they're linearly dependent, but you've how they dependent wrong. It should be https://gyazo.com/f6aefa07391cfeb71dbbe456d774cb6a

Your second row is right
But something is wrong in the first
What I mean is you're supposed to get that C1+11C3=0
Hm
Wdym?
Your first row is not supposed to have any C2's
It’s enough to check that the kernel of the vectors written as the columns of a matrix is trivial. I.e. check that the rows/columns of the REF or RREF are linearly independent
I guess yeah my bad shouldn't have focused on that if the focus was to check linear independence
Yeah it's not in REF or RREF my bad
By the time you write it in REF you should just be able to “look at it”
It doesn’t matter...
What exactly did I do wrong? My row operations are correct
Nothing? Are the rows of the REF matrix linearly independent?
Ok, then that’s all. The vectors are linearly independent. This all comes from the fact that row operations preserve dimension of fundamental spaces. I.e. if the original vectors are linearly independent then the REF of the column vector matrix will be linearly independent as well
Wait a second
Oh you have a 0 row?
Yes, two 0 rows.
and the vectors are 4 dimensional
idk how to code or I would show my matrix
Did you write the vectors as the rows of a matrix?
Yes.
Yea I don’t think you can do that
Yeah he got it right, his vectors are linearly dependent
I wrote the vectors as columns of the matrix
By turning it into rref you can see that x1=-11x3, x2=3x3 and x3 is a free variable therefore the trivial solution is not the only one to your system of equations
By trivial, you mean x1,x2,x3 = 0?
Yes, if the case was that the only solution to your system of equations is x1=x2=x3=0 when you have it in RREF then they're linearly independent
but now you see that x3 can be any real number and x1=-11x3 and x2=3x3
so they're linearly dependent
Alright thanks. And I can also check in REF right? Or RREF is necessary?
REF works
thanks.
Let V=P_3 be the vector space of all polynomials of degree <= 3 over R. Determine whether u, v, w belonging to V are linearly independent or linearly dependent.
U=x^3 - 4x^2 + 2x + 3, V= x^3 + 2x^2 + 4x - 1, W= 2x^3 - x^2 -3x +3
I'm not sure how to write this in matrix form, need some help
well think about what adding polynomials means, and see if there's a way to rewrite them equivalently as vectors in R^4
How'd you know we have to write them as vectors in R^4?
because each polynomial has 4 terms
And we can think of each term as the individual component of the vector?
Sorry if I asked a stupid question. <@&286206848099549185>
oh
Hey.
but yes, we can think of coefficients of the polynomial as entries in a vector
mb i got distracted
np[
so the idea is adding polynomials amounts to adding like terms
Alright, so I can write these 3 vectors as vectors of 4 dimensions
so x^2+1+2x^2+2=3x^2+3, and you can notice that this works the same way as adding vectors (1 1)^T and (2 2)^T
so yes you can write them as vectors and then do all your known operations
oh i meant
(1 0 1)^T and (2 0 2)^T
those are vectors
T means transpose as in we flip it along a diagonal so it's actually a column vector
i'm just too lazy to latex it so i'm writing the vectors which are in R^3 in text
It's necessary to write vectors in column in a matrix?
you could write them in rows but then you'd have to perform column operations
( 1 -4 2 3)^T
np
Wait.
Just one more question.
How is it that we apply row operations when we have vectors as columns and column operations when the vectors are written as rows?
so if we say is a matrix A=(v_1 v_2 v_3) where v_1,v_2,v_3 are vectors in R^3, if we take A^T rows become columns and vice versa, so any row operation on our column vector becomes a column operation on our row vector by transposition
Right some on part b
Let our general vector be $p=ax^2+bx+c$ however is that equal to $p=\begin{bmatrix} a \ b \ c \end{bmatrix}$ or $p=\begin{bmatrix} c \ b \ a \end{bmatrix}$ ?
Brandonhotdog:
not only does that not make sense
the answer is still no
if you meant
${ax^2 + bx + c \mid a, b, c \in \bR}$
Ann:
Ann:
$ax^2 + bx + c$ is not a column vector; it is a polynomial.
Ann:
Yeah, okay to be more specific, a vector space with, as said in the question, has the basis {1,x,x^2}
over the field of R
IF you're considering this space equipped with the basis ${1, x, x^2}$, with the elements of it listed IN THAT ORDER,
THEN the COORDINATE VECTOR of $ax^2 + bx + c$ would be $\begin{bmatrix} c \ b \ a \end{bmatrix}$.
Ann:
You need to pick an order, bases don't come with an order by default
a+bx+cx² ~ [c a b]^T is also an isomorphism
yeah I thought the column vector would have c at the top
it depends on what order you put your basis elements in
ok standard monomial basis
I ask the invigelator what order the basis is and he says go away
so i suppose they're expecting you to use the order they list it in
sets don't have an order by default, you pick an order for these kinds of problemd
okay so in general for a basis ${x_1,x_2,\ldots,x_n} if P=\sum ^ n _{i=1} \alpha _i x_i = p=\begin{bmatrix} \alpha _1 \ \alpha _2 \ \alpha _3 \ \text{and so on} \end{bmatrix}$
eugh bad tex
{1,x,x²}={1,x²,x}={x²,1,x}=...={x²,x,1}
but yes once you fix an order the coordinates go top to bottom
Brandonhotdog:
ok yeah may latex isn't the best but you see what I mean lol
and alright cool
thank you for the help
and I ask this because wouldn't it give me a different matrix for A depending on the way I order the basis?
I have a question. Suppose we have a set S consisting of two 2 dimensional vectors and their span is R^2. Now if their span is R^2, that means they are linearly independent. But for the set S to be the basis for R^2, do we have to prove that the vectors indeed are linearly independent(by C1V1 + C2V2=0, where C1 and C2=0)or can we conclude their independency from the span?
Now if their span is R^2, that means they are linearly independent.
do we have to prove that the vectors indeed are linearly independent
well if you assert that they are
then presumably you have some reason for it
Thing is, I'm watching a video on Khan Academy. We had two vectors and we proved their span is R^2. Now if their span is R^2, what Sal did was prove that they were linearly independent by using C1V1 + C2V2 = 0
But was that necessary?
@vital fjord the columns of A would be in a different order
yeah I thought so, so they'd have the same determinant
The sign of the determinant could change
I ended up getting $A= \begin{pmatrix} 2 & 1 & 0 \ 0 & 1 & 4 \ 0 & 0 & 0 \end{pmatrix}$
Brandonhotdog:
luckily like all great problem sheets (/s) they didn't give us an answer sheet so I can only hope it's right lol
If the columns correspond to D(1),D(t),D(t²) through the appropriate isomorphism to R³ then its correct /shrug
ay nice lol
Also am I right to do $ \begin{pmatrix} 2 & 1 & 0 \ 0 & 1 & 4 \ 0 & 0 & 0 \end{pmatrix} \begin{pmatrix} a \ b \ c \end{pmatrix} = \mathbf{0}$
Brandonhotdog:
But there's nothing God-given consequence-of-universal-laws correct order to {1,t,t²} since sets don't have an order
and then $P= \begin{pmatrix} a \ 2a \ \frac{-1}{2}a \end{pmatrix}$
Brandonhotdog:
The most common one is to pick the order (1,t,t²),notice i change from curly brackets to round brackets
Round brackets imply an order
oh, that cool, and tbh I feel like it's pretty standard for test just to implicitly leave out so much needed info
Uh I'd have to work out what the kernel is, let me see if i can do it in my head
like for example, they never mention over what field their vectorspace in which could affect it, obviously we assume R
yeah, just noticed lol
but the method of doing simultaneous equ to find kernel is the right way to go about it?
If the matrix is already in row echelon form then that's generally the easiest
You can go to reduced row echelon form first if you want
but if they just threw some random matrix at us
I'm calling it row echelon even though the first pivot is 2, some books need all pivots one to be called row echelon
so you reckon in a test that'd be best?
I personally find it easiest usually to go to row echelon and then convert to equations. It's 100% valid to go to reduced row echelon first if that's easier for you
okay cool, thanks for the advice
Really you can try solving the equations in the original form without row operations
Whatever is easier given the context
The field is generally R unless you need it to be C for a problem to be solvable
Lots of problems about matrices of real numbers don't have a solution unless you expand the field to C and consider R as a subset of C in the usual way x <-> x+0i
In particular problems involving finding a change of basis matrix so that A is diagonal or triangular
Those problems are generally only solvable with complex numbers as the field
ayy, yeah I need to learn diagonalizing matrices soon, it's on my test
Yeah so "diagonalize this matrix if possible" problems assume the field is C because it's often impossible otherwise
Sometimes it's impossible even over C and the best you can get is block diagonal
You'd still require C
Yeah, even better actually every matrix is equivalent to a block diagonal triangular matrix with 1s or 0s on the off diagonal
So the one in your picture is worse in that it isn't triangular
This is called the jordan normal form and every matrix is equivalent to one
,w jordan normal form {{2,1,0},{0,1,4},{0,0,0}}
You got lucky here, the jordan normal form is diagonal and you only needed real numbers
,w jordan normal form {{3,1,-5},{6,-4,2},{0,1,4}}
scary
pretty cool though
Also by "qualitative structure" reckon I could just say "The matrix transforms vectors in R^3 to R^2"
or "The solutions of this will be vectors in R^2"
hmm, I think what I just said doesn't make sense lol
"The solutions are the span of 2 linearly independent vectors in R^3"?
I'm not sure if "qualitative structure" means something specific or if they just want your conclusions on it
Back at it again
So I feel like $det(v_1,\ldots,v_{n-1},e_i)$ is like some weird generalised dot product between w and e_i
Brandonhotdog:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
do you know what that sort of thing is called cause I could barely find anything online that had a determinant of a bunch of vectors and info about it
like I know you can write a determinant like that
but like beyond that I don't know what it's good for or how it can be used
@vital fjord I think I figured it out
recall that the orthocompllement of the image of a matrix is related to its transpose in the following way
$(\Im(A))^\bot = \ker(A^\top)$
gfauxpas:
that means that to show w is perpendicular to to v1,v2, ..., v_{n-1}, it is sufficient to show
$\begin{bmatrix} - & v_1^\top & - \ - & v_2^\top & - \ & \vdots & \ - & v_{n-1}^\top & - \end{bmatrix} w = 0$
gfauxpas:
what is \bot ?
orthogonal
perpendicular space
this should make sense because if vectors are perpendicular
but $v \cdot w = v^\top w = 0$
gfauxpas:
so the only way that matrix on w can be zero is if each row v^T is orthogonal to w
Lipschitz, can you help me with equations of subspaces?
no, I have to go actually, i'll be back in like half an hour though. probably.
good luck
np
hmm, I'll have to look into perpendicular spaces but thanks for putting me in the right direction @vast torrent
@vital fjord actually what I said isnt enough on its own 😦
still thinking on it
@ me if you figure it out
Anyone have a good book for learning finite vector spaces? Preferably in an eli5 manner
@honest swift I read and understood the definition of f_a, but I'm not sure how this will help me prove or disprove f=0.
@pliant harbor
There is such an f_a for every element a of the Hamel basis, which consists of your original set B = {(1,0,0,...), (0,1,0,...), ...}) as well as an uncountable number of other sequences. For one such of these other sequences (call it a), the function f_a is then a nonzero functional that vanishes on every vector of B.
@elder creek Have you tried Mathematical Methods for Physics and Engineering by M. P. Hobson? It has lots on linear algebra and other important topics in general
I don't know specifically how much it has on finite vector spaces but I'd stay say the book's worth looking into if you haven't already
does he mean finite dimensional vector spaces or vector spaces over finite fields? 
Vector spaces over finite fields
But no I have not. I just finished calculus and am venturing into linear. Will definitely read. Thanks!
Are the integers modulo (prime squared) a field?
It is a semiring but not sure about field
I assume you already know the integers modulo a prime is a field already
so try to focus on what changes between the two and run through the list of axioms
check them harder
something about going from a prime to a prime squared changes something
@honest swift How do you know that a Hamel basis exists? Are we using the fact that every vector space has a basis?
Yep. (And so the axiom of choice is used, am not sure if you can prove it without.)
Just one small problem. Z^w is not a vector space, so how do we know a basis still exists?
I was convinced it's a vector space, which would wrap up the problem for good, but then I remembered the first axiom of a vector space: "Let F be a field..."
Oh I totally missed that this was over Z^w not R^w lol. Will have to have another think,
Yeah in fact that module is known to not be free abelian, so that argument does not work.
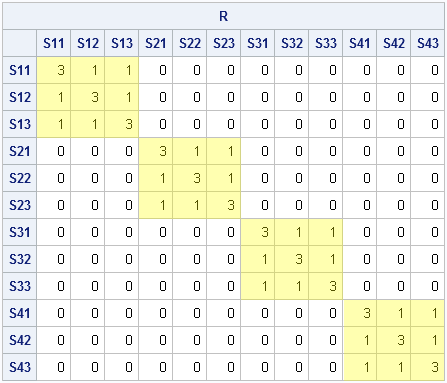
Please do correct me if I'm wrong (linear algebra):
Turning a matrix A into row echelon form (not reduced), shows that:
1. The number of nonzero rows is the rank(A) and also the dim of the row space. Finding a basis for the row space would require finding which of those nonzero rows are linarly independent (or are they all linearly independent?)
2. The pivot columns indicate which respective columns of the original matrix A compose the basis of the column space. The number of pivot columns is the dim of the column space.
3. Turning the matrix Aᵀ into row echelon form (not reduced) would indicate the opposite things:
The rank(Aᵀ) is the dim of the column space, and the pivot columns would indicate which respective rows of the original matrix A compose the basis of the row space.
So, summing up, to find the row space I need to either turn A into ref, and check if the nonzero rows are linearly independent, or turn Aᵀ into ref, and look at the pivot columns, the respective rows of which in A would be the basis of the row space.
To find the column space I need to turn A into ref, and look at the pivot columns, or turn Aᵀ into ref and check which of its nonzero rows are linearly independent.
It is also true that
dim(row space) = dim(col space) = rank(A) = rank(Aᵀ) = nonzero rows in row echelon form of A or Aᵀ
I have no idea that ii even is
I kinda feel lost when I read it
and in general, I am really unsure about double dual spaces
and how to think about them
please help
Does double dual V** only make sense if there is a element from v that it acts on?
like say a in V* and ev in V**
what is ev(a)?
V** are mappings that sends stuff in V* to a field right?
so is ev(a) a field?
ev(a) = a(v)
or is it only in a field if say for v in V ev(a)(v)=a(v)?
ev(a) = a(v) which is an element of the field
right, but where did that v come from
Wait what is ev
its the evaluation map
so ev(a)(v)=a(v)
I still need help with 1(a) ii
Err
I don’t get where u got the evaluation map from
I mean it doesn’t come up in tgis partgicular question
it came from my notes
Oh ok
It’s not relevant for this question
Since u wanna prove it’s an isomorphism
Why not try proving surjectivity first
Ah, I read the notes wrong
anyways
they put in ev(v)(a) instead of ev(a)(v)
and I read that
You know a linear map is determined by its values on a basis
So take som arbitrary F in V^I. Suppose F(i) = v_i for each i, where v_i are arbitrary
The corresponding linear map in L(F_I, V) would be
The map F’ that sends e_i to v_i
Then indeed theta(F’)(i) = F(e_i) = e_i as required
Injectivity can be proven similarly.. lemme know if you have troubles
I'll give it a go
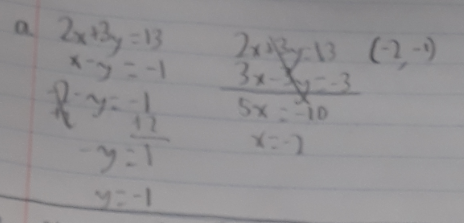
Why is the first set of equations equal to the bottom one in parametric form?
Whete is the y=tz coming from
<@&286206848099549185>
Find an equation or equations of the subspace W of R^3 spanned by: <1,-3,2> and <-2,0,3>. Need some help here getting the equation. I was able to do the previous part where it was an equation of line.
Nvm i got it it was a printing error
You can use this matrix:
Expand the determinant and you get the equation of the plane spanned by the two vectors

Thanks, it worked. But can anyone explain why we solved for the determinant?
because the equation of a plane can be found using the normal of the plane, the normal of the plane is just the cross product of two tangent vectors to the plane, and cross product can be represented using a determinant of a matrix (although I dislike doing cross product that way)
I'm not sure, but my guess is because the determinant is the volume of parallelpiped formed by the three vector. Since the span is a plane and the volume of a plane is 0. Therefore, det = 0??? @quasi vale
Hm, could be. Thanks for replying
If anyone else can provide some insight to why the determinant is 0 when solving for the plane spanned by some vectors? <@&286206848099549185>
you're gonna have to be a little more specific, so like 3 vectors that span a plane in R^3, and we take the determinant and we get 0?
I'll show the question.
Find an equation or equations of the subspace W of R^3 spanned by: <1,-3,2> and <-2,0,3>. Need some help here getting the equation. I was able to do the previous part where it was an equation of line.
Was able to do it by the determinant method. But why is it equal to 0?
tbh i'm not familiar with this technique
No problem.
I think I see what you're doing
if you take the determinant of 3 vectors, it gives you the signed volume of a parallelepiped made from it
so if you put in those two vectors with <x,y,z> and set the determinant equal to 0, you're basically forcing the volume of this parallelpiped to be 0
which would force the vector <x,y,z> to always be smashed down to the plane spanned by those other two vectors
if you have any questions just ask @quasi vale
signed volume?
Ah I get it now
But what did you mean by signed volume?
thanks @quartz compass
signed volume just means it can be negative or positive depending on the orientation
if you flip the order of vectors in your determinant, it flips the sign
have you learned the cross product and right hand rule?
it's really the same thing as that
I know that the sign flips but no I haven't learned about cross product and right hand rule
But thanks bro, at least now I understand what we're doing.
Thanks\
you're welcome
If
hi i need help!
so for part a, I got:
x2 = 1
x4 = 10
x1 + x2 + x3 = 2(x4 + x5)
x2 + x3 + x4 = 2(x5 + x6)
as my set up before making the augmented matrix
but someone on chegg got:
x1 + x2 + x3 = (1/2)(x4 + x5)
x2 + x3 + x4 = (1/2)(x5 + x6)
for the 3rd and 4th equations
so my question is: What does "Any 3 adjacent tasks will take half as long as the next two tasks?", is my interpretation correct, or is the guy on chegg's interpretation correct?
<@&286206848099549185>
use the helpers tag only if no one responds after 15min
oh ok sorry!
so you're using x not t to denote task time
yes
so yea your interpretation of the above statement is off
x1+x2+x3=total time for 1st 3 tasks
"Any 3 adjacent tasks will take half as long as the next two tasks" means doing tasks 1 to 3 should take half the time to do tasks 4+5
yup np 
hey
im trying to solve this, would appreciate if someone can help
1 2 -3 6
2 -1 +4 1
1 -1 1 3
solving this matrices (redused row echleon form)
I can show you what I have done
last row should be -9/5, not -26/5 (unless i did it wrong again)
<@&286206848099549185>
nvm looks right
got the right answer xd
I want to learn how to find the range of a matrix. I read on my math course: "the range of a matrix is the maximal number of vectors (lines or columns) that are linearly independants" what does the course mean by linearly independents?
the range... do you mean the rank?
probably my course is not in english. I mean the rg(A)
le rang
oui c'est "rank" en anglais
l'indépendance linéaire est un concept très basique et très important, si tu sais pas ce que c'est il te faut vraiment lire ton livre d'algèbre linéaire
parce que tout livre en donne la définition
et si c'est un BON livre y aura plein d'exercices sur le sujet
rang en français = rank en anglais?
Je ne suis pas en train de lire un livre. Cette fois ci c'est un vrai cours de math. Je ne suis néanmoins pas fermé à l'idée d'en lire un.
Dans mon cours on lit juste la définition de rang:
"Lerangd'unematriceA,notérg(A)estlenombremaximaldevecteurslignes(oucolonnes)linéairementindép endants" ils n'en disent pas plus :p
je vais comme même vérifier si je n'aurai pas oublié une définition qu'ils auraient mit plus tôt
test de connexion
dans mes cours j'ai :
Cours 1 - Eléments de logique
Cours 2 : Techniques de preuve
Cours 3 : Relations et ordre
Cours 4 - Eléments d'arithmétique
Cours 5 - Résolution des systèmes linéaires
Est-ce qu'il y aurait un passage concernant les matrcies avec des lignes qui sont linéairement indépendantes en dehors du chapitre 5?
@dusky epoch
euhhhhhhhhhhhhhhh
Est-ce que tu me conseillerais de lire un livre d'algèbre linéaire en dehors des cours?
oui? ^^'
où sont les espaces dans ce que t'as copié ptdr
d'ailleurs
euh
ça me semble bizarre
de donner une définition comme ça sans avoir défini l'indép-lin
moi aussi. c'est pour çe que je demande.
je pense que j'ai compris
@dusky epoch linéairement indépendant = qui n'a pas de relation SUR LA LIGNE. C'est peut-être expliqué dans le chapitre Cours 3 : Relations et ordre
nnnnnnnnnnon non non non non pas du tout
ok bien
voilà la définition
un ensemble de vecteurs ${v_1, v_2, \dots, v_n}$ est appelé \textbf{linéairement indépendant} si et seulement si $$\forall (c_1, c_2, \dots, c_n) \in \bR^n, \sum_{k=1}^n c_k v_k = 0 \implies (c_1, c_2, \dots, c_n) = (0, 0, \dots, 0)$$
Ann:
@dusky epoch c'est en effet étrange que l'on ne l'ai pas vu en cours. Je vais voir si ça correspond aux exemples du cours.
@dusky epoch what does the part at the sigma means? ck + vk = 0 or ck*vk = 0 or something else?

of course I know what is a sigma notation
...
your question seemed to imply you didn't know what $\sum_{k=1}^n c_k v_k$ referred to
Ann:
start with k = 1. while k < n then ... do what is at the right
^^' I hope I am right
no you're not
sigma notation specifically denotes SUMMATIONS
$\sum_{k=1}^n c_k v_k$ is short for $c_1v_1 + c_2v_2 + \cdots + c_nv_n$
Ann:
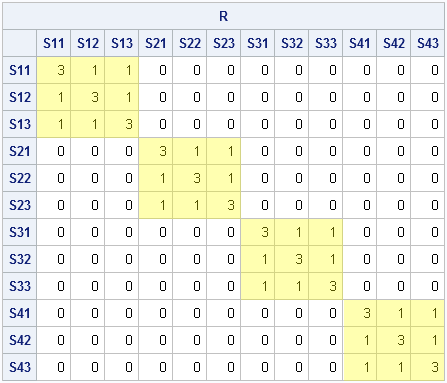
@dusky epoch I think I understand. can you give me a short exercise to see if I am able to determine the rank of a matrix in 2 minutes please?
yes I want it
ok
$\begin{bmatrix}
3 & 1 & 4 & -1 & -5 \\
-9 & 2 & -6 & 5 & -3 \\
-5 & -8 & 9 & -7 & 9 \\
3 & -2 & -3 & 8 & -4 \\
-6 & 2 & 6 & -4 & 3
\end{bmatrix}$
Ann:
there
ogod
@hoary agate what?
nothing, it's just a big matrix
@dusky epoch let's go step b step. line 1: there is no 0 in the line. so I can know that at this steprg(A) is equals or superior to 1. I note that there are the number -1 and -5 but it should not cause trouble because these are relative numbers.
i mean DUH of course its rank is at least 1
the only matrix with rank 0 is the zero matrix
which this matrix isn't
@dusky epoch well I am lazy and I think the answer is the matrik is rank 5 because there is no line where there is a 0 and where there is at least one number different than 0
it just so happens that your answer is correct
but your logic will fall flat on its face with this matrix: $$\begin{bmatrix}
3 & 0 & 4 & -1 & -5 \
-9 & 0 & 0 & 5 & -3 \
0 & 0 & 9 & 0 & 9 \
3 & -2 & -3 & 0 & -4 \
-6 & 0 & 6 & -4 & 3
\end{bmatrix}$$
Ann:
@dusky epoch in the same logic this matrix seems to be rank 1
yeah now you're very, VERY wrong
😦 ok I read the course again
idk if your course will even help
get yourself a linear algebra book
it looks like your course thinks you know linear algebra already
@dusky epoch does this book contain linear algebra https://www.amazon.fr/How-Prove-Structured-Daniel-Velleman/dp/1108439535/ref=pd_sbs_14_t_0/257-5252974-4212646?_encoding=UTF8&pd_rd_i=1108439535&pd_rd_r=fe927edc-59f5-4025-bc5a-b52a314408c2&pd_rd_w=IGMzD&pd_rd_wg=pxaGq&pf_rd_p=9b28d941-c13a-4c2b-b935-36854aa20020&pf_rd_r=04YGZ75PW1GPYZA2CJ1Z&psc=1&refRID=04YGZ75PW1GPYZA2CJ1Z ? do you suggest any book?
no it doesn't
i suggest Linear Algebra Done Wrong
despite the name it is a decent book
@dusky epoch cool the book is free and avaible online
ok
If i have a linear transformation from R^3 -> R^2 and the size of the basis of the kernel of the transformation is equal to 0, can I say that the basis of the image of the transformation is (1,0),(0,1)?
Hello there
can you please make it clear for me how do we see the relation between the transpose of a matrix and the dual space?
what is the intuition behind the transpose ?
If i have a linear transformation from R^3 -> R^2 and the size of the basis of the kernel of the transformation is equal to 0, can I say that the basis of the image of the transformation is (1,0),(0,1)?
you can say anything you want because that cannot happen
yes, in this case the image is the whole R^2 space so yes!
How comes that cannot happen
oh yes you're right
I meant if the kernel of transformation is equal to 1
my bad haha
@dusky epoch are you an engineer

look i'm not gonna suggest a book to an absolute rookie when it involves fucking full-on abstract algebra and unnecessary generality
@dusky epoch do you consider that as "fucking full-on abstract algebra and unnecessary generalityط
؟
LADR does things in a very general light bc it starts off with vector spaces over an abstract field rather than R or C
LADR ??
Linear Algebra Done Right by Axler. I think that's what Ann is referring to.
Thank you so much
@cursive narwhal yes, you’re correct
Linear Algebra Done Right is the book by Axler, and it’s known because Axler is very hesitant to use determinants.
LADW is not an engineer book lol. It's far too proof based for that
Honestly I don't suggest either book to someone new to lin alg
what book do you suggest @half ice
more:
The main point of it is that
if $A$ is invertible, $A^{-1} = \frac{1}{\det (A)} \text{Adj}(A)$
gfauxpas:
though this is hard to use by hand except in the 2x2 case
gfauxpas:
Compile Error! Click the reaction for details. (You may edit your message)
gfauxpas:
gfauxpas:
I know at the very least that diagonal matrices with positive entries on the diagonal satisfy these hypotheses and the inverses of these matrix are also diagonal matrices and the entries on the diagonal are the reciprocal of the inverse
But I'm not sure what to do here. I tried to make an argument equating cofactors of A and A^-1 and arguing that the off-diagonal entries must be equal to their negative but that didn't really work
<@&286206848099549185>
what figure
read the entire problem carefully. the only other vector that's mentioned besides $\vec v$ is $\vec w$.
ari5av:
Book says that eigenvalues of matrix M are 1 and 2, but im getting a third order equation which cant be factorised with those eigenvalues
Is the book wrong? Could anyone check?
1 is definitely an eigenvalue, i can tell you that much
,rccw
i am pretty sure that this is not the charpoly of your matrix
What would it be? I checked 20 times and i cant seem to get where ive gone wrong
Ah nevermind
Found my mistake
Rip
Sometimes i fall so low xd
where can I find the correction for each exercise of the book "linear algebra done wrong"?
<@&286206848099549185> should I continue to ask or should I abandon?
These are normally called errata, try searching for that
Then there isn't a list
No
It's possible that there's not really that many errors in the exercises to be corrected
why are you disappointed
I have a matrix A in GL(n,R) with all nonnegative entries and A-¹ also has all nonnegative entries
How many nonzero entries does A have, what are their locations, and what are the entries of A-¹ in terms of the nonnegative entries of A?
For starters I know that a diagonal matrix with +ve diagonal entries satisfies the hypotheses and
The inverse of a diagonal matrix has the diagonal of reciprocal entries
Other than that i tried to equate cofactor elements of A and A-¹ and figure out which entries are equal to their negatives
But I couldn't get that method to work
https://math.stackexchange.com/questions/3507738/invertible-matrix-with-nonnegative-entries posted on stack exchange

Mathematics Stack Exchange
I have a matrix $A \in \text{GL}(n,\mathbb R)$ with all nonnegative entries such that $A^{-1}$ also has all nonnegative entries.
How many nonzero entries does $A$ have, what are their locations, and
what is echelon form
For all those people who find it more convenient to bother you with their question rather than search it for themselves.
<@&286206848099549185>
@wintry steppe row echelon form is basically this
jus think of it as diagonal 1s
and beneath them are zeros
@wintry steppe don't encourage them
oh sorry
I have to find the ortonormal base of these two vectors
(I think its called ortonormal in English but I’m not sure: its orthogonal and divided by its length)
The answer ends up with these two vectors (just separate them from matrix A)
I’m struggling in understanding how he came up with the second vector
it's not enough to just normalize both vectors
They thought us to use gram Schmidt but I’m getting a different answer
you need to remove the projection of one vector from the other
Ah nvm i found my mistake
ok cool
Actually
I did took away the project from v1
I should have taken it out from v2
Thanks
orthogonal and unitized in English is "orthonormal" with a "th" @lone quail
Kk thanks

What did I do wrong

{kind=link}
{kind=link}
{kind=link}
RokettoJanpu:
errrr my homework is asking to find the "corresponding homogenuous system" of an augmented matrix and I don't really know how to do that
that wasn't discussed in class at all
I think you're supposed to A|0 and find a basis for the null space?
care to elaborate?
Do you mean
Manipulate the equations to get a homogenuous system?
If I had the two rows (it's a 2x4 matrix) of the RREF form together than I would end up with a homogenuous equation
[ 1 1 -5 | 0 ]
like that
Could you post a picture?
I would assume that you replace 4 and 6 with 0's and get a basis for the nullspace?
Make sense?
I suppose so.
I'm polishing this off before class at 6:40 (PST) so I'll ask my teacher what her thoughts are on the problems when i submit it at the beginning of class
Can anyone help me how to answer questions like this in webwork?
what did u try
I tried solving it into a reduced row echelon form
And from there i have x1, x2, x3, and x4 @bleak thistle
I have a unique solution here. I dont understand why is there an s there like i have a parametric solution.
Oh
My mistake @bleak thistle
Im still curious what im going to put as an answer in x4
Is it going to be x4=0+1s?
what is the rank of a matrix?
is that just the dimension of the range of a linear operator?
of its corresponding linear operator, yes