#linear-algebra
2 messages · Page 54 of 1
so if a is a 6x8 matrix, the smallest number of dimensions in the null space is 2, because there's 2 free variables i think
"Null space Rn" doesn't make sense
Oh sorry lol
anyway but if there's only 1 solution does that mean that the null space is 0 dimensional?
like theres 0 free variables
Do you know the rank nullity theorem
i've heard of it but i don't understand it
i tried to read the wiki page but it went way over my head
Khan academy is probably better
The matrix version is
Let A be an mxn matrix of numbers
but anyway so i just want to make sure that i understand, so if the same problem was 'a is a 8x6 matrix, whats the smallest dimension of the null space', would the dimension be 0 because its possible there's only 1 solution?
The rank is the dimension of the span of it's columns
i'm having a hard time visualizing it and a 0 dimension anything doesn't make sense but i don't see any other solution
The 0 dimensional space is
{0}
The set with the 0 vector and nothing else
Its basis is the empty set
i see
@slow scroll If $A, B \in M_3 (\mathbb{R}) ; and ; det A = -7, det B = 4$, what is $det (A^{-1} B)$ to 2 decimal places?
(don't tell me the answer just point me in the right direction)
Is $M_3$ here a 3x3 Matrix?
glee:
so is a 1 dimensional space both a matrix that contains just 1 solution and a solution that has one free variable?
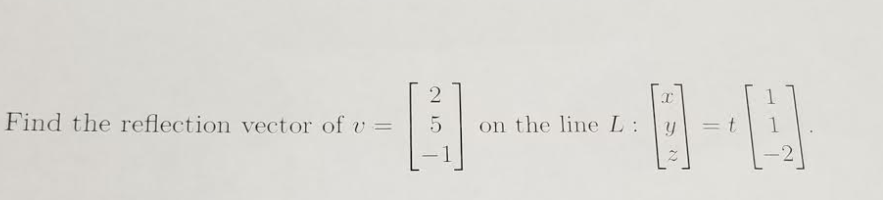
how do I find the basis
for the subspace S
ik that basis is a row with a leading 1 right
you can use the condition in the set to do this really quick
columns
if we have that all vectors in S satisfy x-2y+5z=0, they also satisfy x=2y-5z
na
oh
cause thought it would be a basis of NulA
since youre solving for x
but how would this be done?
@gray dust there’s multiple things that can be A
like infinite possibilities
Right
For a basis of that
WTH IS A
lol
What u mean
yeah i dont know where i got A from
the q makes no mention of anything with the name A
Oh ur not talking to me
what type of basis are we finding?
you can use the condition in the set to do this really quick
if we have that all vectors in S satisfy x-2y+5z=0, they also satisfy x=2y-5z
all vectors in S of the form (x,y,z) satisfy x-2y+5z=0, and they also satisfy x=2y-5z bc algebra
yeah
if you're still stuck the idea is this. x,y,z are not totally free variables. they are constrained to take on a particular set of values due to this eqn
what you can do is rearrange the eqn
and make one of the variables dependent upon the other two
do you see how i got x-2y+5z=0 to x=2y-5z
yeah
from this we can say that y & z are free vars, and whatever values they take on, x must have a value dictated by x=2y-5z @rose grotto
that's kinda what i'm getting at but not quite
and it's not your q
sry im curious
ty
it's the dimension of S, not of R^3.
because you've found a basis for it that consists of two elements
and as such, any basis for S will have 2 elements
which is what it means for dim(S) to be 2
why 2 elements
try using this to make a sub:
from this we can say that y & z are free vars, and whatever values they take on, x must have a value dictated by x=2y-5z @rose grotto
why not 3 elements
what was the original question fruit
there are two elements
one is [2, 1, 0]
the other is [-5, 0, 1]
original question is here: https://cdn.discordapp.com/attachments/540211747613704221/655947307887493131/Screen_Shot_2019-12-15_at_8.40.07_PM.png

@vast torrent
but why can't .I do like 0, 10,5 @dusky epoch
well, [0, 10, 5] isn't in S, for a start.
but you can make another basis for S if you want.
if you really don't like that one
you can make another one
but even then
it'll have
two elements
which is
what it means
for a space
to be of dimension 2
I meant like 10,4
0,10,4
@dusky epoch why can't I do that
as one of my elements
then have 3 elements
because if you add [0, 10, 4] to your set
it'll start being linearly dependent
and therefore, not a basis
it wont work in the subspace?
like it wont fall under the conditions
is that what u mean
do you know what a basis is
tell me what a basis is
I've never heard of one before
I know about vectors and stuff
oh
teach me what a basis is
its like
(I'm pretending)

I gave up acting to do math
you don't know what a basis is.
jeez
i can't say no because that'll make you come up with even more ridiculousness but i can't say yes either because that's not nearly close enough to a coherent and correct answer
;
I have something that's half linear half stat, should I post here to move things along lol
what are you having trouble with mob
I dont understand why they chose those 2 basis as the answer
and not something like 0,10,4
can you re read what i suggested
no?
@gray dust what u said was x=2y-5z
but doesnt 0,10,4
fit that
@half ice ya so why doesn't 0,10,4 work
Well, any possible basis of this space has two vectors
you should learn what a basis is
before figuring out how to find one and what isn't one
(5,0,-1) is in the space, but can't be expressed with the span of your basis
0,10,4 doesn't have a 1 in it
so its not
a basis
^^ there's your problem
you don't know nor understand what a basis even IS, and any further discussion is not going to fix that
you need to go back to your notes, your textbook, your lecture slides, WHATEVER, and learn the actual definition of a basis, including what type of object a basis IS in the first place, since you seem to be missing even that
Definition 4.5. Let V ⊂ Rn
be a linear subspace, a basis of V is a set of vectors v1, v2 · · · , vk ∈
V such that
(i) span{v1, v2 · · · , vk} = V , and
(ii) the vectors v1, v2 · · · , vk ∈ V are linearly independent.
So a basis of V is a set of vectors in V which generate the whole subspace V , but with
the minimal number of vectors necessary
These equations can not be solved since the all zero row in coefficient matrix doesn't have 0 correspond in b right(What i mean is Ax=b and here is the augmented matrix (A|b))
@rose grotto idk if this helps but I'll send.it anyways
since the y and z are just free parameters you can replace them with some s and t
and then you can write <x, y, z> in terms of those two params
no real need to replace y & z, replacing x with 2y-5z is fine enough
and you can find that the 2 in the pic are basis vectors
i mean tru
ive just been taught that way
and it makes it a little clearer to me
@magic slate I found out how to do it, ty tho
ok good
We can make c to REF form by row exchange operation, right ?
you need to make sure a zero row is below all the other rows
and that all the entries under a pivot entry are 0s
Ok i get it now, but these system of equations is not solvable since they are not consistent, right ?
it's not augmented so you can't say they aren't solvable
oh it says its augmented
nv
m
yea
none of them are consistent
Ok thanks a lot !!
np
Can i ask for the books on Linear Algebra which i can use for learning on my own ?
Okay
If I’m trying to prove linear independence of a set of vectors, what exactly am I expecting from my solution when I row reduce my matrix?
So like, if linear dependence is if one of the vectors is a linear combination of the other with at least one of the scalars being nonzero, I know that I either expect a RREF matrix with a unique solution (no free variables) or infinitely many solutions (one free variable
Ones along the main diagonal
If you rref, you are expecting to get the identity matrix
But that gives a unique solution
Don’t I need my scalars to all be zero for linear independence
Amphy Zoro didn't say the matrix was square
Sad
Say it was square though
You end up with Ix=0
Which then says x=0
So the vector of scalars is the zero vector
Is there a better way of proving linear dependence and independence
Other than putting the vectors in a matrix and solving it
Not that I know of. rref is the most conclusive way to tell
If it’s dependent, then you know how many dependent vectors there are as well using the rref
I mainly ask this because I use this for when they ask if a matrix is invertible or not and I always have this in my head that if the columns of the matrix are linearly independent then it’s an invertible matrix
Easiest case that requires little work. If you have more vectors than the dimension of the space you want to span. In other words, you have an mxn matrix where n>m, then surely you have a dependent set of vectors
If M is a full rank square matrix with columns a1, ..., an, and the gram schmidt process gives you the orthonormalized e1,...,en, why is the R matrix what it is? <ei,aj> as entries in the upper triangle?
let's say a 3x3
intermission while I work on the latex in bots
$\begin{bmatrix} \vdots & \vdots & \ a_1 & a_2 & a_3 \ \vdots & \vdots & \vdots \ \end{bmatrix} = \begin{bmatrix} \vdots & \vdots & \vdots \ \hat{u_1 } & \hat{u_2} & \hat{u_3} \ \vdots & \vdots & \vdots \ \end{bmatrix} \begin{bmatrix} \langle \hat{u_1}, a_1 \rangle & \langle \hat{u_1}, a_2 \rangle} & \langle \hat{u_1}, a_3 \rangle \ \cdot & \langle \hat{u_2}, a_2 \rangle} & \langle \hat{u_2}, a_3 \rangle} \ \cdot & \cdot & \langle \hat{u_3}, a_3 \rangle} \end{bmatrix}$
{u1,u2,u3} are the Gram Schmidt orthonormalization of {a1,a2,a3}
$\begin{bmatrix} \vdots & \vdots & \vdots \ a_1 & a_2 & a_3 \ \vdots & \vdots & \vdots \ \end{bmatrix} = \begin{bmatrix} \vdots & \vdots & \vdots \ \hat{u_1 } & \hat{u_2} & \hat{u_3} \ \vdots & \vdots & \vdots \ \end{bmatrix} \begin{bmatrix} \langle \hat{u_1}, a_1 \rangle & \langle \hat{u_1}, a_2 \rangle} & \langle \hat{u_1}, a_3 \rangle \ \cdot & \langle \hat{u_2}, a_2 \rangle & \langle \hat{u_2}, a_3 \rangle \ \cdot & \cdot & \langle \hat{u_3}, a_3 \rangle \end{bmatrix}$
$\begin{bmatrix} \vdots & \vdots & \ a_1 & a_2 & a_3 \ \vdots & \vdots & \vdots \ \end{bmatrix} = \begin{bmatrix} \vdots & \vdots & \vdots \ \hat{u_1 } & \hat{u_2} & \hat{u_3} \ \vdots & \vdots & \vdots \ \end{bmatrix} \begin{bmatrix} \langle \hat{u_1}, a_1 \rangle & \langle \hat{u_1}, a_2 \rangle & \langle \hat{u_1}, a_3 \rangle \ \cdot & \langle \hat{u_2}, a_2 \rangle & \langle \hat{u_2}, a_3 \rangle \ \cdot & \cdot & \langle \hat{u_3}, a_3 \rangle \end{bmatrix}$
gfauxpas:
here {u_1,u_2,u_3} are the Gram Schmidt orthonormalization of {a1,a2,a3} which are assumed lin. ind
here A = QR, and wikipedia says R is unique is we choose diagonal matrices to be positive. It doesn't say what we need to impose to make it unique if R has nonreal entries
gfauxpas:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
Okay i just figured out why R is what it is. My question is still what do we impose to get uniqueness
Wait no i didn't figure it out D:
part of my confusion as to uniqueness is my presumption that the orthonormalization of {a1,a2,a3} is not unique? does GS produce a unique result? D:
<@&286206848099549185>
The GS process requires picking one vector to be simply scaled by its own norm, so I would say that GS produces inherently non-unique orthonormal bases
depending on which vector you pick first
well the order of the columns in A determines the order
where A = QR
but the gram schmidt process presumably isnt the only way to get orthogonalization. and WP says R is unique, not that Q is, on second reading
Cant you just do orthogonal projection?
Hi, quick question. If a matrix has orthonormal columns, and another matrix acts on it, will the resulting matrix have orthonormal columns as well(Aside from that other matrix being the zero matrix), regardless of what the other matrix is? I am having a hard time showing that, if it is true.
hint: if M is orthonormal, is 5M orthonormal?
or -2M or whatever
any non unit scalar
Hi, Yes
However a matrix would apply different numbers to each entry. So if I had a matrix [[1,0],[0,1]] and a matrix [1,1,1,1] acted on it, the output would be [[1,1],[1,1]]
where my original matrix was orthogonal, but my new one is just a matrix of all 1's, which isn't orthogonal
if the determinant isn't +-1, the matrix isn't orthonormal
still worth asking your question about orthogonal matrices
Well this is in the context of primary component analysis
where I am taking a data matrix, A. Performing SVD. I then have a matrix V(Transpose), which are the orthonormal eigenvectors of A_Transpose x A, right?
So that matrix V(Transpose), is an orthogonal matrix, and I will be taking the first k eigenvectors of it
My dataset will then act on that matrix to produce a smaller data matrix. But the question is, does the new data matrix have orthogonal columns
not sure
Why is your basis of vectors such large entries
You can scale them all by 1/5 for example
it's just in regards to the word problem
I'm just having trouble understanding
what exactly it is I'm supposed to do
Oh
a in terms of that basis
So basically what you need to multiply each basis vector by in b) to get the vector a
Anyone have a text or some resource to help make linear algebra less abstract?
Although I do know a few applications where I can use linear algebra in
But for the most part, this semester’s Linear Algebra 1 course has been very abstract
For one in Calaculus I had an easier time connecting theory to application but for linear I can’t do that as often apart from some of the more subtle and easier things
3blue1brown
his video series on the essence of linear algebra
it's intended as a companion for a proper course but he gives some phenomenal intuition on a vast amount of linear algebra topics

YouTube
A geometric understanding of matrices, determinants, eigen-stuffs and more.
Well you know what basis's are right?
isn't it like a combination of vectors
that can create
any other vector in that given space
Is there a generic name for the symetry present in tensors where you can arbitrarily arrange the diagonal
@wintry steppe by uniquely we mean theres only one set of weights that describes each vector in the space
say we took out basis vectors to be the colums of a matrix a
the linear transformation described by A maps each vector x to one and only one unique b
so for any b in the span of our basis vectors, there is only one unique solution x
So i was watching this video about abstract linear spaces
or vector spaces rather
Home page: https://www.3blue1brown.com/
The tools of linear algebra are extremely general, applying not just to the familiar vectors that we picture as arrows in space, but to all sorts of mathematical objects, like functions. This generality is captured with the notion of a...
and he was talking about how derivatives can be represented as matrix transformations
so would the taylor series expansion of e^x be the eigenvector of that derivative matrix?
i don't know a lot about linear algebra
i just wanna know if my intuition is right
If e^x is an eigenfunction then it's an eigenfunction
e^x and the power series of e^x are the same object
well in the video, the coefficients of the polynomial are in a vector
Power series are not polynomials
but in the video the matrix is infinitely large
{1,x,x²,x³,...} does not generate e^x in any linear combination of them
Which time?
9:00
Ill click
Yes this is talking about polynomials
{1,x,x²,x³,...} is a basis for the space of polynomials in x
e^x is not in the span of {1,x,x²,x³,...}
ok
also a second question
What do cross product and dot product mean in a physics perspective?
However in the space of, say, differentiable functions
oh keep going
ok that makes sense
But we don't really know what a basis of "the space of differentiable functions" looks like
So we can't use matrices for that space
which is why i assume its an abstract space
Well we know all about it
But not what its basis looks like
And without knowing a basis, you cant use matrices. But its still a vector space
thats interesting
The axiom of choice implies that every vector space has a basis
But in general we don't know what they look like for infinite dimensional spaces
sorry but what is the axiom of choice
Uh its a proof rule
thats cause you need infinite basis vectors to represent an infinite dimensional vector space right?
To put it mildly
An axiom is
A statement you accept as true without proof, which you use to prove theorems
Like "every statement is true or false"
yeah
Or "if a set exists, so does its power set"
Things like that
So you can use axioms to prove every vector space has a basis
Without telling you what the bases actually are
The axiom of choice is
Given any collection of nonempty sets
There's a function that maps each set to an element inside the set
The function "chooses" an element in each set
so we just assume that's true?
also that would be like "Find the max number" right?
Yeah, mathematicians have proven you can't derive it from the usual set theory axioms
If you had a set of infinitely many pairs of shoes
You could create a map that sends every pair of shoes to the right foot shoe in each one
If you had a set of infinitely many pairs of socks
You would need the a.o.c. to pick a sock from every pair
We assume that picking a sock from each pair is a well-defined process that we are allowed to do
and that would identify each pair?
i thought it would pick one element from the set
oh
nm
No, a choice function would send each set {left sock, right sock} to right sock
right, its a infinite set of sets
Even though there's no difference between the right and left socks
It's that level of abstraction you need to prove vector spaces have bases
Without knowing what the bases are
So wouldn't that assume that each set is ordered in one way or another
like if you didn't know what right and left meant, then you couldn't do the mapping
You probably don't appreciate what a good question that is :)
The choice function is very very closely related to the concept of "putting sets in order"
Of assuming every set can have a nice order assigned to it in a certain way
If you want to learn more about this
The first chapter of Topology by Munkres explains the axiom of choice
thanks a lot
Np
if you dont mind can i ask another question
nice
so what is the physics representation of the dot product and the cross product
im understand the calculations
The problem btw with learning about aoc
but i don't get the intuition behind it
Is that you get confused whenever you see a news article mentioning AOC
lolol nice
ok
Though graphically
The dot product is related to the angle between vectors
a.b=|a||b| cos(theta)
yeah
a good physics understanding of the cross product comes from torque
like when you are rotating a wheel
yeah thats what i was wondering
the torque is the cross product of the radius and the force
i understand that the torque is perpendicular
but how do you know that the magnitude is the area between the radius vector and the force vector
The direction of axb is perpendicular to both a and b and its direction is given by the the right hand rule
The magnitude of axb is the area of the parallelogram with sides a and b
yeah
$\tau=\frac{dL}{dt}$
PorosInMyAshe:
and $\frac{dL}{dt}=r\times \frac{dp}{dt}+\frac{dr}{dt}\times p$
PorosInMyAshe:
where p is the momentum
the 2nd term is obviously 0
since dr/dt = v, and v x (mv)
is 0
they're parallel vectors
dp/dt is F
and that's how you arrive at the cross product
L = r x p btw
that's why the derivative is that
so when you use the chain rule here
Product rule
kind of, yes
The product rule looks the same
but the order has to be the same
as in the r term is also in front
since it's r x p
not p x r
Dot product product rule also looks the same
not commutative here
anyone online
No
I was able to finish Lin Alg with an A (85) thanks for all your help @gray dust @half ice @dusky epoch @vast torrent
congrats
thank you
Yay! Glad.
:)
Why is the magnitude of the vector product the area of the paralellogram spanned by the 2 vectors?
Consider the area of the triangle formed by the 2 vectors, $\overrightarrow{a}$ & $\overrightarrow{b}$
Abhijeet Vats:
So, the initial points of the two vectors have been joined up and we've connected their terminal points using a straight line.
Now, suppose that the two vectors were directed such that there was an angle of $\theta$ between them.
Abhijeet Vats:
Now, this is a geometric theorem but we can say that the Area of the Triangle, given by A, is:
$A = \frac{1}{2} \cdot |\overrightarrow{a}||\overrightarrow{b}|\sin(\theta)$
Abhijeet Vats:
Essentially, we're multiplying the lengths of the two sides of the triangle and the sine of the angle between them. That's something from basic geometry and we've just applied the idea here
Now, of course, you know that the two vectors will form a parallelogram if i draw another 2 vectors that are just parallel translations of the original 2. That second triangle, then, has to be the same as our original triangle. Hence, it's area is also A, given by the formula above. Thus, you have the area of the parallelogram, B, given as follows:
$B = 2A = |\overrightarrow{a}||\overrightarrow{b}|\sin(\theta)$
That's nothing but the magnitude of the cross product of the two vectors.
Abhijeet Vats:
If you can't visualize what i'm saying above, try to draw it out. It'll make more sense if you can use my explanation above as a guide but derive most of it yourself. That will, undoubtedly, make it easier to remember.
@cursive narwhal Thank you, will read it soon and see if I understand. Appreciate the help
@cursive narwhal Not sure if you can simplify it further but I followed to the part where the magnitude of a multiplied by magnitude of b and the angle sin between them is the area of the paralellogram but why is this the same as axb?
I mean magnitude of axb
Eh there's a way to derive it from the definition of a cross product
Like, the cross product of two vectors is defined by the cross products of the unit basis vectors. We've defined the cross products of any two unit vectors to produce a particular vector using the right-hand rule. I'm pretty sure you can use that to derive the magnitude of the cross product
Alright, thank you once again.
Hey, I have question, that I have the answer to, I want others to solve it as well
Question:
Take any matrix of any order, find an algorithm to extract any of the elements in the matrix. Allowed operations are Multiplication by other matrices, addition with other matrices and determinant
the matrices used in the algorithm must only depend on the order of the original matrix and the position of the element you're trying to extract
what are the elements of the matrix
real numbers
Then it's impossible
why?
Because non-computable numbers exist
what do you mean?
just google non-computable number
ok
So?
as I saw, non computable number are those for whom we can't develop an algorithm
for a number n, we can't figure out n decimal places
@sonic osprey ^
right?
@sonic osprey ??
But they are still real numbers, and follow properties of real number...
If you wish to take non computable number in the matrix, let's say, 'Mu' leave it as Mu in the matrix
who told you to find exact value of Mu
Is that not what "extracting any of the elements in the matrix" means
Ok ok
look
if the 1st row of matrix is [1, Mu, 22]
and you wanted to extract Mu
then after the algorithm, you'll get Mu
no matrix
that's my question
"as I saw, non computable number are those for whom we can't develop an algorithm"
Leave it a 'Mu'
That makes no sense
This assumes you had the value of Mu in the first place
Ok
Yes
But if you computed the first few digits and got
3.141592
You couldn't tell if it was pi
or just 355/113
And even if you kept computing more digits
You still wouldn't be able to tell if it was acutally pi
or some fraction that's close to pi
Yes
Or even some other irrational number that's close to pi
sure?
that's what i'm saying
Nowhere you multiplied every decimal place with 1
but you got pi
right?
What
Yep, but your abstract mind can
and, algorithms are not only for computers
but also for your mind
"No actual computer can hold real value numbers" how is that true
tfw I can't store the real number 0 in my computer 
CAS can't store irrational numbers ? Like "the root of x²-2"?
I mean, it's really not storing them, calculations with them are just algebraic manipulation
Algorithms that can't even theoretically be implemented aren't algorithms? How would that even work
And you're right, by store I mean actually store the digits of
unless its a rational number with a denominator a power of 2
Really? It can't store 1/8 in binary?
Guys I wasn't talking about computer algorithm
8 would be 0.001 BIN
I mean, usually when people say algorithm, they mean turing computable algorithm but uh
is your matrix square
@wind hound there are no mind algorithms that aren't for computers, how would it even be an algorithm
I think I misunderstood your question earlier
His idea is that he has a matrix with all the values already in it
Yes
But you just don't know what the values in the matrix are
There you go
Like the data are encrypted?
It's okk
so is it square
No lol
Then what
as far as I know Doesn't matter
but you know the dimension of the matrix right
That's why I said it only depends n certain things
Which you can do by multiplying on the right by an NxN matrix with only one 1 and the rest 0's
Then multiplying by the vector (1,0,0..,0) on the right will give you the first element in that row
okay yea
so you want to multiply it on the left by an MxM matrix
You can do this in either order, it's just transposed
Uh I mean
after you do those two steps, you have a Mx1 or maybe its Nx1 vector with all zeros except one place
Where it's the value you want
so you should be able to multiply it by a 1xM or 1xN vector with all zeroes and one 1
I mean sure
You're left with a 1x1 matrix with the entry you want
Take the determinant I guess
Could someone explain why it is the case that:
If Ax=b is a system of linear equations, where A is an mxn matrix whose rows add up to 0. Then it is necessary that the sum of all the components of b to add up to 0 for there to be a solution
adding all the m 1xn rows
then what about columns?
what do u mean?
no
rowXcolumn
No, its still not clear
ok, so you want to add up the elements with all the elements downward
then you'll get 0?
yes
Oh
(0 0 ... 0) n times
then It's really simple
so
what you wanna do is take any number x from real number
then imagine then multiplied with the matrix
it gets distributed all over the matrix
now that matrix is equal to the other matrix 'B'
Right?
how do you get a column vector if you multiply x(real number) with a mxn matrix?
ohhh
okk
I thought x is a real number
no
Okk
Yeah, I got the answer now
So, try to imagine the matrix multiplication that's going on
I'll go step by step
let's try this with 2x2 matrix and 2x1 matrix and B is 2x1
got it?
k
So,
first element of the x is x1
and when you multiply, multiply the row of the first matrix with the column of the next
so, first element of A which is at row=1 column=1
gets multiplied by x's first element
right?
ok, standard matrix multiplication
Yep
now
think about the second multiplication that you'll do, 2nd row with the x
in that too you'll multiply the first element with a1
right?
k
so, when you get the final matrix/vector
and you add downwards
then you'll add the elements multiplied by a1
and then you take a1 common then you'll get 0
right?
hang on
if I see the matrix multiplication as b = x1*A1+x2*A2+...+xn*An
where Aj , j=1,...,n are the columns of the matrix
think of it this way, first element of x is always multiplied with the elements of A in the first column
Yep
and I add the columns together
Then when you add the rows then you can take the x elements as common
Yep
right
ok, I think I get it
So, morale of the story: there is a relationship between matrix systems and simultaneous (linear) equations.
np
what do u mean Boni?
I only summarised what ColorCookie had explained to you.
Your learnt at some point how to solve simultaneous equations:
2x + 3y = 3
5x + 2y = 10
Every such system of simultaneous equations can be written in terms of the Ax=b.
As they said, try writing them out, and you should see the relationship.
@frank blade Yep
I'm aware of this, I was just looking in the wrong spot for making sense of the statement
It happens
How does one express this as even or odd
is it to do with the number of disjoint cycles
or the size of them
are you asked to find whether this permutation is even or odd
ie determine its parity
you don't have to do any cycle stuff to do that
@short gorge
The 2 disjoint cycles I've found for it are (1,5,6)(2,8)
on this basis is it odd, because the product of the 2 lengths is even, therefore odd
yes it is odd but not for that reason
Right. Is it to do with it being an even number of disjoint cycles?
Hi, I'd like to write the quadratic equation in canonical form. what is the symmetric matrix for this expression? How do I write sqrt(3) as a sum of 2 non-zero numbers?
$\sqrt{3}=\frac{\sqrt{3}}2+\frac{\sqrt{3}}2$
RokettoJanpu:
hello, I have a task in matrix to prove or disprove that adj(A+B) = adj(A)+adj(B)
I am not sure how to start with this, am I suppose to write random numbers or use parameters?
maybe intro to linear algebra by strang?
or just search up practice problems for each lesson you do
intro to linear algebra is probably what is best for you then
so I haven't had a class on functional analysis yet, so be kind
but is the dimension of an infinite dimensional vector space the cardinality of its smallest basis?
like for example functions on the reals can be represented by a countably infinite basis (infinite polynomials) or as an uncountably infinite basis (Fourier transforms)
so could we say the dimension of the set of functions on the reals is aleph naught?
functions on the reals cannot be represented by Fourier transforms, only functions that are square integrable can be represented by fourier
also you cannot represent all functions over the reals with power series
ok, pretend I said continuous and infinitely differentiable functions on the reals
still no
e^-(1/x^2) is the stereotypical function
with a point inserted at x=0
infinitely differentiable, continuous, not analytic
ok, for the sake of answering my original question (which was not about the semantics of representing functions with series/fourier transforms) what about the set of functions that can be represented by both fourier transforms and power series
assuming it's closed on multiplication and addition and whatnot
sure, you can say the dimension of all function that can be represented by a power series is something
apparently the dimension of all functions from R->R is 2^2^aleph naught
kinda big
for polynomials it's 2^aleph naught
why would it be bigger than aleph naught?
couldn't all polynomials be represented with a power series?
@royal vigil yes they can, and?
If it can be represented by power series, then it can be represented as a linear combination of other polynomials
Isn't {1, x, x^2, x^3,...} a basis for the set of polynomials?
A set whose cardinality is aleph naught?
Yeah
I mean @steady fiber said it wasn't so I was confused
Oh indeed i see he said that

Mathematics Stack Exchange
I'm trying to find the cardinality of the set of all polynomials with coefficients in ℝ.
What's wrong with the following proof:
Let $f$ be a function:
$$f: \mathbb R[x] \to P(\mathbb R)$$
$$f(a_{...
I just went on math stack exchange ngl
and it says cardinality of all polynomials with real coefficients is that
oh ya you're right
it is indeed aleph naught
for dimension
I'm kinda stupid at times
nah
line (x-1)/2=2y=z+1
how do i convert that to smt i can use
i want it like ax+by+cz+d=0 or smt
if i set t=(x-1)/2=2y=z+1 i believe this is called parameterize in english? i can then set up a system of quations x,y,z and express them in (t) and find its coefficients
ill try that
If I have a linear transformation S:R3->R3, would I just put all this into an augmented matrix with the untransformed vectors to the left and then calculate RREF for it to get the transformation matrix for S?

{kind=link}
{kind=link}
How is this not the rotation matrix about y axis?
(0,0,1) lands behind the zy plane from the looks of it so the x coordinate must be negative?
oh wait anti clockwise
MY BAD BYEEE
Hello we had a 2x2 matrix in the exam, and we had to diagonalize it, however the 2x2 matrix has only one lambda, not two
Can it be diagonalized?
Yes and no, depends on what you got as a basis for the null space, so for it to be diagonalized you need a 2-dimensional null-space
f( [a,b], [c,d] ) = [ a*c , b*d]
what's the name for this operation?
what are those square brackets supposed to mean
@dusky epoch two vectors
oh like column vectors
,,,,, idk i'd call this "coordinate-wise multiplication" if i had to
why do you need a name for it
@dusky epoch i wanted to write it down ha - "element wise product" was about all i had
yes that
hey guys, looking for more help please with these practice exams
I dont understand the student posted solution for this one
Let A, B, C be nxn invertible real matrices
consider the equation
$\lambda^3 Ax + \lambda Bx = Cx$
gfauxpas:
Show: if n is odd, there is at least one real number lambda and real non-zero vector x such that this equation holds
well before I go to the answer key
how would I approach such a thing
I notice that this equation is the same as
$\left({\lambda^3A + \lambda B - C}\right)x = 0$
gfauxpas:
it does show that $\lambda^3A + \lambda B - C$ is non-invertible
PorosInMyAshe:
if you can show that you can find a lambda st that becomes non-invertible
hmm
then you've solved the problem
$\ell(\lambda) = \det(\lambda^3A+\lambda B-C)$
gfauxpas:
should I do this and find roots?
well I dont know how to find roots
I do know cubics have a real root
but this has 3 different matrices
so I can't use anjy theorems I know about char. polynomials
cayley-hamilton or whatever
$\det(\lambda^3A + \lambda B - C)=0$ is what we have to prove for us to solve the problem
PorosInMyAshe:
and that determinant has a characteristic equation with odd degree
which means it has at least one real root
but I dont know how to have a characteristic equation of 3 matrices
you just sum the terms up
I only know for a polynomial in one matrix
and find the determinant of it
ooh
it's not really a characteristic equation
it's just a polynomial
that has odd degree
and you know that an odd degree polynomial
has at least one real root
and it's a polynomial that's degree odd degree... how do we know it's odd degree just because n is odd
yes
yes we have to prove it has odd degree
okay, so if we do the laplace expansion, along any row of our summed matrix, we will get a $A_{ij}\lambda^3+B_{ij}\lambda+C_{ij}$ multiplied by a cofactor
PorosInMyAshe:
and that's a degree 3 polynomial
and if we keep doing this, the final polynomial will have degree 3n
which is odd when n is odd
wait, that's for each cofactor coefficient, that formula?
you can prove it by induction, for a 1x1 matrix, the polynomial would be degree 3, for an nxn matrix, the degree of the polynomial would be 3+degree of the (n-1)x(n-1) minor
ya, the laplace expansion formula
it's not very rigorous here, but do you get what I mean
well induction will make it rigorous
yes
what's part 2
for n =2 , find a counterexample
where there is no real lambda and x!=0 such that the equation holds
I don't want to jus tguess randomly
I want to have an approach rather than just hope I pick the right ones
I see that the answer key picks one of the matrices to be I
A = Identity, C = zero matrix
oh true
then I'll make C something else
but ya, starting with identity is probably a good idea
$\ell(\lambda) = \det(\lambda^3 I + \lambda B - C)$
gfauxpas:
I only need one counterxample
and manipulate the coefficients however
but I don't want to just shoot in the dark randomly until I find one
to make a function that's always positive
or whatever
it's not a shoot in the dark
it's getting the polynomial and then using the properties of polynomials to make it always positive
or always negative
okay so
uh
if you want to make it easier
just to make computation easier
your polynomial is just $\left(a_{1}x^{3}+b_{1}x+c_{1}\right)\left(a_{2}x^{3}+b_{2}x+c_{2}\right)$ then
PorosInMyAshe:
x is lambda
$\begin{bmatrix} \lambda^3 + \lambda a - b & 0 \ 0 & \lambda^3 + \lambda c - d \end{bmatrix}$
gfauxpas:
oh true, we made A = I
,w (lambda^2 + lambda a - b)(lambda^3 + lambda c -d) expand
,w distribute (lambda^3 + lambda a - b)(lambda^3 + lambda c -d)
gross
lol
,w distribute (lambda^3 - lambda c - b)(lambda^3 + lambda c -d)
becomes that
set b = -d
,w distribute (lambda^3 - lambda c +d)(lambda^3 + lambda c -d)
okay this is quadratic in lambda^2
you can probably put that in desmos
yeah but I wont have a compuiter on the exam
I will have enough time to multiply polynomials
so I'm cheating now
but I wont have desmos
I dont want to lose invertibility but I dont think I will
,w distribute (lambda^3 - lambda 1 - b)(lambda^3 + lambda c -1)
ah of course, as long as I dont turn them into 0
set b = -a
b=-1 I mean
,w distribute (lambda^3 - lambda 1 +1)(lambda^3 + lambda c -1)
getting better
https://cdn.discordapp.com/attachments/540211747613704221/657388334544453652/wolf.png over here why not just test out a c and d
{kind=link}

how'd you get that
,w distribute (lambda^3 - lambda c +d)(lambda^3 + lambda c -d)
ah, so I did
but I dont want lambda=0 to ruin things
oh nm
-d^2 is not in lambda
hmm
the answer key does use 3 diagonal matrices
but doesn't tell you how to come up with them
oh, well
he does do
I personally would use another approach
one matrix is the transpose of the other
make A and B both I
to simplify things
and allow C to have any entry non-0
then you get $\left(x^{3}-x+a\right)\left(x^{3}-x+b\right)-cd$
PorosInMyAshe:
and all you have to do is make cd a very large negative number
and you're done
if you shift the function up enough, it just cannot have a root
can you go back and slow down a little bit please
sure
my ritalin wore off by now
sure, and let's make C diagonal too
then the determinant is $\left(x^{3}-x+a\right)\left(x^{3}-x+b\right)-cd$
PorosInMyAshe:
and if you set a=b=0
to assume 4 degres of freedom is enough to have a coutnerexample?
that's our guess?
trying to build intuition here for how to find counteramples onan exam
by setting a,b to 0, you get $\left(x^{3}-x\right)\left(x^{3}-x\right)-cd$
PorosInMyAshe:
we have in theory 12 degrees of freedom to make a counterexmaple
which you can simplify to $x^{2}\left(x^{2}-1\right)^{2}-cd$
PorosInMyAshe:
we're narrowing it down to 4?
sure
and then just make cd massive
like c=-1000, d = 100000
the function is shifted too far up to have a root
cool. I got it, I'm just trying to learn intuition here to create counterxxamples on my exam
and ya, there you go
if I have 12 degrees of freedom
and im trying to make a counterexample
I should make an educated guess that 4 degrees of freedom is enough?
make the complicated parts I
like in this case the lambda^3
so we made A = I
i went further and made B = I too
so coefficients of lambda are already set
and then keep a reasonable amount of degrees of freedom from the rest
so instead of 2 for C
it could be that any assumption we make is going to ruin our chance of finding a counterexample, but if the space of non-solutions is big enough our chances are pretty good, right?