#linear-algebra
2 messages · Page 48 of 1
Thanks! I'll take a look over it.
And your rank thing too.
You say the answer is two?
yeah
D is a diagonal matrix whose entries consist of A's eigenvals. P is an invertible matrix whose columns consist of each eigenval's corresponding eigenvec
Erm, does order matter with D? Is it, in this example, ((-2, 0, 0), (0, 1, 0), (0, 0, 3))?
Sorry - I don't feel like invoking the TeX bot.
no
it just affect the way
you construct P matrix
I mean, each permutation of diagonal of D
each P matrix
So... it doesn't matter?
the order of the eigenvals must be consistent with the order of eigenvecs
I'll be honest, I'll have to take a look at diagonalization first. But thanks for the help!
for example if you had eigenvals $\lambda_1,\lambda_2$ with respective eigenvecs $\xi_1,\xi_2$\\if you construct $D=$ diag$(\lambda_1,\lambda_2)$, then P's first column must be $\xi_1$ then $\xi_2$ is next
Er, just to clarify some terminology, for some matrix A and vector v, if Av=cv, then c is the eigenvalue, and v is the eigenvector, yes?
Some reason, the teacher just started using terms without really defining them... it's fun.
But yeah, I think I might get what you mean.
Fair enough.
yeah c is the eigenval and v is the eigenvec @edgy ridge
really doesn't matter what names you give em
i usually call eigenvals lambda and eigenvecs xi
Anyways, I threw some numbers into a calculator regarding trace... Let's say a diagonal matrix with 1, 5, and 9 (3x3, 1-9). Its trace was 15. I then tried throwing in its square, so 1, 25, and 81... its trace was 107. However, squaring the matrix should result in 261 as its trace...?
RokettoJanpu:
Recall that I was given only the eigenvalues, and was told to find the trace of A^2
The values were -2, 1, 3.
3x3 matrix.
,calc 1+25+81
Result:
107
tr(A)=sum of A's elements along main diagonal
Yeah.
I guess the problem in this case is I don't know the matrix - only its eigenvalues.
So I know the trace of A, but what is A^2?
Erm, the trace IS the sum of the eigenvalues, right?
why 261
I just used a calculator... hold on a sec.
Anyways, Nguyen mentioned that if x is a eigenvalue of A, then x^2 is for A^2...
And since the trace is the sum of the diagonal, and is also the sum of its eigenvalues...
Can I say that if A has eigenvalues -2, 1, 3, then trace(A^2)=4+1+9=14?
Yeah, since it's diagonalizable(not sure if it's true in general)
Trace is sum of eigenvalues
And if A=$$PDP^{-1}$$ Then $$A^2 = PD^2P^{-1}$$
AoiKunie:
So the squares of the eigenvalues to A are eigenvalues for $$A^2$$
AoiKunie:
bad tex
A and B look almost similar
and M_2 is really whackable
only 2 cases essentially, invertible and rank 1
if A, B invertible we are done, because we have A=B
if A invertible we get AB=B^2...hmm
A^2 = tr(A)
hm...
A^2B = tr(A).AB
AB^2 = (A^2.B^2)/tr(A)
and we have
tr(A).AB = (A^2.B^2)/tr(A)
<=> tr(A)^2.AB = A^2.B^2
hm.../
Hello everyone. Would someone have any hint about the following:
https://math.stackexchange.com/questions/3445326/if-any-order-preserving-permutation-submatrix-of-a-otimes-b-belongs-to-a-b

Mathematics Stack Exchange
Edited after the comment below: let $A$ and $B$ be two permutation matrices of size $n$. If any order preserving combination of $n$ rows and $n$ columns of $A\otimes B$ that is a permutation matrix...
<@&286206848099549185> how do we prove that an empty set is contained in a set that we will call X
yeah
i dont think i did
you need to wait 15 minutes after asking a question to ping helpers
maybe that rule has been changed or something because i couldnt recall it and i just looked again i dont see it am i blind?
@analog wasp
What's your question? How do we tell if the empty set is a subset of X? The empty set is a subset of every set.
apparently we need to demonstrate that
and i dont see a possible way to do so, maybe i miss understood what the teacher meant by that
if you understand any french then here you go, if not, the second question in Exercise 1 says : Demonstrate that Ø is included in X
why are the eigenvalues associated to the symmetry of a line r passing through the origin always 1 or -1?
specifically f(r)=r (eigenvalue 1) and f(r2)=-r2
where r2 is the line perpendicular to r
what i dont understand is where f(r)=r and the other part come from
is it apporiate to say that a given linear transformation is not surjective because its rank does not equal m (the number of rows of the map)
what's m
the number of rows
such that if T(x) = A(x) then m is the number of rows in the matrix A
there are no "rows" to talk about when you have just a linear map and not a matrix
the rank of T is the dimension of its image
the image of T has a structure of vector space, it's a subspace of the output vector space
if the output space happens to be finite dimensional, then you do have T surjective iff dim Im T = the dimension of the output space

looks like you only need to pick out an eigenvector corresponding to lambda_1 = 3
@hardy blaze ^
no prob man
@sleek briar let's ask here. HP asked in the question chat and I dont know the answer
Questions gives two lines in space given by constant(x-x1)=constant(x-x2)=constant(x-x3) and similarly for the other line
question is to find the distance between the two lines
https://media.discordapp.net/attachments/490557019623915520/648235470211252245/IMG_20191125_002434742.jpg?width=298&height=398 his source gives this formula and I don't know its derivation

Well they are testing on whether you understand linear independence
in which case what you have to do is consider the linear dependence relation and create a system of equations to figure out w
similar matrices have the same eigenvalues with the same algebraic multiplicity (and also have the same determinant)
so just find those
and compare
Can anyone please help me with this question? Given a 3x3 matrix A with eigenvalues -2, 1, 3, find the rank(A+2I), where I is the identity matrix. A kind person was willing to help the other night, but I'm a bit lost still.
A has 3 distinct eigenvalues, so A is diagonalizable
A = PDP^(-1)
of course, I = PIP^(-1)
so
A+2I = PDP^(-1) + 2PIP^(-1) = P(D+2I)P^(-1)
rank(A+2I) = rank(D+2I)
D is diag(-2, 1, 3)
so
rank(D+2I) = rank(diag(0, 1, 3)) = 2
But where did rank(A+2I) = rank(D+2I) come from?
when you multiply a invertible matrix
it doesn't change rank
rank(P(D+2I)P^(-1)) = rank(D+2I)
This applies when multiplying invertible matrices with that? Its inverse, or any other matrix?
just invertible matrix
I mean
rank(A.B) = rank(A)
if B is invertible
rank(A.B^(-1)) = rank(A) too
because B is invertible then B^(-1) is also invertible
so rank(PDP^(-1) = rank(DP^(-1)) = rank(D)
Kinda confusing, but I'll take your word for it. 🙂
yeah
rank(A.I^(-1)) = rank(A)
right?
so when you're dealing with rank
just imagine an invertible matrix is an identity
Alright. I guess, so since in the case PDP^-1, it is obvious that P is invertible by the existence of P^-1 in the equation, it will not affect the rank, therefore rank PDP^-1 == rank D?
Yep! Thanks. Now, next part is
D is diag(-2, 1, 3)
so
rank(D+2I) = rank(diag(0, 1, 3)) = 2
Is there a typo there? Is it not supposed to be
rank(D+2I)=rank(diag(0, 3, 5))=2?
D is diag(-2, 1, 3)
I is diag(1, 1, 1) then 2I is diag(2, 2, 2)
then
D + 2I = diag(-2, 1, 3) + diag(2, 2, 2) = diag(0, 1, 3)
obviously rank(diag(0, 1, 3)) = 2
just write it out
Well, if we add up the diagonals, then for top left, -2+2=0, for middle, 1+2=3, for bottom right, 3+2=5, no?
ah yes
Then should it not be (0,3,5)? Am I missing something that makes it (0,1,3)?
Ah alright. Thanks. It does not affect the rank, but it was making me puzzled.
Hello, I've been asked to prove that if a subspace is T-Invariant, then the following is true:
I'm unsure where to go from T(S) = S to this
forget it, id missed an important condition
Can i ask very simple question related to Laplace transform?
I have the answer but I think it's wrong
don't ask to ask
Transform u(t) to ..
Is 1/s
But teacher wrote number*1/s
"Level unit signal" (using google translate).
Sorry if it's not clear.. teacher isn't clear either..
@dusky epoch can you help?

???😟
i really don't want to deal with this rn
Then why bother writing "don't ask to ask"?
someone else might have come and helped you
It's not a long answer.
But I understand your frustration
I doubt someone will help
I'm stuck on it and ask my classmates
@wintry steppe if you're not sure which is correct, why not just evaluate the integral L{u}?
Or L{u(t-c)}
For more generality
Well what's the definition of laplace transform, do you know?
Let's move to another chat, this isn't lin alg
if 2 vectors row reduce to the identity matrix does that mean they span all of R^2?
u = <6,3>, v = <-30, -12>
if you cram those vectors into a matrix and can row reduce it to I, then yes
thanks
If a set of vectors in R^4 are linearly independant. Are these vectors always a basis?
How do i determine if the vectors make a basis in R^4, otherwise?
Or in R^n in general.
you need a set of n LI vectors from R^n to form a basis for R^n. Edit: thanks Ann
Oh, it all makes sense now when looking at the question again. Thanks 😀
the definition would require linearly independent and spanning
it's a theorem that in finite dimensions it's sufficient to have n linearly independent or n spanning vectors
I'm tasked to the find the basis of the null space of the linear transformation (T_{A}:,\mathbb{R}^{3}\to\mathbb{R}^{3},, \mathbf{x}\mapsto A\mathbf{x}) where the matrix A is [\begin{bmatrix}
1 & 0 & 1\
0 & 2 & -1\
0 & 1 & -2
\end{bmatrix}]. Matrix A has full rank so the dimension of the null space is 0. Is the empty set a basis for a dimensionless null space? I'm not sure how to answer this. Thank you.
Noether:
Or is the answer, it doesn't have a basis?
empty basis
Anyone know about linear congruency
Dunno if this is the right place to ask about it
Solve this congruence relation to find the smallest possible value of x: 5x ≡ 1 (mod 21)
Tried running it into a calculator but it just made no sense to me
What does it mean for something to be a vector space?
Closed under addition and scalar multiplication, right?
Are you sure?
Uhh
A real vector space satisfies x,y\in L implies x+y\in L
And if x\in L then cx\in L if c\in R
Are you reading this somewhere
What do I have to check?
It depends what the problem is asking for
Are you trying to check that they're vector spaces? Or subspaces of other vector spaces
That they're vector spaces
What does it mean to increase the determinant
@grave halo
For the first one, you know that R⁴ is a vector space. So, you can prove A is also a vector space by proving it is a subspace
What does it mean to increase the determinant
@half ice Thank you. I did just that 🙂
@wary shoal I don't know if you mean increase it as in you want it to be 16721692 bigger, ie 906340587+16721692 or 16721692*906340587 but if that's what you want you can always use the the property of determinants: (\text{det}(cA)=c^{n}\text{det}(A)) somehow?
Noether:
Well find the c^n that satisfies that! 🙂
n is the dimension of the matrix
Uhh
Those are a bit trickier rules
I'm not sure how to do it algebraically but you could brute force it numerically.
Have you tried randomizing it using a computer
^ what I meant by numerically
Did you try every single combination?
You sure there's a solution?
What kind of algorithm did you use in order to not brute force it?
So leave your pc running for an hour and go cook dinner
Can you somehow express the determinant algebraically with your required conditions?
Why are you using doubles for integers
We wish haha
Yeah thank God
The permutation definition of the determinant might help here
At least, it may reduce down your search space
I mean, with a 9x9 matrix
It's going to be hard to determine what's invertible and what's not
Without actually calculating the determinant
Why are you using doubles for integers
Ayy
I wonder if a greedy algorithm will work
Put all the 9s in one row and expand on that row
Worth a try
Well alternating i mean
9 1 9 1 9 1 9 1 9
In the first row
Try that
And the second row will be like
x 8 2 8 2 8 2 8 x
Something like that, still thinking it through
x x 7 3 7 3 7 x x
x x x 6 5 6 x x x
Worth a try
Do you disagree that i = e^(π/2)?
i have no idea what that means
:p
idk where it came from
or why it was introduced
wdym gary
Useful here is euler's formula:
e^(it) = cos(t) + isin(t)
Put in π/2, you get i = e^(iπ/2)
oh looks similar to de'moivres theorem
It's an extension of demov
oh
Is very useful
i did ctrl+f in my textbook for euler
didnt show anything 😠
but ill write it down
Wtf kind of book are you using
In fact your book presents re^(iθ) as polar form, your book must have introduced euler already
There's no understating how important this is, complex numbers exist because of it
e^(it) = cos(t) + isin(t)
So commit that one to memory lol
Post the book so we can roast it or prove your ctrl.f wrong, either way
ok one second
It's hard to believe this could be omitted
So yeah, let t = π/2, you've got e^(iπ/2) = i
Needs a password rip
oh
In fact, π/2 + 2πk for any k works as the exponent
You may see they have that in the proof
They have θ = π/2 + 2πl
oh ok
Page337 and Euler isn't mentioned
oh lolol
i thought he was just the guy who said 'i dont have enough paper so i cant write the proof'
Well, lin alg in its modern form is a 1900's thing
ah
No that was Fermat
oh ya
He also had some good stuff. Two very important theorems are named after him
oh damn
Well, maybe the last theorem isn't crazy important. Still interesting though
Fermat's little theorem is useful for modular arith
ANYWAY Still need help with it?
uh im watching a video
so i dont annoy u
if i still have q's ill ask
thank you !
Sure sure, good luck!
What does it mean when a matrix is close to another? In this case, it's question B.
if you make a small approximation at one point, you get exactly the same matrix that you are supposed to be "close" to
you just approximate an extremely small number to be 0
Erm, I don't understand? I ran it through a calculator, and this happened...
Someond know how to do laplace transform with sin?
Oof that's nuts lol
So, what’s supposed to happen? Will the resulting matrix equal the one depicted in b.?
you did no approximations like I said you should do
so you get that thing
which is also pretty close to what it needs to be
just looks disgusting
@wintry steppe don't think this is the channel you want for laplace transforms, probably #real-complex-analysis or #multivariable-calculus
I thought that was the definition of orth. proj. What's the defn you have for ortho. proj?
If it's a projection and it equals it's own tranpose
Ah okay
That's actually probably the definition
I just took the formula for granted
So
Call the matrix A(A'A)-¹A' =P
First prove P = P²
Then prove P = P'
Ah that's not enough, is it
still need to prove it's the range of A don't I?
orthogonal projection ONTO the range of a
On these questions, you have to remember to show that the orthogonal projection P is actually the projection onto the indicated subspace, that's some clarification he gave us
Yes yes that's what i meant by not enough
Question 3.12
Whats the area of f(triangle PQR)
When triangle PQR has a area of 6
Isnt it just 6 times (2x2+3x8)?
no
aaaaaaa
ok solved it, just a misstake, instead of substitution i used addition
thx anyways @vast torrent
could use some help getting started with this problem 🙂
@earnest onyx post your work, i wanna see
I thought isomorphic meant it had to be invertible
In linear algebra, you can quickly show two spaces are isomorphic if there's an invertible matrix that takes the basis of one to the basis of the other
Wait that doesn't work here does it?
Still, think in terms of bases
Trying tothink if there's a quick.way to do this rather than needing to.solve a system
My gut tells me it will be easier to find S-¹: V to R²
And then invert it
Anyway the idea is
To pick a basis of R2 {e1,e2}
and simutaneously solve
S[e1] = [1 1 1]^t
S[e2] = [2 0 -1]^t
Because to define a map on vector spaces you only need to consider how the map acts on a basis
If you choose {(0,1),(1,0)}
Shouldn't be too painful
Feel free to come back later :)
Hey the way my prof teaches the course makes it hard for me to actually learn the material and I tend to learn better in a lecture setting. What YouTube channels or website do you recommend to use as review and help me understand the material?
@uneven peak khan academy and 3blue1brown series are great resources
Thank you so much, gonna binge watch those over the next few weeks
Ted Shifrin has good videos if your course is heavy on Calculus @uneven peak
Depending on what the curriculum is
Ok will check it out too thanks
what is this symbol called?
im studying eigen vectors/values and they dont say what it's called
Greek letter lambda
👍
@opal plaza i think theres a better way to do it
for a function to be linear and one to one it means that:
1)its ker(f)={0}
2)its space of arrival must be R2
what does it mean to be onto btw?
Surjective
ok cool thanks
i think you can just stick in the values made from the bases of arrival?
Just like this no?
It is linear and one to one
And onto
Thats what you would get presumably solving the system of equations
You just did it by inspection , right?
yeah
i mean you can sort of see it straight away
as if its rank is max so 2
it means kerf={0}
(by considering a matrix A made from the two bases of V)
which means that only the 0 vector goes into 0 (injective);
you also know that dim(kerf)+dim(imf)=2, so that makes dim(imf)=2, which means that its also surjective
(you can also check it by the rank of the map)
@vast torrent you got it?
it is
It is, but rank nullity doesn't tell you that
you can use it to tell if a function is surjective
I think you're making it too complicated
if dim(imf) is equal to the dimension of the space of departure
If the functions maps a basis to a basis
it has to be surjective
That's all you need
if the rank of the matrix of arrival was 3 (which is not this case)
it would not be surjective
by definition
each vector has to depart and land in the same dimension
If you prove S maps any basis of R2 to a basis of V
You don't have to check anything else
S?
ah yeah
Youre not saying wrong things but youre overthinking it
yeah but you dont have to do any calculations this way
We can use your function
And note that it maps the standard basis of R2 to the given basis of V
That's it
You did that for us
yeah but that function was made using that reasoning
yeah but which takes more time?
I don't know, which?
i just think its an elegant approach to the problem
You don't need to check the kernel though
you can see it straight away anyways
Do whatever you think is easier for you
yeah
They picked first x2=2 and x3=0
Then x2=0 x3=1
it says "a" basis, they just picked ones to avoid fractions and because setting each variable to 0 except for one variable is an easy way to pick the vectors
What have you tried?
What does it mean for x to be an eigenvector with lambda an eigenvalue?
You might need to go back to the definition, nothing wrong with that
true
yeah i couldn't tell you that lol
so for x to be an eigen vector with lambda, the eigen vector * lambda equals Ax?
aye, $Ax=\lambda x$
RokettoJanpu:
I'm trying to convert a complex number to polar form
z = 3 + 3i
how do i find theta if the point is (3,3) on the unit circle?
how do i find the angle of (3,3) on unit circle?
the point (3,3) is not on the unit circle
@distant chasm
Draw a line to (3,3). What's the angle between it and the x-axis?
Note (3,3) is not in the unit circle. That is, the modulus is greater than 1
To polar form you need to find “r”
Take the coeff of the real and imaginary parts, take the sum of the squares and square root that value (like Pythagorean)
sqrt(3^2+3^2)
=sqrt(18)
To find the angle, the equation works out graphically to be cosx=coeff real / r and sin=coeff imaginary / r
It’s the angle shared by those 2 values
For cosx=3/sqrt(18)
Bad question though no exact values
For angles
The formula for polar form is
re^i(x)
If I recall correctly
(3,3) has nothing to do with what’s on the unit circle
if you multiply the vector by the matrix, you get a zero vector
is that what you mean?
Is 0 a scalar multiple of (4,-3,1)?
what is the scaling factor
i was gonna say that its not an eigen vector but i checked the answer and it said it was idk im confused
if there is one
is there a constant you can multiply (4, -3, 1) by
to get (0, 0, 0)
0
then that's an eigenvalue
isn't it?
by definition 0 would be an eigenvalue
the vector is being scaled by a constant when multiplied by a matrix
true
An eigenvector can't be 0, but 0 can be an eigenvalue
We define that the zero vector doesn't count as a basis eigen
Note that the zero vector is in every eigenvector space
I’m confused I thought eigenvector was defined as (lambda*I-A)x=0
Nuu. Eigenvectors and values are defined as v and λ that satisfy
Av = λv
That is, v is the vectors that don't change direction through your transformation
And λ is the amount they are scaled by
You can use that to show that
det(Α - λI) = 0
But that's a result and not a definition.
I see okay
It's useful to find them with
The only way 0 is an eigenvalue is if there's a non-trivial way to send a vector to 0.
Ergo, non-invertible matrices have 0 as an eigenvalue
Sorry for the blurry pic but this is mostly what you meant right
The notes makes sense now thanks
Hey, so I ran a matrix through a calculator, and it says that the eigenvectors are (4, 2, 0) and (-3, 0, 2). But I got, from my own calculations, (2, 1, 0) and (-3/2, 0, 1), which are simply multiples of the the calculator's result. Am I correct, is the calculator, or is it equivalent?
does anyone know where to get started? I know that (3,3) must be 0 , apart from that I'm stuck.
Could someone explain to me why R_y(theta) or a rotation about the XZ plane is different from the other two?
In other words, why is theta negative here?
it's... not?
It is, theta is negative in that rotation matrix compared to the others
cos(-x) = cos(x) and sin(-x) = -sin(x), it's just simplified
I don't really get your thing but maybe it's something to do with these matrices being formulated in a different handed coordinate system than the one you're using?
I'm mainly asking because I want to develop matrices for rotations in 4D and I'm curious if the XW, YW, and ZW planes will have similar exceptions like that
it's not an "exception" it's a choice
flip the sign if you want
there's no god-given coordinate system or choice of where to rotate in any given plane
Got it
how can I prove the first part
Start writing it out
What would it mean by e is eigenvector of G? Can you write it in a mathematical equation?
$G\mathbf{e}=\lambda\mathbf{e}$ for some $\lambda\in\bR$, assuming you're working with real numbers
Rijinaru:
yeah i got to that part I just can't seem to show it
since we are adding identity matrix
it seems confusing
what is $(G + kI)\mathbf e$?
Ann:
Checking if a matrix A is orthagonal by taking the matrix itself multiplied by its transpose A^T equals the identity matrix.
If I have (1 / 3) in front of it and get a diagonal matrix with 9s? Is it wrong to simplify it to the identity matrix?
1/3 in front of what
The matrix calulated by:
A * A^T
So
(1 / 3) (A * A^T)
is A simmetric?
...
A is a diagonal matrix with 0s and 9 in the diagonal.
so it is simmetric
what the fuck are you on about.
you're giving the same name to what appears to be 3 different things
who cares if it's symmetric
who cares if A is symmetric
was just trying to help but ok
if AA^T = 1/3 * 9I = 3I, then NO, A is NOT orthogonal.
Okay, thanks.
maybe you mean f^2(v)? because that would be f(f(v)) = f(lamda v) = lambda f(v) = lambda^2 v, assuming f is linear
@lone quail
could anyone give me any tips on how to start this problem
can't use quadratic formula since too many terms
should i convert it to polar form?
gfauxpas:
Can someone tell me what I'm doing wrong lol
not sure if i'm even supposed to be doing that for these types of questions
u found the nullspace
you want to find which vectors
form a basis such that you can form other vectors for them
since you found from RREF that the first two vectors in the matrix are linearly independenat( pivot columns)
then the vectors that span the basis are
the first two vectors
i.e the standard basis of [1,0], and [0,1]
sorry since its R^4 it should be
[1,0,0,0], [0,1,0,0]
:/ that didn't work
does this prove that tr on tensors is well defined?
or can anyone give me a hint
<@&286206848099549185>
so if you have a lower triangular matrix or upper triangular matrix, the eigen values are the diagonal entries of the matrix?
@north sierra yes
probably "advanced mathematics" since that's the one that isn't obviously not fitting
thankd
quick question
Lets take <v1, v2> as an example
I know that for inner product spaces, there is conjugate symmetry
but for the dot product, if I have computed <v2, v1> first, I would get the same answer if I computed <v1,v2> first
why is that?
$\left< (x_1, y_1, z_1), (x_2, y_2, z_2) \right> = x_1\overline{x_2} + y_1\overline{y_2} + z_1 \overline{z_2}$
Ann:
this is the complex dot product.
those looks like high school subjects
so linear algebra probably falls under none of them
I'm confused by this question in my linear algebra book, any help is appreciated. Trying to understand it.
Describe all solutions of Ax = 0 in parametric vector form, where A is row equivalent to the given matrix. 11.
,tex $ A = \begin{bmatrix}
1 &-4 & -2 & 0 & 3 & -5 \
0 & 0 & 1 & 0 & 0 & -1 \
0 & 0 & 0 & 0 & 1 & -4 \
0 & 0 & 0 & 0 & 0 & 0 \
\end{bmatrix}
\sim \begin{bmatrix}
1 & -4 & 0 & 0 & 0 & -5 \
0 & 0 & 1 & 0 & 0 & -1 \
0 & 0 & 0 & 0 & 1 & -4 \
0 & 0 & 0 & 0 & 0 & 0 \
\end{bmatrix}$
I reduced to echelon form and can see that columns 1, 3, and 5 have pivots, thus leaving columns 2 and 4 as free columns. Writing it out in linear form gives:
,tex $
x_1 = 5 + 4x_2 \
x_3 = -1 \
x_5 = -4 \
0 = 0 \
$
I think the final parametric form would look something like:
,tex $
{ x_2 \begin{bmatrix} v_2 \end{bmatrix} + x_4 \begin{bmatrix} v_4 \end{bmatrix} : x_2, x_4 \in \mathbb{R} }
$
But I'm not sure what v_2 and v_4 would be... or if I'm correct with my approach. Thanks in advance.
czloc:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
@north sandal
That's correct. What are v2 and v4?
The final parametric form is
x1 = 5 + 4t
x2 = t
x3 = -1
x4 = s
x5 = -4
$5^{12} - 5^{10} = 5^{10}(5^2 - 1)$
Ann:
i know but like
im studying for this psychometry test
and i have to find a simplified form of this equation
Equation??
RokettoJanpu:
Cannot split a difference under a sqrt like that
Good books to study linear algebra?
you may want to get comfortable with prealg-algebra before tackling linalg
if i know that det(M)=0 where M is any given square matrix
then does det(M-lamda*I)=0, whatever lambda (the eigenvalue) value is?
what do you think?
probably
no actually of course it is
because im setting the equation to 0 lol
sorry im a bit tired, i prob did 10hr study today
@lone quail im not sure i understand the q actually
If det(M) = 0 then there is no identity matrix or am I wrong?
yeah but if det(M) is 0, it means whatever the eigenvalues are, then det(M-eigenvalue *I) will always be 0
There's a theorem, not sure what you're looking for
detA=0 iff 0 is an eigenvalue
yeah
yeah, what i was asking was that if the other eigenvalues subtracted to A would give determinat 0
which of course must be
Well you're solving for those lambda that make it true
As long as your scalars are algebraically closed, there's at least one
yeah
what do you mean by scalars are R?
If you insist on your scalars being real
yeah ok i get what u mean
det(A-lambda I)=0 might not have a solution lambda
yeah thanks
Np
<@&286206848099549185>
det linearity
What?
like
when you have a determinant, and you multiply say 1 row by a scalar, it multiplies the determinant by that
there's a fairly simply proof for that
Yeah i know that
How does that help me find the answer?
Cant see how that helps find n
imagine multiplying every column by 7
row and column is interchangeable in this
how would that change your determinant
That would multiply the dterminant by 7
Or rather 7^n where n is the number of columns
yes
Ok
precisely
How does that help me find n?
n is the dimension of the matrix
As an answer?
7^n *-2
Oh good idea dude let me try that
You are a legend it worked
I overthought it
I thought you had to find n but n is actually just a part of the answer
Thank you bullton
@cursive junco express x,y,z in terms of two new variables t_1,t_2 as shown above then substitute into the vector (x,y,z)
What’d you try
Show work?
Neither point lies in the intersection
Review your notes on finding plane intersections (you need a direction vector and a single point)
Definitely google this, attempt the q, come back if stuck
@wintry steppe does it have to be linear algebra
yeah
or AP calc bc
which is calc 1 and calc 2
im taking calc 3 next semester
i have a 99 in linear algebra rn
so id say im fairly good at it
@sonic osprey
@wintry steppe
Why is it that A is orthogonally similar to B if and only if h=0?
(the two matrices in the middle of the page)
the definition of orthogonally similar tells me that there exists an orthogonal matrix P such that P^-1AP=B
the answer in the textbook however, tells me that for A to be orthogonally similar to B it must be symmetric, why is that?
Well assume A is orthogonally similar to B
Then A = Q^T * B *Q
For some orthogonal matrix Q
Then we get A^T = Q^T * B^T * (Q^T)^T = Q^T * B *Q = A
so since B is symmetric, A is also symmetric
No problem

How would I solve this question?
I tried using cross product but did not work because you can't use cross product with matrices
⚡Amphy⚡:
the important thing is that v is a nonzero vector
I am not sure I know where to go from there
can you recall that matrix multiplication can be thought of as a combination of the columns?
you see it now?
yup
Cool question
we have a nonzero vector in the nullspace of E, so then we are working with a singular matrix
Yup, I got it. Thanks dude. E's rank is at most 2

If $\mathbf{v}_R$ and $\mathbf{v}_I$ and the real and imaginary parts of an eigenvector, what does the notation $P=(\mathbf{v}_R,\mathbf{v}_I)$ mean? Is $P$ just a coordinate?
Gamedolf:
Compile Error! Click the reaction for details. (You may edit your message)
"An introduction to Eigenvalues" section in this book
it says predict what shape you will gert when you multiply some points in a previous step by P^-1
i guess P can't be a vector because no inverse
no like can you give me a page
or sth
i want to see what context this notation is used in
sec
yea
hmm
oh is it the $\begin{pmatrix}a&-b\b&a\end{pmatrix}$ thing
how can I determine the values of k.
In the mark scheme, it says something about taking the vector product
please help
Gamedolf:
Compile Error! Click the reaction for details. (You may edit your message)
@sturdy abyss any value of k that makes anything in parentheses to the n-th power less than 1
because then as n goes to infinity the terms will goto 0
specifically work the 7k to find it because making sure the largest coefficient term is less than 1 for some k in general makes all the smaller terms less than 1 for that k aswell
@austere creek what book are you using
help me
there was a method to solve linear equations by matrix method named after a guy i forgot the name
Gaussian elimination? Gauss-Jordan elimination?
Hello, I am not sure my math is correct in this mechanics problem, I seem to got something wrong here, would appreciate all help I can get, tried to solve it for several days and this is my best attempt (most of the problem is just pure mathematics, linear algebra and system of equations, if you are not comfortable with the physics, just ignore it and focus on the math, thanks)
my try: https://imgur.com/gallery/UfF55tq
I tried to find the spring constant ”k”
The unstreched spring has a length of ”d”, and the table mass ”m”, express the spring constant ”k” in terms of, ”m,g, a” and ”d”
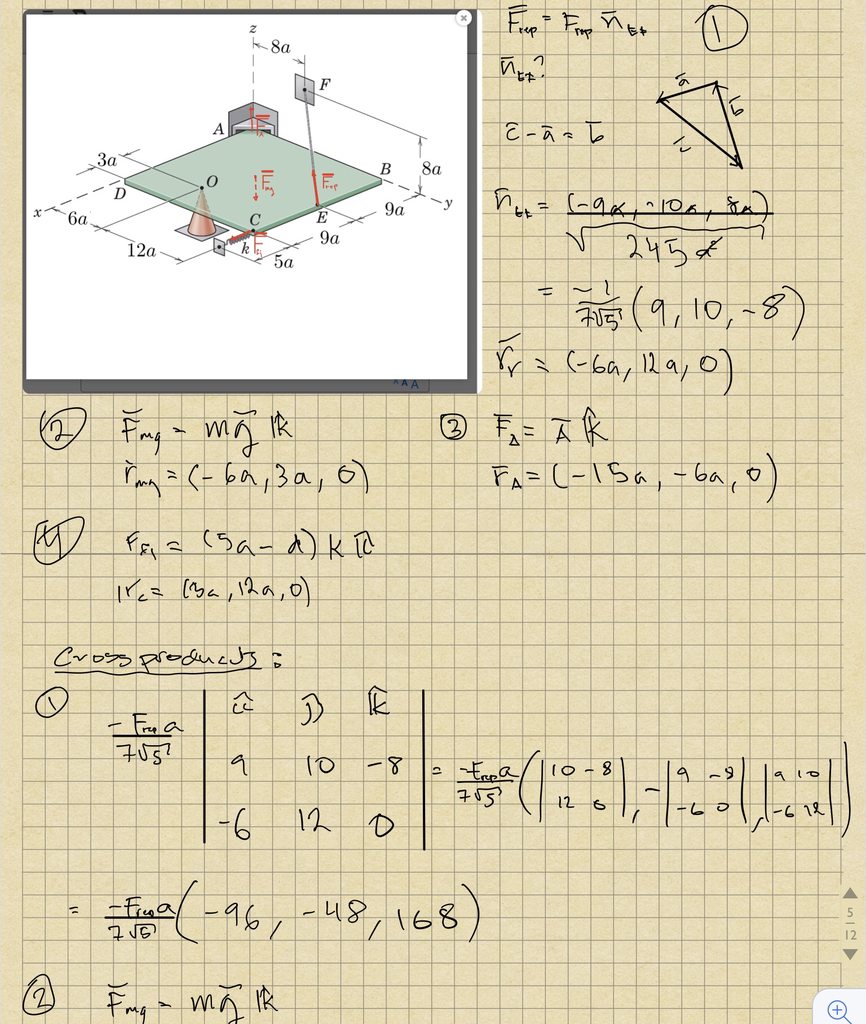
@eager kestrel the second term in your cross product is incorrect. It should be a positive 48
Where is F_mg acting? Is it acting at C or is it at the center?
Never mind. I see.
@clear otter yes it should be 48 i saw that after posting
But the answer is still wrong
Also mg should be negative
But still wrong
I would guess its acting at c
Have you done mechanics?
Its just a basic course, would mean the world if you tried to solve it
You should have positive 96 as well but unsure if that affects the answer
@eager kestrel you're taking the cross product because you're looking at moments about point O?
Exactly
Thanks for pointing it out
@clear otter is not harder than that
And since i know its suppose to be equalibrium
Just set each component to zero
And solve system of eq for k
Correct.
Sum all of your forces and set X Y Z to zero. Then sum all of your moments about some point and set them to zero.
Personally, I'd recommend choosing a different point than O for finding moments because it'll let you ignore the contributions from a different force.
I have a short question. If you have some vectors in the room R^3.
How can you determine the point / line / plane for these vectors?
What do I need to learn in Linear Algebra to accomplish this (It is a Matlab assignment)?
You did not. You're taking your cross product with respect to O.
But it does aleeaddy
Oh I see, there's more than one page 🙃
Ah right
@eager kestrel I'll try to quickly solve this and let you know what I get for k.
if A and B are both similar and diagonalizable, so there exists matrixes P and Q so that:
(P^-1)AP=D and (Q^-1)BQ=D.
by transitivity, the textbook says, that the basis by which f is represented by B is formed by the columns of P(Q^-1), why is that?
For reference A is actually the representative matrix of f while B is the botton matrix
okay great, means alot to me, when i changed it to 96 I got the answer:
(21mg)/(64*(5*a-d))
Oh sorry thought you finished
@eager kestrel is that the correct answer?

@eager kestrel this system of equations is a pain.
Just solve for A like I did
Then put A in both of the eq equal to each other
From x and y
And then put inside sys of eq for z
You dont have to simplify, i can plugg in big answers!
@clear otter
Lol,I know how to solve
It's just longer than I'd like. You just need k right?
@eager kestrel k = 21mg/(24*(5a - d))

Somewhere you missed something aswell
thanks for trying, although you seem to missed something, unfortunately
@clear otter
HMMMMMM
Is that green underline where it's saying the problem is?
oh shoot. I see where my problem is.
no its just where I put the cursor when I type the answer in
ah great that you found it! really getting me excited
https://gyazo.com/7de2c199bf06eab342c467aa8120eac9 feel bad for you now :/ welcome to my world!

@eager kestrel I'm not sure then. I've double checked my moment equations and they all look fine. That should be the correct answer.
When doing your cross product for Fmg, the second component should be negative. That should be a negative 3a.
Your 6a should also be positive in that cross product. Look at your origin.
Let's say I want to project (\mathbf{x}) onto the subspace (V) where (V=\text{span}\left\lbrace\mathbf{b}{1},\mathbf{b}{2},\cdots\mathbf{b}{n}\right\rbrace) then I know that (\text{Proj}{V}\left(\mathbf{x}\right)=A\left(A^{\text{T}}A\right)^{-1}A^{\text{T}}\mathbf{x}). However I also know that if my basis vectors for (V) are orthogonal then I can also compute the projection with simple dot products. Can someone explain to me how the general matrix product simplifies when the basis vectors are orthogonal? Thanks!
Noether:
I forgot to add that A has the basis vectors as its columns.
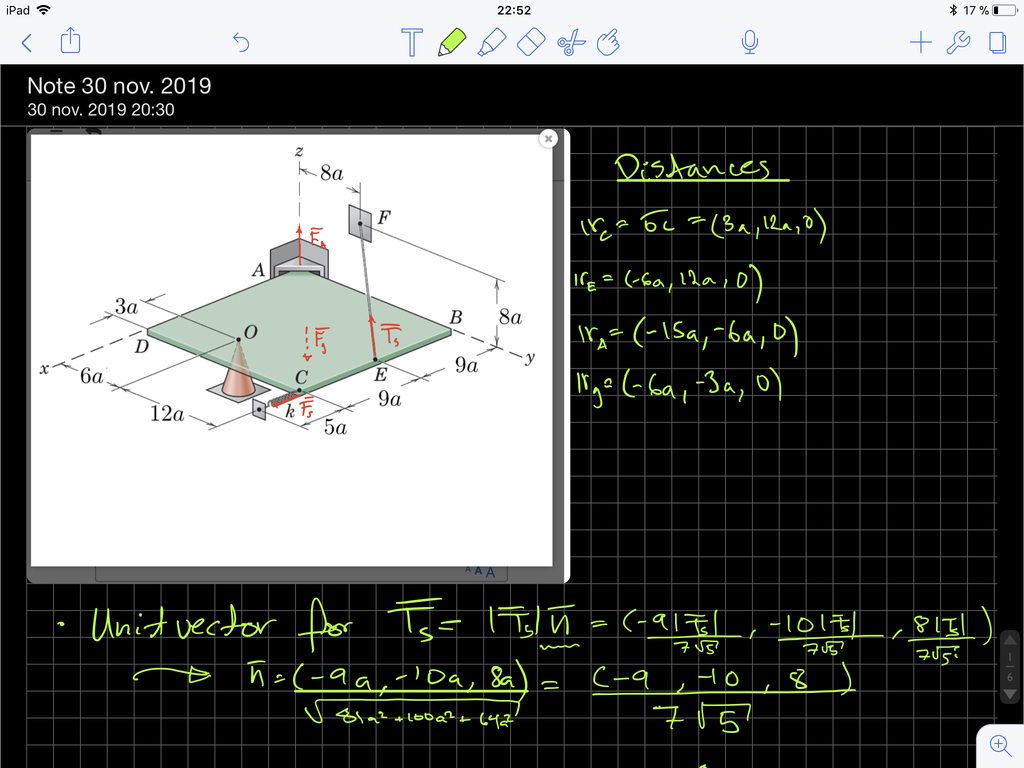
@clear otter https://imgur.com/gallery/1qwe6UJ
{kind=link}
{kind=link}
new solution, i think that a problem might be thr gravitations force in the ceneter and the force at A
since if you look at the second to last page
you see that the magnitude of vector |Ts| is equal to a vector, which is impossible
but if I dont equate the A vectors, I dont get the problem
how to deal with this? not sure..
If someone has a sec could you please help me check work. I found a vector of 6x_1 = 9x_2 so I think the basis would be [2,3]? Also trying to conceptualize what exactly this vector means in relation to the original matrix? ty ❤️
is 6(2) = 9(3)?
I make that mistake too sometimes
you meant [3,2]
how many eigenvalues and eigenvectors do you have?
just one, 4
I believe it's 1?
I dunno, I didn't solve Av = 4v, I'm assuming you did
I don't know if the solution space has dimension one or 2
one
gonna quickly plug into symbolab eigen finder to confirm
lol I just did for wolfram alpha
then you only need one vector for the basis
if the vector satisfies Av=4v, you're done
d'oh, too fast for me
Noether:
you dont need to delete, let other people see it
Guys I need a math pro to be my guru 😭
if A and B are both similar and diagonalizable, so there exists matrixes P and Q so that:
(P^-1)AP=D and (Q^-1)BQ=D.
by transitivity, the textbook says, that the basis by which f is represented by B is formed by the columns of P(Q^-1), why is that?
For reference A is actually the representative matrix of f while B is the botton matrix
{kind=link}

@finite sleet you can do this a better way
responding to your question earlier in #help-2
use this:
and decompose your matrix into A = (a-1)I + 1*t(1)
then you have the inverse to be:
$\frac{1}{a-1}
\left( I_3
-\frac{1}{(a-1)+\mathbf{1}^\mathsf{T}_3\mathbf{1}_3}
\mathbf{1}_3\mathbf{1}^\mathsf{T}_3 \right)$
davidL:
expanding:
,w (1/(a - 1)) ({{1, 0, 0}, {0, 1, 0}, {0, 0, 1}} - (1/((a - 1) + 3)) {{1, 1, 1}, {1, 1, 1}, {1, 1, 1}})
Requested by davidL#1578
solving:
,w Simplify[((1/(a - 1)) ({{1, 0, 0}, {0, 1, 0}, {0, 0, 1}} - (1/((a - 1) + 3)) {{1, 1, 1}, {1, 1, 1}, {1, 1, 1}})) . {1, 2, 3}]
Requested by davidL#1578