#linear-algebra
2 messages · Page 46 of 1
seems to have terms of (a+b+c)^3 in them
going to need some kind of polynomial identity in mind
the truth is, someone started with some formula, and then they just messed around with it until they got this meaningless thing
and now it's your problem
I think if you work one piece at a time, make the a+b+c part and get that to work, it would eventually yield
I have no idea man, I tried tons of shit, and adding row2 and row3 to row1
and it gets real real weird
🤔
@sinful heron antisymmetry
the vectors are oppositely symmetrical?
antisymmetry just means reversing the order makes it negative
oh
I'd've said anticommutativity
so the LHS =
(d-c)(d-b)(d-a)(c-b)(c-a)(b-a) ?
Zoran maybe it would be easier to replace the lhs with that formula
Yes
Not sure if that helps
🤔
let me take a crack at it with that try
I think I'll just go to bed, take it on fresh next morning
normal vector
to each respective plane?
ya
i see thx
if i take the cross product of these two vectors i should get the vector of the line that's parallel to the intersection line for the two planes
yep
@wintry steppe The RHS is homogeneous of degree 6 (like the LHS) , so you just need to conclude that it is 0 if any two of a,b,c,d are equal.

what do the sets actually mean?
so there's a vector such that a + b + c = 2 i dont really understand what that means
i know how to answer the question but like i dont get the notation
{object : condition} is the set of all objects for which the condition is true
i.e. for example
$\begin{bmatrix} 4 \ 7 \ -9 \end{bmatrix} \in W_7$, because $4+7+(-9) = 2$
Ann:
while $\begin{bmatrix} 1 \ -4 \ 2 \end{bmatrix} \notin W_7$, because $1+(-4)+2 \neq 2$
Ann:
(W_7 here means the set given in exercise 7)
okay makes sense, thank you!
Hey, if we are given a matrix M = diag(d1, d2, d3, ..., dn), does the "diag" notation imply that M is a diagonal matrix or does this notation just tell us about the diagonal entries?
context:
"A,D exist within the set Mnxn(R) and D is a diagonal matrix. Let D = diag(d1, d2, ..., dn) for some d1, d2, ..., dn that exist within the set R \ {0}, show that D is invertible and that D^-1 = diag(d1^-1, d2^-1, ..., dn^-1)"
is the D^-1 implied to be a diagonal matrix? It would seem so according to my intuition. But I'm not entirely convinced.
Anybody willing to help me with an explanation? I think I'm good on what the actual answer is but putting into math terms is a little harder for me.
Tha basic gist I can muster is that you end up with the same set of vectors back because when you take the projection of one vector onto the other you'll get zero.
So when you subtract your projection from the second vector you just end up with that vector as your result.
Does that make sense?

As a side note to my original request, this is what I have written down.
just want to clarify some things about notation
in the above picture, when it say T(v1), do they mean the 1st column of T (that's it) or that T acting on basis vector v1 (i.e T v1 = T(v1)) gives me the 1st column of T
i tried doing it that with some numbers tbh(should i post it here?) but the results don't match with T acting on v1
hmmm
Hey, nice excel work
^^
yup
i was using 2 different bases
i know that the Ts would be different in terms of physical meaning(same element, different bases), but was trying to show that in the 2nd case, T(v1) = 1st column, which i couldn't get it
T(v1) = (2,1,3)
In the second case. If your math is right.
I feel you might be trying to suggest that both cases should be the same. Why?
erm...not sure if i can word it well,
I mean, given T(v1) = 1st column of T,
so, i just try to prove for myself?
and stumbled here
i was almost convincing myself that T(vi) is just a way of calling the ith column of T rather than T acting on any vector, but now, i am confused again
if v1, v2, v3 are the standard basis, then T(vi) = the ith column of the matrix representing T
this is a bit more fundamental than you would think
Hey can anyone explain how principal component analysis works to a 2nd semester linear algebra student
I want to understand word2vec better
@sinful heron get the vector line equation
u have P=r + kv where v is the direction vector
work out requirement for k such that distance is 3
then add n subtract
okay ill try the vector line equation but I also don't quite understand what it means by distance 3
does it have to do with the length of the vectors
@wintry steppe did you figure out the vandermonde thing
Can i hear how to do it
It's a lot easier if you go at it from the right side to the left side
By manipulation you get a triangular matrix with all the factors that the Vandermond matrix has
Ah
And the manipulation is: all rows - first row; factorize what you can (on the first step you're able to factorize (d-a)(d-b)(d-c))
And then expand along the first column
At least that's how I found it easier to work with
Ah so you did use the formula (c-b)...(b-a)
Ye ye
We know the LHS = (d-a)...
So let's see if it's the same for the right side
Is basically what my mate told me when he figured it out
Still an awful fucking problem
😠
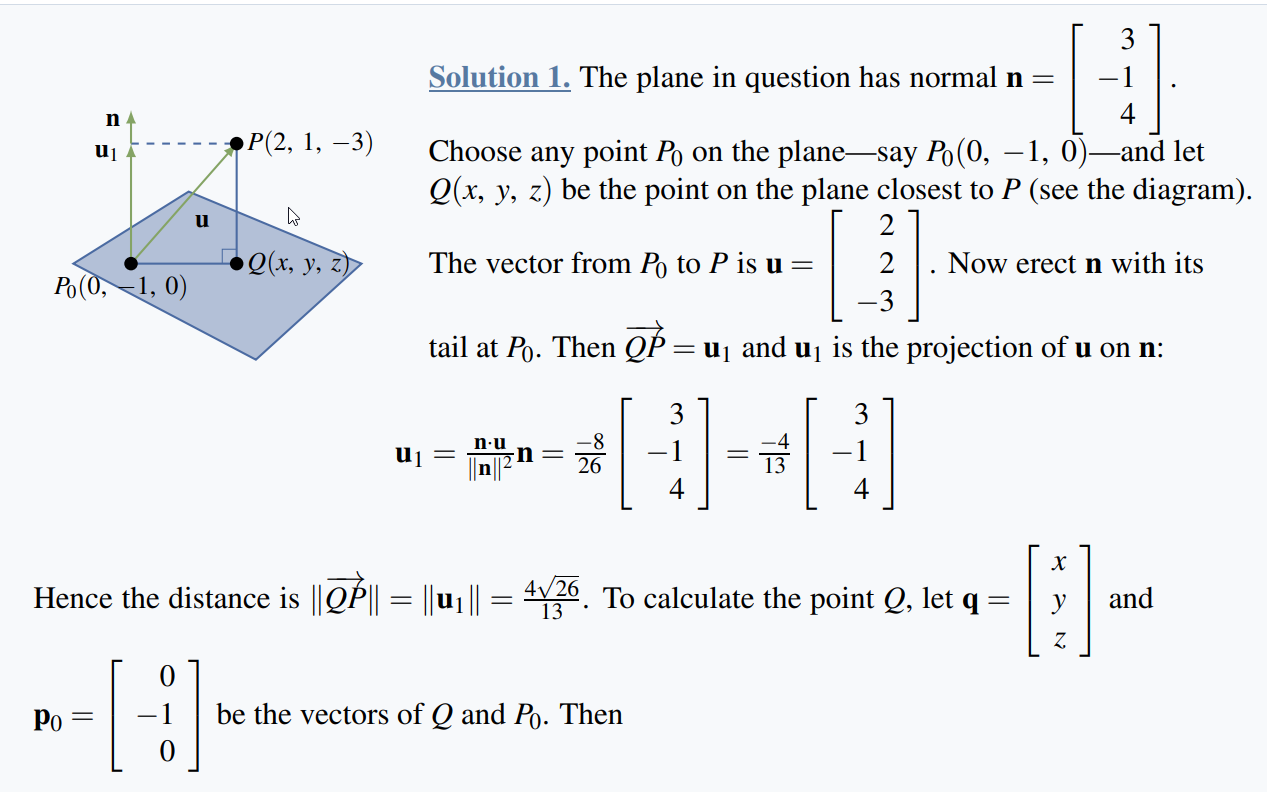
does any1 know how they get 4(sqrt26)/13?
I've been trying to figure out how to find the shortest distance for a long time and this is the part I think I'm getting stuck on
thanks That was my first thought but I used the wrong vector somehow...
Repost as I posted it wrong
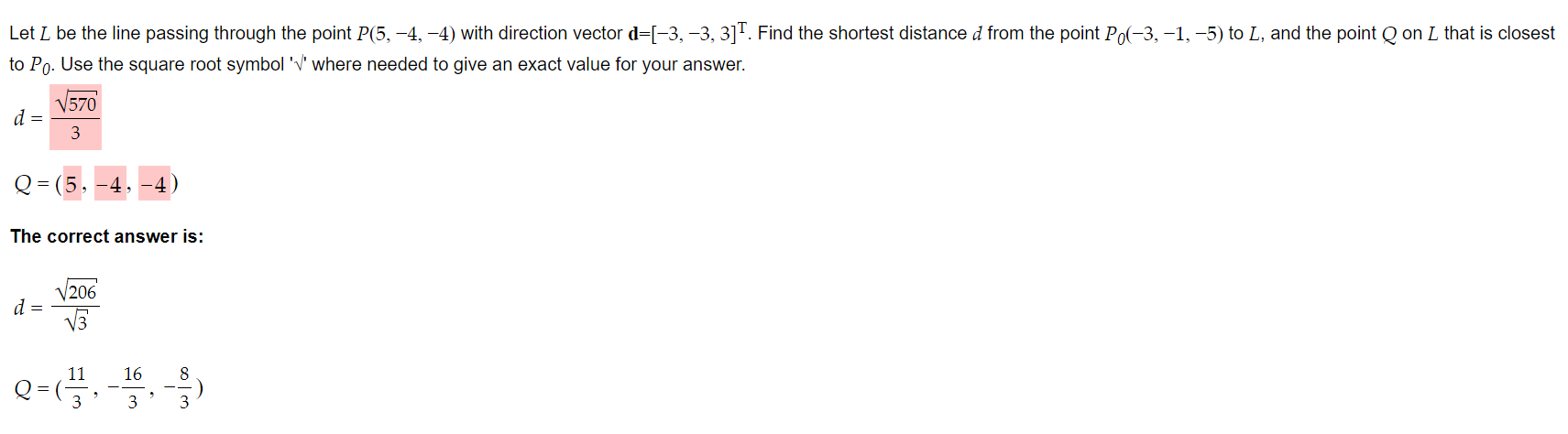
I'm trying to find shortest distance and point Q, IDK what I'm doing wrong
kinda struggling with where to start with this question could use a push in the right direction ❤️
well first off, what are the dimensions of the matrix for T?
can only be two possibilities, 3x4 or 4x3 right, which is it? @opal plaza
umm it would have to be 4x3
so I'd have to figure out what T is?
1 1 0
0 0 0
2 0 1
0 1 1
Would it be the first two colums of T, since one row is all zeros?
@carmine terrace still need help?
@clever cedar I was able to figure it out. Thanks for offering the help
nice, np
that question was on my exma last friday
exam*
so make sure u know it :p
I did it so many times I have it engrained in my memory.
Can someone explain the wording of question 8. I'm confused about the definition of e|x=7(f)
@wild pagoda it evaluates a function at x=7
don't all functions equal f(7) when evaluated at x=7
consider f(x)=2x a function from R to R
No, e is the linear functional that evaluates any function at x=7
So like e(x^2) = 49 for example
hey, would someone mind reading my proof to make sure it's sound
i'm too tired to read it myself and have it make any sense
here it be, out of Axler's linear algebra done right
this is literally the longest and hardest proof ive ever written so im like nearly certain it's bunk
i think ive got this one down intuitively but im just checking
I want to make a convolutional neural network that scans over the elements of a matrix where the matrix is of form
\begin{bmatrix}
a_1_1 & a_2_1 & a_3_1\
a_1_2 & a_2_2 & a_3_2\
a_1_3 & a_2_3 & a_3_3
\end{bmatrix}
The Red Team Is Online:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
where the rows and columns can be arranged arbitrarily
what is the complexity of doing the 2x2 convolution over every arrangement of row and column for an nxn square matrix?
Without any optimizations my naive answer is (n!)^2 which is... completly unfeasible but since I'm after the 2x2 convolutions specifically I'm trying to figure out how much complexity can be removed through symetries
its proably something basic I've forgotten / not realised I can apply here though thank you in advance for any help
In triangle ABC let P and Q be points such that B->P = 1/3 B->C and A->Q = 1/3 A->C.
S is the intersection of lines AP and BQ.
Find A->S as a linear combination of A->B and B->C
Graphically it seems to look like
A->S = 2/3 A->B + 2/9 B->C
But I can't figure out how to get there 'normally'
If S is a finite subset of Rn
and Span S=V, then S is always basis for V
what would be the answer to that t/f question?
Well... I'd assume yes, obviously, unless I'm missing something
you are

ohh basis
Yeah some elements of S might be linearly dependent on each other
Which isn't allowed to happen in a basis
gotcha
ew wording
engineer wording
ty thats what I was thinking but wasn't sure
hi, im trying to find if a system of linear equations has an infinite number of solutions, the equations evaluate the same when i sub one value of a into them but differently when i sub the other value of a into them, also i only came up with one value of b
have i done it right?
sending pic
i misread the question sorry pff
the question asked for which pairs of a,b does it have infinite solutions..both pairs won't work
So you need to find the combinations of a and b resulting in infinite solutions, yes?
yeah
i found out it's a=2, b=2 but i only got one value for b anyway, but for a i got 2 or -2
idk if i should have 2 values for b
I think you would have 2 b values.
Rearrange the first equation in terms of x and plug that into the second equation.
If a is 2 or -2, you'll still have the y terms cancelling, yielding a = b
so the pairs of solutions are a=2, b=2 and a=-2, b=-2 ?
Yes
im struggling to do that rearrangement, this is what i got so far
x = 1-ay (first eq. rearranged)
2(1-ay) - 4y = b
2-2ay-4y = b
In the second line, keep it as a(1 - ay) before plugging 2 in for a.
Oh wait
1 + ay = x
In your first step
If we have $[L]_B = P^{-1}[L]P$, where $P^{-1}$, $[L]$ and $P$ are matrices, can we do
$P^{-1}[L]P - \lambda I = P^{-1}[L]P - \lambda P^{-1}P = P^{-1}([L]P - \lambda P) = P^{-1}([L] - \lambda I)P$?
Liria ^(;,;)^:
Or do matrices not work like that
im trying to relearn everything in linear algebra so i can actually understand anything else my professor defines
can someone help me with this definition
read this in english
what it's basically saying is they have some operation that takes two things from V and maps them to 1 thing from V
and specifically that map is (x,y) |-> x+y
that make sense or still not completely clear yet @thorn egret
i mean i get all of it from the beginning
im not completely new to this
but im trying to figure out if there's a clear formal meaning to all of this, like even the ","
There's no formal meaning to the comma no
The rest of it, yes there are formal meanings to it
i know that | means "such that"
The : means that + is a function
Then it describes the domain and codomain of this function respectively
yeah i get that
the reason i want to relearn all of this is because
when i get into the real rigorous stuff
everything is defined as an ordered n-tuple
a "vector spaces over a space F" is defined as an ordered 3-tuple V = (V, +, *)
such that : (image above)
also im aware its not called a 3-tuple but my english is really bad
3-tuple is what you would call it
Yeah depending on what linear algebra you're exactly trying to learn
You might not need all the formalism
"The relation ρ on a set A is every subset of cartesian products
A^n = A x A x ... x A"
i have no idea what this means
I mean yeah
If you're actually trying to learn this stuff, don't really look for linear algebra stuff
Look for some intro to proofs stuff
basically all of my courses are divided into theory and practice, i get half the points from a practical exam and the other half from an oral theory exam on the whiteboard in front of my professor
@sour spear thanks
i don't know if i have to learn all of this or not
linear algebra is sometimes the course students are introduced to basic proof concepts
but seeing as the vector spaces you first learn about are cartesian products of fields numbers, you should know what the cartesian product of sets means
and a relation is a subset of the cartesian product
that's a definition, not a theorem
thanks
But yeah, looking for linear algebra resources on this isn't really what you want
Pick up an intro to proofs book
Like How to Prove It by Velleman
for information on this type of stuff
you're right
i just spent so much time trying to figure out the difference between a ring and a field
and i realized we will never mention rings again in linear algebra
lol
probably the main takeaway for rings in linear algebra to remember is you can add and multiply matrices, but sometimes you can multiply 2 nonzero matrices together to get the 0 matrix, and so you don't always have inverses to matrices meaning it's not a field
🤔
so what
probably the main takeaway for rings in linear algebra to remember is you can add and multiply matrices, but sometimes you can multiply 2 nonzero matrices together to get the 0 matrix, and so you don't always have inverses to matrices meaning it's not a field
just not sure waht you meant by that
just saying one example to help him see a difference between a ring and a field cause he doesn't seem to really remember
oh okay
if he's gonna forget it anyways, might as well say that one
last one, how do i read this and what does it mean
cant you have fields of finite characteristic? or am I thinking of rings
in a matrix? yeah
i mean specifically R^4[X]
i know what to do with it when i see it, i just dont know formally what it really is
maybe it means degree 4 or less polynomials in the variable X with real coefficients?
I'm guessing
actually no
I think what it means
is the set of 4-tuples, each of which is a polynomial in the variable X with real coefficients
so an example of an element of R4[X], if my guess is correct
would be (1+x^2, x^5, 1-3x+5x^11, 0)
the first thing it asks is to prove that V is a subspace of R^4[X]
so R^4[X] is a vector space, right
yes, an infinite dimensional one
wym infinite dimensional
know what a basis is
yeah
any basis of it has infinitely many things in it
oh ye
the 2nd thing it asks is to find dim(V)
we learn how to do all of these things in practice but i dont really pay attention in class when we explain theory
if it's the first class of linear algebra they will just want you to prove its infinite. or maybe whether or not it's countable or uncountable
if you haven't seen "countable" or "uncountably infinite" before then they just want you to show its not finite dimensional
but I'm not 100% sure that's what the notation means so Id prefer it if someone could confirm my guess
notation of whta
$\mathbb R^4[X]$
gfauxpas:
I guessed it's 4-tuples of polynomials with real coefficients
Oh this
This usually means polynomials up to and including degree four
At least in a linear algebra context
oh, for that I've seen $P_4(\mathbb R)$
gfauxpas:
But if R[X] means polynomials with real coefficients than R4[X] should mean what I said
oh well
yeah R^4[X] makes me uneasy like they're talking about polynomials of the form a+bx+cx^2+dx^3, I prefer the other notation
That's what galois says it means in lin alg
no he said something different
I put a degree 3 polynomial
cause there are 4 real numbers
lol
No joke
I know
I don't know what you think you're explaining to me, I was just expressing my discontent with that notation
I don't need a response really
i just always thought of R^4[X] as all vectors (u, v, w, t)
lol
if it's a degree 4 polynomial it would be like vectors of the form (a,b,c,d,e)
we literally don't even mention polynomials in this part of the course
ok I'm out of this channel for the next hour good luck lol
S[X] means polynomials of one variable
sort out what the notation should be from your book or teacher
That's what [X] in set notation means
You're right that there's an obvious isomorphism between polynomials with real coefficients and tuples of reals
Functions with domain V and codomain W
oh
is that all
really
Yes
I feel stupid for worrying
L(V,W) means those functions for which + and . Are linear
Note that the order is counterintuitive
Domain V, codomain W
Is W^V
K
they had the explanation of the L(V,W) thing above
but not the W^V thing
its 10:30pm now
gotta sleep
Bye
Bye
Could I ask a question?
I did part a but part b is kind of tripping me up
I first thought about doing a geometric series, but doing that proof of allowing that is hard
No you don't want to do that
multiply both sides by id-T should be easier
@half sentinel
Show that id = ... (id - T)
makes sense
then how would you do part c
would it be multiplying (s-t) to both sides of the idv?
Well if you derived what operator L satisfies L(S-T) = id
Then L = (S-T)‐¹
It's not always easier, but it's equivalent
That's what inverse means
I'm sure there's more than one way to do it
Terminating geometric series for inverses of nilpotent operators you can prove by induction if you want
Where 1/(1-T) is (id-T)‐¹
So that would be another way
Good practice if you're bad at induction 👍
Np
when it says T is induced by the matrix A
does it mean that the linear transformation for T occurs because of A?
Actually smores you can multiply both sides by id-T and still use induction
@half sentinel
It means T maps x to Ax
And S maps x to Bx
Np
what does it mean for $T: {R}^{n}\rightarrow{R}^{n}$ to be linear
mike0x81:
i understand that T is a linear transformation
but what does it mean for it to simply just be 'linear'
the same thing
mike0x81:
in the context of linear transformations?
the regular arrow means domain:codomain
the arrow with a flat tail means element of domain: element in codomain mapped to
$f: \mathbb R \to \mathbb R \times \mathbb R, x \mapsto (2x, x+1)$
gfauxpas:
and linear can be different than linear transformation
consider the indefinite integral
it's linear, but it's not a transformation
currently in calc 1
well you know what the definition of a function is, right
yh
if something isn't a function, like for example it's not defined for all value sin the domain
it can still be linear, in that when it's defined, it's linear for those elements for which it's defined
or, if something isn't a function because it's many valued
it sends one thing to two things
it can still be linear, but it's not a transformation
do you want an example
let's say there's the price function, that tells you how much something sells for online
then it might be linear, because price(2 pizzas) = 2 price(pizza)
but the price function isn't really a function, because not everything has a price
a transformation is a functio
n
something can be linear and not be a function, so then it's not a linear transformation
oh i see
you'll see an example of something that's linear and not a function because it's many valued at the end of calc 1
called the indefinite integral
it sends functions to a family of functions
Just to clarify, if you're trying to do a change of bases from some arbitrary base B to the standard basis, all you gotta do is take your original vector from B and multiply it by that basis to get the coordinate in standard basis
i hope that makes sense lol
also, can anyone here clarify what it means for a transofmration to be a basis B
$[T]_B$
MemesPlease:
@paper egret
I usually see [T]B refer to the matrix constructed by the basis vectors after they've been transformed
hmmm ic ic...
i actually have an explicit definition, but for some reason can't make some sense out of it
$[T]B = P{B \to E} [T]E P{E \to B}$
MemesPlease:
oh wait the arrows go reverse direction <-
@opaque sun , we have (A − λI)x = 0
so we want to find x, in the case of a 2x2 matrix, x = (x, y)^T
we can then find the values accordingly
you can do that as well
right?
x = (x,y)^T is just the same thing but now like a column like that picture
Solve for x in terms of y and z from that equation
right
And then make 2 eigenvectors from the coefficients of y and z
I.e y * (-1/2 1 0)
Imagine that's vertical. I don't know the code for the bot
If you think of the answer like x = -0.5y -z, y = y, and z = z
Then the eigenvectors are the coefficients of y and z
free variable
^
Solving a matrix/system of equations gives you x from the first equation, y from the second, and z from the third
But the y and z equations are all 0s
So y and z can be anything
Those 2 in the picture are right (it's your equation times 2 to get rid of the 1/2)
You want to split up the coefficients into y * (matrix of y coefficients) + z * (matrix of z coefficients)
When I get back to my computer I could type it out and it would probably make a bit more sense
(-1/2)
( 1 ) * y
( 0 )
(-1)
(0) * z
(1)
If I were on my computer it'd be prettier. I'll be back on it in 10 minutes or so.
@opaque sun
x = -1/2y - z
Which you got from the (1 1/2 1) matrix with the bottom 2 rows as all 0s
and the coefficient matrices would be your eigenvectors
Hey guys, could you help me out with this problem
what are you stuck on
Have you tried doing the proof
Well yes
Okay, and what did you do
of which i got an inequality that the addition of (x,y) and (y,z) to be greater than sum of (x,z)
n1 is norm 1
and z is some other vector
and I feel like that's not what it's asking for
Sure that's the triangle inequality
wait
But that's the triangle inequality for metrics
right
sorry if it's a dumb question but would the first step be taking the norm of itself then?
for a surjection does the Transformation function have to be of the same R^n as the vector X it transforms onto
im not sure who ur talking to 😦
not you
😿
the answer to your question is no
oh cool ty
hi @sonic osprey okay, so I eventually got that (x,x) for || x || 1 becomes 0, and that's why it does not satisfy the parallelogram law, correct?
i meant | | x | | 1
is surjective and injective mutually exclusive?
idk what bijective is
just learning about surjective and injective now
didnt mean to offend :p
sorry i didnt realize
no problem
bijections are defined to be maps which are both surjective and injective
bijective <=> invertible <=> columns of matrix form basis for target space <=> image of transformation is the target space
oo wow ty
ah yes, trivial kernel
the reason i ask is this
and nonzero determinant
it says if rank is n then its injective
but rank is m then surjective
so thats why
i asked
well if rank(T) = m then that means the column space / Im(T) has dimension m. Well, the smallest subspace of R^m which has dimension m is R^m itself. Therefore T is surjective Does that make sense?
Yeah I believe so, seems straight forward
In other words, since Im(T) = R^m, every element in the codomain gets mapped to, i.e. Tx = b has a solution for all b in R^m
Wrong channel. This is not college math.
Sorry
Go to #prealg-and-algebra
appreciate it
Hi, I was wondering which of the following ebooks is a recommended resource to understand fields and vector spaces?
- Linear Algebra Done Wrong
- Elementary Linear Algebra
- Linear Algebra Third Editiion
- Linear Algebra with Applications
- Abstract Algebra
I'm looking for a text which is a little noob-friendly 😄
yup, starting with that, in fact 😛
hi, im trying to solve using the Gauss method, im not sure where i've gone wrong here
for each row operation, can we only do it so that it makes a 0 or a 1?
what have you done in the second operation btw
added rows 2 and 1
my bad I didn't realise you wrote the operation above the matrix
wait
if you added rows 2 and 1 how did you get 0
for the first element of the second row
ahh
i was too focused on keeping it 0, i forgot to add to it
but then the operation is wrong
tbh my rre/gaussian elimination isn't particularly good as I'm pretty new to it myself xD
I was just having a read of this idk it might help you
ok thanks
@brittle orchid
Linear algebra done wrong is a great book, but may be pretty technical if you've never done anything technical. If you're really new, take an easy run through an applied linear algebra book. 3b1b can be a great complement to this
Afterwards, come back and get the details right
Ok does anyone have any idea how to start finding curves that are invariant under a 2d matrix transformation?
Curves? 2d transformation? What space are you working with?
It’s just a student at a class I’m a supervisor over has posed a question I said I would get back to him
Basically Cartesian transformation matrix a 2x2 one
wat?
How would I go about invariant curves in a way that doesn’t really involve eigenvectors stuff cuz they haven’t learnt it yet
We have invariant lines but what about invariant curves
you need to be more explicit...
"curves" is an odd term here. A space has vectors in it. If you do mean vectors, davidL just hit the nail on the head
These are the vectors where T(v) = v
if you want to "be more general" (?) you can say eigenfunction, with eigenvalue 1
No I literally mean say y=x^2 is an invariant curve of the matrix transformation (-1, 0),(0,1)
We ofc have infinitely many solutions but I was simply wondering whether there are any similar things for other 2x2 matrix transformations
I think you may mean the vectors (x, x²) for some x?
This transformation is R² → R², correct?
I think he wants like L2 or smth
Yeah
Because there are spaces of quadratics, but you'd need a 3×3 matrix
I don't think he means like polynomial basis
I think he means from function space to function space
where he applies some operator
and the function remains unchanged
but like, these are just statements (?), I don't understand what his question is
But then that's infinite dimensional. Even worse, you'd need to be explicit about a basis
"can I explain this without eigen-shits" not well
it seems like you don't really know what you're looking for (?)
I would not try to explain this to other people, especially at a very reductive level
I probably don't have enough background to cover this well either. I haven't taken functional yet
@half ice he doesn't mean vector space
but yes, I agree
he needs to specify many things before he can get any kind of meaningful response
@minor galleon care to clarify?

In mathematics, an eigenfunction of a linear operator D defined on some function space is any non-zero function f in that space that, when acted upon by D, is only multiplied by some scaling factor called an eigenvalue. As an equation, this condition can be written as
...
this is what you're looking for
I do think you mean R² → R², since you have a 2D matrix. all eigenvectors form a subspace, which in this case implies one of the following:
- They don't exist
- They are a line through the origin
- They are the entire plane (think of "do nothing")
I think they are just inconsistent enough that we can both be right XD
Nothing wrong with more info
I'm talking about the eigenfunctions of some linear operator (i.e. matrix) on some function space
but they specified 2D cartesian matrix, so ???
that implies what you said
i have 3 vectors that create a subspace of R4, how do i calculate its dimension?
cram the vectors into a matrix, row reduce, count the pivots
the matrix is irregular
what do you mean by irregular
i mean i can row reduce but at least one of the vectors is linearly dependent
you mean the set of vectors is LD
so the subspace dim < 3
cram the vectors into a matrix, row reduce, count the pivots
the dimension is just the number of vectors in the basis right
may i ask why its not 3 but < 3?
cause its dependent
o
so itll ❤
dim of subpsace=minimum number of lin indep vectors from that subspace needed to form a basis for that subspace
its not possible for 3 vectors in R4 to create a 3d subspace is it?
why do you say that
ok maybe this is specific to my example but when you row reduce the last row will always be 0 in a 4x3 matrix no?
think outside row reducing
the dim of the subspace is 3 if the set of those vectors is LI. consider the span of a single vector, then an LI set of 2 vecs, then an LI set of 3 vecs
 im having a hard time imaginging all this stuff
im having a hard time imaginging all this stuff
3b1b's LA series has nice visuals
right
@half ice Thank you
Btw, could someone explain what's going on with the dot operator thing here
@gray dust but even so, theres no way 3 vectors with each 4 elements can be linearly independent, no?

As an easy example, pick any 3 of the R^4 standard basis vectors
@brittle orchid this is called a Cayley Table and it's a generalization of multiplication tables from elementary school . Which entry is bothering you
the alpha and alpha+1
Have you seen finite groups before
I think not
So in this context
This is like a set of 4 "numbers"
That you can multiply and add to get other "numbers"
So alpha and alpha +1 are two of those elements
This table is tellung you precisely what dot does
what's the relationship between each row, column and entry
(a+1).(a)=1
It's telling you how dot is defined
Because there are only 4 elements
You only need 16 boxes to tell you what dot does
Right
So it's not a standard operator so to speak?
The table describes the dot instead of the dot describing the table?
Unless you have another description of dot from somewhere else
Btw what's the difference between F subscript n and F superscript
Sorry for spam but I'm just showing you what I've come across so far
I mean the way it is described it acs as the modulo operator doesn't it?
Sure
and if that's the case for integers n >= 2, then why isn't that the case for F4?
So basically what you're discovering is
Fp is isomorphic to Z/pZ
That symbol means Integers modulo p
P is prime
isomorphic? xD
Please don't take anything for granted, assume I'm an absolute idiot 😄
ah ok
Two fields are isomorphic if they're "basically the same"
ah ok
So um, I was given a homework sheet with 4 vectors in F4, and I had to decide whether or not they're linearly independent when the field = rational.
I did that by reducing to RRE form and showing that all lambda values = 0
But I kinda don't get where any of this is going
I mean I get how to reduce to RRE but I have no idea why I'm doing so, nor what it really means for something to be linear independent, linear dependent or even linear
and I've especially got no clue of how to determine whether or not something is linearly dependent when F = F5
Since I'm conceptually really shaky
lambda values? is that the same as eigenvalues?
the way i understood it is that if 2 vectors are linearly dependent then one is a scalar multiple of another
wait so the vector space is F_4 and the scalar field is Q?
those are scalars
there are two equivalent ways to think about linear independence
at least 2
one is that the only solution to
$\lambda_1 v_1 + \cdots \lambda_m v_m = 0$
gfauxpas:
yup, I proved that all the scalars are zero
a set {v1,v2,...,vm} is l.i. if and only if no vector is a linear combination of the other vectors
so for example, this set is not linearly indepdent. give me a sec while I write it
$\left{ { \begin{bmatrix} 1 & 2 & 0 \end{bmatrix}, \begin{bmatrix} -1 & -1 & 1 \end{bmatrix}, \begin{bmatrix} -1 & 0 & -2 \end{bmatrix} } \right}$
pretend they're columns
yea
if you notice, the first one minus two of the second one is the third one
yup
gfauxpas:
so the set isn't linearly independent
if I call those vectors x1, x2, x3
then the only scalars c1 x1 + c2x2 + c3x3 = 0 are c1=c2=c3=0
the two things I said are equivalent
I don't understand what this has to do with the LI: if you notice, the first one minus two of the second one is the third one

really
what hes trying to say is that the 3rd vector is a disguised 1st vector (?)
yeah the entry of v3 is 2, not minus 2
my bad
typo
third entry
the third vector can be written in terms of the first two vectors
yea
so its a linear combination of the other 2
oh that's what it means to be a linear combination of something else?
the linear combination is the set of all vectors you can reach by scaling a set of vectors i think
yes, you can write it in terms of the other ones with scalar coefficients, uniquely
aka the span
ngl I feel so dumb right now, like when you're introduced to the atomic model for the first time and you're studying this stuff but have no idea why or what it actually means
the span is the set of ALL linear combinations
ie you have no tangible concept of it
oh oops
linear combination means a (finite) sum with scalar coefficients
So, what exactly does $F_5$ mean and what does $F^5$ mean
WhiteBerry:
I see above they're giving you Cayley tables to describe fields. I understand why you're confused, these normally are explained in a seperate course. To note, the things in a Cayley table are not vectors
I feel like the subscript and superscript are used interchangably (they're obviously not) but I can't find anything explicit in the notes for all of the actual notation and terminology
yeah im kind of surprised theyre showing it to you in linear algebra
F5 is the field of 5 elements. That is, this is 5 "things" on which you can define addition, subtraction, multiplication, and division
is that sub or super
$F^5$ often means $F \times F \times F \times F \times F$
gfauxpas:
This structure happens to be unique. There is exactly one field of 5 elements
So when they say: Consider the following vectors in $F^4$
up to isomorphism, I briefly explained to him before Kaynex
WhiteBerry:
$F_4, F^4$, or ${F_4}^4$?
gfauxpas:
WhiteBerry:
do they say what F is
May I just show you the question?
sure
"When F = Q"
"When F = F5"
Replace F with those, when proceeding
F⁴ means the vectors from the field F that contain 4 entries
in other words, FxFxFxF
So part A is asking if the vectors are LI over Q⁴
Oh I see
This is pretty technical for a lin alg course, congrats if you're keeping up
I only started attending lectures last week smh
😂 😂
Literally haven't handed in a single piece of homework
So now I'm grinding to catch up lol
Anyway so in the case F = F5
what does that even mean like if you're to try and understand the meaning of it
For a very simple explanation, F5 is the integers mod 5
Sorry for dumb questions and I sincerely greatly appreciate your patience ^
So for example 3 + 4 = 2
yea
Or 2×3 = 1
yea
and then use that linear independence of the vectors holds iff linear indepdence of the reduced row echelon form holds
iff means if and only if
What does the matrix look like and why? 😅
matrix looks like the column vectors glued together side by side
I mean for F5 what would the matrix look like
how many vectors are you given and what's F
4 vectors
5 rational numbers in each one?
in F^4
Same thing, the only thing that will change is how you reduce
as to why it works
think about the sort of things you do when you row reduce
if, say, the vectors were related by
v1 = 2v2 - v3
and you replace v3 with 2v3
then v1 = 2v2 -1/2(2v3)
Right
doesnt change the fact that they're not independent
certainly switching the order of the variables doesnt matter either
I didn't mean why does RRE work
I meant why are we trying to solve this system of eqns
because you want to know if the vectors are linearly independent, so you're trying to turn the matrix into something where the answer is obvious
Ahh
if you get $\begin{bmatrix} 3 & 1 & 0 \ 1 & \frac{1}{3} & 0 \end{bmatrix}$
gfauxpas:
well then you can stop
because obviously the second vector is 1/3 the first plus the last
so you dont even need to finish row reducing if you see that one is the linear combination of the others if all you're asked to do is show independence or dependence
I see
but if you completely row reduce it should be even more obvious whether theyre independent
yeah
so when the scalars are = 0 the vectors are linearly independent?
else they can be expressed as a linear combination of..?
yeah
then and only then v1, v2, ..., vn are linearly independent
it's worth thinking about why rather than just me telling you
np
about why those two ways to describe lin.ind. are equivalent
I think I should read a bit of a book for a change
khan academy is good but he deals pretty much only with R^n rather than things like Q^n
but R^n and Q^n behave similarly
anyone good in derivative, graphs and things like that in an early uni level ? 🙂

So, I got f(x)= -2x^4+4x^3+10
With the question, Find the derivates Largest point
(English is not my first language as i am studying and trying to translate from swedish)
I used graphs, i derivated it and i got the largest point to be a point in (1,4)
BUT I am not sure how to get to this point and prove that the point is (1,4) on paper
without a graph
w/o a graph, you'd just differenciate the function, set the derivative = 0 if you're looking for maximum/minimum points
W/o a graph its -8x^3 + 12x^2 = 0
Isnt it ?
because -8x^3+12x^2 is the second derivate
first derivate*
Yeah, then solve for x.
How'd you do that, can I see the working?
sec
But more or less I had -2x^4 + 4x^3+10, I derivated this into -8x^3+12x^2
I put the -8x^3+12x^2 into the mathway and put it into graph mode, this gave me 5 points
X,Y
-1,20
0.0
1/2, 2
1,4
2,-16
Oh.
the biggest point was 1,4
The question is to fine the derivatives' highest point, I get it.
yes
That means to find the maximum/minimum points of the derivative function.
So what you have to do is take the derivative again, set it to 0, then solve for x.
yeah, sorry my english isnt to good when it comes to translating school stuff
So i get f''(x)=-24x^2+12x
0,1**
why is this in linear algebra?
so i have a transformation from R2 to R3
when it asks me to show the map as x |--> Ax, then it wants me to find the matrix i need to multiply the initial matrix with?
Why are these two equations referred to as separate things?
Aren't both equations saying the exac same thing?
the x are unknown scalars while a1, ... an are in the field K
at least thats how i would read it 
First one is with constant coefficients, second one with variable coefficients
when it asks me to show the map as x |--> Ax, then it wants me to find the matrix i need to multiply the initial matrix with?
am i just being a dumbass about this
Could someone explain how they went from 3+6i+4i+8i^2 to that next step?
yami:
Thank you 🙂
@ @wintry steppe context?
linear transformation
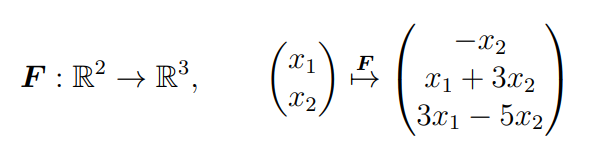
asking me whether F can be shown as x |--> Ax and if yes, to determine A
Oh, yeah, find the matrix M such that F(x)=Mx
Or A whatever
Or A whatever
Linear functions can be written in terms of matrices so if F is linear then it can be written as a 3x2 matrix
Linear functions can be written in terms of matrices so if F is linear then it can be written as a 3x2 matrix
f is linear

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
the kind of transformation where they dont get multiplied with each other is generally linear no?
what do you mean by that?
If each entry is a linear combination in the variables
that one is trivially linear
it doesn't make a difference if you write that as matrix or directly
F(x,y) =(sinx,siny) is not linear
??
why is the text red
yeah tahts what i meant @vast torrent
So the key is that to create a matrix for a linear transformation you only need to know how it acts on a basis
Do you see why?
no
It's not necessary to write linear functions in matrix form
That's the assignment mophra
Standard
But im explaining a concept
If a vector v in terms of a basis e1,e2,
..,em is
v=c1e1+...+cmen
Then T(v)= c1T(e1)+...+cmT(em)
See?
yeah thats one of the requirements for the transformation to be linear
this may look better bashed out in latex, fauxpas
or at least looks like it
But do you see how T(v) is wholly determined by how it acts on e1,e2,..,em
yeah
Im on mobile, it's annoying to use latex
it really is
Anyway, can you write c1Te1+...+cmTem in terms of a matrix multiplied on a vector [c1,...,cm]?
$v=c_1e_1+...+c_me_m\\$if transformation $T$ is linear, $T(v)=c_1T(e_1)+...+c_mT(e_m)$
RokettoJanpu:
$v=c_1e_1+...+c_me_m\\\\$if transformation $T$ is linear, $T(v)=c_1T(e_1)+...+c_mT(e_m)$
That's the matrix you want
$T(v)=c_1T(e_1)+...+c_mT(e_m)=M[c_1 $ \cdots & c_m]^\top$
oh my, i'm sorry you had to do that on mobile
gfauxpas:
Compile Error! Click the reaction for details. (You may edit your message)
oh transposed?
hmm idk the matrix looks like an arbitrary m x n in my head
Someone on pc write that as a column vector to not be confusing
np i get it
Tia
$T(v)=c_1T(e_1)+...+c_mT(e_m)=M\begin{pmatrix}c_1\\vdots\c_m\end{pmatrix}$
RokettoJanpu:
$T(v)=c_1T(e_1)+...+c_mT(e_m)=M\begin{pmatrix}c_1\\\vdots\\c_m\end{pmatrix}$
Think of the row.column or column.row interpretation of mtx multiplication
And think of each T(ei) as columns
Bbl
Think of the row.column or column.row interpretation of mtx multiplication
not sure what you mean by this, are you talking about how the rows and columns interact with each other when multiplied?
The goal is to write the linear transform as just left-multiplication of the input by some matrix
yeah so like some M x (x1, x2)
Aye
and in order to find M i have to find out how T(x) behaves on a basis
Seems like you get the strategy. What's the question?

Khan Academy
Showing how ANY linear transformation can be represented as a matrix vector product
have 18 minutes?
sure
Okay, what's F(1,0)?
watch the video I linked to, he explains it
-1
needs to be a 3-tuple
Remember, F takes in vectors from R² and returns vectors from R³
so -1,0,0 then?
seems wrong
oh lmao
$ \begin{bmatrix}
0 & -1 \
1 & 3 \
3 & -5
\end{bmatrix}
\begin{bmatrix}
x_1 \
x_2
\end{bmatrix} $
yami:
this is actually pretty cool
so i understand how to compute the kernel but im not sure where it goes wrong 
take the matrix above, put it into RREF and then x1 = x2 = 0?
It's possible for the kernel to be {0}
In fact, there's a very important theorem
Know what an injective function is? Also called a one-to-one function
yeah
If T is a linear function