#linear-algebra
2 messages · Page 44 of 1
Actually useless
non-trivial is always mentioned when theres one which works "always"
Right
reminds me of linear combinations
0 is always in a subspace, so the intersection of two subspaces will always have 0
ah
So non-trivial just means, not just 0
omg i don't even know wtf i'm proving
holy shit
this is most likely wrong as hell, but that's what i got so far
wait nvm i have an idea
V and W are linear transformations?
Yeah that's pretty wrong
It should help you to think of actual examples
Nah it's more strong
Think of the R^2 example
Figure out an example in R^3 and see how that works
i got an idea, i just represent vectors u and w by some linear combination of vectors, and then when I add them together, show that some vector v is also a linear combination of the linear combination of v and w
thus showing that B U C is a basis for V
Try it
in what topic does construction of natural numbers etc fit in the best?
got a question on that
ok so i have to prove this corollary now, but i have one question
ty
If V is the direct sum of U and W, then dim(V) = dim(U) + dim(W)
what happens if there is some identical vector in B and C, where B is the basis of U, and C is the basis of W
oh wait
nvm
that would violate the direct sum
nvm
im retarded
`Let U and W be subspaces of V. Then U + W is the subspace of V defined by
U + W = {u + w | u is in U, and w is in W}`
this is basically direct sum
but a little different
i think
How so?
oh this is a different question
this says nothing about uniqueness
given that definition
Prove this
`Let U and W be subspaces of V. Then V is the DIRECT SUM U and W if and only if
(a) V = U + W
(b) U intersect W = {0}`
ok yea this is kinda obvious, but idk how to prove this without being vague af
to find basis
after u do that
u know how to setup basis
which shows the subspace for R^3
yeah
so the idea of basis jsut says
we can create the vector space R^3 (or R^n) with only a minimal amount of vectors
for example the basis of R^3 is {[1,0,0], [0,1,0], [0,0,1]}
because with ONLY those three vectors
we can create any other vector in the vector space R^3
oh
is to set up a basis for that given set
so in my case, a would be the only vector needed to create the vector space R^3?
there can be infinite basis
so ur question says let W be the set [a,b,c] where a - 3b - c = 0
thats a little hard to comprehend
so lets redefine it
let W be the set of vectors [a,b,c] where a = 3b + c
now we know that we can create this subspace with this given condition
as long as a = 3b + c
ohhh i see what i was confused on earlier now
but wait
im sstill lost on why solving for b and c dont matter
aight
so we've set
let W be the set of vectors [a,b,c] where a = 3b + c
so in other words
we have to define W to be a subspace of R^3
where a = 3b + c
we can redefine this as
W = {[3b + c, b, c]}
now remember how a basis for R^3 is [1,0,0], [0,1,0] and [0,0,1]
?
was that clear to u
i can give u my book's example
sure
np
why is it true that Ax = v + w will also be consistent?
oh its cause colA is a vector space
when it says "has a solution for each b in R^m" does it mean every vector in R^m or every entry in the vector b for that specific vector?
@north sierra the former
thanks
i have a question
if x = 0
why cant i divide both sides by x
0/x = 0
so 1 = 0
because x = 0 
or d/dx both sides :)
whats the fastest way to find inverses of matrixes 4x4
im currently using the cofactor method
but i have to find 16 3x3 determinants which really can take a while in an exam
does a vector space have to be closed under the two operations?
I don't see any closure condition in the axioms
i only read for addition: ass law, com law, neutral element 0 and inverse element and for scalar mult: left dist law, right dist law, ass law and neutral element 1
and yes, it was fun to me to write ass law
so do these imply closure, then?
as concerns what i have read so far no since only neutral and inverse have to be element of the vector space
if you don't have closure, nothing else even makes any sense in the first place.
how can (x+y)+z = x+(y+z) make any sense if you don't know that x+y or y+z are still in your space
+: V×V -> V
*: K×V -> V
but do they have to picture in V?
yes of course they do where else would they map
english words will bring me into nuthouse one day
but why are they limited to map into V? is it a restriction coming from fields?
Isn't that what closure means?
afaik closure means that A x A maps into A
but why are they limited to map into V? is it a restriction coming from fields?
where else could they possibly map into
if you add two vectors and get something that ISN'T, then maybe you aren't dealing with anything resembling a vector space at all
but where is it restricted in the axioms and definitions? thats what i am asking for
how can (x+y)+z = x+(y+z) make any sense if you don't know that x+y or y+z are still in your space
and so how is the vector addition defined? i have no clue since i dont know much about LA
could be defined any way you like as long as it fits the axioms
if you have the characteristic equation (a+1)(a-2)(a-1), do you let the p1 be the matrix for when a = -1, the matrix p2 for when a= 2 etc. in that order?
nnnnnno you're just way off-base
how so
@mint sentinel i call then E-1 and E2 if thats what you mean
to find E-1 i would do:
1)sub a=-1 into the original matrix
2)set the product of that matrix times the general vector equal to 0.
3)create equations
4)solve equations.
5)use those values to create the bases for E-1
6)Make E-1 by adding the bases as column vectors
can you give me an example? all im wondering is that, when im supposed to find a matrix P that diagonalizes a matrix A and get bases p_1,p_2 and p_3 for example for the eigenspaces, what order do i put them in to get the matrix P? or rather, how do i chose which of the bases are either p_1, p_2 or p_3?
so basically you have to find the bases of E1, E2 and E3
which are the eigenspaces
then you put those bases in one whole matrix
thats your matrix P
(or at least i think so, i was taught eigenspaces 2 days ago)
yes, as a matrix of column vectors right?
yes
yes, but if i get a vector E1, why not call it E2 and make the original vector E2 as E1? how do you know the order?
E1 is the eigenspace
the vector is the base of the eigenspace
order doesnt matter
i think at lwast
I just started on this topic so i may be wrong
alright, thx tho
@mint sentinel there's no "right" order for eigenvectors
if the choices of the matrix of the basis vectors give determinant +1 or -1, we generally prefer an order that gives +1
if the eigenvalues are all real, we often prefer them to be in ascending or descending order
but there's no "correct" order
@lone quail
okay, thanks
Do i need any pre knowledge besides high school math to learn linear algebra?
Nope
thats great
U have to be able to think abstractly tho
Things get challenging when ur introduced to vector spaces in third dimension
Love u too
xd
i mean im really interested in linear algebra and im not a math student so its great for me if i dont need pre knowledge
but i've got my lemme call it "semi-A level" so abstract thinking should be possible 😄
If ur interested in it and that means you wont give up at the first challenge then ull do fine
Try ur hardest and ask questions
Ull succeed
i dont have abstract thinking
cuz i havnt done math in 10 years
and i jumped into a engineer class
well i already constructed the natural and integer numbers
and i think thats quite hard if you havent done such an axiomatic construction before
AND YES IM HAPPY THAT IM ABLE TO CALCULATE THREE PLUS FOUR
and yes thats not linear algebra i think but kinda set theory if im not wrong?
on a german video about vector spaces, first comment: "vector spaces should burn in hell" 😄
hello
Sup
which topic does stuff like equivalence transformations belong to? algebra i guess? but linear algebra as well?
hi i need to multiply two matrices, B and A to get BA
B =
[ 1 0 ]
[ 0 1 ]
[ -1 -1 ]
A =
[ -3 2 -1 ]
[ 0 1 1 ]
I managed to do AB, but BA is confusing because idk what to do when I reach the 3rd element of the first row of matrix A
Can someone help with this?
For BA
U have to make three copies of B
That are multiplied by each column of A
Respectively
what do you want to see?
ok so first:
(1x-3)+(1x0) .... (0x2)+(0x1) ... then what do i multiply the last column of A by?
Its hard for me to type on my phone but if u give me 10 mins
I can write it out for u
So for example the first column of BA is
The entirety of B multiplied by the the column of A
why is that so?
you can use my tex translations then and maybe copy it down
Ok ill write it on paper
dude that's the answer xd
Ill show u the steps
i think the solution wasnt asked but the steps to get there :^)
wait now i'll just try to figure out the steps
ty @prisma kestrel for the tex
if im not wrong, matrix multiplication, it means you multiply col from first by row from second matrix
yeah
so in B*A, m-th col, n-th row it means m-th col from B * n-th row from A
but col of first is 1 short of row of 2nd
can you take a closer pic please?
Open original
zooming is blurry
But yh sec
its row from 1st row matrix by column of the corresponding second matrix
yeah
I mean sure but showing ur work proves u understand it on exam
if you understood you can do it in your head but if you havent understood it yet the steps are important 😉
i don't understand why you are multiplying the whole of matrix B by each column
what's the difference between a vector and a matrix?
true marino i dont really understand the steps lol
A vector is a list of numbers
set != array
Yh sorry disregard what i previiusly said about matrix
@@vast torrent ok thanks
I was watching threeblue1brown
Home page: https://www.3blue1brown.com/ How do you translate back and forth between coordinate systems that use different basis vectors? Full series: http://...
What is it doing at minute11?
How does it work?
did you get it x14dev
i still don't understand tbh why we multiplied the whole of B each time
no
did you get to your solution in the same way? @north sierra
ok
@dusky epoch whats an array in math for you?
ok not really the steps but do you see whats happening ? @wintry steppe
one sec
i made an error
Does ur textbook teach that?
im not sure
ok that should be good
so i take the first row of the first matrix and multiply it by the first column of the second matrix
then first row of the first matrix by the second column of the second matrix
then first row of the first matrix by the third column of the third matrix
(first row,first column) corresponds to (1,1) so you put the sum in (1,1)
(first row, second column) corresponds to (1,2) so you put the sum in (1,2) etc..
oh then i confused it, i thought it was col * row but its row * col oO
Its the same thing just without showing the steps
can someone please help me understand what the L_A matrix is?
aha it makes sense now, so the entire row by each column
yeah
????????? Its literally the same thing
How does his make more sense
??????:monkaS-1:
i dont know
I don't understand why this isn't getting through my head, it seems like it should be real simple
this way is more intuitive for me
i have no idea how you got those smaller 1 column matrices
in the last step
@clever cedar
sorry not you
kk
thanks for the explanation too @north sierra
np
next time i will check the textbook too (i completely forgot to check it) uh
that sign stands for an empty set, which contains no elements
but besides that idk
just a function from $\emp^2$ to $\emp$
CaptainLightning:
although $\emp^2=\emp$ so this is actually just the empty function
CaptainLightning:
on the empty set
which if you consider its relation to be the function itself
is also the empty set
Can you have null×null?
yes
Is that just the empty set?
yes
yeah but
a map from A -> B means i can input elements from A and i get elements from B
but the empty set has literally no single element
so what should i input
and in reverse what should be the output???
Look at the set theoretic definition of a function
that's not a definition
and i dont know where to find a definition
so that was my trial to find something in wiki 😄
It's the empty function. There's no mappings

In mathematics, a function is a relation between sets that associates to every element of a first set exactly one element of the second set. Typical examples are functions from integers to integers or from the real numbers to real numbers.
Functions were originally the ideali...
One could think of a function A → B as the set of arrows starting at an element in A and ending at an element in B.
"No arrows at all" also counts as a function by this def
so this might be the definition
or rather that both criteria need to be fulfilled for a relation to be a function
That second picture is a relation between sets X and Y
Functions are just a special type of relation
yeah sure
left total and right unique if these are the english words idk
already heard about it 30 min ago 😄
but okay
so i first thought the 2nd condition isnt fulfilled
because for any given element from X (lets imagine X -> Y) there is no element in Y to be part of the relation
but okay there are no elements in X so the condition is still satisfied
There exists the empty function on A → empty as well
and the top one is always fulfilled because the lhs of the implications always yields false (because there doesnt exist any tuple)
X -> Y is our empty -> empty
A -> empty?
wait
but the bottom one says
for every a there has to exist min 1 y
but there exists no y
because y is element of empty
Oh true, mb there is no empty function on that
THANKS GOD
There's an empty relation though
A relation between A and B is a subset of A×B. The empty set always counts
It's a set of arrows between A to B with no rules on the arrows
you mean that if R = subset of A x B and R = empty?
Ya ya
There could just be no arrows between A to B, that's an empty relation
with arrows you probably mean that if (x; y) is element of R, then x points an arrow to y
You know, I don't know why I'm explaining this, you likely know these definitions oop
oop?
That's not a math thing just an expression I have
thanks god
what was the half group again? only associative?
collecting the stuff i learned in onenote so i wanted to summarize it if i once forgot it 😄
interesting...
so we could build a group of integers but only a monoid of natural numbers
understood that right? 😄
There's a semigroup, which only needs associativity
im sry
Closure is always assumed in a binary operator
trying to translate the german words for it
Ah IC
in german its "half group"
I've never used one for anything lol
a semigroup you mean?
Ya ya
well but its interesting how it builds up
so first ass law, then neutral, then inverse
no wait
"ass law" lol
You're right, you need an identity before an inverse
identity?
well neutral element sounds better to me as well
well the identity map is $x \mapsto x$
gfauxpas:
because they're equal, identity implies things are equal
so I guess it's based on that
yeah i guessed the same
so i got a question
if we got a ring (M, +, *)
as concerns what i learned so far a ring has ass law, identity and inverse element for "+" and ass law + dist law of "*" whereas dist law is related to "+"
so a commutative ring restricts * to be commutative
and a unitary ring demands an identity element for *
but what about if we combine commutative and unitary?
does this have a name as well?
commutative ring with unity
so it has no name, just two special properties
are operations in at least semigroups closed?
according to wiki they are, if wrong, just hit me up
is a general ring (R, +, *) commutative with respect to +?
because in my last video i've seen he didnt mention it but wiki tells otherwise
ok all comments say "+" needs to be commutative... 😄
can this (B^T+A)C, be simplified to something other than CB^T + AC ? where B^T is B transposed
matrix?
maybe you should tell what C is
i cannot help you but those who can could be interested in
depends on the laws defined on matrices
distributivity in this case
if there is dist law or not
To show indeed show that $\mathcal{F_{a}}$ is a subspace of $\mathcal{F}$ is it enough say that, $$(f + g)(a) = f_(a) + g_(a) = 0 \in \mathcal{F_{a}}$$ $$a(f(a)) = 0 \in \mathcal{F_{a}} $$ ?
what's $f_0$?
gfauxpas:
oh my bad typo it should be fixed now
Yo if my line goes through (-3,-3) and x=0 how do I find the slope since I want to get a parallel line
you need to check that all conditions are maintained under addition and multiplication by a real
Wat?
Zophike1:
Ahh ok @gray glen
O srry I thought u were talking to me, my bad
Yo if my line goes through (-3,-3) and x=0 how do I find the slope since I want to get a parallel line
@gray glen let me relatex what I wrote
you also can't say either of these things in general
the question is, is this suficient to prove the space is a subspcae
if you know these properties hold for all functions in a subset
you can't say f(a)+g(a)=0 for all a in [0,1]
or that a(f(a))=0 for all a in [0,1]
even for f and g in the subset
they're saying, IF it's true
well it isn't much help to show that it's a subspace if you can't say either of those things for arbitrary elements of it

lightning, for example
@gray glen the first part of the exercise was to show that it's a vector space so that's why i'm trying to show that it's a subspace
I know
Or wait is showing that it's a vector space implies that it's a subspace
a better way of going about it
also what was the original space
go through the 3 step subspace test
nonempty, closed under scalar, closed under addition
the zero mapping is there
so it's not empty
For the Subspace Test wouldn't I have to perform on the elements of my space
lightning, the original space is [0..1] integrable functions
Like perform it on $f, g$ respectively ?
Zophike1:
oh wait, specifically, continuous on [0..1], f(0) = 0, f(1) = 1
No the condition is f(0) = 0, and f(1) = 0 for the context of the question that's why I tried doing f(a) = 0 for all in a
you have to show:
the 0 function is in the space or that it's non empty
that if f, g are in the space then so is the pointwise sum f+g
ahhh ok
and if f is in the space and c is a scalar, the pointwise scaled function cf is in the space
which is why I said you couldn't assume that 
now, what is a
a is some arbutiary constant right ?
So the wise thing to do would be to consider $(f+g)(a) = f(a) + g(a) = (g + f)(a) $
Zophike1:
@vast torrent yes
well you dont need to check f+g=g+f, we know that's how pointwise addition of function works
Oh my bad we would need to check that f(a) + g(a) is closed
Yo if my line goes through (-3,-3) and x=0 how do I find the slope since I want to get a parallel line
Sorry for texting this for the third time it's just no one responded
O srry which one?
@gray glen how would you apply the Subspace Test i'm a bit stuck 😦
well
https://proofwiki.org/wiki/Subspace_of_Real_Continuous_Functions I'm looking at the general proof for some insight
given two elements f,g of the subset
show that their sum f+g has all of the properties necessary to still be in the subset
go through each property in turn
then do similarly for cf for an arbitrary real c
so should I use the sum for continous functions ?
for showing their sum is continuous in particular, you'd want that the sum of two continuous functions is continuous
(this is true)
would you be expected to prove this as well or would you take it as obvious?
it's definitely a very fast proof even if you need to
Can't we take it as obvious as this case or would I have to explain it ?
if you feel like it's obvious then you can probably just say it is
but still point it out
but know I have a clearer idea on proving the second part of the exercise I was a bit confused since a lot of proofs applying the subspace test usually are with involve employing matrices
fair point I'll spend more time playing with functions that form a vector space
Im not even sure you can do a "matrix" with countably many rows and columns for countably infinite spaces, actually . Idk if it's possible
But certainly not uncountably infinite dimensions
can someone help me simplify this in a form where I can solve for C?
@vast torrent Since indeed $f,g$ are continuous functions it's easy to see that $\mathcal{F_{0}}$ is indeed a subspace of $\mathcal{F}$ since one has to establish that $f+g \in \mathcal{F_{0}}$, and $a(f) \in F_{0}$. To show this one can note that
$$\lim_{x \rightarrow c} (f + g) (x) = \lim_{x \rightarrow c} (f(x)) + \lim_{x \rightarrow c}(g(x)) = (f +g) \in \mathcal{F_{0}}$$
as well as that,
$$\lim_{x \rightarrow c}(c(f(x)) = c\lim_{x \rightarrow c}(f(x)) = a(f) \in \mathcal{F_{0}}.$$
Zophike1:
^ I think this should be a good proof It's worded a little awakwardly but it should do the job
on the left you have real numbers and on the right you have functions
it also ends with what you're trying to show stated (unjustified)
it seems like you're avoiding words in the later part and that might be the problem
you want to go like
(proof of property 1 for f+g)
what do these brackets around the vector mean? I've been seeing this a lot recently. The B is a basis for vector space V and x is an element of V
Ahh ok @gray glen
"so we have property 2 for f+g"
until you get all the properties shown
and finally conclude f+g is in the subset
well to start you haven't said anything about (f+g)(c)
ahhh ok
and that's just talking about them being continuous
you said nothing about (f+g)(0) or (f+g)(1)
So I would have to perform the same steps for (f+g)(c) and (f+g)(0) ?
you should say like "for c in [0,1]" blah blah "as f and g are both continuous" blah blah "so as c was an arbitrary element of [0,1] (f+g) is continuous"
stuff to that effect
so was my idea in the corrected solution wrong then ?
I think the general idea was there but the execution was quite off yeah
oh I just didn't state it rigorously ?
I mean the picture I posted is just wrong
ahh all right 😦
oh and also show it's nonempty but that's a small thing
why is the 0 excluded in field's definition for the multiplication group being abelian?
so why for a field (K, +, *) is only (K \ {0}, *) an abelian group
@gray glen I'm clueness at this point on how to show it I get how it forms a vector space and how prove that it forms a vector space but I don't get how to use the subspace test to show it
0 doesn’t have a multiplicative inverse
wouldnt a commutative monoid work either?
I think I know how to show it now give me a minute
But that’s a monoid
well on the one hand we got (K, *) = comm monoid or (K \ {0}, *) = abelian group

no wait
we want the inverse for every element except for 0
🤦♂️
but it bothers me that we totally exclude it
because then we exclude the case where 0 wouldnt fulfill the ass law for example
really theoretically here
well actually
is the 0 excluded because identity element of addition?
or where does the "0" symbol come from
i mean we're talking about a general idea of a field
I’m pretty sure one can show that within any field, any additive neutral element cannot have a multiplicative inverse
The 0 symbol is usually reserved to denote the additive neutral element
but still we talk about any additive neutral element
Also pretty sure it’s unique :p
so not specifically OUR neutral element of addition which has no inverse
By virtue of it being an additive group
what is an additive group? you mean with operation = addition? 😄
Yes
aight
well
but still can we say something about general stuff? where we havent got numbers etc?
A field, by definition is an additive group that’s also a multiplicative monoid
wasnt addition and multiplication abelian in fields?
multiplicative group, once you remove the zero
Addition is almost unanimously deemed to be an abelian operation
I meant commutative
But multiplication is not
well but still in our general definition we only have binary operations which yield no idea of our usual addition etc
Yes you could call them differently
How about this: a field, by definition, is a commutative group that’s also a monoid under another supplied operation
how can a field be a group? a group only has 1 op
Ok, although there’s an addendum: only the neutral element of the commutative operation doesn’t have an inverse under the second mentioned operation
A field, restricted to the relevant operation :p
well actually
@gray glen I coudn't get it in the end I ended up looking up the solution : https://yutsumura.com/subspaces-of-the-vector-space-of-all-real-valued-function-on-the-interval/

Linear algebra problem. Let V be the vector space of all real valued functions on the interval [0,1]. We prove or disprove given subsets of V are subspaces.
if i think about it correctly
actually its all just definition
which can be thought of as good or bad
and i think its imprecise
but in the end only K\{0} needs to fulfill the abelian stuff
uh those are slightly different sets
@gray glen the set for part (a) would be right for my quesiton
oh fair point but what was done in the solution for part (a) could work for the question i'm dealing with right ?
@gray glen but I think I see how to solve my question know 🙂 sorry for being stupid 😢
That is a fair point but I get angry at myself for not being able to come up with things on my own
That comes with time
I know
Math is too big to reinvent
@gray glen here's my final solution
$\text{Proof}$
To show that $\mathcal{F_{0}}$ is indeed a subspace of $\mathcal{F}$ we first must define that,
$$\mathcal{F_{0}} = \big{ f \in C[0,1] , \big| f(0)=0, f(1) = 0 \big}.$$
Then we consider the addition $(f+g)(x)$ it's indeed easy to see that,
$$(f + g)(0) = f(0) + g(0) = 0 \in \mathcal{F_{0}}$$
$$(f + g)(1) = f(1) + g(1) = 0 \in \mathcal{F_{0}}$$
Thus it follows that $(f+g)(x) \in \mathcal{F_{0}} $
Since $f \in \mathcal{F_{0}}$ we have that $f(0) = f(1)$ the scalar multiple $(cf)(x)$ satisfies
$$(cf)(0) = c \cdot f(0) = c \cdot f(1) = (cf)(0)$$
Thus $(cf)(x) \in \mathcal{F_{0}}$
Zophike1:
oh my bad
0 real number vs 0 function
(f+g) isn't necessarily the zero function
what you've done is show that (f+g)(0)=(f+g)(1)=0
which is good because that's one of the things necessary for f+g to be in the subset
but it isn't everything necessary for f+g to be in the subset
you still need that f+g is continuous
I thought that for f+g to be in the subset it had to satisfy all the things within the subspace test
ahh ok to fix the proof should I just state that f,g are continous respectively
and that this makes f+g continuous
make sure you don't get confused between the function f+g and the image of a certain point a under f+g
which is (f+g)(a)
But wait I apologize for the dumb question but didn't I already define that f is indeed continuous earlier in the proof, by setting $\mathcal{F_{0}} = \big{ f \in C[0,1] , \big| f(0)=0, f(1) = 0 \big}.$ ?
Zophike1:
f is continuous and g is continuous
but you have to say something about f+g being continuous
ooooh ok now I understand the issue
So I have to also employ the property that it is continuous as well
you have to say that it's continuous and why it's continuous yeah
To show that $\mathcal{F_{0}}$ is indeed a subspace of $\mathcal{F}$ we first must define that,
$$\mathcal{F_{0}} = \big{ f \in C[0,1] , \big| f(0)=0, f(1) = 0 \big}.$$
Then we consider the addition $(f+g)(x)$ which produces a continuous function since,
$$D_{x}(f + g)(0) = D_{x}(f(0)) + D_{x}(g(0)) = D_{x}((f+g)(0))$$
$$D_{x}((f + g)(1)) = D_{x}(f(1) + g(1)) = D_{x}((f+g)(1))$$
Thus it follows that $(f+g) \in C^{(1)}(0, 1)$ and $C^{(1)}(0, 1)$ is closed under addition.
Since $f \in \mathcal{F_{0}}$ we have that $f(0) = f(1)$ the scalar multiple $(cf)(x)$ satisfies
$$D_{x}(cf)(0) = c \cdot D_{x}f(0) = c \cdot D_{x}f(1) = D_{x}((cf)(0))$$
Thus, $(af) \in C^{1}(0,1)$ and so $C^{1}(0,1)$ is closed under scalar multiplication.
Zophike1:
Yeah is that a misstep on my part ?
$\frac{d}{dx}$
Zophike1:
How are you diff'ing if we don't know tje functions are differentiable
But aren't continuous functions differentiable
No, differentiable functions are continuous
ahh okay my bad
Consider |sin x|
fair point now i'm confused how do I show that $f+g$ is continous
Zophike1:
Continuous but not diffavle where sin x changes sign
Well there's more than one definition of continuous, which do you know?
that would work
write f(x+h)+g(x+h) = (f+g)(x+h) for |h| small and non zero
for epsilon != 0
maybe h would be better than epsilon because usually we use epsilon>0
changing it
there
note, however, that your work would be useful when analyzing the vector space of differentiable functions
something is still bothering me about this though
you say f(a) + g(a) = 0 in your space?
for every a?
$$\mathcal{F_{0}} = \big{ f \in C[0,1] , \big| f(0)=0, f(1) = 0 \big}.$$
Zophike1:
Sorry posted the wrong thing eariler
yes but does that mean f(1/2)+g(1/2)=0 for all f, g in C[0,1]?
yes
well that's a bizarre set
Unless I'm misunderstanding the set
post the origina,l problem again
that doesnt say that f(a) +g(a) = 0
oh shoot your right I must have misread the problem then
yeah, the problem is just to show this is a vector space
${ f \in C^0([0..1]): f(0) = f(1) = 0}$
gfauxpas:
ahhh okay I see where I got confused now 😦
so you need to prove two things
that it's closed under vector operations for continuity
and that the f(0)=f(1)=0 thing stays true for the vector operations
I get how to show how it's closed but I don't get how to show that f(0) = f(1) = 0
oh ok
or just check (cf+g) in one step
So to check $(f+g)$ I would just take that $$\lim_{h \rightarrow 0} (f(x+h) + g(x+h)) = f(0) + g(0) = f(1) + g(1) = 0 $$
Zophike1:
to conclude that indeed $(f+g)(x) \in \mathcal{F_{0}}$
Zophike1:
You need to check closure under continuity seperately from checking closure under the boundary conditions
They're two different creatures
ahhh ok I thought you wanted me to do it all at once
No, you can't
Or shouldn't
but instead of checking f+g and cf seperately you can check cf+g
Crossed it out bc people usually don't use that shortcut, at least not when you're taking your first la class
That's fair i'm just trying to piece together the proof at this point I get some of the idea's but I can't put togther the bigger picture
Do you know what it means for a set to be closed under some operation?
yeah when you add members of the set it produces members of the same set
"add" or perform whatever operation being considered
In linear algebra, the two operations you need to check for closure
Are addition, and multiplication by a scalar
So I should do $(f + g)(x) = f(0) + g(0) = f(1) + g(1) = 0 $
Zophike1:
Your set has two defining properties
Continuity and the bdry conditions
You need to check that both those things are closed under addition and scalar multiplication
ahhh ok by boundary conditions you mean f(0) = f(1) = 0 ?
At this point can I just see the proof ? I've been stuck on this for hours now
You're close
Do 4 things
Prove f+g is continuous
Prove cf is continuous
Prove (f+g)(0)=(f+g)(1)=0
Prove (cf)(0)=(cf)(1)=0
To prove a function is continuous, use this definition
$\lim_{h\to0}f(x+h)=f(x)$
gfauxpas:
Go forth young man
To prove the first point I noted that $(f+g)(0) = f(0) + g(0) = f(1) + g(1) = (f+g)(1)$
Zophike1:
^ Is this fine ?
Add =0
all right thanks
Woah I got it thanks man @vast torrent 🙂 I see the proof and I get how and why it works
Also what was the shortcut you mentioned I shouldn't use ?
does anyone know if the cauchy swartz inequality holds for the cross product
for 9, why is is that i can just make the equations = 0 and then that makes it a vector space?
are u familiar with subspace test
ya
pretty much he's summarizing that the subspace given satisfies the subspace test
since u can make those vectors into a zero vector with being a suspace of R^n
as well as its closed under addition and under scalar multiplication
but he doesnt show the addition and scalar multi part
slader is also student provided solutions so my guess is he didnt go into depth
but i could be wrong
Oh I see. He noticed that it is a null space of some matrix, which is a vector space
Dumb question does a Cone form a vector space ?
Not a bad idea
can you explain kaynex?
The null space of any matrix is a vector space.
how did he know it was Nul space
Rearranged it so it was
Can you see the similarity between the matrix and the equations in the solution?
ya
they’re the coefficients of the equations
but how does he know without row reducing
that theres a set of solutions to Ax=0
Remember that the null space is the set of vectors that, when put through the matrix, gives 0
ya
We also have that a - 2b - 4c = 0, 2a - c - 3d = 0
What happens if we put [a,b,c,d] through that matrix?
it should equal 0?
Ya ya. You'll get the zero vector. So [a,b,c,d] is in the nullspace of that matrix
I'm struggling with the last part of this question i'm having trouble seeing that a cone is not vector space. I'm I missing something here because if it's closed under addition and mutiplication shoudn't the cone be a subspace or R^{3}. I'm I missing something here !!?
Here's a cheat, it's not a vector space if there's a constant in the equations. 7 and 8 are not.
@dreamy depot instead of testing f+g and cf in two steps you can test cf+g
@vast torrent for the problem i'm facing or the shortcut I was asking about for the last problem
For testing closure under vector operations
Like if i have a map T and i want to see if its linear
I check T[x+y]=Tx+Ty
And T[cx]=cTx
ahhh ok I see
But the shortcut is to check T[cx+y]=cTx+Ty
"multiplication by positive numbers"
There's other scalars that break this
What happens if your scalar is -1?
ahhh I see so I would just have to throw some negative numbers at it
@half ice when you do multiply -\alpha (a) you would get atributary scales outside our side
so therefore $C$ cannot indeed be a vector space since the axiom closed under scalar multiplication is not satisfied
Zophike1:
@half ice ^ is this a good rigorous answer
Sweet thanks man 🙂
can anyone help me understand how they calculated cos for this
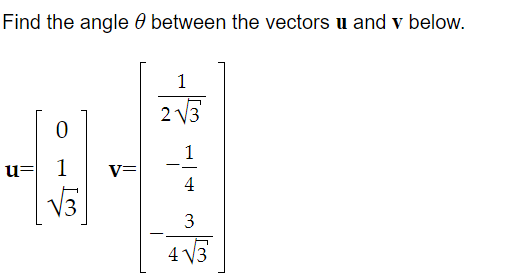
Dot product u*v makes it = to -1
and they use this formula

to get -sqrt3/2
u*v = -1
is the absolute value u*v = 1?
the bottom is magnitude u * magnitude v
its a dot product property
u * v = ||u||||v||cosx @carmine terrace
u * v = |u||v|cosx
the bars should be double but discord sees that as a spoiler tag
its length of the vector
and * is dot product in this case
$\cdot$
mike0x81:
Thank you Mike, that's a good explanation.
anytime
Let V be a finite-dimensional vector space. Let U and W be subspaces of V with dim(U) + dim(W) = dim(V).
The following are equivalent
V is the direct sum of U and W
V = U + W
U intersect W is the 0 vector
any hints
just want some sort of direction
dunno how to start this off
np
consider what dimension means in terms of its representation as a subspace
for example
if i say the set V has a dimension of 4
what vector space is it in
no i know that, i just need some hints on how i should start this proof
whether its easier to start proving statement 1, or statement 3
kind of thing
Hey guys I'm having problems with this problem

{kind=link}
{kind=link}
{kind=link}
How do i find L2?
For L1 I got
x = -3+-3t
y = 3+-3t
z = -1 + -t
but I'm not sure how to proceed for L2
I think this is L2
x= -18+-6s
y= 3+4s
z= 0 + 2s
then I just make em = to each other since they instersect
kk thanks kaynex i get it
@carmine terrace you're suppose to use substution
so like for instance
you take one of the X's
and the other one isolate for T
then plug in the second one into the first one
then you should get a value for X
where if plugged into both equations satisfies
same thing for Y and Z,
if i have 2 points in a plane. i know their points. (green points)
i have a 3rd point (blue) ALSO in the plane, i am trying to solve for.
i know the distance between each of the points. (3 lengths of a triangle given)
i have the equation for the plane (in picture top left)
how to go about solving the 3rd point?
i understand it will probably have 2 solutions. (cuz we could flip the triangle across the line formed by 2 green pts)
the blue point we want must satisfy the equation for plane
interesting problem
let me think
wait
u know the distance between green points and blue point right?
why cant u just
solve for the vector equation
where a green point would be position vector
and direction vector would be distance
i guess i havent covered direction vectors. or to say idk how to find vector that connects the blue dot to green
i see
would u mind giving me full problem?
or is that all of it
with the givens
actyually i think i know what ur onto
the full problem is actualy something that preceded this. and i was trying to solve it usng this method
full problem something else 1 sec
ok
this is a simpler problem
i wish u presented to me this first
i could explain u it
find the point on the plane closest to the point given
ok
first what we want to do is find an arbitrary point on the plane
in order to do that
right i know this part
we find [x,y,z] that satisfies the equation of the plane
ok
next
we want to find the vector from that point
to the point outside the plane
right, red line on my picture
now
er not red line
we want to project that vector onto the normal vector
right
with that, we now know the distance from the point outside the plane
to a point on the plane
(shortest distance)
yes
lastly
take the point outside the plane
and subtract it by the projected vector
and we get the point on the plane
lol...
"take the point outside the plane
and subtract it by the projected vector
and we get the point on the plane" this is too easy lol
i wish this popped immediately into my head.
im still working my head around vector addition, subtraction, how it all works. and i havent thought deep about it
lol
even tho i know its one of the easier subjects of linear algebra
its crazy how abstract ideas can be solved with simple subtraction
i understand
hope that helped
lolol dw
btw i was uisng the pythagorean theorm, everything you dud there
but then i went off into some bizaare tangent
happens
ok question
you said to solve the length of the projection vector
and then you say subtract the projection vector from the point
when do we use the length?
((AB^T)^(-1))^T=((B^(-1))^TA^(-1))^T=(A^(-1))^T*B^(-1), so the answer is ((A^(-1))^T)^T=A^(-1).
I’m using the properties:
- (AB)^(-1)=B^(-1)A^(-1). This works since inverses are well-defined and since ABB^(-1)A^(-1)=B^(-1)A^(-1)AB=I.
- (AB)^T=B^TA^T
Element ij in (AB)^T is element ji in AB, which is sum a_(jk)b_(ki). But then element ij in B^TA^T is sum b_(ki)a_(jk), so these are equal.
@uneven bloom ((B^(-1))^TA^(-1)) is it ^TA^-1 or ((B^(-1))^T x A^-1?
T is applied to B^(-1) and separate from A^(-1)
so C = A^-1 ?
ok
dang it this is so complicated
applying all these property rules
gonna take a bit till i can do that myself
could you just help me with this last one too please? @uneven bloom
$D = \begin{bmatrix} 3 & 1 \ 5 & 2 \end{bmatrix}^{-1}$
Ann:
thanks @dusky epoch but how do i arrive to a diagonal matrix from that?
what do you mean "arrive at a diagonal matrix"
doesn't D have to be a matrix with 0s on each side of the diagonal?