#linear-algebra
2 messages · Page 42 of 1

If you assume axiom of choice, these function is exists - you can construct this function to use Hamel basis of R over Q. - But if you does not assume axiom of choice, you can't show that nonlinear additive function - If you assume axiom of determinacy, every real function is measurable. And every measurable additive real function is linear.
The function f(t)=E(X(t)) where X(t) is a random process with stationary independent increments
But we can probably assume it is at least bounded
Thanks for finding the link it was an interesting theorem

Yeah I think I did too for continous functions
And density arguments
Ah actually
Since X(t) is defined for all t it has to be bounded on every interval
Yea we actually covered that formula about the det wrt permutations, I just kinda glossed over that day and completely forgot about it.
I'm looking over my notes now and finally see it lol
Thanks again.
I cant wrap my head around this definition
What does it mean S can be extended tk a basis of U
To**
If we have a basis of U
Does it mean we can make S into that basis?
usually it has infinitely many
yes
Sick thank you
There's always infinitely many bases unless it has dimension 0
You can just scale one of the basis vectors and get a new basis
Nope because if for example u and v are linearly indep, then u and 2v is too
Oh shit ya
Try to think of it geometrically
If the dimension is 2 then all vectors not on a straight line are linearly independent
Oh and we can generate vectors not on a straight line by a sum of any two other vectors? (If that makes sense)
Nvm
Maybe not
Nope not in general
Alright. Well thank you very much
Np, btw a good youtube series about linear algebra is "Essence of linear algebra" by 3B1B
Ill definitely check that out
Im confused about the definition of image, if a kernel is the vector matrix that when multiplied by the matrix A equals 0, what is image
i cant understand notation
what is this saying
isnt that infinite?
thank you
another q
what is difference between kernel and nullspace
for this proof, is this enough?
if vector v = sum(k=1, n) a_k v_K but also = sum(k=1, n) b_k v_K
then sum(k=1, n) a_k v_K = sum(k=1, n) b_k v_K
and sum(k=1, n) a_k v_K - sum(k=1, n) b_k v_K = 0
therefore there is a unique solution only
unique basis u mean?
same thing
Just different word. Kernel sounds cooler, but null space makes much more obvious/intuitive sense.
@clever cedar kernel's a more 'general' term for any function between two sets. kernel of a linear transform T on a vector space, ker(T), can also be referred to as null(T)
Thank you
how 2 do this
parallel lines have direction vectors that point the same direction
is the frobenius norm of a matrix the same as the 2 norm of a matrix?
and why or why not?
the two of them seem identical

reposting because it went unnoticed probably the last time
The first two axes correspond to x and y
I'm guessing the last three has to stretch from minus to plus infinity?
And I could define the color to be the remainder when divided by 256?
@rancid sonnet can't help much since im going to bed, but note that nothing is being done to the position of the pixels in order to invert the colors. Lets say you have a color/position (x, y, a,b,c). Then according to the problem, the inverted color is (x, y, 255 - a, 255, - b, 255 - c). Think about what the linear transformation has to do to each coordinate to come up with a matrix representation.
yes I already noticed that
The problem is, just subtracting 255 isn't a linear transformation since it shifts the origin, that's why I thought I had to represent them with that remainder thing
Oh yea duh... hmm I know of way to do it by adding an extra dimension but that is probably unnecessary. Yea idk but I gtg
Dumb question: what does it mean for a quadratic form to be nonsingular? My prof said it meant that the associated matrix was nonsingular, where the matrix M associated to the form Q is the one satisfying Q(v) = v^T M v. But this doesn't seem well defined? If Q(x, y, z) = Ax^2 + By^ 2 + Cz^2 + Dxy + Eyz + Fzx, then we could pick M = [[A D F] [0 B E] [0 0 C]], which is nonsingular iff A≠0, B≠0, C≠0. But it seems like this would say xy + yz + zx is a singular. That sounds ridiculous, since this is just a hyperbola (there's no cusps or anything)
when you're trying to find eigan values
and you're converting to an upper triangular matrix
how do you factor in the negative?
if you switch around the rows?
or do you just multiply by -1?
Hey guys can you help me pls. The question is about vectors. V.W1×W2 = 1 what is the result of W2×(W1-V).W1 ?
V, W1 and W2 are vectors
The answer is - 1?
hey i need a sanity check
@rancid sonnet
You could let the vectors be mod 255, then T(x) = -x which is linear. Problem is, you can't represent 255 seperately from 0 this way
Just let it be mod 256? @half ice
how
I noticed that, if T(x) is the inversion of x:
T(x) + x = 255
Which makes mod 255 a natural choice
oh right
the transformation
hmm
so I'm still stuck
what if
I did it mod256 anyways, and defined the colors to be the remainder minus 1 ? @half ice
and defined 255 to be when the remainder is zero
Anyone wanna help in B?
someone did reply
i dont understand the language of the example
does it mean describe the set that spans those two vectors?
for where u & v span(R)
where R is a set
sorry in my mind if a vector is an element of a span set than that vector can be derived as a linear combination of that set
is that wrong?
that's less wrong than before
I guess ill need to re-study the formal definition
Oh i think see now, span is any linear combination of those two vectors. And from those two vectors I presume we generate the R^2 vector space
That makes more sense I believe
...no not really
lol not really or no
you're trying to say something but it inevitably ends up mangled bc of your unfamiliarity with mathematical language in general
I have no shame in my lack of mathematical parlance. If I fundamentally understand its nototion in my head than I'm happy regardless
no offense but you cannot claim fundamental understanding if you can't word it coherently
non taken and thats fine. Hopfully as I read and study more my understanding will grow
"The span of a set of vectors is the set of all linear combinations of the vectors." @source https://homepages.rpi.edu/~mitchj/handouts/linalg/
so if we ask if v${\in}$span(U) than we're asking if v is a linear combination of the set
Mike0x81:
Ann:
but yes
Incredible, thank you
what's a linear combination of a set?
all possible linear combinations of all the elements of the set?
Can u write down exactly what question / example is confusing u
No, my question was related to your statement

where you said "linear combination of set" @clever cedar
ohh
yes sir
i mean that the set contains some vectors (at least) that can be linearly combined to create the vector
oh
I thought you meant something else
First time I heard someone talking about linear combinations of sets
Is that a term used often? Sounds ambiguous
for this question I solved it by finding the RREF and then finding row and col by inspection
and i did the null by writing pivots in term of free variables
but for this question the answer is kind of backwards
when I find the RREF, i need to transpose the original matrix, why is that?
so the answer to row(A) is a 5x2 instead of a 2x5
can someone tell me if this is a good answer for part 1
these vectors are not linearly independenant because there are 5 vectors and only 4 vectors are needed to the span the vector space R^4. So at least 1 vector is dependant
@charred stirrup u go to uofa ?
ur boy is socal and why @ if no help
r u saying row(A) is incorrect?
i dont understand this question
assuming w and w_1 are in R^4 do i have to see if u is in the subspace of R^4 given those constraints?
is it asking me if u is a subset of R^4 given that w * u = 0 and w_1 * u = 0?
asking if M is a subspace of R^4
what does the stuff after the colon do to the question
like what do i have to take into consideration
i shouldve asked with an easier example
conditions that all elements in M have to satisfy
M contains all vectors in R^4 that satisfy the given conditions
and my job is to check if those vectors which satisfy the given conditions are also in the subspace of R^4?
sorry my professor didnt really explain these problems
you really need to review how to read sets
i was never taught sets in the first place
${x \in \bZ :x \geq 10}$
RokettoJanpu:
x is an element of Z such that x >= 10
no
i mean id be happy to pay u for tutoring if that would help
i am just eager to understand
it's the set of ALL x's that are elements of the set of integers, such that x is greater than or equal to 10
that is the only one ive seen really
RokettoJanpu:
anyone knows how to use matlab or octave??
okay
@clever cedar
u is a vector in R⁴ that, when dotted with w or w1, gives 0
When we say u we're generalizing for ANY vector in the R^4 space?
Well, any u that satisfies
u•w = 0, u•w1 = 0
Oh ok
Ohhhh thats more clear
Any is best in this case
If I said
A = {1, 2, 3}
That means "A is a set that contains 1, 2, and 3"
Ahh okay, theres just so much notation ive never seen in that problem that I couldnt break it down
In your above problem, M is a set that contains all of those vectors that follow those rules.
ohhhhhh thats 100000x more clearer
than i jsut use subspace test to see if that set is a subspace
Yus.
but am i assuming that im checking for if its a subspace of R^4?
since it doesnt clarify which space
It says u ∈ R⁴
I guess you're right that it's not saying which space it should be a subspace of, but R⁴ is a fair assumption
o what happened last time lol
Jk nothing that crazy
oh lmao
How do I do this? Please explain as I want to prepare for a upcoming test
Sorry I'm only in the 7th grade
I'm new btw
A function passes the vertical line test
So it would be c right? Because the x coordinate never repeats
There's only one y for any x, yes
But what does it mean it asked the function of x
This isn't the right channel for you @wintry steppe, try #prealg-and-algebra
O srry
but doesnt M have to be a set for all of R^4
M does not have to contain all of R⁴, no
Just the vectors that follow the rules given there
ffs why am i retard
This is notation you've never been taught, I get it
thank you
@clever cedar
"Passes the subspace test" isn't great reasoning. I have no idea how you'd check for the rules here. Instead, you noticed that S is the span of those three vectors, and a span is always a vector space
The logic is good on the basis and dimension
Yeah im still working on wrapping my head around subspace test. Its hard for me to think of a case when a subspace test may fail considering the infinite possibilities
Thank you for your response on the basis and dimension. That was a concern
@clever cedar
M is the set of all vectors orthogonal to w
If I may use that notation.
1st subspace test:
Is the zero vector in M?
Remember, "to be in M" means "orthogonal to w" here. So, we're asking "is the zero vector orthogonal to w?"
we just need M nonempty, addition and scalar multiplication closed in M
oh so not only does a zero vector have to exist but it has to be orthogonal to w
whatever ill just fail this part ive spent too many hours and its still over my head
"Existing" is "being in M"
and "being in M" is "orthogonal to w"
How am I suppose to know if the zero vector, being in m, is orthogonal to w, when w can be $\in$ of R^4
If you want to move on we can oop
Mike0x81:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
like the zero vector could be orthogonal to w = [1 0 0]
but what if w = [ 0 1 0]
there are literally infinite
posibbilities
No matter what w is, what happens if you dot it with [0,0,0,0]?
Exactly. The zero vector is orthogonal to anything. So, the zero vector is in M
ur mind is fucked that you're able to realize that without problem
Just lots of time with it
Plus some important theorems come from this idea
Fine, I'll give you spoilers
lol
The set of all vectors orthogonal to a list of vectors S is called the orthogonal subspace from S
It's a common way to generate subspaces
oh thats crazy
Want to move onto the second test?
please
You need a special property of the dot product. It distributes over addition
(a + b) • x = a•x + b•x
So let's say u•w = 0 and v•w = 0. That means both u and v are in M.
Is u + v in M?
as long as both u and v satisfy the constraint and are in R^4 then yes I believe so
That is, is (u + v)•w = 0?
I gotta brush up on my knowledge of dot product and other theorem axioms
Yeah that one's important. Luckily there's a very similar one for the next test
k(u•v) = (ku)•v
Makes the third test similar to the second
oh wow so in order to do these tests I literally have to mathemtically prove them
for the given constraint
😛 only with help for 80% of it
Actually, you're getting a lot better
That means a lot
The proofs are eh but you're actually stating what you need to prove, and that's the hard part
interesting, glad im not completely clueless
what's the standard matrix for reflecting about line in y = -x ?
you can work out the columns of a matrix by looking at where your basis vectors go
@young pasture I wouldn't say that cant be the case, but the question by inspection heavily implies that all three of the rules hold for the question, otherwise I think it would ask you to prove it is not a subspace
@young pasture
I was just doing this exact question above with Mike
- Let f(x) = x and g(x) = x3 be vectors in C[0, 1]. (a) Find 〈f, g〉. (b) Find |g|. (c) Find d(f, g). (d) Orthonormalize the set B = {f, g}.
can someone help me with that?
by x3 do you mean x^3
I have the answers but I have no idea how to get it
are you defining your inner product as $\left< f, g \right> = \int_0^1 f(x)g(x) \dd{x}$
Ann:
or something
oh i think so
i saw that somewhere in my textbook but I thought it was just for a specific example instead of for all f and g
yeah i think that's it
thanks a lot
yo
your net wont matter too much i guess since i dont know if its your exercise to teach me lmao
matrix multiplication is defined such that composition of linear transformations corresponds to multiplication of their matrices
can you explain the composition of linear transformations or linear transformations at all?
...are you saying you don't know what those are
what the fuck
i was going to recommend the essence of linear algebra series by 3b1b, as it does a good job explaining certain bits of linear algebraic intuition
im not at a university for math so nope
so if you know this fact its probably not "what the fuck" anymore 😄

🤣
@slender yarrow i saw you typing, do you mind taking this over
what with you being discount me and all
err i don't feel like i could explain that super great since i haven't really done lin alg for quite a while
but i could try
rip
translation: "I ain't tryna talk to these mfs smh"
appuyez sur F pour payer des respects
im here
well i've just looked up linear mapping but probably just the conditions under which a map is a linear map isnt everything which is worth noting about those
its pretty interesting how different the german and the english wiki articles are in contrast lmao
,,,
,,,
well i already guessed this kind of reaction occurs if somebody who hasnt got the opportunity to study at a university wants to learn something trys to achieve that 😉
You're really projecting your own attitude onto their reaction
nah
That's not what they were trying to say at all
...
this is just a reaction
like
are you serious
are you dumb
why
just why
then i'll be sorry
but as you might guess, its a bit hard for me to learn everything on my own
not begging for compassion, just summarizing it
what did you say first
well i had two initial questions
- why are matrix multiplications defined the way they are
- why do we need multiply a vector with a matrix when rotating the vector
Well first thing about matrix multiplying a vector
If you think about all the vectors, matrix multiplication onto vectors is a function from vectors to vectors
so you wanna say that for A x B the function is mapping from $X^{m x n} x Y^n$ to $Y^n$ ?
Marino:
have i wrote that even correctly? lol
Nah, I'm talking about matrix times vector multiplication right now
So take a matrix and multiply it on the right by a vector
The mapping is just Y^n to Y^n
and tried to say that matrix m x n multiplied with vector of dimension n results in vector of dimension n
well the mapping takes two arguments doesnt it? matrix and vector
The function is just from Y^n to Y^n because you take vectors from Y^n and the matrix multiplication sends them to vectors of Y^n
No you just fix some matrix
oh so we imagine a static matrix?
Every matrix gives rise to a function from Y^n to Y^n
well you mean that for every matrix we could define a function which maps the vector to its product (with the corresponding matrix)
yes
yeah makes sense
So every matrix is just a function
But now we have some idea of multiplying matrices
stop
But if we take two matrices A,B and a vector v
So every matrix is just a function
well you mean that we map an index to its corresponding coefficient?
uh what
This is what we've been talking about
"Every matrix gives rise to a function from Y^n to Y^n"
The matrix is a function that takes elements of Y^n and outputs other elements of Y^n
wait xDDD
we talk cross i think
can you give me an example to show me what is getting mapped to what?
because if we talking about matrix as a function i had thought we map an index to the coefficient, so I -> X where I is the index set and X the set which the coefficients lie in
$\begin{pmatrix}
1 & 2 \
3 & 4
\end{pmatrix} \begin{pmatrix} 1 \1\end{pmatrix} = \begin{pmatrix}3 \ 7 \end{pmatrix}$
Zopherus:
so for the static matrix (1,2,3,4) each vector gets mapped to another vector which is the result of the multiplication matrix * vector?
yes
ok
Zopherus:
In other words, if we multiply the matrices AB and then apply the function to the vector v
It would be the same as if we applied the matrix/function B to the vector v, then applied A to the new vector
well but do we know how the function has to look like? the Y² -> Y² one
i just used ² for readability reasons
Yeah
then we should clarify that function design first
how does this function look and why?
the "map static matrix * vector to new vector" one
How it looks is easy, the why is a bit more tricky
But starting with the why is more important
yeah sure
The idea is that as you read, there are linear maps from Y^n to Y^n
These are vaguely like lines through the origin
that would be x ↦ a*x ?
Yeah
Its basically this idea, but in higher dimensions
And skipping over some of the details here, it turns out that all linear maps from Y^n to Y^n can be represented as a square matrix
Yeah, there are just a lot of details here that I don't really have the time to fill in
If you really want to learn this stuff, you should read a book
okay
but the square matrix you talked about
so do you wanna say this matrix is finite?
The dimensions of the matrix are exactly n by n
but static matrix * every possible vector can be summarized in n*n values? o.O
Because it's a linear function yes
and i guess this matrix is the matrix multiplication right? 🤣
uh what
oh wait no
wrong
but how is it going on? which relation does the n*n matrix have to the matrix?
Nguyễn Thành Trung:
any idea for this problem?
$\begin{vmatrix}1+x_1&1+x_1^2&\cdots&1+x_1^n\1+x_2&1+x_2^2&\cdots&1+x_2^n\\cdots\1+x_n&1+x_n^2&\cdots&1+x_n^n\end{vmatrix}$
Nguyễn Thành Trung:
A particle is fired downwards at speed v from height z equals H. It then moves freely under gravity. At what time does it reach z equals 0?
hi guys i dont know how to start this question
could anyone help
@lost comet wrong channel
which channel
you should be in either #prealg-and-algebra or #precalculus
im having trouble finding the determinant of b
using co factor method
im doing something wrong
the first matrix is the original matrix
im supposed to be getting -2
but i get like -8 or something
or maybe this is right?
idk could someone check
o which mistake
the one you were telling me about last time
oh lol
happens lol
c.
oh haha
lol yeah
theres a alot of rules to remember
so its understandable
do u still need help with the above q?
oh nice
Can someone please explain to me what reduced cost means in layman terms in linear programming?
Everything I read online makes no sense to
u talking to me?
yes
im not sure what r is
lol
true
what do you mean exampleS?
i checked the explanation online
but i still dont get it
not sure where they get the identity matrix from
yes
u havent asked a question
Hey anyone know what I should do to find a basis for col A
I know how to get col A
and I know how to get a basis of something
I know how to get something in col A*
@wintry steppe
A change of basis matrix (Not an identity matrix!) maps β to η.
Any linear transformation in the first basis, when composed with the change of basis, gives the same linear transformation in the second basis
I'd like to repeat, absolutely not an identity matrix
@topaz plover
Row reduce. Any column without a pivot represents a vector that's causing linear dependence. Cut them off, you have a basis
what's the difference between the dot product and matrix multiplication?
A dot product is a binary operation on vectors to the target field, while matrix multiplication is the composition of linear transformations. The difference is pretty much... everything 
Vector dot vector = real number
Matrix multiplied by matrix = matrix
matrix multiplication is the dot products of all the row vectors of the left matrix with all the column vectors of the right matrix
I see
@half ice isnt that how you get a basis
but how do you get basis of col(a)
like what you said thats how you get a basis of a mtrix
is it the same for getting basis of col(a)
what about getting basis for nul(a)
@topaz plover
What you're calling "the basis of a matrix" is actually "the basis of col(a)"
For null(A), multiply by a general (a,b,c,d) vector, find out how to get the zero vector as an output. This is also done by row reducing
why is that for a system to have uique solution, the determinant of coefficient matrix must not be zero?
unique*
because invertible matrices have non-zero determinant @north sierra
true
and if the determinant is zero, it's linearly dependent right?
the columns of the matrix
yep. And if the columns of a matrix are linearly dependent, then the kernel is nontrivial, which means non-unique solutions
yea.
And the kfc guy
npnp
Property to know:
det(A^-1) = det(A)^-1
could someone help me with this plz
That's why a matrix with determinant zero has no inverse. If it did, it would have a determinant that divides by 0
@topaz plover
You've got to reduce!
Try to get the pivots in the same place
could someone check my answer for this
just for x1
the back of the book says 7/(3p-3)
but i think they're wrong
i double checked my mark though
i let p = s
cause s looks like 5 and it gets confusing
You want to find a vector u in H, and a scalar c, such that the vector cu is not in H
Is (6,14) in H?
H is the set of all vectors of the form (3s, 2 + 5s)
oh
does there exist a number s such that (6, 14) = (3s, 2+5s)?
if yes, then (6, 14) ∈ H. if not, then (6, 14) ∉ H.
how to i figure out if it's an element of H?
does there exist a number s such that (6, 14) = (3s, 2+5s)?
if yes, then (6, 14) ∈ H. if not, then (6, 14) ∉ H.
i just wrote it
lol
i know your brain's stuck in overthinking mode
yeah
but please read stuff people are saying
it is lol
snap out of it
LOL
does there exist a number s such that (6, 14) = (3s, 2+5s)?
if yes, then (6, 14) ∈ H. if not, then (6, 14) ∉ H.
You want
(3s, 2 + 5s) = (6, 14)
By looking at the first entry,
3s = 6
s = 2
But that gives me (6, 12), not (6, 14). So my attempt to shove (6, 14) into H has failed me.
Oh yeah, that's the easiest way to break it. But your random choice did too
true
i'd suggest working backward from the rref to get the right constants in your rows
Hello, i'm trying to create a spherecast against a triangle and stumbled upon a problem for which i need vector math help. I am trying to detect collision between a spherecast and a line segment, however, not just any point, but the closest to the spherecast's origin. I've transformed the logic of the problem to be: find the points on 2 defined rays: AB and CD which form a third ray EF that has a defined length. The point E on ray AB should be chosen to be closest possible to ray's AB origin point A. https://i.imgur.com/hgUNnTm.png
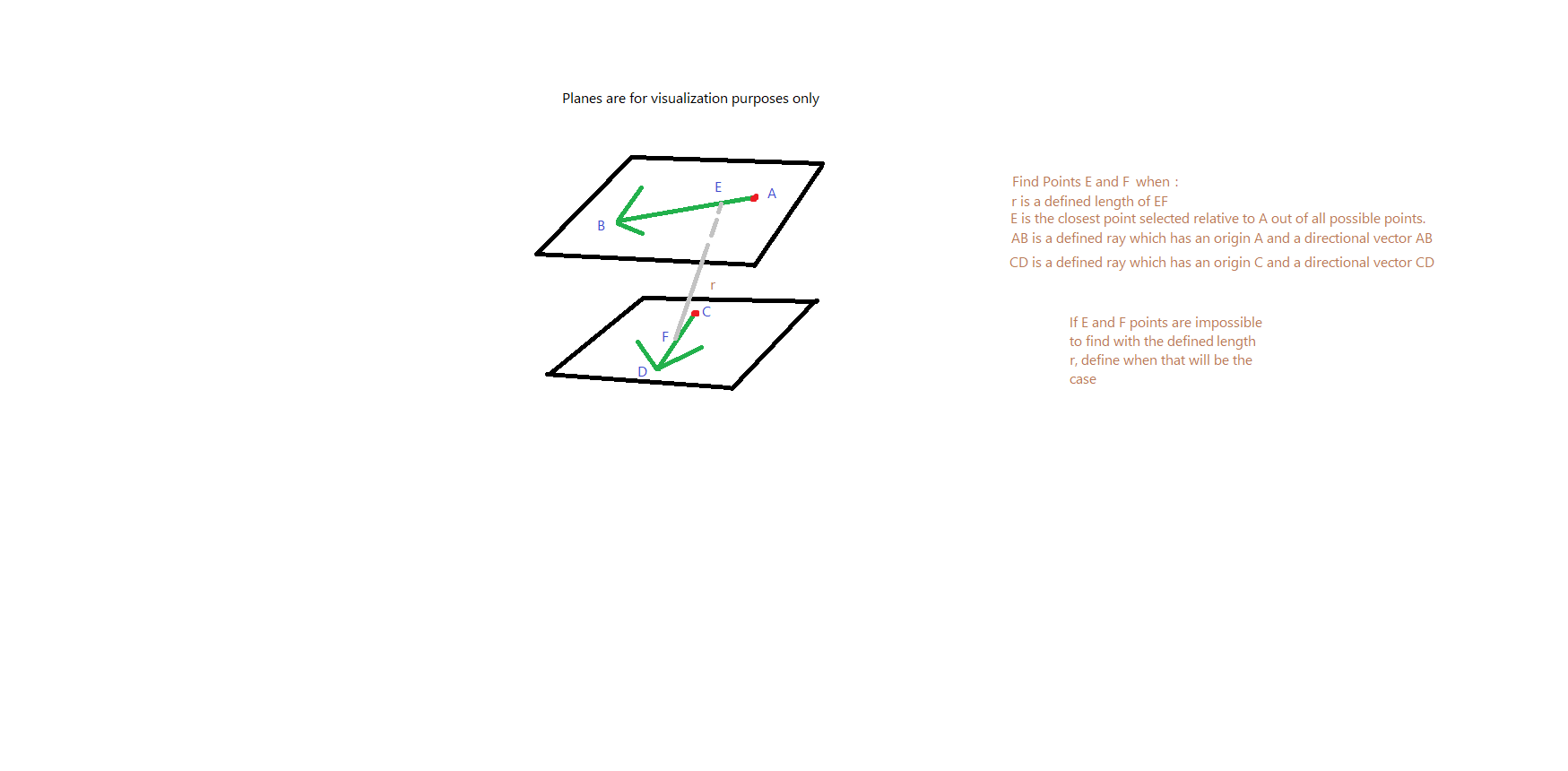
ah but the planes are important
use planes that are parallel to both vectors
@unborn rover
if r is really big, it's possible, right?
then it has something to do with distance between planes
column dependence does not change from row operations
if column A is 2*column B - 3*column C in the original matrix
that will still be true after doing row operations
@steady fiber what do u mean
Can you see if two vectors is linearly dependant or linearly independant based on the diagonal having leading entries when reducing
to row echelon form?
2 Vectors:
(6, -3),
(-4, 2)
in R^2
According to this website it seems like that, but I want to be sure:
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi?cmd=li;vdat=2;vdat=R2;m1_1=6;m2_1=-3;m1_2=-4;m2_2=2;curn=2;curn=2;submit21=Submit&hideops=0
Oh that's very smart
3 3 1
b 2 and f
0 d 1
Must be linearly independent @topaz plover
@winter siren
You can always take any set of vectors, and cut some out to create a linearly independent set. Put them into a matrix and row reduce, any column without a pivot represents any vectors you should cut out.
so this is not closed under scalar multiplication cause of the second row
but what about the first row and third row?
@half ice ya ik but like
idk what to do
I have a a matrix with variables
and
a reduced matrix
Basically,
3 3 1
b 2 f
0 d 1
Has a non zero determinant
you also know that [3 b 0]^T and [a -8 0]^T
are linearly dependent
so they have to be multiples of each other
and so a = -24/b
that was the easiest dependence to see
but there's a ton of easy dependences in the vectors you can see
just use them to find the relationships between the variables
"You can always take any set of vectors, and cut some out to create a linearly independent set. Put them into a matrix and row reduce, any column without a pivot represents any vectors you should cut out."
I'm sorry @half ice, but I don't quite get it.
pivot = A non-zero entry in the diagonal?
"... any column without a pivot represents any vectors you should cut out."?
@winter siren
I suppose the thing I'm getting at is to row reduce
You won't get the identity matrix
6 -4
-3 2
Does not reduce to identity, so the set is linearly dependent. Another easy way to see that is
-2/3 (6,-3) = (-4,2)
You can make one vector using the other, so the set is linearly dependent
Ohh, okay.
Thanks @half ice
do I like
You know that if you multiply that vector by A, then you get b
No matter what s and t are
@topaz plover
A is a linear transformation. So:
T[(1,0,-3) + s(5,1,0) + t(-2,0,1)]
= T(1,0,3) + sT(5,1,0) + tT(-2,0,1)
= b + sT(5,1,0) + tT(-2,0,1)
But that should be b. So, the other two parts must be 0
The same thing without the (1,0,-3) bit is the nullspace
If v is a vector of arbitrary dimension (finite) with complex number coordinates,
does < v, v > = 1, imply <v complex conjugate, v> = 1(dot product)
so far, I've got
<v,v> = complex conjugate of <v,v> as c. conjugate of 1 is 1
so complex conjugate of <v,v> = 1
i.e. conj( v1^2 + ... + vn^2 ) = 1 [if v is n-dimensional]
=> conj(v1)^2 + ... + conj(vn)^2 = 1
I'm trying to get
conj(v1)*v1 + ... + conj(vn)*vn = 1 which would give the result <v complex conjugate, v> = 1
<v,v> = 1 means v is a unit vector
but also, for $v \in \bC^n$ you do not have $|v| = \sqrt{\sum_k v_k^2}$ in general
Ann:
actually, $\frac{1}{\sqrt{2}} (1, i)$ seems \textit{orthogonal} to its own conjugate, if anything.
Ann:
hmm but if I let v = 1/sqrt(2) [1, i], isn't <v,v> = 0 and not 1
I'm trying to start with <v,v> = 1 and arrive at <conj(v), v> = 1
though, I'm not sure if it's true / can't find a counter example
Ann:
think about it, it makes no sense for <v,v> to be 0 without v itself being 0
oh crap... yeah, it wouldn't be an inner product otherwise
I had the wrong definition in mind x_x thanks
(i.e. I thought you do the same as if it were for real coordinates, just multiply and sum corresponding entries)
yeah no you gotta conj
mhmm, I see that now, thanks !
Sorry I'll wait
$U^* = \begin{pmatrix} u_1^* \ \vdots \ u_n^* \end{pmatrix}$
Ann:
if you're asked to find eigenvalues for a matrix to the 5th power
could you just get the diagonal numbers and put them all to the 5th power?

sorry if tahts a dumb q..
is column space the same thing as the image?
i know this is obvious as hell
but specifically
how do you take determinants of matrices in a matrix
nani
yes
i know that
like i know how to take determinants of a matrix, but how do you take the determiannt of matrices in a matrix
formally
So if $A = \begin{pmatrix} 1 & 2 \ 3 & 4 \end{pmatrix}$
Zopherus:
det(A) = -2
but how do you take the determinant of a matrix, in which its entries are NOT numbers, but matrices
then $\begin{pmatrix} A & 0 \ 0 & I \end{pmatrix} = \begin{pmatrix} 1 & 2 & 0 & 0 \ 3 & 4 & 0 & 0 \ 0 & 0 & 1 & 0 \ 0 & 0 & 0 & 1 \end{pmatrix}$
Zopherus:
yes i know
but is there any easy way to do it?
as in, you don't know how large A and I is
So
like for some arbitrary A and I?
yes
what is the context of this question?
without writing all the entries of A and I itself
lmao just that
any easy way to do it?
Think about what you know about determinants
Or ways to calculate determinants
And try to use those
The elements of this matrix are not matrices, it's just a shorthand for writing matrices of numbers
oohh..
when you say it like that
hold on gimme a sec
thanks, i got an idea
i thought there was like a shortcut/easy way to do it
any hints on this one?
<@&286206848099549185>
Ive broken down the matrix, but can't seem an easy way to do this at all. I was able to do the previous 2 by breaking down the matrix and seeing that row reducing made it simpler
I know that the determinate of an upper triangular matrix is just the multiples of the diagonal
maybe that can help?
i thought about it
How much linear algebra is reasonable to learn within a month?
Trying to study for putnam
depends on how deep an understanding you want
for putnam for the most part information about invertibility and determinants are most important, but learning them without prior structure might not be ideal
what is putnam?
hardcore math competition
also goon
waddup
it is useful to try to decompose your matrix into the product of two matrices
then note that det(AB)=det(A)det(B)
decompose matrix into product of two matrices?
correct
mmmm any examples
besides this one
yep
like
i'm slow at latex so i'm hesitant to really construct an example but
like see the previous problem you did
you proved the determinant of that matrix with and A and an I on the diagonal is det(A)
how did you do part (a)
yeah there's a reason a and b come before c
you can write your determinants in C as the product of determinants in a and b
of matrices rather
than determinants
and what I did was, determinant of that is equal to the same thing, but instead of an I matrix that is nn in size, i let it be equal to (n-1)(n-1) in size
in short, shrinking it
til it just becomes
det(a)
the second part
I did row reduction
until the diagonal entry B and C disappeared
part C is where i'm stuck at, can't row reduce, can't triangulate for any finite sized matrix
because I'm supposed to show this holds true for any finite sized matrix
I can't just use a 2x2 example
and prove it
but
why can't you row reduce?
I can row reduce, but it has to be any finite sized matrix, i have to make my argument convincing, think of this as a proof
uh okay? You row reduced for part (b)
Why wouldn't the same thing work in part (c) then
too many variables to work with, and I have to show its true for any finite size
part (b) also had a lot of variables
I also don't see why more variables would be a problem
by allowing me to row reduce nicely
for part b, the one with the C matrix
I just argued that the identity matrix, the leading entry in that row will just cancel out with each entry in C
since it was identity, and the one next to Identity is 0
it has no effect on the matrix D
thus allowing me to make C "vanish"
for part c
any row reduction has some sort of impact on other matrices
in short the identity let me row/column reduce very VERY nicely
think of it as a proof
It'll work
but so much work
that was what I was avoiding lol ^
It'll turn out that the values of C won't matter in the end
The proof is actually the exact same
I tried row reducing to make all the entries in A disappear, but that modifies matrix A
but like use what you've already proven
c directly follows from reducing to a and b
don't row reduce more than you have to lmao
ok ima just give up and say this lmao
goon pls
[A 0 C D] = A*[I 0 C D]
done
i can factor a matrix out of a row
determinant of that
done
dunno how valid that sounds
but w/e
[I 0 C D] *[A 0 0 I] = [A 0 C D] peppega
🙂
shouldn't
uh do the mat
i did
i did too
how'd you get AC?
you shouldn't multiply by a row with A in it for that term
no wait mb flip them
that's probably actually not too bad
free
it tells you that 0 is equal to 0

Aight thx
if in the final row
help me with reimann sum longhand calculation, memes
Yup
thought it's spelled reeman
if you get 0 = anything other than 0 then you have no solutions
fuckin amphy

{kind=link}
{kind=link}
{kind=link}
{kind=link}
the second part idfk lmao
what
i wanna say 3, but that sounds too obvious
it's saying is w in the column space of the v's
does matrix formed from the v's and then set equal to w have a unique solution?
nah
so then w is not in the span of the v's
that is saying how many unique basis vectors do you have?
since we have a free variable we know that there is some non zero combo of c_1(v_1)+c_2(v_2)+c_3(v_3)=0
cause one vecter is a multiple of another
yes
true
so there are only actually two vectors for this span
the third is just some combo of the other two
so can you see geometrically what is happening?
how about a quick vc to let you see it a different way then

@native lodge why should a matrix formed by the v's have to have a unique solution for w to be in {v1,v2,v3}?
because then that means there is one and only one combo of the columns of v to give w. When that happens that means w is in the column space of the v's
so now suppose that w is the zero vector
ok
we now have two ways to arrive at the zero vector, that wasn't just setting all constants to zero
we are back to being linearly dependent
wait i think i mixing things up
so when it says is w in {v1, v2, v3} does that mean span?
yes
that is asking: is w in the span of the v's
another way: is w in the column space of the v's?
How am I supposed to do b
how much work do we need to provide?
we can answer this question by inspection actually
oh wait, we need to do the math to show it
but first let's just answer: independent or no? Can you tell right away?
not sure kinda forgot how
our vector space we are in is given by the number of components in the vectors
so we have three components, so we are in R^3
the most vectors we ever need for a basis of R^3 is how many?
massive red flag detected

Uh
but still how many vectors are needed to form a basis for R^3?
whats the dimension of R^3 is what he's asking
3x1 ?
visualize R^3 as 3d space