#linear-algebra
2 messages · Page 41 of 1
my book has problems with the word in it
and doesnt describe it in the chapter
i did ctrl+f axiom
and its not in the chapter
properties/truths taken without proof
like a vector space has certain "properties". Those would be the vector space axioms
yea so any inner product (dot product) is linear in the first term , conjugate symmetric, etc...
list? as in table of contents
o
oh
i get what u mean
the properties like distributive
associative
etc
like u* v = v * u
Yup, exactly that. Rules we use to say what the dot product "is"
oh i see
thats cool fancy word
ty now i know
that was dumb
i proved it using triangle inequality
wtf
hmmm that doesn't sound right
i can show
someone else will have to hlep cuz i gtg
kk
I'm all ears
oh
he just didnt agree with my proof
i said i solved it using triangle inequality
and he disagreed with it
idk why
Im having some issues here
"Suppose that M is an n x n matrix of finite order. Find all possible values for det(M)"
Am I missing something, cant it be anything you want by having 1's on the diagonal and 0's everywhere else with the determinant you want on some diagonal entry?
Seems like too simple of a solution
What does a matrix having finite order mean?
Good question, I assumed it means that the size is finite, but probably not huh
Nope
probably means... uh, I will go back to the textbook
thanks
wait
finite order means M^k = I for some k. So det(M)^k = 1
So det(M) = 1^(-k) = -1 or 1
does that sound about right?
Oh dang, I didnt even consider complex numbers
I think it might be every rational complex number such that its magnitude is 1
or maybe irrational would work too, hmm
What does it mean to be a rational complex number?
I was thinking that its angle wouldnt be an irrational number, so that it would eventually return to 1 after some number of powers, but I might have that wrong. going to dig deeper
actually that source of the problem looks very similar to a linear algebra textbook we use.... is that the open textbook one?
yeah its the same we use
yeah
york?
let me guess
r u taking 1025
damn
the prof wasnt explaining that well tbh... i didnt do well on the first test, and those lyryx assignments were taking so much of my time, so i dropped it
tbh ur brave for taking math major at york
(but i'm taking in summer)
yeah
chow?
i have steprans
i pray for you
lol
i heard so many things about that prof
i dont even go he just reads proofs
is it true that he hates questions?
yeah lol
first midterm average was 46% and second was 57%
wow that's crazy, ours was like 73%
ours was pretty easy to be honest the first one
it was five questions ours
it was ridicously easy epsilon delta question we got
i actually hate it was easy that epsilon delta question because that's the one i studied most for for that test, and it was just a waste of time to practice the complicated ones
i could have done better in the first testt, but i was just surprised that it was asking the basic things rather than proofs or harder things..
makes sense that happens
like one of the questiosn was..
graph an absolute value function or something
lmao
5 marks
oh wtf
damn i gotta find out if hes teaching next semester
she*

she's very good at teaching, she seems to know her stuff, but yeah im definitely going to take her classes in the future
do you have 1031 next sems
1131*
I think I figured it out. det(M)^k = 1, k being an integer, means that det(M) is any complex number such that the angle is a rational fraction of pi
intro to stats
right
Okay
Obviously all those things work
But why are those the only things that work?
Because it has to be of the form cos(2k * pi / n) + i * sin(2k * pi / n)
According to a formula on Khan academy. Where k can be any integer and n can be any non-negative integer
Also not 0
Because that formula to the nth power will equal 1
The magnitude has to be 1 or else the magnitude will grow or shrink beyond 1 with powers. The angle has to be such that adding that angle to itself will result in some multiple of 2pi. So n * theta = 2k * pi. Then theta must equal 2k * pi / n for some integers n and k
No problemo
Can every invertable matrix be inverted using elementary row operations?
Because sometimes I just feel like I'm getting nowhere with that method
yes
Can I always use other methods or sometimes I'm forced to use elementary row operations?
In some cases
what "other methods" are there
By using the matrix of algebraic complements
Sorry, I don't know how to say this in English
You could use adjugates in general. Also, the row operations result is implied by the existence of an inverse (we’re assuming square for these purposes).
Yes
But it's easier for me to just use the presumably longer method rather than the operations
Unless the matrix is bigger than 3x3 or it has like 0s everywhere
what is your native language
it takes lot of time to calc the inverse of a matrice bigger than 3x3 or 2x2
Polish
You should ideally be able to execute several different methods
But there’s no problem with having a preference
Sometimes there are matrices similar to this
This one is super easy obviously but yeah
use ur computer to invert big ones
But with this one for example, I had trouble using the row operations method
Maybe someone can invert this one with it?
U could find inverse if u know how to find determinant and adjoint matrix as an another method

@slow gyro Okay show us what you have so far?

Is there a intuitive way to think about generalized eigenvectors
I understand eigenvectors and eigenvalues, but the generalised one is just a mess for me
Can you give an example?
Okay
Well you understand that sometimes
There can be not enough eigenvectors right
yep
Like for $\begin{pmatrix} 0 & 1 \ 0 & 0 \end{pmatrix}$
Zopherus:
You'd want two eigenvectors, but there's only one
Generalized eigenvectors are a way to remedy this problem
By extending the idea of eigenvector so that this matrix has two "generalized" eigenvector
Well, it has one normal one, and one "generalized" one
yep
That's basically it
It acts kind of like an eigenvector but isn't really one
But we use it to remedy the issue of not having enough eigenvectors
So we can do things like jordan canonical form
So an eigenvector of a matrix will only increase in length after matrix multiplication right?
what would a generalised eigenvector do?
or is it strictly for filling in the blanks
"increase in length" no
soz
an eigenvector gets SCALED
but I don't really have the jargon with me
not necessarily by a scalar greater than 1 in absolute value
thanks
go to #prealg-and-algebra or #precalculus for help. This is not the algebra ur thinking of lol
lol oki
ah, btw, I just found out what generalised eigenvectors are used for
they just covered it
super coincidental
is a subspace a strict subset of some vector space V? or can V be a subspace of itself
The latter
Yeah the notation isn't great
Some people use it just to mean subset and not necessarily proper
The exact same
would the standard matrix for a rotation of 180 degrees about the line passing thru the points (0,-1,-1) and (0,1,1) be [(-1,0,0), (0,-1,0),(0,0,-1)]
Trichloromethane:
<@&286206848099549185>
Solve what?
they found that the solution to the linear system
for any X Y
is -2x+3y[vector]
- ( x- y)[vector2]
Hi! Got a bit stuck on solving Gaussian elimination with an variable a inside the augmented matrix.
The solution is supposed to have many solutions and I was told that the last row has to be 0, 0, 0.
But if I set a = 3, I get 3 - 3 = 0 on LHS
But on the RHS I get: -4a - 3 = -4 * 3 - 3 = -15
Probably doing something wrong in the calculations but can't see what.
im confused
in the second step
u switch row 2 and 3
oh u switch row 1 and 3
u forgot to switch
the coefficent matrix
when u switched rows
@winter siren
Aw, I didn't switch RHS numbers
Alright, I'm new to linear algebra so neither do I 🙂
:p no worries
takes practice
but after ur second step
when u made the row with pivot column that has 'A" be in the third row
the only way to get rid of that "A" in the third row
is to divide the row by A
A/A = 1
then subtract row1 - row3
which will get 0
in that column
<@&286206848099549185> is linear dependance for a matrix different than linear dependence for vectors
im getting two conflicting definitions
if you have a matrix A which doesn't reduce to I completely
is (A | I ) ~ (R | A^-1) true?
cuz the way i did it was copy down all the elementary matrices to get A-1
but that was long
R being RREF(A)
no
if it doesnt reduce
than its not invertible
do u know how to calculate determinant of a matrix?
for the future when u do A | I
augment ur matrix so u apply row operations to I
so u can check if sigma of Elementary matricies is equal to I
but in this case i guess its not a big deal
and yeah since u cant get A to RREF
A is not invertible
r u saying R = I?
ok thanks 😄
np
okok
because if U is the sum of all elementary matricies required to take A to R
then logically AU = R
i mean yeah because A would be an n x n matrix
exactly
I did
thats how I came to the conclusion
but im wondering if its correct
because my book says it doesnt have solution if its a = -1
i mean thats nearly impossible for me to answer without seeing the RREF form
ask urself what it means to not have a solution
then think about if that clause it true when a = -1
so my book is shit
if it looks like an identity matrix
then its linearly independant
that is, the RREF form has pivot columns for each column
yeah
In general, if the rref has a pivot in every column, then the original columns were linearly independent.
it has infinite solutions
if it has infinite solutions than its linearly dependant
just assign the row with all zeros to a variable then by using back substitution u can see
that the other rows are dependant on that variable
np
Hi all, I'm trying to write a neural network in C++ and I'm getting pretty stuck with the backpropagation part, and always seem to end up with biases that are too large. Would anybody be available to help me troubleshoot? If I'm in the wrong place please let me know
thats a pretty large and loaded question
neural networks are a topic far above linear algebra even though its foundation includes it
yeah I know, I don't understand what's going wrong though
I'm not certain what's actually causing it to fail or why
my knowledge of ML is akin to my knowledge of cantonese. The best I can suggest is asking stackoverflow or machine learning subreddit
alright, thanks anyway
ah, thanks!
np
l e a r n i n g r a t e?
@jaunty talon
its not always trivial to debug something like that
I think it's an issue with finding the gradient
it doesn't tend to 0 like it should
because your learning rate is too high
and you are overshooting the optima
then again it might be cause of something else completely
but a lot of the time thats it
@clever cedar Any linearly independent set is a basis for the space it spans.
i thought linearly independant sets dont span
I've dropped the learning rate to 0.1 from .5 and it doesn't seem to have had any effect
they might not span their parent space, but the span their own subspace. does that make sense?
i havent read the subchapter on subspaces i guess thats my issue
what do you mean bogus output?
there is no such thing as a correct output for your final weights
ergh dont mean to be a dick but can u guys move ur discussion to a quiter channel. Considering the basis of victoria's argument is conjecture
span(U) is a subspace of R^n in that theorem
 conjecture
conjecture
yeah sure, mind if i DM you?
thanks!
$span(x_1...x_n) = { a_1x_1+a_2x_2...+a_nx_n | a \in F}$
Victoria:
where F is the field your vector space is over
oh
so by definition anything in the span of U is a sum of vectors in U
Let V be finite dimensional inner product space, consider an positive definite operator T from V-> V show that T has a unique positive square root
idk how to start
how does this make sense
i thought linearly independant sets dont span
for any vector in their set
what do you mean they don't span?
linearly independent sets have a span, which is once again $span(x_1...x_n) = { a_1x_1+a_2x_2...+a_nx_n | a \in F}$
Victoria:
span is just when u have a vector that is a product of a multiple of any other (at least two) vectors
where x_1..x_n are independent
that is false
say i have (0,1,2)
then, (0,2,4) is in the span((0,1,2))
wait ok
why doesn't a linearly independent set span anything?
I don't understand what you mean
because lets say we have three vectors
and two of the vectors as a linear combination dont equal the third
uh huh
then its impossible for any other arbitrary vector
to equal a linear combination of two
idk
lets say
we have
([0,0,1],[0,1,0],[1,0,0])
i can write any other vector as a linear combination of these three
but they are linearly independent
any other vector in $\mathbb{R}^3$ of course
Victoria:
does my other vector have to be a linear combination of all three of those vectors
what other vector?
'i can write any other vector as a linear combination of these three

u said that
yes
im quoting u lady !11
any vector can be written as a linear combination of those three vectors, yes
ok
like if i have a vector [a,b,c] = a[1,0,0] + b[0,1,0] + c[0,0,1]
right
so we have a linearly independent set that spans $\mathbb{R}^3$
Victoria:
aaaaaaaaaa

ok so
if we are in $R^n$, we need at least n independent vectors to span $R^n$
Victoria:
thats fine i appreciate ur help
ill show u why but u can ignore it one sec
- no vector is in the span of others
and 1. linearly independant
oh i think i misunderstood
no vector in the set
is what its saying
yes
this is prob dumb but i don't really get what geometric multiplicity is
uh only char polys
ok well actually the easiest definition is
given some eigenvalue $\lambda$ of some operator T
Victoria:
then, we define the geometric multiplicty of $\lambda$ to be $dim(ker(T - \lambda I))$
Victoria:
in other words its the amount of linearly independent vectors associated with that eigenvalue
since those make up the basis for our kernel
i'm ngl i feel like i've NEVER seen dim or ker before but
in this case, the geo mult of 3 is gonna be 1?
yes
cuz theres only one eigenvector for eigenvalue 3?
are there cases where theres more than one basic eigenvector for an eigenvalue
yes
hmm ok
you can explicitly construct them with JCF
like
$[
M=
\left[ {\begin{array}{ccc}
1 & 0 & 0 \
0 & 3 & 0\
0 & 0& 3\
\end{array} } \right]
]$
Victoria:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
ohh i see
$[
M=
\left[ {\begin{array}{ccc}
1 & 0 & 0 \
0 & 3 & 1\
0 & 0& 3\
\end{array} } \right]
]$
Victoria:
could someone explain to me what i'm doing wrong?
im supposed to get 0 but i don't know why i am not
did my book do it wrong?
same result as what?
P*D^4*P^-1
oh damn
lol
turns out the solution is, indeed, just wild
why is this the case?
as in why is that the general solution to that matrix
x3 and x2 are free, what the heck are those vectors?
nvm im dumb
is the determinant equal to the product of the pivots when a matrix is in echelon form?
how do you convert this to polar form?
it could also be lower triangluar form tho right
true tah
dude
something weird is going on
can you check my work and someone elses work?
ill try quickly
what's the answer for it 👀
why
because u multiplied the determinant B by 3 in one of the steps
so in order to equate it back to the original determinant
u need to do the inverse
which is divide by 3
see ur row 3
huh
in step 3
yeah
look at row 3 in step 3
u did
-2R1 + 3R3
in order to get 0 in that column
for row 3
yeah
since u multiplied R3 by 3 in that step
u need to divide the determinant by 3
in order to balance it
its one of the rules
if u switch rows then u need to multiply determinant by negative
in this case u multiplied a row by a scalar
so determinant = determinant/scalar
just a rule
oh true
wait so whats this rule
yeah exactly rule C.
implicilty it says
Det a = detb/k
since u want to solve for detA (the original matrix)
divide both sides by k
to isolate detA
ok i gtg
gl
npnp
:p
could someone help me out on this if possible? i got it wrong and i cannot figure it out
ive got two of those wrong, so i think if i can figure out this one i will be able to figure out the other one
I'm a bit confused by the notation
same lol
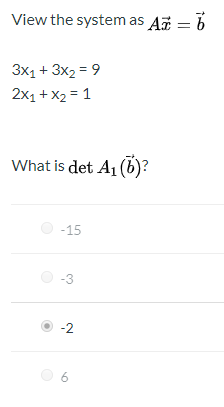
what is A_1(b)?
thats what im trying to figure out haha
also would b = (9, 1)?
yes i belive so
the rest of the problems dealt with Cramer's rule if that helps
just reposted for context
does 1. state that V is in the span of that set?
rm7gaming
just make two matricies
the span of https://i.imgur.com/RTMnXyi.png creates V
yeah
replace the first column
with the coefficent matrix
then take the determinant of that matrix
and divide by A
here ill write it down and send a pic
k appreciate it
haha np
i thought that
easy just tedious
each column of a matrix represents a variable
so column 1 = X, column2 = Y, column3 = Z etc
so when u wanna solve for X u replace the column 1 with the coefficent matrix and divide by Det(A)
solve for Y, replace column 2 with coefficent matrix etc
because here we're solving for A_1
oh ok
oh ok cool
ya
interesting that ur course already taught basis and spans
before cramers rule n stuff
oh that's what that means?
and mine is other way
i think we just skipped cramers actualy
but he did an extra credit quiz with cramers
true
so for this one the answer would be....

{kind=link}
{kind=link}
{kind=link}
give me a sec im gonna solve it
@clever cedar
56 right?
if we say x spans the set U, that means that x can be made as a linear combination of the set U?
yeah 56
k cool
lemme read urs... the theory ones are hard
well.... span is made using linear combinations of a set of vectors
so i think that the way you wrote that might be backwards kinda
oh ok
is x a vector or a set of vectors?
x is one vector
U would create x by a linear combination which would mean that x would be in the span of U
ya that that applies^^
if x is just a single vector, it means that anything in U is a scalar multiple of x
if x spans U
yup
just sent you a friend request mike, i think we could probs help each other out bc we are kinda at the same spot
if either of us need it
jfc i cant understand the definition of span
can someone help me
If I have a set of vectors called U
and one vector X
what does that mean in terms of span
what is U in the case that x spans(u)
span(U) = all the vectors you can possibly reach by taking linear combos of U's vectors
oh ffs
i dont udnerstand why people dont just say
x is a linear combination of the set U
hey at least you already know what that means, so in some sense the terminology is easy to learn
span is what you'd think it should be
I see, thank you
now my next concern is this
what does 1. mean
i dont understand that notation
any vector in the subspace of R^n is equal to the span of u?
all the linear combos of that set of vectors {u_1,...,u_k} make up V
well for instance you can imagine 2D subspace of 3D space as (1,0,0) and (0,1,0) being the 2 vectors that span this 2D subspace
I could have worded that more clearly
there are
the span of two vectors contains infinitely many vectors
so does the span of a single vector
span((1,0,0), (0,1,0)) = all vectors of the form (a,b,0)
oh so when we say vector is in the span((1,0,0), (0,1,0))
then the vector lies within a linear combination of that
that vector can be rewritten as some linear combo of (1,0,0) & (0,1,0)
you're welcome
Does the set of all nxn non-singular skew symmetric matrices form a field using the regular definitions of matrix addition and multiplication ?
I think so, but I've been wrong before.
if A is skewsym then so's -A
A + (-A) = 0
you don't even have closure under addition lol
The 0 matrix is skew sym, no?
@main jacinth it's skewsym but it's not nonsingular
Yeah, then let's throw in the 0 matrix to the set
Since the additive identity doesn't need an inverse under the field axioms, we should be fine.
i mean... i'm p sure the sum of two nonsingular matrices in general need not be nonsingular

Wolfram|Alpha brings expert-level knowledge and capabilities to the broadest possible range of people—spanning all professions and education levels.
Wolfram|Alpha brings expert-level knowledge and capabilities to the broadest possible range of people—spanning all professions and education levels.
two invertible skew-symmetric matrices
add them to get something not invertible
so adding 0 is not good enough
im a little unclear on the subspace test
for 2.
when it says for all vectors u,w
why does it choose u,w
isnt there a although a finite amount of vectors in the subset V more than two vectors
what do these two represent
is is suppose to mean that all linear combinations in V are suppose to be an element of V?
What book is this btw?
Kuttler Linear Algebra - a First course
it doesnt even introduce vector spaces until the very end
which makes this challenging
What do you mean "choose u,w"?
in property 2.
it says "i.e. for all u,w"
what is u,w? is that the set of vectors?
"for all"
Meaning you can let u and v be any vector in the space
oh
Very often, there's infinitely many vectors
so for all combination of two vectors
or for all combination of any set of vectors?
Take any two vectors. Add them. You should get another vector
oh ok
V is the vector space. "u ∈ V" means that u is an element of V, which is to say that u is a vector
ah ok
"u + v ∈ V"
Then is saying that u + v is also a vector. We call this "closure under addition" since you can't "leave V" by adding
Hope it helped, this is a complicated topic. Let me know if you need anything else
thank you
yeah this is the hardest chapter so far
for me at least
i dont quite understand the question
so if M has a vector u which is an element of R^4 is M a subspace?
but what does the : sin(u_1) = 1 mean
what sorry that notation is taught in the next section of basis
sin(u_1)=1 is just a condition that all elements in M have to satisfy
No? You can do this question with the subspace test alone @clever cedar
I have no idea how :p
i dont get how to use closed addition when they only gave that one vector in the subset
Yup! Why start with the addition rule? That's rule #2
that one i understood less than
multiplying a vector by 0
this is pathetic how long its taking me to understand
I get it, you've likely never taken set theory, yet they expect you to just know the notation
It's an easy study, take a look at a pdf or some discrete mathematics
oh awesome
But before that, what? "Multiplying a vector by 0"?
isnt the first subspace test
just checking if every vector multiplied by 0
within the vector space?
Nope. Every vector space just contain a zero vector. Any subspace must also have that zero vector
"The zero vector of Rn is in V"
There are 10 axioms that define a vector space. It's a theorem that you only need these 3 to define a subspace in the vector space
This is the "the other 7 come free" theorem
I've done this one for a while. Plus linear algebra is my fav
thats good to hear 😄
ANYWAY, the first test is to check if the zero vector is in the set. Is it?
i believe so
👍
You noticed the problem
sin(0) is not 1
So [0,0,0,0] is not in the set. This set does not contain the zero vector, and it is not a subspace
oh thats less complex than i thought
Cool cool! I'm glad
thank you so much
Np. These are fun! Have any others?
ill keep reading and im sure something will come up
I could use some help
from some of my notes, I have that det(T) = det([T]_B‾B)
but I'm unsure about what B I should be using or what that matrix would be...
there's a simple basis
I feel like this shouldn't be that hard but I'm blocking rn...
consisting of the matrices with a single 1 and all others 0
[ 1 0; 0 0 ]
[ 0 1; 0 0 ]
[ 0 0; 1 0 ]
[ 0 0; 0 1 ]
these are the four matrices i'm talking about
B = the set of those four matrices?
Clever way to think about T. This is why Ann makes the big bucks
sorry if my notation is fucked, I can't LaTeX
$[T]_B^B$
Ann:
Can you make a matrix that does that action for you?
so [T]_B‾B = (1 3; 2 4)?
I'm sorry, I don't quite understand this section :/ so things are a bit shaky for me here
Like, if you multiplied a matrix by the vector
[B1]
[B2]
[B3]
[B4]
You want it to return
[B1]
[B3]
[B2]
[B4]
One might say we're permuting the values
Np, cool question
so this problem actually has it for Mnxn, for n = 1,2,3,4
and while I can do the same thing and get the result for 3 and 4, things get kinda hairy and real big quick and I feel like there has to be a better simpler method that I'm not seeing here? at least for the bigger ones?
the matrix of T would be fucking 16x16 for n=4, they can't be expecting me to write out that whole thing....
{kind=link}

I think
Two of the dimensions are just the regular x and y
So the other three are for r,g and b
but x and y extend to positive and negative infinity
but the rgb are only from 0 to 255
I'm guessing I should represent them also with axes that extend to plus minus infinity, and define the color to be the remainder of the modulus of the number when divided by 256?
Is that a valid way?
what does the semi colon mean
does it mean R^4 is constrained to the condition a - b = d - c?
Yes
sick
All vectors in R^4 such that the equality is true
thank you so much !!1
Np
If a function is defined on all of R and fulfills f(s+t)=f(t)+f(s) is it linear?
My stats book claims that's the case
yes
bumping my previous problem
do you disagree? @uncut forge
I think I have it figured out, but I feel like my "proof" isn't really strong enough.
you also need f(at) = af(t) right? but that follows from above since you are over R
well you just need to show that equality holds right?
I really didn't feel like I was supposed to write out a 16x16 matrix lol
consider if i have f(at) = f(t) + f((a-1) t)
well actually this kinda gets
tricky
Yeah
if a-1 is non integer
Works nicely for integers
Scroll up a bit to my previous messages (not that far up)
you want to find the determinant of the transpose operator?
yea
do you know the permutation representation
for Mnxn with n=1,2,3,4
How they're related? Not really....
I mean, you might say something and I might be like "oh, yea that makes sense" but I don't know
ok lemme see
yes
you're right
you basically are using permutation representation
your permutation matrix is the matrix of the transpose operator?
I didn't end up with that exponent tho
your idea is right
I was just using (-1)^n
shit that's so obvious
I even have the det = 1 for that case
how did you get that exponent
well we have n fixed elements
which is the diagonal right?
so we have to permute n^2 - n elements
but each permutation works for 2 elements so we divide by 2
like if we swap an element in a_(1,3) to a_(3,1) we swapped two elements
right
so we do (n^2-n)/2 swaps
okay, wait where is the n^2 - n specifically coming from
wait
-n because diagonal
n^2 because.....?
we have n^2 elements in our matrix
n^2 - n gives us the non diagonal elements
btw the matrix you had with all the 1's
is a permutation mtarix
determinants are related to permutations
it helps a lot if you understand it
@jagged saffron did you have any idea how to show f(at)=af(t) for non-integers?
can you show me the exact problem
gotcha
The exact problem has nothing to do with linear algebra
im 99% sure if we make sure our function is continuous
we are done

Mathematics Stack Exchange
The following problem is from Golan's linear algebra book. I have posted a solution in the comments.
Problem: Let $f(x):\mathbb{R}\rightarrow \mathbb{R}$ be a continuous function satisfying $f(x+y...
yea it does
otherwise it does not necessarily hold