#linear-algebra
2 messages · Page 33 of 1
You could just find values of a, b, c such that p(a) + p(b) = p(c) or something
they're individually squared so it won't affect it, we can't negate the results of others
p(a), p(b), and p(c) at most 2 are 0, one is nonzero
Yea
And beacuse at most 2 are 0, and one is non-zero, we find that <p, p> = 0 if and only if that last non-zero value of c is actually the 0 vector in p^2
Right?
well the only way we can get p(a)=p(b)=p(c) for a!=b!=c is if p(x)=0
Yea
so yeah that looks good
Good sums resources for linear algebra?
Can anyone send a couple at a high school level
linear algebra done right
no
u
If A direct sum B = E
And A direct sum C = E
Does it mean B=C?
Sorry. E is a finite dimensional vector space.
A,B,C subspaces
I mean equality of the vector spaces
I mean I think it's correct but the problem is that it's making me question another thing related to projections. So I'm all confused right now
why do you think it's correct
Lmao I don't know why I thought it was correct
Yeh you just consider any other basis element and it becomes direct sum
Yeah
I am a little confused
What is this channel meant for
Since queries are supposed to be asked on the questions channel
so you have multiple channels to spam when it's 2 in the morning
how do i check if two lines in parametric form intersect each other in three dimensions?
Check if there's a value of t that gives the same x,y,z values on both lines
@sullen cradle
Thanks
Assuming you did your math right, having less leading numbers than number of equations means there will be infinitely many solutions
In general, any system of n (linear) equations with m variables (m>n) will have infinitely many solutions.
It makes sense if you think about it, if you have 3 equations with 3 variables and none of them are linearly dependant, then you can solve the system of equations to get an unique value for each variable
ok
how come the book can calculate the basis with odd numbers like that?
A1m is just A1 but adding a row [1 0 0 0 0] at the bottom
similar for A2m
I tried to calculate basis but the result is only basis with 0, 1 elements
not weird numbers like that
any idea?
hmm
context, what's the 4-to-1 Dickson converter?
@steady sun
Maybe they used a CAS
(Computer algebra system)
Could be that they found an orthogonal basis?
Not sure
4-to-1 Dickson converter is just a circuit
not really related to this
The matrix A1m and A2m are created above from A1 and A2 by adding a row [1 0 0 0 0] at the bottom
I do suspect CAS though
but idk unless I see the circuit and what sort of weird numbers it uses
well you're right
they used orthogonal basis
do you know about circuit?
if you are I will send you
Quick question, is the integral operator linear? I'm trying to see if the dimension theorem applies to an indefinite integral transform.
I've heard that it's not a linear operator on reddit but I'm unsure if that's true
What's the definition of a linear operator?
Yeah, that
I'm just worried about the constant it makes at the end
Splits over sums and scalars
So what would the null space be?
Setting the integral to zero yeilds that the constant should be 0 so is it the zero vector only?
Oh fuq, my bad. Good counter example, the integral is not a linear operator
Well, the indefinite integral isn't
yee
Definite integrals are
First answer here puts it really well https://math.stackexchange.com/questions/1069664/is-indefinite-integration-non-linear

Mathematics Stack Exchange
Let us consider this small problem:
$$
\int0;dx = 0\cdot\int1;dx = 0\cdot(x+c) = 0
\tag1
$$
$$
\frac{dc}{dx} = 0 \qquad\iff\qquad
\int 0;dx = c, \qquad\forall c\in\mathbb{R}
\tag2
$$
These are ...
I tried to ask this question in #help-8, but no one replied. can you help me with it?
I need to find quadratic form tr(A^2) in canonical form
maybe im doing something wrong, but i've got the formula for tr(A^2)
$\sum_{i,j=1}^{n}{a_{ij}a_{ji}}$
but if it is quadratic form, then we should take sum with i <= j
ppnk:
then the matrix of a quadratic form will be just ones in each entry
it seems to me that I am misinterpreting something
For this do we just have to show that the second term in the equation is in $U^\perp$ ?
Victoria:
is this the correct solution? I'm doing a similar problem but can't get the right answer...
i mean especially this formula |n*PQ|/| |n| |
nvm, forgot how to do cross product properly :3
A matrix m x n with real coefficients can be considered a linear mapping from R^n to R^m right
err
this is called a matrix transformation on A
or something
I have a bit of a dumb question, in the Linear Algebra text i'm working through one has to show that $\text{show that if the columns of B are linearly dependent, then so are the columns of } AB$
Zophike1:
What does linear dependence mean @dreamy depot
@wintry steppe A set of vectors is linearly depdent if and only if $x_{1}v_{p} + \cdot \cdot \cdot \cdot x_{p}v_{p} = 0$ where $x_{1}, ..... , x_{n}$ are aributary weights. I see that the defintion could be used to prove this I was going to ask if it would be perssimble to compute the determinant to conclude $AB$ is linear dependent since $det(AB) = 0$ but it seems that result would only work if $AB$ are square matrices
Zophike1:
You're correct
Yeah 😦 I wish the $det(A) = 0$ didn't just apply to square matrices alone 😢
Zophike1:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
I think the simplest way is just noting that bx = 0 for a nonzero x.
Ahhh ok I was just overthinking it
need helpl!
my reasoning:
since u + v + w = 0, the 3 must be on same plane
thus their cross product will be the same normal vector because they all reside on the same plane
but how do i prove that ?
Are they linearly dependent? @blissful vault
i wish i had a more challenging linear algebra class because it was really easy but i also didn't learn much. at least i have a textbook

Google Books
maybe i'll check that out but linear algebra doesn't seem that interesting on its own
like i get the point of matrices (transformations, linear equations, linear programming, diff eqs) but as a subject on its own it feels kinda dry. those do seem like good problems tho
@dusky tartan are you an engineer
if you're an engineer, read: Linear Algebra done Wrong.
Otherwise: Linear Algebra done Right.
Oh that looks good @wintry steppe :>)
yeah i'd heard of that before i guess i'd look at it
i didn't realize there was a "linear algebra done wrong" book
ahah yeah
its the exact opposite of Axler's
w/ determinants from start to end
meant for engineers
@blissful vault I don't think that's sufficient, since it's false if you scale w by 2, even though they'll still be on the same plane
Try proving u × v = v × w by writing w in terms of u and v
Your geometric intuition is right, there's just more to say about the magnitude of the normal, I think
how to prove $\det(A-A^T) \ge 0$?
Nguyễn Thành Trung:
hm... I got det(A-A^T) = 0 when n is odd
but for n is even
:/ how could det(A-A^T) >= 0 :?
not sure, but I'd try to use the diagonal being 0 and upper triangular part being the negative of the bottom triangular part, maybe try some kind of induction on the dimension
I think this is called the pfaffian if you feel like googling around for ideas
A has to be a square matrix here
so here we are dealing with an antisymmetric matrix
yup
Hmm
det(A-A^T)=det(A^T-A), because the determinant of the transpose is the same..., so that's how you did for n x n matrices when n odd
Let's say n even, then we can split it into 4 equal square matrices.
A B
B^T C
where A, C are antisymmetric...
$(A-A^T)^T = (A^T-A) = -(A-A^T) => det(A-A^T) = 0$
Nguyễn Thành Trung:
that works when n is odd
I think I might have a way
consider the determinant as being the sum of all the different ways of picking one element from each row and column with sign
now the only terms in our sum that can be nonzero are ones where they have different indices
since diagonal terms are 0
so if you look at, say a product of entries, you'll see a generic term in it like a_{ij}
each product of entries corresponds to one with all the entries reversed a_{ji}
so if they're opposite signs, they cancel to 0
if they're the same sign they add together
hmm let's see
no that's not restrictive enough, although each product of elements has an even number in it, that's not enough to force them to be all squares
or wait, is it, because the term with all the reversed indices will end up also sign cancelling with the sign of the permutation, yeah that will work
needs to be cleaned up to be more presentable but I think that should work
Victoria:
Because if we have a transformation $T : R^n \xrightarrow{} R^m$ then |Mat(T)| = $n x m$
Victoria:
I know i just have to use rank nullity for this but im not sure what to use for the where dim(im(t)) = r and i need to find dim(ker(t))
I understand that but what are the dimensions of each vs?
the "vectors" are matrices
I thought it was $n^2$ but the way we define transformations as matrices is making me confused
Victoria:
ok so rank nullity says, for a transformation from v to w, that $dim(W) = dim(Im(T)) + dim(ker(T))$
Victoria:
what is dim w in this case? n^2?
yeah the domain and codomain are of dimensions n^2
hi
if I have a matrix A of size m x n
and I vector x of size n x 1
and the equation Ax = 0
is there a theory to know the number of basis for the nullspace A?
also the size of basis?
"number of basis"?
like how many of basis vectors in a set
then what do you mean by "size of basis"
like this one
I mean the set has 3 vectors in a basis
and each vector in this basis has a size of 6x1
how can I determine that for a general case?
the nullspace of an m×n matrix A is by definition a subspace of R^n... so whatever vectors are in there will obviously be n×1
Yeah, that makes sense
how about the other question?
Like in the image, there is 3 vectors in a basis
how to determine this number in general?
If these are real vectors, you can put them into a matrix then row reduce the matrix. Any column without a pivot represents a vector you should remove from the set. After removing, you have a set of independent vectors
@steady sun
You may have to get creative if they're not real vectors
what's a pivot?
It's a column that only has a 1 after reduction
It looks like they reduced the vectors in your picture
What does it mean to reduce a matrix?
You've definitely done row reduction before, maybe you didn't call it that?
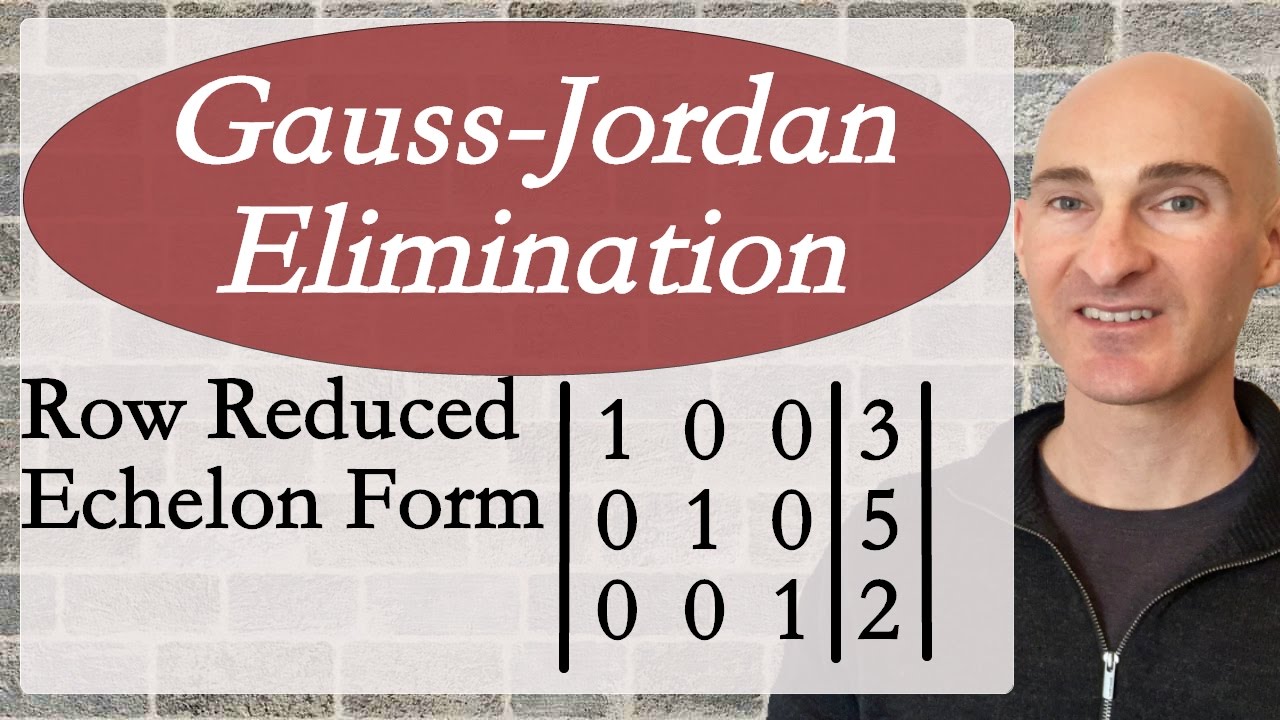
Row Reduced Echelon Form ring any bells?
nope, I don't know English terms for math
maybe I can help about the language, what language do you speak ?
vietnamese
but I'm watching a video now
I think I can search from the term
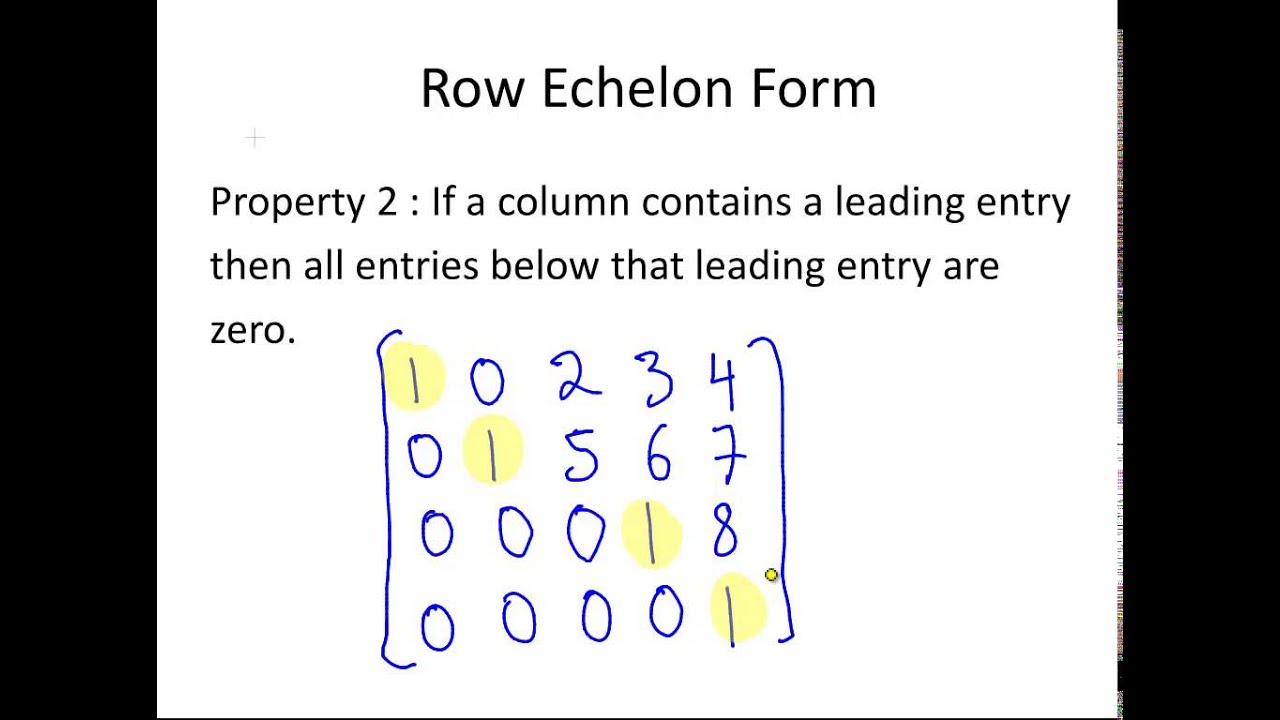
Learn how to use Gauss-Jordan Elimination row reduced echelon form to solve systems of equations in this free math video tutorial by Mario's Math Tutoring. 0...
sorry I don't know vietnamese
@steady sun I'm Vietnamese. I think you can use the rank nullity formula
It's basically : matrix rank + dimension of null space ( what you are asking for) = number of columns in the matrix
To find matrix rank you can use the Gaussian elimination as others said
Thank you! I have just read that too.
Oops, I learned Gaussian elimination at school
but never heard Row Reduced Echelon Form
Row reduced echelon form means " dạng bậc thang ở hàng"
If you look at an example of row reduced echolon form u will immediately understand
pm me if you have any question ; )
Thanks!!! I googled that terms and found a good video.
https://www.youtube.com/watch?v=biW3S9EdE4w
MathsResource.Github.io | Linear Algebra | Matrices
Yes, then you count the number of pivots ( number of ones in this case ), that's the matrix rank
I have a query
If we do row transformations then it is said that it is now forbidden to do Column transformations on that same matrix subsequently
Why is this so
with elementary matrices?
row and column transformations corresponds to multiplying by matrices on the left or right
if you're thinking about gaussian elimination, try to think about the corresponding system of equations
you'd be trying to cancel different variables out, doesn't make sense to do that
3x+2y=7
5x+4y=9
I can subtract a multiple of the first equation from the second
but I can't take the vertical columns of coefficients on the x and correspondingly subtract those from the corresponding coefficients on the y, that would be a kind of column operation
Does anyone have any good resources for understanding tensor products and the universal property? I'm feeling completely lost
Dumb question but woudn't one be able to prove this via the Row Colulum rule ?

@wintry steppe Yup. First apply the inverse to your product of matrices. This gives 1/5D^(-1)AC = B
I think it's straight forward from there?
OH
okay i get it
yeah i forgot to put the inverse on the 5
thank you

same thing with this, how does it equal to g?
@wintry steppe What have you tried?
@clear otter was my proof idea right ?
@clear otter so far i have made the A^6 to A^5 but what confuses is me what to do with the 3I
How did you make A^6 to A^5?
cuz the inversenwould reduce it
by -1
and oh i think i got it
cuz A would be the matrix so (A^6) ^-1 then add by an identity matrix of 6 and multiply by 1/3
i think
You're multiplying everything by A^-1
put the equation into the form $A[\text{something}] = I$
Sadly Lachrymose:
or $[\text{something}]A = I$
Sadly Lachrymose:
A^6 - 6A + 3I = 0
Multiply both sides by A', doesn't matter if on left or right
A^5 - 6I + 3A' = 0
A' = 2I - 1/3 A^5
oh okay
hi! is this where i can ask questions for MAT223?
What is MAT223?
linear algebra
LOL
idk i was thinking there were like different versions/courses or another channel to ask questions
This is the linear algebra channel
so to determine if it's invertible, i need to find the determinant first right?
and i did this
when i'm doing row operations to find a determinant, can i switch rows around
also not sure if i'm even doing it right or not
are you allowed to compute determinants using cofactor expansion?
You can also row reduce it, and see if you get identity
idk i was doing it during the tutorial and my TA was giving me shit cuz it was taking so long
The determinant of a 4×4? I mean that's not a short process
but moving rows around is ok right?
yes, that's what i mean by cofactor expansion
you can also use row ops to get the determinant, but remember what effect row ops have on the resulting matrix
oki
Yes, swapping two rows does not change the det
Adding/Subtracting rows doesn't change it either
multiplying a row through by a constant scales up the determinant by the same constant
oh riight ok
and also, i really don't understand how to find the inverse of a 4x4 matrix
i kind of get it for a 2x2 but not for this
Same as any other. If you are going to find the determinant, you mineswell find the adjacent
Sorry, adjugate matrix
RokettoJanpu:
i think i get it, thank you!
I'm not sure how to prove b and c
I believe theyre both true, but idk how to explain it without giving an example
actually it depends for b) cuz there might be 0s in there that makes the determinant = 0
@stoic elm
c is ez. Multiply both sides by A^-2 to get the form you want
There's an easy counter example for b
both sides as in it'll become A = A^(-2)?
wait nevermind i was being dumb and looked at the wrong one
c make sense?
nvm i thought i got it but i still don't :/
A³ = A
A³A⁻² = AA⁻²
A = A⁻¹
worry not
meanwhile i have a question lmao
so while looking through this problem i can't really see how the dimensions of a matrix for this transformation would work, given it needs to be 3x2, but a 3x2 matrix multiplied by a 2x2 matrix gives a 3x2 matrix which is not the 3x1 vector wanted as an output
i suspect i'm fundamentally misunderstanding something about this type of problem
@stoic elm
And like I said, there's a very easy counter example for b. Don't over think it
You can also solve the equation by factoring to get a counter example
not really sure how to do it by factoring, but is one of the easy counter examples you were thinking about this?:
That works! I was thinking even easier
all 0s?
Yup lol
Np, let me know if you got anything else
and sorry @feral grove i;m like spamming your question away T_T
ty! i think i'm good with everything else
np i shouldn't have asked
i thought you were done
which is mb
i forget about the other question
@feral grove
I feel like T would have to multiply on the other side. A 3×2 times a 2×2
i mean we've dealt with them as vector spaces before, but i've never had a transformation from or to it
my guess was just a 3x4 that's (T(E_11) T(E_12) T(E_21) T(E_22)) but that's 3x4 so i don't really know what the meaning of it would be
The problem is that the output is 3×1 and that's neither of the input's 2×2, and you necessarily have to keep one of them
Is it okay to write it as a 4×1 instead?
oh wait
i think i can decompose some A=({a,b}{c,d}} into coordinates as 4x1 and then multiply it by the 3x4 matrix
i'm guessing at least
yeah
ok
that's gotta be it
Depends what your teacher wants
Makes me think that, in the form it is written, this isn't really a linear operation
Idun
i mean i think the idea is we can treat M_2x2 as R^4 since any A in M_2x2 can be written in terms of basis matrices multiplied by the entries of A as scalars, and then those scalars become a vector in R^4
i hope
Say we have some matrix, call it A, which is the matrix representation of the transformation $T : R^n \xrightarrow{} R^n$ with rank R.
Victoria:
Then, we apply this matrix, A to a new transformation, call it $F : Mat_{n x n} \xrightarrow{} Mat_{n x n}$, defined by $F(B) = AB$
Victoria:
Since the kernel of T is R, is the kernel of F N^2 - N*R?
Since the image of T has a basis, some $v_1..v_r$, which we can then extend to NR number of basis, because we now have n more columns
Victoria:
and then by rank nullity we have our answer?
So if I can find the inverse by basically doing row operations while on the other side I have an identity matrix, then doing it again should give me the original matrix right?
Or to put it another way does (A^-1)^-1 work?
yes
Nice
How would I prove that
Also, what is the mindset in I should have in order to solve proofs
How should I approach a question where I need to prove something
I'm doing question i)! Can I find the determinant of a 4x4 matrix using row reduction?
or do I do the ijk thing that people do with vectors
can I do that? crossing out one row and one column gives me a 3x3 and I don't know how to do that thing for a 3x3
im pretty sure you do the crossing out thing
let me find my old notes
ok
for the first question
acutally
i think a video might help, explanation of this would be long

Use expansion of cofactors to calculate the determinant of a 4X4 matrix.
after you watch the video though, try your homework problem out
we can work through your problem if the video doesnt help
@leaden fiber cofactor expansion and row operations are both fine ways of computing the determinant
this video explains well
ahh okay I'll go watch!!
galileo linked you a video on how to do it with cofactor expansion
OH
are you required to use a particular method of computing the det?
you can do row operations
isnt it you multiply diagonal of rref @gray dust
is that what you mean by row operations
you do your best to reduce the matrix down to the identity. and keep in mind the effect that row ops have on the determinant of the resulting matrix
oh yeah
nope, not required to do any method
both methods take some time to do
eh, depends whether you're faster at row ops or taking determinants of minor matrices
i think cofactor expansion would help him when learning eigenvalues
ping if you would like me to walk you through it
cool! its a lot of steps so take your time 😄
if it's your first time computing det with cofactor expansion, you may want to try it out with a smaller sized matrix first
Like this right?
,rotate
sorry haha
yeet tysm!!
👍🏽
!!
are you iterating over the 4th column?
third row
oh my, lots of computing you don't have to do. nice
most of the time you will not be as lucky 
an invertible matrix is a matrix whose inverse exists
there can be matrixes which don't have inverses??
mhmm
^^
galileo I thought you were gonna sleep!!
ahhh
0 doesn't have an inverse? (oH RIGHT)
any matrix which doesn't have an all-zero row should be invertible, right?
do your notes say anything about determining whether a matrix is invertible?
inverse exists iff the determinant is nonzero
transpose
zz
I saw that!!
It is bed o clock go to bed!!!
I don't have a test until december :P
zz.
tyy!! and good night go to bed
how do I find if something is coplanar? Do I just cross product to find the normal vector of the plane that has two vectors, and then sub the points of the third point in?
waaah I should have listened in class
hmm
Just use simple calculation because this was one of question in midterms exam
a and b real numbers?
Yeah
x is variable
x is matrix?
hmm
where c>0?
hmm
maybe we consider how eigenvectors of X^2 are like
if X is diagonalisable with real eigenvalues, I think we are done.
but the problem is that X might not be
but note that this is a continuous function (in terms of c), so basically, we must show that X^2 has no negative eigenvalues
If X^2 has a negative eigenvalue, -c, then X^2v=-cv for some vector v.
@undone garnet any ideas?
wooop
my proof is
p(x) = x^2 + ax + b = (x+a/2)^2 + b-a^2/4 >= 0
so b-a^2/4 >= 0
let m = b-a^2/4
so
and
P(A) = (A+a/2I)^2 + mI
we need to show that X^2 cannot have a negative eigenvalue
well
no need to do that
let X = (A+a/2I)
so
we need to prove
det(X^2 + mI) >= 0
okay you jumped into complex numbers
???
determinant is a polynomial, so we are done?
det(B.conj(B)) = |det(B)|^2 >= 0
det(A+B).det(A-B) neq 0
M = [A, B; B, A]
prove that det(M) neq 0
A, B is M_2
any idea?
hm..I'm thinking about
M = C.D
in this det(C) = det(A+B), det(D) = det(A-B)
can anyone check my prof for me please?
prob: A, B is M2. A = AB - BA, prove that A^2 = 0
my proof:
from Cayley-Hamilton we have
A^2 = trace(A).A - det(A).I
trace(A) = trace(AB-BA) = trace(AB) - trace(BA) = 0
so
A^2 = -det(A).I
we need to prove det(A) = 0
indeed
A = AB - BA
<=> A^2 = A(AB-BA) = A^2B - ABA
or
<=> A^2 = (AB-BA)A = ABA - BA^2
by add two equations we have
2A^2 = A^2B - BA^2
2(-det(A).I) = A^2B - BA^2
<=> -2det(A).I = A^2B - BA^2
get trace both side
trace(A^2B - BA^2) = trace(A^2B) - trace(BA^2) = 0
trace(-2det(A).I) = -2det(A).2 = -4det(A)
=> -4det(A) = 0 <=> det(A) = 0
so A^2 = 0
I'm not sure I understand the difference between the cartesian product and the direct sum when dealing with modules.
It seems the direct sum of modules has a linear structure where addition is componentwise, and scalar multiplication is on every component.
Does the cartesian product of two modules have no such structure?
Is it literally just a set?
I'm confused exactly what this means
What's the set on which the direct sum of two modules
As in, how do you get the set for the diret sum of two modules
"For two R-modules M and N , M ⊕ N and M × N are the same sets, but M ⊕ N is an
R-module and M × N doesn’t have a module structure."
Is this quoted from something you're reading
Yeah. It's a paper on tensor products by Keith Conrad.
link me to it?
I'm honestly just as confused as you are
phew
I think they want you to describe what happens to a vector when you apply that transformation.
ie, how is it rotated and scaled.
https://gyazo.com/dba34305c984fe31d3738d2f0336cf3f
can someone please explain the step from top right to bottom of the picture?
(I'm not sure if this belongs here)

work it backwards, start from the bottom and distribute that and try to make the thing on the top right
equation signs are reversible, so once you understand how to go backwards use that to teach yourself how to go forwards
@clear otter
One is finitely many modules, the other allows for infinitely many
They are named as such because they do have different properties
I'm not sure if I'm just dumb, but I can't solve this
Show work?
Once you get upper triangular, the determinant is just the product of every term on the diagonal
Is the -2(-1) part wrong
Also 9 wasn't right but I couldn't figure out where I went wrong
You have -2 on the outside and -1 in front of the first 2x2 det
Multiply those constants, the outside should be 2 but you wrote -2
Ooh
Oh I finally found out what I did wrong, it was that and some other copying issues I did 😭
Guess I'll just use this instead of row ops if I can, idk why I couldn't get it with row ops
@stoic elm
The first thing you did was divide a row by 2. That will half the determinant. You have to remember to double to get the original determinant
Oh what I need to do that?
Oh true I guess I did tamper with the result
Also sorry, one more problem
How would I find the matrix using the third column?
You mean how to iterate over column 3 when computing detA?
The hint is asking you to do basically what you did for the last q. Cofactors expansion
I used the first row to do that, is there a way to use the third column the same way
Wait NVM there's the second row that could do basically the same thing
Notice for each minor matrix you alternated between multiplying it by 1 and -1?
Oh yeah
For any element sitting in the i’th row and the j’th column, you multiply the det of its minor matrix by (-1)^(i+j)
I dont know how to go about 2.5
I just know that the dot product of the vector and normal vectore should be 0
but im dealing with 1 vector orthogonal to both equations and im not sure how to set it up
wait do I just take the cross product of the two vectors in R4
there's no cross product for vectors in R4, I think
Just take the standard basis and find a orthogonal basis of the span of x1, x2, and then subtract the vectors parallel to these basis vectors
@native ore
oh
wait so cross product only works for vectors up to r3?
Cant I solve this using row reduction
Do product?
I know dot product works but how do I setup a dot product system
for both vectors
how do the components of an orthogonal vector look like?
@native ore
row reduction?
what does it look like?
its just a vector thats perpendicular to the given vectors
All orthogonal vectors in would be a plane thats orthogonal to the plane created by those 2 vectors
you need v dot x1 = v dot x2 = 0 @native ore
I had a question on the midterm that blindsided me and I'd like to know how to solve it
The matrix is 5X3
The question was basically to find a solution to b
ah
you have a1, a2, a3 column vectors
express the matrix multiplication in terms of those column vectors
@toxic pendant
because maybe you haven't seen matrix multiplication expressed in terms of column vectors

But this concept is simple, I just couldn't connect it in my head for the 15 minutes I sat there
I slep about 8 hours as well
I cant afford to sleep
I dont know enough
im going through the whole textbook
I've already got my large double double from tim hortons
Your midterm is the entire textbook?
im actually gonna get tilted
starbucks pretty shit too
mccafe is probably the best "regular" coffee
So same as me
??? where do you go
Anyways there are studies showing that having proper sleep outweighs cramming for a few extra hours
there's a specialty coffee place next to where I live that has some high quality coffee, also my friend worked at a high end coffee company factory
and he hooked me up with a lot of good coffee beans
and so I just make my own from that
Especially since there are extreme diminishing returns when doing it all in one session
well as much as I'd like to agree with those studies, I've been focusing so much on my other math course
I'm missing a lot of fundamental concepts
plus my exam is in the late afternoon tomorrow
I mean how many hours until it happens
I never prioritize studying over sleep
so I can get some sleep after
the exam is in 20 hours from now
Sleep 8 study 10
sure but I have the drive to study now
so I study now sleep 8 later
im so groggy when I wake up in the morning
I get nothing done
Sleep at your regular time to not disrupt circadian rhythm
I'd go over and write down the key concepts
I will sleep
And then sleep on them
Then do questions when I wake up
Then again this is coming from the person who just epik failed on an easy question
we'll see I guess
my goal is literally
70%
some dude on discord who is writing the same exam just asked me what R2, and R3 is
so at least I know im not the most behind
Hrm
Given some liner mapping T:R^n->R^n and a basis B that spans R^n such that B = {v_1...v_n}, is it true that ([T]_B)(v) = T(v)?
I think that it's true
Like i'm using this as part of my proof
For this question
What do you mean by ([T]_B)(v)?
Wikipedia has some nice for that fact
*proof
Since T preserves the inner product, it preserves vector length. For an orthonomal base, we have that vector length = v transpose * v
So we have: v transpose * v = (Tv)^transpose * (Tv)
Open the bracket and from there you have T transpose * T = Identity, or T is orthogonal
it seems like v1...vn are doing nothing
select the standard basis, then you get information about the columns of T
then pick something else
$(Tv)^TTw=v^Tw$
Element118:
so $v^TT^TTw=v^Tw$
Element118:
Since this is true for all v and w
by choosing standard basis for w, we can show $v^TT^TT=v^T$
Element118:
If a linear subspace is invariant under every operator, does that mean the subspace must be trivial? (the zero space and the whole space)
No, some linear operators are not bijective. The zero map will take the whole space to 0 @remote fable
Hrm
Wait
THat's not quite what I want
If I rewrite v and w in terms of a basis B, is the dot product preserved?
@remote fable what wikipedia page?
Like my thought process for this question is that if we have some linear mapping T:R^n->R^n, then the matrix for this linear mapping with respect to B = {v_1... v_n} would be
[T]_B = [ [T(v_1)]_B ... [T(v_n)]_B ]
So then we have T(v), with respect to base B becomes ([T]_B)(v_B)
As v, w in V and B spans V, then we can rewrite v and w as linear combinations of v_1...v_n
So that v_b = a_1v_1 + ... + a_nv_n, and w_b = w_1v_1 + ... + w_nv_n
Is this ok so far?
Err like
LIke I'm assuming that becaues T(v)T(w) = <v, w> are all in R^n I can just change the basis to B because B spans R^n
Err
Ok nvm that question
Different question
Given this question
I've been able to show that L(v_1)...L(v_n) is a basis for W
But I'm not sure how t oshow orthonormality
@pallid swallow do you have any idea?
Like showing that it's orthonormal means showing that for all i != j, we have L(v_i) dot L(v_j) = 0 and L(v_i) dot L(v_i) = 1
does this question want me to find the a transpose?
THey want you to go and take the transpose of A^T yea
but i dont understand
a transpose would be 4x2
you cant add a 2x4 and 4x2 matrix right
They want you to subtract the 2x4 from the other 2x4
And then to transpose your answer

Yea
Like your question is of the form 2B + A^T = C
Like I dont' want to bother typing out the matrices
So then you can find A^T = blah blah
THen you go and take the transpose of your answer
so 2b - c = -a^t
this one wants me to find a matrix such that
-3B + A = C^T
so find a matrix a that equals the transpose of c when added with b
?
oh
when you switch a matrix over the equals does every digit (element?) get sign flipped
like the same way if you had a integer 2x + 3y = 0 if you move the 2x over it becomes 3y = -2x
for a matrix do i inverse every digit
there's no such thing as "moving something over" or "switching something over"
all i did was add 3B to both sides, plain and simple.
👍🏽
but if you did want to multiply a matrix by -1, yes, each entry would just flip.
I have a question about matrices of transformation
If I want to represent a matrix of a transformation from R3 to R2 A
As mapping from a nonstandard basis in R3 B
Going to a nonstandard basis in R2 C
How would I do that?
wdym
as in
you have a transformation from R^3 to R^2, and you want to write its matrix with respect to your two bases, B and C?
Yes, the transformation matrix is in terms of The standard bases in R3 and R2
uh huh
well the simplest way would be to just go by the definition tbh
Definition?
Where’s that?
are you... saying you don't know how to represent a linear transformation with a matrix
No no I do
like... the columns of your matrix are the coordinate vectors (wrt C) of the images of the vectors in B under your transformation
so like take the first vector in B, apply the transformation to it, write the result as a linear combination of vectors in C, arrange the coefficients in a column, and that's the first col of your matrix
and likewise for the other two
@charred stirrup
Yes
@half ice thank you, I was wondering if they intended me to figure something out through substitution instead
It's very rare that, when given a system, you shouldn't immediately reduce it
In this case, you solve a with the reduction
and use my answer from a to do another reduction in b ye
You can, and that would work. You can also put your solutions from a into the equation
Or is that what you were saying? Oop
why would I evaluate the plane with the answer from a? just trying to conceptually understand what's going on
a will give you a line. This represents all places the two planes intersect
Yup
If you add another plane, you can just find the intersection between that line, and the plane
Rather than (but you still can) finding the intersection between all three planes
by evaluating the plane at that line, I effectively get the point where they intersect?
Yup!
Note they may not intersect at all. The question implies they do though
I really like your note on the fact that it's intersection between all 3 planes
because the line itself is the intersection of the first two planes
thank you
Np. That all you needed? Feel free to ask if there's anything else
is it more preferred to reduce to row echlon form or rref?
Yes, reduce as much as you can. The answer is very clear if you do
It's also common to reduce to upper triangular, then the solution is still very quick, but save that for later in the course
@half ice if you are available, is the direction vector of a line its unit vector?
same question #1
how would you represent the line in general form after you solved the x1, x2, x3 values?
no this is patrick
@native ore 😦
@charred stirrup
For part b? It's not a line at that point
hrm
"Let V be an inner product space with inner product <,>. Prove that <v, 0> = 0 for any v in V"
Isn't this part of the definition of an inner product?
That <v, v> = 0 if and only if v = 0
yes that's part of the defn but no your statement isn't the same as that
Oh
@half ice for part A), I have the x1, x2, and x3 solved, but I cant seem to express the line in parametric vector form
Top row: 1 0 1 | 2
bottom: 0 1 1.5 | -2
my solved x1, x2, x3 respectively is 10/3, 0, and -4/3
@half ice
That's a solution, but it doesn't represent all solutions
If you take your matrix back to an equation form:
x1 + x3 = 2
x2 + 1.5x3 = -2
You can rearrange like so:
x1 = -x3 + 2
x2 = -1.5x3 - 2
This allows you to put in whatever you want for x3, and get a solution (x1, x2, x3)
We say that x3 is a free variable. We can refer to it with a different name to represent this. I'll call it t. Our equations are then:
x1 = 2 - t
x2 = -2 - 1.5t
x3 = t
That's the parametric equation of the line
we have an infinite amount of solutions?
at least 1 free var means infinitely man solns
that is an amazing explanation thank you @half ice
How can I identify the free variable in the future? So that I know to rewrite in terms of the free variable
So in my case, the first 1's in each row were my pivot
but my 3rd column had no pivot
so the entirety of x3 is considered a free variable
?
Yus
If you're deeper into linear algebra there's a bit more to make sense of here. Since there's one free variable, the solutions form a one dimensional space (kinda, the constants break this but it's still worth thinking about this way) if you had two, this would be a two dimensional space, ect
We have a line of solutions, because there's one free variable.
The word you're looking for is coset lol
I have a question about basic linear algebra
- I am having trouble converting a direction vector [1, -4, 7] into a normal vector ( I know the dot product just has to be 0 since they are orthogonal) but my prof said that not any vector that gives 0 when multiplied is orthogonal which confused me.
2)Give an example of a 3×4 coefficient matrix A such that [A|b⃗ ] has a solution for every 3×1 vector b⃗ . Justify your answer.
Literally no clue how to do this
No idea where to even begin
@half ice Could you possibly assist? @quaint heart
in 3D space there is an entire normal plane to a vector
Here is the full question
I was thinking get the direction vector, convert to normal vector and then find the general equation of the line
then solve the system
<@&286206848099549185>
Read the rules in #❓how-to-get-help please
@young pasture
That line can also be written as
x = -2 + t
y = 5 - 4t
z = 1 + 7t
Plug those into your plane, do you get a value for t?
Wait is "t" supposed to be in the point of intersection? I am a little confused sorry
I do understand what you are trying to say tho
I don't understand what you mean by "plugging the values into the plane.
Put x, y, z in. You'll have an equation that only has t
@half ice what does t =
t is a free variable. It can be anything. Any choice of t will give you a new point on the line
That line can also be written as
x = -2 + t
y = 5 - 4t
z = 1 + 7t
Plug those into your plane, do you get a value for t?
If you do have a value for t, then use those equations above to get an (x,y,z). That's the intersection

{kind=link}
@arctic fox join the club bro
how would you justify that answer? How did you derive that answer?
Let's say you have the block matrix
1 0 0 0 | a
0 1 0 0 | b
0 0 1 0 | c
What's the solution to the system?
[a,b,c]
No!
It's (a,b,c,t)
Where t is whatever you want it to be.
There's infinitely many solutions, but that's always true for any vector b in the block
ahh makes sense, thank you!
Np, feel free to ask if you have anything else
@half ice your a legend. Thanks bro
I found x1 = -5, x2 = 6, x3= -1, but how do I create the vector equation x = p+td ?
i feel like I am missing out a big part of understanding by not being aware of the significance of solving the system
okay nvm I got it the significance of the solved values produces a point that exists in the system
then I just grab the direction vector and sum it
anyone kno how to use matlab?
if so, how do i get a proportional value out of a list
so like lets say there is average temp and i extract all the days temp was less than 22 how would i find the proportion after extracting
i just tried getting the sum of the total each.. so the sum of the list and the sum of the extraction \
and dividing it
it didnt work..
alright and whats v?
the list
oh okay
if it is stored in a vector
finally found you again
yeah, the problem is we need to find the correct functions
sum((int)(v<22))/size(v)
might be this
it says: error: 'int' undefined near line 1 column 6
@pallid swallow leave that for now
can u help me with this can u tellme what i have to modify in order for it to work for a cubic
xi=[-1:2]'
yi=[4 0 8 1 5]'
A=[xi.^2 xi ones(3,1)]
b=yi
x=A\b
f = @(t) x(1)*t.^2+x(2)*t+x(3);
t = 0.5:.01:3.5;
y = f(t);
hmm
can equation like this
ax3 + bx2 + cx + d
and find a b c d by given points which i alrdy inserted
yea
Hey all, any tips on how i can better understand how to go about solving linear algebra proofs? Or a resource/book with a lot of proof examples
this
@leaden ermine depends, any examples
its a quadratic one but i wanna change it into cubic
acc wait no
xi=[1:3]'
yi=[3 5 -1]'
A=[xi.^2 xi ones(3,1)]
b=yi
x=A\b
f = @(t) x(1)*t.^2+x(2)*t+x(3);
t = 0.5:.01:3.5;
y = f(t);
thats the quadratic one ^ and i wanna turn into cubic
and still an error @pallid swallow Ȁerror: operator /: nonconformant arguments (op1 is 1x1, op
2 is 1x2)
Hmm, I guess basic proofs for LA, so nothing super complex but proving maybe here are some
@wintry steppe sum(double(v<22))/size(v, 1)?
@leaden ermine which do you want to look into
nvm i figured it out
i had to do this
count= sum(x < 50) and then ratio = count / numel(x)
well I am looking more for help on the mentality on how to approach these kinds of questions. I cant seem to really understand proofs no matter what i read. I know the linear algebra (Decently) but i get stumped on "Show this" or "Prove this"
@pallid swallow do u know how to turn the equation into a cubic?
which equation?
@leaden ermine Hmm, okay, firstly, maybe you can try some examples
this
if you can try some examples, you get a feel for the mechanics for the question
xi=[-1:2]'
yi=[4 0 8 1 5]'
A=[xi.^3 xi ones(2,-1)]
b=yi
x=A\b
f = @(t) x(-1)*t.^3+x(0)*t.^2+x(1)*t + x(2);
t = 0.5:.01:3.5;
y = f(t);
plot(t,y,xi,yi,'o','MarkerSize',5,'MarkerFaceColor','black')
use that method
and modify it to solve for
y = ax^3 + bx^2 + cx + d
you want to solve equations by plotting?
yea
Well so for example, let me take a really easy one.
ill wait till youre done with unknown
@wintry steppe might want to bound where your root is
dont wanna interrupt
@leaden ermine if you want you can move to a #❓how-to-get-help channel
well i have been only given these points: (-1, 4), (0, 8), (1, 1), and (2, 5).
and i need to find a b c d
its ok, ill wait, im in no rush
yeah and
@leaden ermine Okay, so, what do you think of your question?
i gotta plot those points into this and turn this quadratic one into cubic
xi=[1:3]'
yi=[3 5 -1]'
A=[xi.^2 xi ones(3,1)]
b=yi
x=A\b
f = @(t) x(1)*t.^2+x(2)*t+x(3);
t = 0.5:.01:3.5;
y = f(t);
but idk how to
how do i turn it so uses qubic
oh you are solving a linear system to find the coefficients