#linear-algebra
2 messages · Page 30 of 1
for
[1 h | 2]
[0 8-4h | k-8]
Choose h and k such that it has one solution
why should k != 2 and h != 8
It's always the same process.
- Pick the left most "unrrefed" column
- Divide every row by whatever that entry is, so that the entire column is 0 or 1
- Subtract to have 0s everywhere except the pivot
yeah i k
but the h is whats confusing me
how do i make h zero
in row 1 column 2
So you want to divide first, as I mentioned
Divide as such:
[1/h 1 | 2/h ]
[ 0 1 | (k - 8)/(8 - 4h)]
Subtract top row from bottom:
[1/h 0 | 2/h - (k - 8)/(8 - 4h)]
[ 0 1 | (k - 8)/(8 - 4h) ]
Or, bottom row from top, sorry
Then multiply the top row by h
It's clear that 8 - 4h = 0 causes a division by 0, so that can't be the case
What's R1, R2?
Know how I got here?
[1/h 0 | 2/h - (k - 8)/(8 - 4h)]
[ 0 1 | (k - 8)/(8 - 4h) ]
no
Know how I got here?
[1/h 1 | 2/h ]
[ 0 1 | (k - 8)/(8 - 4h)]
Know how I got here?
[1/h 0 | 2/h - (k - 8)/(8 - 4h)]
[ 0 1 | (k - 8)/(8 - 4h) ]
sorry yes
i do
but wait
no sorry
Know how I got here?
[1/h 1 | 2/h ]
[ 0 1 | (k - 8)/(8 - 4h)]
this i know
but i got lost after this
If the system is larger, you can always do those steps, it will always rref columns
should we divide row 1 by 1/h now?
Then, we can multiply R1 by h and we're done
I was about to say, where'd you get 3 from lol
[1 0 | 2 - h(k - 8)/(8 - 4h)]
[0 1 | (k - 8)/(8 - 4h) ]
so R1 *h?
Yeah, you can always multiply by a scalar
i dont know what a scalar is
Remember, these are systems of equations, we're just not writing out the variables. Anything you can do in a system, you can do here
Scalar being any constant in this case
ok
wait should't the rhs be 3-h(k - 8)/(8 - 4h) not 2-h(k - 8)/(8 - 4h)
cause you did 3h/h
I didn't anywhere?
what did you have before this
[1 0 | 2 - h(k - 8)/(8 - 4h)]
[0 1 | (k - 8)/(8 - 4h) ]
im falling behind lol
Divide as such:
[1/h 1 | 2/h ]
[ 0 1 | (k - 8)/(8 - 4h)]
Subtract bottom from top:
[1/h 0 | 2/h - (k - 8)/(8 - 4h)]
[ 0 1 | (k - 8)/(8 - 4h) ]
Multiply by h:
[1 0 | 2 - h(k - 8)/(8 - 4h)]
[0 1 | (k - 8)/(8 - 4h) ]
ok
i accidently wrote 3 instead of 2
so i fixed itn ow
now
okay so h != 2
but what about k
i dont understand why k != 8
I don't either lol
yeah
"one solution" doesn't depend on k, which is something you can very quickly check once you know what the determinant is
its in my solution
k affects infinite solutions/no solutions, however
Yes. As long as h isn't 2, k can be anything
Np. Feel free to ask if you need anything else!
so
before we turned it into RREF
i was kinda skeptical about k != 8
and i thought we only needed h !=2
and i did that by looking at
1 h | 2
0 8-4h | k-8
is that a fine way to come to a conclusion
instead of putting it into RREF
oh
no but what about in general
like if im doing this on my own
wuld it be okay to come to a conclusion just from that matrix
i had a 0 in row 2 column 1
It's generally not clear at all what value works, and I wouldn't try to guess
but i wasn't really guessing
if h != 2 then its always a non zero
which means itll always have 2 pivots
and having all pivots means it has a unique solution
right?
Good point, I see what you're saying
This is a theorem, any (nonzero) upper triangular square matrix has an rref form
You could use that to end the question quickly
i would have to have the rest of the numbers as 0s though right
so i can distinguish the triangle
can you give an example
[5.264 73.58]
[ 0 π ]
Can be reduced to rref
not sure what to do with this question
Because it's upper triangular with no zeroes on the diagonal
Just answered a similar question! Scroll up a bit @wintry steppe
hey i could maybe help with that question now 😎
@north sierra
That means for you, if 8 - 4h is not zero, then you have a unique solution
i understand when it will have one solution/infite/no but how do you calculate the value
Did you scroll up?
yeah
but i don't see an upper triangle in that
example you showed me
[5.264 73.58]
[ 0 π ]
Upper triangular matrix is a matrix with zeroes below the diagonals
Yeah, it's something like that. Mind you, many ref's can't be rref'd
oh so just rref this
oh
I think square is the only difference there?
Hard to keep some of the rref theorems straight lol
lol
@wintry steppe
Ya ya. Rref should give the answer right away. Feel free to ask if you need any help with it. I laid out a general rref method above too
Np. Good luck with it!
1 and not 1 I think
Question: can anyone think of a coordinate-free way to prove the following:
Let V be a 2-dim k-vector space. Suppose that T:V->V is a linear transformation with tr(T)=0. Then tr(T^2) = 2*det(T)
Are you sure it's not -2*det(T)?
Yeah it should be -2*det(T)
Just think about eigenvalues and how they relate to the trace and determinant @scenic acorn
oh shit nevermind
it's not -2*det(T) either
was trying to come up with a nice problem for a class I'm teaching but I'm clearly too sleep-deprived to makes sense
But still interesting is that tr(T)=0 implies that T^2 is in the center GL(V) (as long as T is in GL(V) in the first place, of course). Know a nice argument for that?
What do you mean? I'm pretty sure -2 det(T) is correct? @scenic acorn
Hm that's an interesting fact
Are you still assuming that V is two dimensional?
Okay yeah you're right it is -2det(T)
I swear I'm not usually this bad at LA
and yes I'm pretty sure it fails in every other dimension. For n=1, there is no traceless element of GL(V). For n at least 3 there are easy counterexamples in char 0 and it's probably not hard to write one down for char p, but I haven't tried yet
Using some model theory stuff, I can say there is some n such that it is true over every algebraically closed field of characteristic at least n...but I don't actually want to get my hands dirty rn haha
(and your eigenvalue solution to the first thing I posted is very nice...can't believe I missed it. thanks!)
I'm trash at simplifying equations. I know I need to subtract -1 and find the common denominator, but I'm not sure what to do next
what's the difference between forward phasing and backward phasing
I haven't heard those terms used before but i found something that explains it pretty well anyway http://people.math.aau.dk/~ottosen/MMA2011/rralg.html
lul
so there's this question giving me doubts
TRUE or FALSE:
The pivot positions in a matrix depend on whether row
interchanges are used
i read in my textbook that it does not depend on whether row interchanges are used
so i know it's FALSE
but i would like to know why
aren't the positions moving positions when you use row interchange though
ohh
so the pivot positions are fixed is that what it means
the pivot position not the value it holds
im not exactly sure what it means. If you interchange two pivot rows, then they are not pivot rows anymore (by definition, they have to be the first nonzero entry of their respective row/column)
plus they have to be on the right of the previous pivot right
to make a stair case
1
1
1
wikipedia puts it this way: A pivot position in a matrix, A, is a position in the matrix that corresponds to a row–leading 1 in the reduced row echelon form of A. Since the reduced row echelon form of A is unique, the pivot positions are uniquely determined and do not depend on whether or not row interchanges are performed in the reduction process. Also, the pivot of a row must appear to the right of the pivot in the above row in row echelon form.
i was just gonna copy paste my definition from the text book
ll
lol
A pivot position in a matrix A is a location in A that corresponds to a leading 1
in the reduced echelon form of A. A pivot column is a column of A that contains
a pivot position.
weird that they say reduced echelon form in mine and RREF on wiki
but REF makes sense
i.e. if you know that the rref is unique, then no elementary operation you apply to the matrix will affect its rref
cause pivot positions are formed in REF
but then my book is kind of wrong becuase if a pivot has to be a 1 then it can't be REF because REF doesn't have to have 1
well, the pivot positions are determined in the REF. Depending on the definition of REF, the pivots might not be 1s or whatever.
idk i probably wouldn't dwell too much on that xd
it just gets me when there are inconsistencies on definitions like this
im gonna ask my prof and see what he says
well my True and False question \kind of makes sense after seeing those definitions
so that helped
well, again, there isn't a universally agreed upon def of REF, so that could always be source of confusion
but i still wanna know the true definition of pivot
true
thought math had universal definitions lol
there is a definition for pivot tho. Its the first nonzero entry of a row. Every pivot must appear to the right of the previous (going from top to bottom) according to the elimination algorithm where you kill all of the entries below the pivot
i think that's leading entry
whereas pivot is when the leading entry is a 1?
i asked this question earlier and Kaynex, PHD in Discord said something like that
and my textbook says pivot is a 1
so yeah
lol
weirddd
stuff
oh hm idk I guess that could be.
really the only important thing about it (that I can think of) being a 1 is so that the rref is unique
but like you're right i shouldn't think about it too much
yeah
aight thanks for da help this convo helped me understand that Question
npnp
The pivot points are determined by the leading entry of each row in the echelon form and as such each consecutive pivot point is down and to the left. If an interchange is used on a matrix in echelon form, it would no longer be in echelon form.
just got this answer from a website on my textbook
on the same question
cool, basically what we decided lol
yeah lol
still struggling with this 😫
then you just state the k value and h value for when there is one solution, no solution and infinite solutions
how do you find the values
so for a) one solution
we would need h to be a value such that there are no free variables
what do you mean by free variables
free vairable is when there is no pivot in that column
Does a vector have to have all of its components negative to be opposite of another given vector with same components
so if we make h = 4, it'd have a free variable
yeah
so my answer for a would be h = 4?
no
h = 4 would give it a free variable
which means it will have more than one solution
so to make it have 1 solution we need a non zero
so we can't let h be equal to 4

does =/= mean not equal to?
yes
is that it
wtf i thought this was much more complicated
and c would be h=4 and k = 6?
yeah ur c) is good
and for b) it'd be h =4 and k != 6
cause we can't have 0 + 0 = non zero
b)h=4 and k =/= 6
not 6i
is that the final answer
i think someone else told me i had to RREF the matrix?
yeah someone made me do that too
but i dont think you have to because it's kinda intuitive
ya true might be good for a bigger matrix
but im a noob
same 
probably sleeping now
YES!! feels good to help others!!! 😀
passsing down the knowledge that everyone taught me
can a coefficient matrix ever be inconsistent?
Every matrix is a coefficient matrix
If you view a matrix as a linear transformation, being inconsistent just means that a point is not in the image of A
IE Ax=b has no solutions
how would we figure out if a coefficient matrix is inconsistent then
What I'm trying to say is it's not a matrix property
It's a system of equations property
You can say the equation Ax=b is inconsistent
But not A itself
🤔
It's probably asking if it's surjective
In mathematics and in particular in algebra, a linear or nonlinear system of equations is consistent if there is at least one set of values for the unknowns that satisfies every equation in the system—that is, that when substituted into each of the equations makes each equa...
Yeah, it's asking if the system is consistent
wow this wikipedia looks so nice
Not the matrix
The system is consistent because the matrix is surjective
If the matrix wasn't surjective the system might be consistent or it might not
Does this make sense?
yeah but how do we know if its surjective or not
test
yeah but how do we know if its surjective or not
yeah but how do we know if its surjective or not
maybe not a lin alg question, kinda simple but
if |v| represnts magnitude of vector v then what is the symbol/represnentation of the angle of some vector v?
@north sierra a matrix is surjective whenever there are as many pivot columns as there are rows
in a coefficient matrix right? @slow scroll
yes
@hazy bloom $\frac{\mathbf v}{||\mathbf v||}$ is normalized and represents the direction of v, but it's not clear what you mean by the angle of a vector
Sadly Lachrymose:
like if v=<-1,-1>, angle of v would be -3Pi/4
is there notation for that
@wintry steppe
@north sierra I just realized what I said is exactly the same as saying that every row has a pivot
@hazy bloom how is "the angle" -3pi / 4?
do you mean the angle between that vector and the vector <1, 0>?
oh, yes
I mean you could write <-1, -1> dot <1, 0> = cos (3pi / 4)
I suppose you can also talk about the "argument" of a complex number
i mean i just want some sort of notation since u can do vx as x component, vy as y component, |v| as r componet(polar coords) but theres nothing to show for the angle
but I've never heard about the argument of a vector, probably because it doesn't generalize to other vector spaces
it just seems incomplete to not be able to denote all the components
i guess v hat is thr closet thing i can get to it
x1 x2 x3 x4 work fine
if you're describing a point in spherical coordinates, you can use the letters $(r, \phi, \theta)$
Sadly Lachrymose:
If I have a subspace of R^3 defined as U={(ax, ay, az) : a∈R} for constant x,y,z, then the subspace is clearly 1 dimensional. Would it be correct then to say that the space is R^1? Or is R^1 only the 1-dimensional subspace such that all except possibly one coordinate are zero?
it would not be correct to say that the space is R1. its just a 1D subspace of R3. They are isomorphic tho.
What if we have U1 = {(x,0,0) : x∈R} and U2 = {(0,y,0) : y∈R}? They are clearly not equal, as subspaces of R^3, but can U1 be said to be R^1? Can both of them be said to be R^1?
I don't think either of them can be said to be R1.
The only thing either of those vector spaces have in common with R is that they are one dimensional and that they are vector spaces over R.
But R^1 is a subspace of R^3, so there must be at least one subspace equal to R^1 (which is itself), no? 🤔
its as simple as they are different universes. I cant add 1 to (1,0,0), even if (1,0,0) is part of the space {(x,0,0): x in R}
True
But then how would R^1 be a subspace of R^3
It is, without question
Unless I'm missing something here
I don't see how R1 is a subspace of R3
Wait a sec
Oh ok
I think you are correct
I misremembered what Axler said. He said that all subspaces of R^3 are R^3 itself, {0}, and all planes and lines going through the origin
It didn't mention R^2 or R^1
Just planes or lines
Makes sense now
ah ok.
what is my professor doing?
is there an easier way to check if a linear combination is possible?
Yeah
are they guessing the coefficients?
or there is a set pattern to figure out?
I should follow?
There's a nicer way yeah
Or at least a more algorithmic way
So let's start with w
Let the blanks be c_1, c_2 and c_3
ok
So if you write it out
You'll basically see that you have a system of equations
With 3 variables and 4 equations
your variables are c_1, c_2 and c_3
this will be easier imo
What do you mean by this?
But yeah
Using that idea, you can see why the system might not always be solvable
okay
so i can algebraically show
that I can get -7
but there's no way for me to add to keep it at 1
so for example
-2(1,3) + (1,-1)
to get -1, -7
how should I set up the system?
$\begin{cases} x +y = 1 \ -x + 3y = -7 \end{cases}$
Zopherus:
Well yes
i was so confused
i couldnt sum the two graphs to get (1,-7)
ok so this is my system of equations
ahh
i get it
bless you
hey yall, quick question
i just did a bunch of proofs for my linear algebra class, but it's my first time doing it
so im not sure whether i should include what i did in every step, like do i have to write (addition is commutative) when i move variables around?
There's no hard and fast rule to when you should
But if you're questioning it, you probably should
mmk got it
@charred stirrup sounds good
@gray dust thank you
no need to thank me, you had the right idea from the start 
for 2b) my idea is to find the length between P and Q and then somehow work with pythagoras' theorem
it will be possible for me to find an Isosceles right-angled triangle because i can set both the lengths equal to the length of PQ and solve for the hypotenuse
but i'm not sure if that is acceptable enough
@charred stirrup first choose which two sides form the right angle
yup P to R and Q to R and assign both the lengths to be the length of PQ
plug in pythag and solve for a i get a= 8 or -2
not sure it is the right channel to ask, but here we go:
I can't understand the difference between this:
Alaanor:
Well, $\forall a$ did not restrict $a$ to any mathematical object, $a\in\bbR$ does restrict $a$ to real numbers, but doesn't mention ``for all".
Element118:
@random hollow
but R is basically everything ?
so in this case it's equivalent, i guess. This would have been different if we used an another set
I just can't understand why this \forall exist ? maybe used as a shorthand for a \in R ?
No, a can be a complex number, group, matrix, vector, function
ohh !
operator, linear map, automorphism, probability distribution function
basically anything
ok got it, awesome ! thx :D
for all quantifies over all elements of whatever it is you're working with
$\nabla_x (x^T Ax)$
rrr:
What would you say this is equal to?
I got:
$ = \nabla (x^T Ax) \cdot \Vec{x} = (Ax+A^Tx) \cdot \frac{\Vec{x}}{|\Vec{x}|} $
but that's apparently wrong 😄
doesn't x have to be a unit vector for that to be true
thats why im dividing with |x|
should make it a unit vector, right?
$ = \nabla (x^T Ax) \cdot \frac{\Vec{x}}{|\Vec{x}|} = (Ax+A^Tx) \cdot \frac{\Vec{x}}{|\Vec{x}|} $
rrr:
better 😛
what does that nabla mean here? I've never seen that notation in this context.
it's a gradiant
x^T Ax is supposed to be a function?
my teacher told me i didnt understand the notation so im not the right person to ask 😄
ye
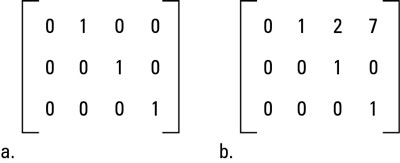
the last few sentences of this paragraph and (1-3) doesn't completely make sense to me. any help would be appreciated :) https://i.imgur.com/8GSr94q.png
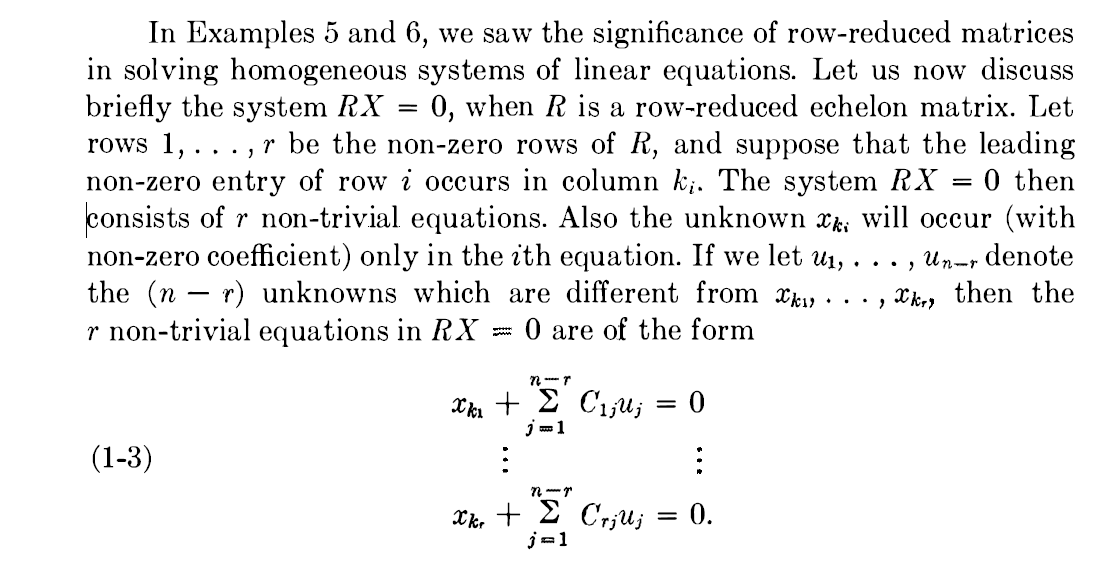
try to write down an example of RX = 0
where R is a row reduced echelon matrix
then write down what the left hand side is when multiplied
its written pretty cryptic but it will make sense to you once you do that
@wintry steppe thanks for the response. I'm mainly just confused about "u_1, ..., u_n-r" denoting the (n - r) unknowns
its because you have a known x
and a lot of unknown x
its written in a weird way 😄
known x?
yeah
what
one x equals 0
I'm sorry for being slow but I have no idea what you're saying
yea
yea
2 and 7 and 0 are the C's
and x + summation is because x is multiplied with just factor 1
the u's are just x's
if i understand it correctly
so
the u's are the unknowns that aren't the first non-zero element in row i
they're the ones that come after column k_i
ok that part makes sense now
but in the summation, it's summing from j = 1 to n - r
but n - r is the number of non-zero rows
no i think C's are those elements
but u might be right, thats just how i understood it
but the X gets multiplied with R
and the u's just denote the elements of x
if you multiply it out its easy to see what they mean i think
its just written in such a weird way 😄
at least if i understand it correctly
I think you did
ahh the next page makes more sense
sounds like you had one of those FeelsGood moments 😄
😛
no
u + v is one vector
span{u,v} is a whole plane
this plane happens to contain u + v though
so is u + v a subset of Span{u,v}?
(well it's a plane in this picture, in general it could be a line or a point if u and v aren't independent)
subset isn't quite the right word
it's one element, not a whole set
u + v is a vector
span{u,v} is a whole space full of vectors
u+v is an element of span{u,v}
{u+v} is a subset of span{u,v}
u+v is only a single vector
{u+v} would be a set containing that only vector
it basically fills up the whole 2 dimensional space?
yes
but only if they are linearly independent
1 linearly independent vector -> spans all of a 1-dimensional space
2 linearly independent vectors -> spans all of a 2-dimensional space
3 linearly independent vectors -> spans all of a 3-dimensional space
n linearly independent vectors -> spans all of a n-dimensional space
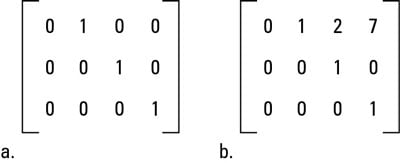
hey I'm back again 👀 https://i.imgur.com/amzAVWC.png
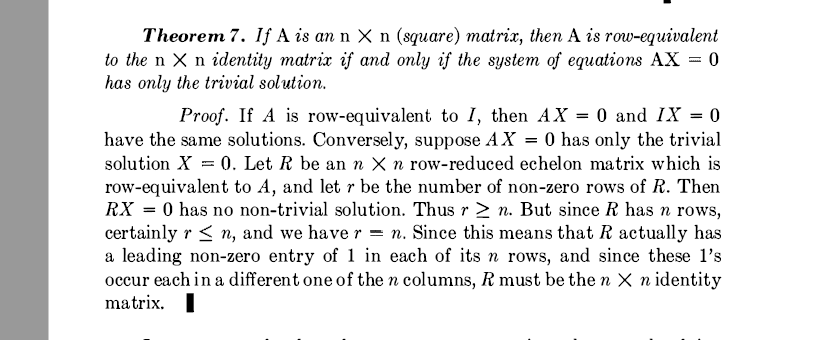
I don't see how R must be the n X n identity matrix because couldn't there be non-zero elements after the leading non-zero element?
if there are non-zero, non-leading coefficients and the columns are linearly independent
then row elimination can get rid of those
and make it into the identity matrix
if not, then that means there's at least one row that's fully 0s
and that means it's not linearly independent
because if theres a leading non zero element in every row, the column its in must be all 0s except for the element itself
yes
is this where i ask for graphing help?
Nop, linear algebra is the study of vector spaces, and linear transformations between them. You're looking for #prealg-and-algebra
just multiply the first matrix by itself
[a b | 1 0]^2 = [(a^2+b) (ab) | (a) (b)]
so a = 2
b = 3
$$
\begin{bmatrix}
a & b \
1 & 0
\end{bmatrix}
\begin{bmatrix}
a & b \
1 & 0
\end{bmatrix}
\begin{bmatrix}
a^2+b & ab \
a & b
\end{bmatrix}
\begin{bmatrix}
7 & 6 \
2 & 3
\end{bmatrix}
$$
nice latex 👍🏽
PorosInMyAshe:
and from the bottom row, it's extremely easy to see that a=2 and b=3
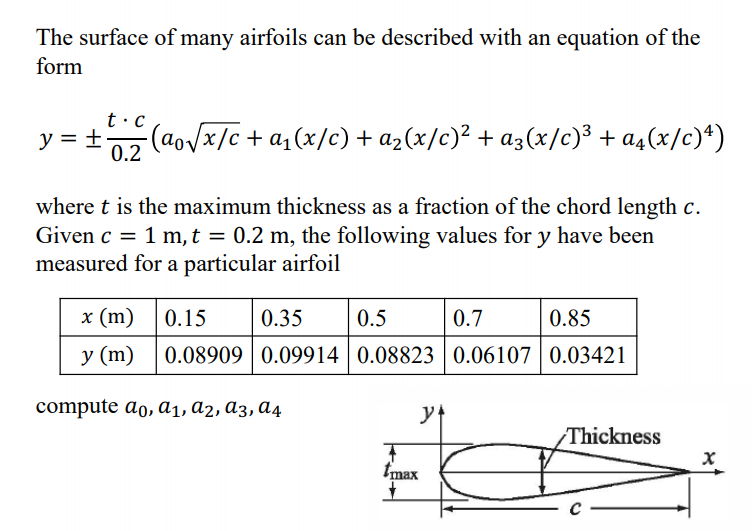
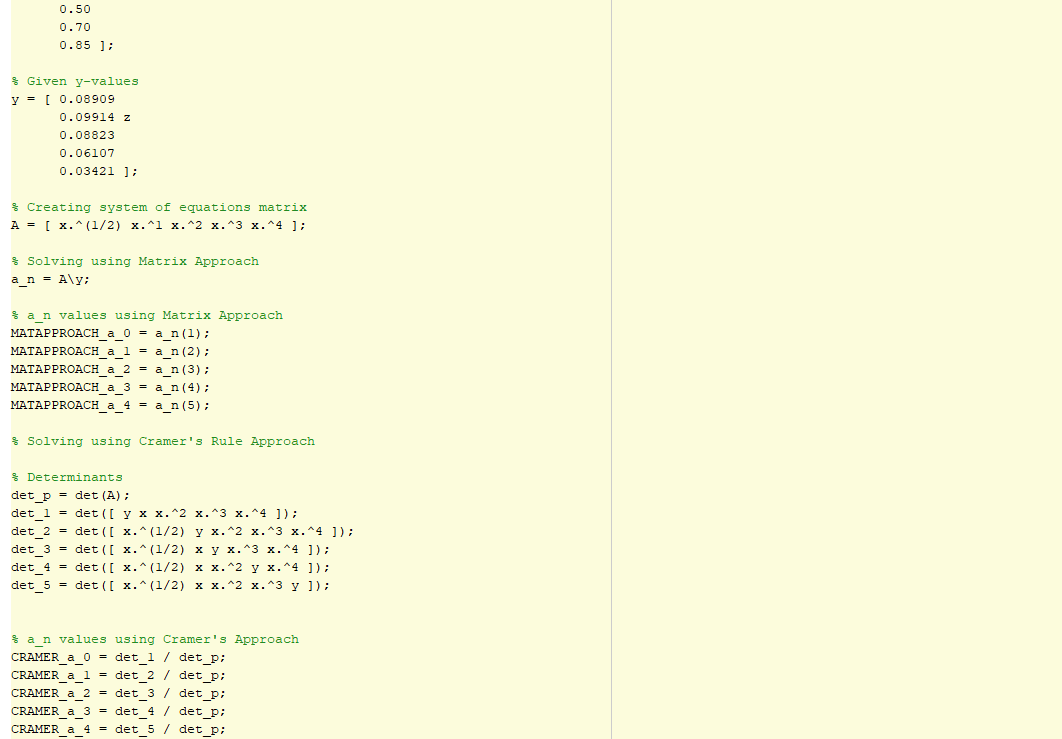
Uhh Mix of linear and matlab, not sure which one to post this on


Did I solve this correctly? There is an equation for each x value and each corresponds to a y value
Using the Ax = B approach, and Cramer's Rule approach
I think you can just use linear regression
for this
fit a degree 4 polynomial
through 5 points
Oh, the prof wants us to only use those 2 methods
Practicing MATLAB's element by element matrix operations and also right division 😄
Yea, that's why I am not sure where to put this question
It's linear and also matlab
ty
so to check is vector v and vector u are linearly independent, I just have to make sure they are not on the same line ?
sure, that's one way to know
that works only if the set you're checking for linear independence only has two vectors to begin with
a set with more vectors may not have any pairs of vectors that are parallel (i.e. "on the same line", as it were) yet fail to be LI
i see
so is there a "better" way to find out if a vector is linearly independent
that works only if the set you're checking for linear independence only has two vectors to begin with
thats the same thing as saying a 2d space right
so is there a "better" way to find out if a vector is linearly independent
*so is there a "better" way to find out if a set of vectors is linearly independent
ah yes
thats the same thing as saying a 2d space right
no, it is not
if i wanted to say "your space is 2-dimensional" then i would have said "your space is 2-dimensional"
smartass answer: use the definition of linear independence
a_1, a_2, a_3...a_k are not all 0
yeah, why is that do you think?
what
"not all zero" means "not all zero"...
if you find that ANY of those scalars are not equal to 0, then S is linearly dependent
how would I go about proving that $(V^)^ \cong V$ if $\dim V < \infty$
matqew:
ye
So, V* is the set of linear maps from V to F
V** would be the set of linear maps from V* to F
Suppose we have x in V, which maps to y in V** such that for all v in V*, y(v)=v(x)
@wintry steppe Can you finish the proof that this is an isomorphism?
So firstly, it must be injective and surjective
Can you show that?
Injective should be ||pretty obvious||
Surjective may not be obvious, so you might want to consider the inverse map
f(v) = f(w) imples v = w
ok i got injective
something's surjective if it's kernel is just the zero vector?
@pallid swallow
no that sounds like injective
So, we need to show that every y in V** has y(v)=v(x) for some x in V
Hi
I just started linear and it's the first time i'm learning this whole thing
how do i figure out what's a pivot
i'm meant to change equations to echelon form
which i think is pretty straight forward, except i cant get the solution
the pivot is the element in a matrix that you want to be 1, with 0s above and below it
during gaussian elimination
your pivot starts at the left-most side and goes to the right during the first half of gaussian elimination
and then it goes the other way
so when it has 4 unknowns, x, y, z and u, then i have to make 3/4 of the bottom row 0?
the first 3 from the left?
if you have 4 unknowns and 4 equations, yes
i have to make 5, 3 and 3 become 0 from the last equation?
and then 4 and 3 to become 0 from the 3rd row
yes
search up "Gaussian Elimination steps"
and follow those steps
I think this is a good source
that explains it
thank you
So I had a weird dream last night. Are there any useful/interesting properties of polynomials with matrixes as variables?
*Square, invertible matrixes, obviously
if you want to do something stupid to a matrix, like say for example take the cosine of a matrix
how would you do that
and furthermore, what the fuck does that even mean
Taylor expansion of cosine and pop in a matrix?
yes
but there's some catchess
the eigenvalues have to be within the interval of convergence
Okay but why?
doing $X^n$ for some matrix X, is the same as doing $S^{-1}D^nS$ for some diagonal matrix D and S as a matrix of eigenvectors
PorosInMyAshe:
assuming X is diagonalizable
and $D^n$ is just taking the nth power of each diagonal element
PorosInMyAshe:
Ohhh
and so each diagonal element kind of makes a taylor series on its own, so each diagonal element must be within the interval of convergence
and each diagonal element is an eigenvalue
I have no idea what happens if it's not diagonalizable
no, i'm pretty sure not all matrices are diagonalizable
not all eigenspaces are big enough
I could be wrong though, so correct me if I am
I'm not sure, I just think that was something my math models professor said at some point
my lin alg professor said a vast majority of matrices are diagonalizable, but there are matrices that aren't
those are annoying and undesirable matrices
Oh yeah so
and apparently not too common considering all matrices
Pretty much all matrixes are diagonalizable
Meaning
If you were to randomly choose a matrix from a uniform distribution in a bounded region, it will be diagonalizable over the complex numbers with probability 1
yes
it's almost an anomaly to find non-diagonalizable matrices
I think there's a way to deal with non-diagonalizable matrices, where you can perturb an element by a small epsilon, making it diagonalizable
then do calculations or whatever with it
then find the limit as epsilon approaches 0 of the final answer
Another dumb question.
Multiplying by i is the same as a $\frac{\pi}{2}$ rotation, so does that mean that the matrix with i on the main diagonal is similar to the equivalent rotation matrix?
Natsu:
yes, you can make rotation matrices using i
What's up?
it's actually related to calculating exp(iX), where X is the matrix
Is this chat busy with another question?
Maybe this can be solved with derivatives, make an argument about the rate of change of the function (Since it's linear)?
is there a way to use gaussian elimination?
i tried it 3 different times but for each value, i couldn't get the final answer
i tried to sub it back in all equations and didnt get it
Gimmie a minute, I've never done interpolation
you just have to do least squares, don't you?
then check if least squares gives you the exact polynomial
or not
I was about to say
i just got into uni 2 weeks ago
and this isnt part of the lecture notes at all
i have no calculus involved in this
no "least squares"
Least squares is an advanced linear topic at my school. I'm surprised they're asking you to do this
all it says here is triangular form
and row switching, multiplying, addition, subtraction
echelon form
homogeneous and inhomogeneous
the end
I don't think this question can be solved with those topics, can somebody smarter than me confirm?
so he gave me tutorial questions that
i cant answer
LOL
why am i paying so much for uni
since after that, it's just multiplying and row elimination
i'll google
Just throw gaussian elimination at it and find the solutions that make the system inconsistent
Yes this is standard stuff
not sure how to go about doing (a) since there is u and v, and the direction thing for 2v
Ye I did
ok, then find the magnitude of it
oh wait
alright
so after I do the u+2v would I do the 1/sqrt(a^2 + b^2 + c^) and then multiply by 2?
yes @silent dune
@rose grotto calculate A^2
then compare each element
and solve for b and c
do I not need to multiply it by the 2v again tho?
what do you mean compare
set them equal and solve for the variables
$$
\begin{bmatrix}
2 & b \
c & 3
\end{bmatrix}
\begin{bmatrix}
2 & b \
c & 3
\end{bmatrix}
\begin{bmatrix}
4+bc & 5b \
5c & cb+9
\end{bmatrix}
\begin{bmatrix}
1 & 5 \
-15 & 6
\end{bmatrix}
$$
PorosInMyAshe:
ty
@steady fiber does it matter that they weren't unit vectors?
@silent dune
so after I do the u+2v would I do the 1/sqrt(a^2 + b^2 + c^2)
what you did here was divide u+2v by its own magnitude, making it BECOME a unit vector. this is how one turns non-unit vectors into unit vectors
oh
so the final answer would just be 2/sqrt29, no need to multiply it by anything else?
2/sqrt29 as your final answer to part A? not at all
wait
what would the next step be then?, assuming after I get the new vector
cause I thought it was 1/sqrt(new vector)
then multiply by 2 for the length
1/sqrt(new vector)
this makes no sense
sqrt(a^2 + b^2 + c^2)
do you know what this is?
tell me what sqrt(a^2 + b^2 + c^2) is
sqrt(29)
no, i mean for any vector, what does sqrt(a^2 + b^2 + c^2) mean?
the length of the vector
correct
dividing x by its own MAGNITUDE turns it into a unit vector
to do that, you multiplied x by 1/||x||
1/||x|| is not the same thing as 1/sqrt(new vector)
I just did that as a shortcut
and sqrt(new vector) makes no sense
alright just forget about it then lol, instead of typing the whole thing out I just wrote that
suppose i have two vector spaces E and F that are both in R^4, E = span(u_1, u_2) and F = span(v_1, v_2, v_3), i want to find a basis for E+F, so E+F=span(u1, u2, v1, v2, v3) which is the span of 5 vectors, but since both E and F are subspaces in R^4 then Dim(E+F) <= Dim(R^4)= 4, i'm thinking of just pluggin them in a matric, then do row echellon form and get the pivots, which are the basis of E+F
is this correct
i mean we can just put E+F = W
then W = span(u1 u2 v1 v2 v3)
and then just do the usual steps to find a basis for W
this was my logic
well i got a problem
A =
1 0 -2 -1
0 1 -1 1
1 0 0 2
0 2 1 -1
0 -1 -1 0
>> rref(A)
ans =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
0 0 0 0
i just don't get it
why is the length of the pivot vectors 5
but they're 4 actually
A = [u1 u2 v1 v2 v3]'
where the vectors are given is this format
u1=(1 0 -2 1)
can anyone give me a hint 🙂
yes
but the way to choose the vectors is like this
which makes no sense since the basis would be length 5, for a set in R^4
i'm a supposed to transpose the vectors
?
the basis would be length 4 in r^4
????
that doesn't imply the basis is length 5
you have 5 things, you have more than you need
that's what will happen
oof you dont get me
if i choose the 4 vectors from the original matrix
i'd get
1 0 -2 -1
0 1 -1 1
1 0 0 2
0 2 1 -1
0 -1 -1 0
4 vectors
each has length of 5
i'm working in R^4
which means each vector must be 4 or less
the 4 vectors are in the column space, which is R^5
you are looking for the row space, which is R^4
the R^4 space is what you get when you look across the rows
not down the columns
you are conflating the row and column spaces
ya, you can see that the first 4 rows
span R^4
the last row is extra, since you had too many vectors
you can include the last row if you'd like, but it wouldn't be a basis then
oh for that, you can't just pick the basis vectors like that
you were looking for which of those form a basis
now I understand what you're saying
to do that you have to column reduce
instead of row reduce
or you have to look at the transpose of the matrix then row reduce
you want
1 0 1 0 0
0 1 0 2 -1
-2 -1 0 1 -1
-1 1 2 -1 0
instead of
1 0 -2 -1
0 1 -1 1
1 0 0 2
0 2 1 -1
0 -1 -1 0

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
yes
np
another word for the coefficient in front of the vector is called a weight?
depends on the context
a coefficient in front of anything can be called a weight
in the appropriate context
ok
I would personally use scalar
im having trouble drawing vector (8,2,-6) on a graph
that's fine
okay nice
so i made a point of where x and y mert
meet
but idk how to do z
(8,2)
so if i have these vectors (i factored them to show that they are dependent)
in a sentence, I can say, "since at least one vector is a multiple of another, they are dependent"
does that make sense
Yes
not really sure tbh
oh okay
that was a very fast reply lol
so in this case, (v1,v2,v3) would just span a line? v1 being the first vector, v2 being the second vector...
okay thanks
What's the definition of a symmetric matrix?
@half ice one that has the same trace or something
A is symmetric if A = Atranspose
Like, the matrix is symmetric if you can flip it over the diagonal and it's the same
@half ice ok so how do I do the problem
Do you understand what a symmetric matrix is?
Use the fact that A is symmetric
Look at the first matrix
How do you make it symmetric
can i get a hint for this? I think he's trying to hint something about the inner product $<a,b> = \int_{0}^{1} ab^2 dx$
Victoria:
I have x1 and x2
I mean how do I get x3
If x3 are free variables
I have x1 + 8/10x3 = 16
and x2-1/5x3 = -2
how would I get x,x2 and x3
if it’s a 2x4 matrix
i thought the lines are parallel tho
Span(u, v) is the set of all vectors of the form au + bv
yeah
Let b = 0, we find that all vectors au are also in Span(u, v)
doesn't through mean go past it
Touches u, then goes past it
@half ice can u help me with another question
but i thought all the vectors are in the same direction
not in the same direction
but they dont intersect each other
i dont understand when it says "through"
is there something visual i can
like a graph
Imagine an arrow that starts at the origin, ends somewhere. That's the vector "u"
yeah
You could imagine it in 2D or 3D idunno
i get that
so where does through come from
does it mean ontop?
then past it but still in the same slope
Span(u) is all of the vectors that have the same direction as u. That is, they all form a line that is overtop of u, and continues forever in both directions
These are all of the vectors au for any scalar a
Perfect
Reminder that the green line is actually all of the infinitely many vectors in Span(u)
yeah