#linear-algebra
2 messages · Page 28 of 1
@quasi plume are you trying to self study it? I can give you the pdf to a very good book
ok
@north sierra
send me it
he will give you a $135 book for free
its in RREF
im trying to do what i did earlier
if you scroll up more
i had a chat with Kaynex
i want to get the equation
for the free variable
i think it is right cause i got the same answer as my TA
Same idea, turn it into the equations, solve each pivot in terms of the non-pivots
You have three free parameters, the solutions form a 3 dimensional subspace
im having trouble kaynex
Basically, the only thing you need to do is
x1 = -1 - 3x2 - x3 - x4
You can choose x2, x3, x4, and find x1
You're rearranging
x1 + 3x2 + x3 + x4 = -1
so what should i rearrnage?
The -1 has no reason to change sign
think of that veritcal line in the matrix as the equal sign
You're rearranging
x1 + 3x2 + x3 + x4 = -1
^
Into x1 = -1 - 3x2 - x3 - x4
Just algebra, adding the numbers onto both sides until you get the form you want
oh ok
makes sense now
lol
so that's all i do?
You can choose x2, x3, x4, and find x1
i can choose any value ?
for x2, x3, x4?
yes
but if they ask you to find the general solution for the matrix
then you state that they are free variables
so the general solution would be written like this?
i meant to put x2 not x^2 lol
in that text book it uses my way
but i also saw my TA use your way
so it's both good i guess
: D
i went from like 2 hours for 1 matrix
YUH
applications are hard, especially in the textbook
dm is always open 😄
lets GO
haah thanks bro
@half ice Are you available to help me put a linear programming problem into tableau form please? i'm very confused
for part (c) i reformulated the constraints with the slack, surplus and artificial variables
but im not sure how to solve this using big-M
I can't say I know any linear programming, sry
how can we prove that index of a nilpotent matrix <= n for A is nxn matrix?
I've read some solutions in mathematics stack but don't understand a lot
if you wanna change row 2 for example
can you do row2 = number * row2 - another number * row3
or can you only do row2 = row2 - number * row3
you could do either.
@undone garnet is that Geoffrey Hinton in your picture?
@north sierra it is
np
right any non zero scalar
what does scalar mean
like a "regular" number, not a vector or anything.
oh ok
the idea that comes to mind is that you have $\ker{A} \subset \ker{A^2} \subset \cdots \subset \ker{A^n}$ but I am not sure how to argue that each should be a proper subspace of each other.
kxrider:
oh, that's a good hint I think
because we also know that if ker A^k = ker A^{k+1} then ker A^k = ker A^{k+1} = ker A^{k+2} = ...
@undone garnet proved this earlier (maybe a week or so ago?)
ohh
but since A is nilpotent.... (should be easy to finish from here)
yeah
@undone garnet just curious, where do your questions come from?
my facebook
but
we get what from there?
prove index of A (nilpotent) <= deg(A)
yes I know
the kernel eventually becomes the whole thing
and it must do this before ker A^m = ker A^{m+1}, because if this happens it stops growing forever
in the worse case scenario, the dimension of the kernel increases by 1 each time you take a higher power
so even if ker A is 1 dimensional then the kernel increases to the whole space by A^n
is this about my question?
nah, nguyens
oh
and it can not be that dim ker A = 0 since then A is an isomorphism and can't be nilpotent
Ok so in order for A^k = 0 k<=n for an nxn matrix, the dimension of the kernel of A must decrease by at least one with every composition of A with itself.
Suppose we have a nilpotent nxn matrix where the dimension of the kernel decreases by 1 after every composition with itself, except for exactly m times when we have that ker(A^j) = ker(A^{j+1}). Lets say A^k = 0. Then we can conclude that k = n+m.
But its never the case that ker(A^m) = ker(A^{m+1}) for a matrix with nontrivial kernel.
Its never the case that ker(A^j) = ker(A^{j+1}) and ker(A^j) not equal to ker(A^{j+2})
corrected the last part
hm...
because A is nilpotent matrix => det(A) = 0 => rank(A) != n => ker(A) >= 1
suppose index of A is k > n
=> A^n != 0 => ker(A^n) < n or we can say that ker(A^n) <= n - 1
1 <= ker(A) <= ker(A^2) <= ... <= ker(A^n) <= n - 1
this statements implies that exist m < n that ker(A^m) = ker(A^{m+1})
for any vector v
(A^k)v = 0 (because k is index)
m+1+k-(m+1) = k so
(A^k)v=0 <=> A^(m+1).A^(k-(m+1))v = 0
this one implies A^(k-(m+1))v is in ker(A^(m+1))
=> A^(k-(m+1))v is in ker(A^m) too because ker(A^m) = ker(A^(m+1))
=> (A^m).A^(k-(m+1))v = 0 <=> (A^(k-1))v=0
do this k-n times
we get A^n = 0
you don't need to do it more than once
you already arrived at (A^(k-1))v=0
this contradicts the fact that you said in the beginning k is the smallest k so that A^k = 0
essentially you reproved the fact you proved a week or two ago that if ker A^k = ker A^{k+1} then ker A^k = ker A^{k+1} = ker A^{k+2} = ...
but yes it's correct 👍
I prove that
for a sequence
A^k, A^(k+1), A^(k+1),..., A^(k+n)
if ran k(A^k) = rank(A^(k+1))
then
ker(A^k) = ker(A^(k+1)) = ... = ker(A^(k+n))
just to solve my prob that rank(A)=rank(A^2) then find rank(A^3)
after remind my proof I find that this one can solve my latest prob to
ker(A^m) = ker(A^(m+1)) for m < n
ker(A^m) = ker(A^(m+1)) = ... = ker(A^k) = n
so A^m = 0
🤣
$\begin{cases}x_1+x_2=1\x_2+x_3=2\\cdots\x_{n-1}+x_n=n-1\x_n+x_1=n\end{cases}$
Nguyễn Thành Trung:
any idea help me to solve this system linear equation?
looks inconsistent if n is even
should be easy to solve if n is odd
just write
x2 = 1 - x1
x3 = 2 - (1 - x1)
x4 = 3 - (2 - (1 - x1))
...
xn = (n-1) - (........)
x1 = n - (...........(1-x1))
use the last line to solve for 2x1 = n - (n-1) + (n-2) - ... + 3 - 2 + 1
also n - (n-1) + (n-2) - ... + 3 - 2 + 1 = (n+1)/2 since every two terms combine to give 1
so x1 = (n+1)/4
I didn't substitute x1 back in to get formulas for the other variables
but that can't be right
the sign of n should depend on i
oh sorry
for example x2 = 1 - (n+1)/4 = (3-n)/4
mistake
Nguyễn Thành Trung:
typo 🤣
$A_n, 2012A^3=2011A+I$ Prove that $\exists lim_{k\rightarrow \infty}A^k=D$ and $D^2=D$
this is the hard one
D'alembert
Nguyễn Thành Trung:
Ann:
and how does it relate to $A$
Ann:
A_n means A is nxn matrix
you mean $A\in \mathbb{R}_{n\times n}$
Ann:
Well, $A^k$ seems to be converging towards $I$.
Element118:
this is the hard one
my friend solved it
but his solution doesn't make sense to me
can you show his sol & the part that doesn't make sense
oh it's in viet?
yeah
it is
he uses this one
The fundamental theorem of algebra states that every non-constant single-variable polynomial with complex coefficients has at least one complex root. This includes polynomials with real coefficients, since every real number can be considered a complex number with its imaginar...
to prove that
A is a diagonalizable matrix
equation: 2012x^3-2011x-1=0 has three solutions
x_1=1
x2=-4.97.10^(-4)
x3=-0.9995
x1, x2, x3 <= 1
=> A has eigenvalues <= 1
but that assumes n=3
you can't assume A diagonalizable
and I don't know why he needs to mention D'alembert here
hmm 2012A^3-2011A=I so (2012A^2-I)A=I so A is invertible.
this is his solution
but this assumes diagonalisable?
wait
he proves A is diagonalizable
we have 3 distinct eigenvalues
not assume
but doesn't that require n=3?
Nguyễn Thành Trung:
diagonalizability, that is
$\begin{cases}x_2+x_3+x_4+...+x_n=1\x_1+x_3+x_4+..+x_n=2\x_1+x_2+x_4+...+x_n=3\\cdots\x_1+x_2+x_3+...+x_{n-1}=n\end{cases}$
Nguyễn Thành Trung:
that's just $x_i=\frac{n(n+1)}{2(n-1)}-i$
how 😮
Element118:
Nguyễn Thành Trung:
were you only asked for the last variable
solve this system equation
this one is tedious for me
my method will have solution
but it's tedious
by
row1 = row1 - row2
row2 = row2 - row3
...
row(n-1) = row(n-1) - rown
after that
row1 = row1 + row2 + ... + row(n-1)
and then
row2 = row2 + row1
row3 = row3 + row1
...
row(n-1) = row(n-1) + row1
and the next is
row2 = (row2)/n
row3 = (row3)/n
...
row(n-1) = (row(n-1))/n
looks like just try out taking the difference of two rows
I'm trying to make A to become an E matrix
E = I
for this, we can easily solve this one
but it's too tedious for me
I'm looking for another way to do it
im trying to prove that two vectors that are perpendicular to the same two vectors are parallel
and i get that its obvious through intuition
but im stuck in getting through with rigour
use the dot product
yeah i have the four relations
where the dot product is zero
but i cant get any further without running into circular logic
Well think about what you're trying to end up showing
And see if you can manipulate your relations to get htere
is this 3d?
@amber bay this isn't necessarily true
consider R^5 with the standard inner product
e_1 and e_2 are both perpendicular to e_5 but are not parallel
oh yeah i shouldve mentioned its in R^3
and yeah ill give it another go later, ill just say i did try manipulating my relations to my maximum extent already fams
if it's in R^3, this isn't true?
(1, 0, 0) is orthogonal to (0, 1, 0) and so is (0, 0, 1), but they aren't parallel
I have a set of 5 vectors with 4 entries in each, so the set is linear dependent. After putting the 5 into a matrix A and then getting the resultant RREF matrix, I have one free variable. How do I find a nontrivial linear combination of the vectors that satisfies Ax= zero vector?
If I'm just subtracting two vectors (a - b), a = (-4,2) b = (1,-4) what would it look like graphically, would I draw 4 to the left, 2 up, then switch the signs on the b vector going from the tip of a, 1 to the left and 4 up ending at (-5,6) and then connect the tip of that to the origin (0,0)
Is a column vector the same as a nx1 matrix?
@prime knoll yes
Alright thanks
you know how variable - equations = free variables
what if the (variable - equations) < 0
does that infer anything
wth is variable - equations?
for the system of linear equations
number of variables - number of equations = number of free variables
so what if (number of variables - number of equations) < 0
we call that an overdetermined system when you have more equations than unknowns. an overdetermined system might be inconsistent or have solutions depending on whether you actually solve it
It is (number of variables) - (number of linearly independent equations) = (number of free variables)
That difference is never negative
what does number of linearly independent equations mean
so like i have this
wouldn't it be 3 - 4 = -1
No, because at least one equation/line can be obtained through linear combinations of others
So the number of linearly independent equations (that can't be obtained in such way) is less then 4
can you give an example of which equation can be obtained through another
for my Question
R2+R4 = R1
Mm I don't know we should have to calculate that number
Have you already seen the term rank of the system/matrix ?
There is an algorithm to calculate the number of linearly independent equations
oh
But you'll probably see it later on, I suppose
i see
,w row reduce {(2,2,0),(1,-2,-3),(3,0,-3),(1,4,3)}
Requested by Mat#9616
Then one sees the rank is 2
what
However we were considering your system as if the RHS were 0
The matrix of coefficients I wrote represents the system
There are some operations that can transform the matrix preserving its rank (if we apply them, the matrix is changed step by step into a different matrix with the same rank)
Those can be properly applied to simplify the matrix in the so called "row reduced form"
oh yea
Were the rank is more evidently readable
so this doesn't have anything to do with finding the independent equations?
We found the number of them
The rank of a matrix is basically the number of linearly independent equations of the system associated to it
It's 2
oh
Because the simplified matrix with equal rank we found has more clearly rank 2
With system associated I mean the one with all the RHS equal to 0
oh
Basically the concept of linearly independent equations coincides with the idea of making the system as essential as possible
so thats the algorithm you were talking about earlier?
to find the independent equations
If there are equations that can be obtained by combinations of others, they are superfluous and we could ignore them
or is there another one
Yes it's called gaussian elimination
i see
But you'll see these things in a more precise way I hope!
Awesome, you're welcome
Hello~ I am trying to find the values of a parabola but since my "completing the square" skill is bad so can you guys help me to check if my equation is right or wrong ? thanks
post your Question
I have a question too
Find the point of intersection of the two lines or show that no such point exists:
x = 1 - 3t, y = 7 - 2t, z = 3 + t
x = 1 + s, y = 2 - s, z = 1 - s
what i did was separate them
(1, 7, 3) + t (-3, -2, 1)
(1, 2, 1) + s (1, -1, 1)
now am i suposed to ignore the points and solve using the lines? in my understanding the points do not matter right
if the slopes intersect, the lines should intersect too
,w row reduce {(2,2,0,-2),(1,-2,-3,2),(3,0,-3,0),(1,4,3,-4)}
<@&286206848099549185> pls
I don't recall the proper method for this but I may have noticed something im gonna work on on my own paper to see if I can approach another way 
👀
enlighten me
the main point is that, is my theory correct? do i need the points (1, 7, 3) and (1, 2, 1)
or can i just calculate if the slopes intersect
So
x=1-3t
x=1+s
What I thought was to set equal, assuming t and s must be equal at a shared point
(x-1)/(-3) = t
x-1=s
assuming s=t
solve and x=1
at x=1, s and t are equal
but is this true for the rest?
We gotta do that through y and z but lemme check
👀
so not that when x=1
note *
t=0 , s=0
we must plug t and s = 0 through both equations and show those values are equal
y=7-0
y=2-0
z=3+0
z=1-0
that
now can we conlude that they don't intersect ever off of this?
<-3,-2,1> = n_t
n_s = <1,-1,-1>
So i'm pretty sure that the idea is that for s and t to be at <0,n1,n2>
meaning the point
we showed the only solution for x was t=0
I conclude therefore it is not possible for another point of x to be equal at another t
as a line is indeed linear, and won't recur
Can someone properly verify this doesn't intersect? <@&286206848099549185>
and help fren @blissful vault
i was thinking that the only way that two slopes that intersect dont anymore after a translation is if they cross over completely
fact
The idea you mentioned was
@blissful vault you are right
they only cross once if their slopes aren't equal, if they cross at all
they're either parallel and equal
or incidentally they cross at some point P
you right
ok so i just have to prove that the slopes n_t and n_s cross, then even if they are moved to another starting point they shoudl still cross, just at a different P
ayt
thx
wait i got lost
how do i solve where the points meet
assume s=t
at x, y, or z
if they share a point
show that the x value of s and t
are equal
i.e. s=t
hey guys, I wanna self study linear algebra.. which book should I use: hoffman kunze or roman?
@earnest zinc can hook you up, @zealous kettle
?
with a v good book
ah.. ok
Sure!
to find out if a system of linear equations is consistent you HAVE to put it in RREF or is there another way?
oh ok
so how do i know
if its consistent now
it's in REF mode
hope thats clear
oh
inconsistent*
if there isnt a 0 0 0!b then its consistent
because the 0 0 0!b shows that there i no solution
yeah
because for a nonzero constant b, having a row 0 0 0 | b implies 0x+0y+0z=0=b which is nonsense
yeah
true
so the question is asking
DEtermine if the system is consistent
would i just explain
if the system is consistent then it has at least one solution
oh basically just get it in echelon form, then say that since there isnt a row 0 0 0!b, the system is consistent
oh
but the thing is
it's already in echelon form
like the question gave the matrix in REF form
then just look to see if there is a row of 0s except for the last entry which is nonzero
it's 1a on page 9 btw
lol
oh
then i can just explain since there is no row of 0s = to a non zero, the system is consistent?
tes
yes
but you should prob go more on depth
just for funzies; say if it has one solution or multiple
they will ask if it has one or infinite solutions later
o
if there is at least one free variable then it has inf sol
😄
yessir
except for the last column (= column)
okay sweet
is there a name for the last column?
in an augmented matrix i mean
ok
-3t -s = 0
s -2t = -5
s + t = -2
to transform this into a matrix is it
-1 -3 | 0
1 -2 | -5
1 1 | -2
?
because trying to solve for it gives t = 1 nd t = -3 at the same time
so is this impossible matix?
<@&286206848099549185>
you mixed up the first row
i think
wait no im not helping you you did not obey rools
rool

...

it's the same problem from 2h ago
kay nvm

uh yah as i said you flipped the first row
your coefficients are -3 and -1, not -1 and -3
ye
then i sent the unknowns to same side

The coefficients looked right to me.
They were just written in a different order.
i didn't see that the first row was t then s but the rest was s then t
lol
It would be nice to see your calculations after obtaining the matrix.
fancy background
I think you need to elaborate that last step.
I mean, I can straight up tell you that there is one, consistent solution to this set of equations.
,rotate
Hang on, let me work through your calculations.
,w row reduce {(1,5,2,-6),(0,4,-7,2),(0,0,5,0)}
maybe my method is wrong?
i was trying to find values of s and t when the two lines intersect
Yes, I see.
So here's where I'm confused.
The two equations:
3x+y = 0
x+y=-2
Intersect at (1,-3)
Oh.
Hm.
Maybe it's the other pair that's wrong. That's working. It gives y =-3
?
No.
?
Ok. Let me be extra careful here.
s = x, t = y
So we get -x -3y = 0
x-2y = -5
x+y = -2
yes
Your calculations are correct. There is no single point that satisfies all three equations.
okoko lemme recalculate
Pro tip: Don't write your variables in different orders. It makes things confusing. 😛
sigh wait i realised i was doing the wrong assignment

ok i'm back on problem 22 of my actual assignment 😢
is there a formula for shortest distance?
,rotate
dot product?
what does dot prod do?
projection
wat
yeah
dot product of 2 vectors is the projection of the first on the second multiplied by the length of the second
@north sierra So what have you tried?
made it in rref
and?
found a free variable
where?
x2
what's your rref?
1 -1/2
0 0
there's a h and k
yeah, so your result is in terms of h and k
1 1/2 | h
0 0 | k
?
idk how i would do it
with h and k
i dont know what h and k are
well, they are numbers
you can add, subtract, multiply, divide (as long as they are not 0) them
i dont get it
you don't know the exact values, but you know they are real numbers
yeah so?
so, you can manipulate them like real numbers
just that you don't know the actual value
k = -3, h = 1
anything else? @north sierra
You might want to write it in terms of an expression in k and h
well, what other values work?
so, how do h and k relate?
k = 3h?
nope
x2 is a free variable right?
how come when i try to substitute the values back into the original equation, i don'gt get the same answer? @pallid swallow
so
2(k/2) - (k/3)+h = h for the first equation
the first equation is giving me problems
where k = -3 and h = 1
oh it worked now
my algebra was messed up thats why
thanks nvm
lol
how can see the graphs of these equations btw?
like is there a way to graph this
on desmos
or something
you let x1 be x and x2 be y
well, why do you want to graph it?
^
i’m just curious as to how it would look on a graph
congrats on the helper role @earnest zinc
u helped me a lot
diagonal is 1 to n?
it is
hm...
after that
let row2 = row2/2
then row2 = row2 + row1
row2 = row2 - row3
row2 = row2 - (row4)/2
let me try this
$4-2n$
Nguyễn Thành Trung:
yes, now for what n?
what values can n take such that the determinant = 4 - 2n?
$n \ge 3$
Nguyễn Thành Trung:
$\begin{vmatrix}
-1&0&0&0&\cdots&0&0\
2&2&2&2&\cdots&2&2\
0&0&1&0&\cdots&0&0\
0&0&0&2&\cdots&0&0\
\vdots&\vdots&\vdots&\vdots&\ddots&\vdots&\vdots\
0&0&0&0&\cdots&n-3&0\
0&0&0&0&\cdots&0&n-2\
\end{vmatrix}$
Element118:
and now time to cofactor expansion
actually, we can just eliminate easily
$2(n-2)!$
Nguyễn Thành Trung:
$-2(n-2)!$, you mean
Element118:
Nguyễn Thành Trung:
Isn't that just $I+ab^T$
Element118:
hmm...
basically you want to multiply each value in a 3x1 matrix by multiplying that vector with a matrix?
repost my problem
Hmm
Looks like we can eliminate quite a lot
Okay, firstly we can probably remove all rows with 0, and their corresponding column
If a3=0, we can remove the 3rd row and the 3rd column
So, let's assume a1, b1 are not 0
hmm, a1 not 0 is sufficient
$\begin{vmatrix}
1+a_1b_1&a_1b_2&a_1b_3&a_1b_4&\cdots&a_1b_{n-1}&a_1b_n\
-\frac{a_2}{a_1}&1&0&0&\cdots&0&0\
-\frac{a_3}{a_1}&0&1&0&\cdots&0&0\
-\frac{a_4}{a_1}&0&0&1&\cdots&0&0\
\vdots&\vdots&\vdots&\vdots&\ddots&\vdots&\vdots\
-\frac{a_{n-1}}{a_1}&0&0&0&\cdots&1&0\
-\frac{a_n}{a_1}&0&0&0&\cdots&0&1\
\end{vmatrix}$
now we use each row to eliminate the terms in the first row as such
Element118:
yeah this seems correct
$\begin{vmatrix}
1+a_1b_1+a_2b_2+...+a_nb_n&0&0&0&\cdots&0&0\
-\frac{a_2}{a_1}&1&0&0&\cdots&0&0\
-\frac{a_3}{a_1}&0&1&0&\cdots&0&0\
-\frac{a_4}{a_1}&0&0&1&\cdots&0&0\
\vdots&\vdots&\vdots&\vdots&\ddots&\vdots&\vdots\
-\frac{a_{n-1}}{a_1}&0&0&0&\cdots&1&0\
-\frac{a_n}{a_1}&0&0&0&\cdots&0&1\
\end{vmatrix}$
how you eliminate
Element118:
Hence the determinant is $1+a_1b_1+a_2b_2+...+a_nb_n$
Element118:
how did you come up to this one?
Oh, just subtracted the first row $\frac{a_i}{a_1}$ times from the $i$th row
Element118:
That's assuming if $a_1$ is not 0
Element118:
if all are 0, then trivial
otherwise, we probably can do some row/column swaps and transposing to make a1 nonzero
@rich wren #prealg-and-algebra
I have an alternate solution by considering the eigenvalues, since the determinant is the product of eigenvalues
oh yeah
first take (I+ab^T) and check that as long as b^Ta !=0 then it has eigenvalue (1+b^Ta)
then there's an n-1 dimensional subspace of vectors perpendicular to b
so (I+ab^T)c =c all have eigenvalue 1
it's a symmetric matrix but yeah I don't know I forget what it implies past having orthogonal eigenvectors for separate eigenvalues
AA^T would be an orthonormal matrix times a diagonal matrix times another orthonormal matrix
I think the n-1 subspace of eigenvectors can still be orthonormalied with gram schmidt
If it's symmetric then yes all eigenspaces are orthogonal
my thinking is, we have an n-dimensional space so we can represent any vector by a linear combination of a with the n-1 vectors orthogonal to b
of course if a is also orthogonal to b, then the determinant is really just 1 because the original matrix is just the identity matrix
hmm interesting observation
dont wanna ping any helpers, but if anyone does have an idea, ping me back 😄
I think that
a1, a2, a3 is linearly independent
sow
so describe a matrix with rank = 3
how did you come to that conclusion?
any thm? or just logic
well
i just wanna make sure i can formalize it, that's all
a1, a2, a3 is not linearly dependent
a3 = x.a1 + y.a2
with x and y can't both = 0
so that means a3 is in span{a1, a2}
where are you getting that equation from?
ive never seen that
is it from a definition?
yes
well, my bad English can't describe what I think
nah it's all good fam
ye
so there must be at least one vector in {a1, a2, a3} is a linear combination of the rest vectors
but a1, a2 is linearly independent
so it must be a3
are u thinking of a free variable @undone garnet for a3
then a3 is a linear combination of a1 and a2
so
a3 = x.a1 + y.a2
x and y can't both = 0
oh wait so if im understanding this correctly
if a3 is a vector built from a1 and a2/// a1, a2, and a3 are linearly DEPENDENT
because x = y = 0 then a1 a2 a3 is linearly independent (not what we assumed)
a3 = x.a1 + y.a2
so a3 in span{a1, a2}
yes @paper egret
theres a thm
if one vector in a set is a linear combo of previous vectors in the set, the set is linearly dependent 
jus leanred that thursday
BUT my prof said we can only use that thm to prove dependence, not independence
it's all good man
though this one this really familiar with me
what does it mean for a linear system to be consistent
i think the definition is too complicated for me to understand
we say that a linear system is CONSISTENT if it admits a solution.
in the context of a matrix, what does that mean?
i think i'm getting matrices and linear systems mixed up
uh huh
well
usually when explaining said representation i adorn augmented matrices with a little decoration
a vertical line separating the last column from the rest
so like
oh wait matrix is just a matrix, augmented matrix is the one with the line separating the equality
damn i keep getting confused on that, stupid
i just learned the difference between matrix and augmented matrix, and before that i was struggling to understand when is when LOL
ok back to consistent
how would a linear system look consistent vs not consistent in the context of a matrix
the system $\begin{cases} a_{11}x_1 + a_{12}x_2 + a_{13}x_3 = b_1 \ a_{21}x_1 + a_{22}x_2 + a_{23}x_3 = b_2 \ a_{31}x_1 + a_{32}x_2 + a_{33}x_3 = b_3 \end{cases}$ is represented by the following augmented matrix: $\left[\begin{array}{ccc|c} a_{11} & a_{12} & a_{13} & b_1 \ a_{21} & a_{22} & a_{23} & b_2 \ a_{31} & a_{32} & a_{33} & b_3 \end{array}\right]$
Ann:
that make sense? @paper egret
yes
mhm
and the row [0, 0, 0, ..., 0 | b] corresponds to the equation 0 = b
which, if b isn't 0, is a contradiction
so if you ever get that
oh so a linear system is consistent if it doesn't have any of that
omg
bro i thought it was something like
[0, 0, 0, ..., b | x]
stupid augmented matrix shit
Does anybody know any good resource for learning about sigma notation sums? I'm in my first year of maths at uni and need to write some proofs about the trace of a matrix.
Yeah capital sigma sums
what kinda math is this
I mean this $\sum$
Arnau ∉ ℝ:
oh uhh gimme a sec
lemme pull up a resource for you
here's like what a Sigma does

Khan Academy
Sigma, Σ, is the standard notation for writing long sums. Learn how it is used in this video.
Okay, thank you!
https://i.imgur.com/v5q6vIq.png how do i solve this?
{kind=link}
{kind=link}
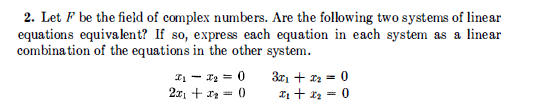
elimination proves that they are equal quite easily, but I'm having a hard time getting linear combinations of the system on the left to equal any of the two equals in the system on the right
I would probably take the left set and generate combinations that give just x1 and just x2 separately
And then combine them to get the equations on the right and simplify
hmm... so something like -1(x_1 -x_2) + 1(2x_1 + x_2) for x1
and 0(x_1 + x_2) + 1(2x_1 + x_2) for x2
then I ... add them?
i think for x_2 it would be more like 1(2x_1 + x_2) - 2(x_2 - x_2) = x_2
Spes:
why would you need 3x_2?
you dont
there's 3x_1 + x^2 and x_1 + x_2
but I mean the way your equation adds up
oh fuc typo
sorry
ok im gonna latex this to avoid the typo
ok wow fuc
i cannot think of how to isolate x_2

oh
like that?
well
https://i.imgur.com/v5q6vIq.png reposting
negative 2 of row 1
idk if that means anything
so then...
Spes:
are you sure it should be -2/3?
$\text{which equals} \frac{-1}{3}(x_1 - x_2) + \frac{5}{3}(2x_1 + x_2) = x_1 + x_2$
Spes:
thats not right either daflekjavap