#linear-algebra
2 messages · Page 25 of 1
Are there any ways to reduce the paper I'm using from solving matrices?
Or any free apps for working with a matrix?
got an rref calculator if you need: https://www.emathhelp.net/calculators/linear-algebra/reduced-row-echelon-form-rref-caclulator
The calculator will find the row echelon form (simple or reduced - RREF) of the given (augmented) matrix (with variables if needed), with steps shown.
symbolab eigenvector calculator: https://www.symbolab.com/solver/matrix-eigenvectors-calculator
Free Matrix Eigenvectors calculator - calculate matrix eigenvectors step-by-step
Thank you, these should help a bit
ummmm wouldn't this just be like the opposite of identity or something?
instead of identity, all 1's become 0's and all 0's become 1 or something?
What's $J_A$?
Element118:
Oh, $T_A$ is the linear transformation defined by the matrix $A$
Element118:
ye
So, I suppose you use the standard basis here
question, when it says Z(v) = 0, does it mean Z(v) = (0, 0, 0, ... 0)?
yes
So, basically what this is asking is, find $A$ such that $Av=0$
Element118:
so it's telling me it turns any vector v, into a 0 vector
this A matrix
gotcha
oh so A
is just
some m * n matrix, with all entries equal to 0
wait idk if that's right
it sounds too easy to be rigt
it is
how would they define the linear transformation if the matrix was something else?
if a system has free variables, the solution set contains inf. many solutions
this is false right bc it can be inconsistent
im p sur eim right im just making sure .. 
yeah it can have 0 or more than 1 with free variables
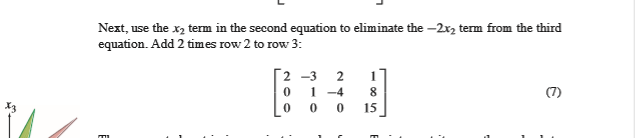
http://prntscr.com/p0hmdk could i use this as an example to prove that statement wrong
my professor is a headass
cuz thats inconsistent but x3 is free
that might work, yeah
Are you sure this system is inconsistent
oh right,
add 2*R1 to R2 and x3 will just go away
wait maybe im dumb
looks inconsistent to me
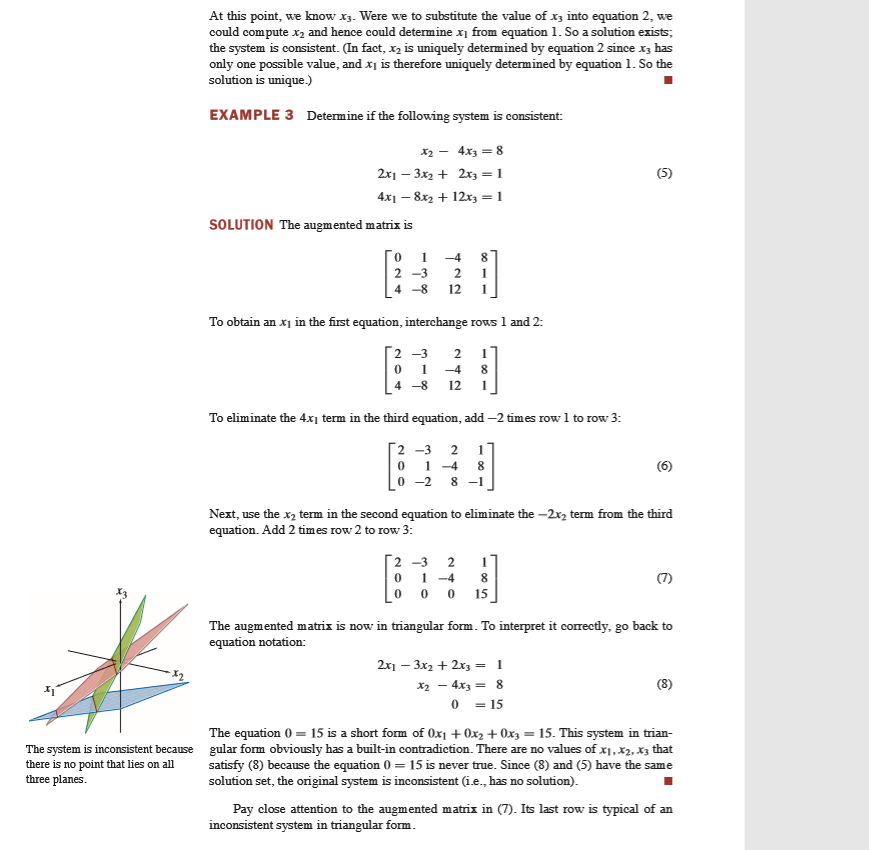
yeah it's inconsistent
yeah linear algebra is a lot more fun than stats and logic
I'm guessing your class just started too?
yes
good luck man, we'll both probably need this channel a lot
i like linear algebra too. cant wait to take it next semester
@proud compass u 2, & for sure 🤠
really dumb question but i cant seem to make sense of it: i have a linear map between vector spaces (both 3D), and im supposed to "show that the map T: V \to W is an isomorphism onto a subspace of W." i got the matrix representation of the map, but it has determinant zero and cant be an isomorphism onto W. could the question mean that it's just an isomorphism of the eigenspaces with nonzero eigenvalue? that seems like a weird thing to prove
the fact that it says "onto a subspace of W" makes me think that it might be what's wanted, but that seems too trivial
dim Gamma(R^3) isn't 3
isnt it spanned by the partial derivatives?
pretty sure there's many MANY more smooth vector fields on R^3 than just the partial derivative fields
i guess the partial derivatives only span the tangent space; do i need to do something fancier to talk about a basis for Gamma?
ah
getting the right answer when you have to explain something
is so fulfilling ..
idk why i like this class so much and its only been 1 week 
because linear algebra is great anyways
our prof is only making us do hand calculations for the 1st 2 weeks
& then after that he said the calculator could do it but he just wants us to see wat is happening or smth
Multiply a 3×3 so you know how, then never do it again
multiply a 4x4 even, then never again :>
yeah, my linear class was taught by a cs guy so it was all just matrix algebra
it sucked ass
homework: here are 10 pairs of matrices now multiply them together
Here are 10 matrices, give me the determinant of their product
@half ice bonus: the matrices' dimensions are such that the product isn't square
that sounds awful
i think we did multiply 3x3 once in cal 3 but he was showing us something from a higher lvl math
i cant imagine doing that that much ☠
A fun trick is getting the determinant of the inverse. I wonder how many kids would find the inverse first?
when we say a function is periodic with period P do we define P as the smallest such number possible?
like f(x+2) = f(x) for all x
do we say it has period 2? or can it be period 4, 6,8 etc
idk where this goes
am working on this

I dont think it matters how we define the period for the first subset, because f periodic with period p implies f periodic with any multiple of p
yea
i was just wondering for the next ones if it would matter
i think if their period ratio is rational
it is closed under addition
ah ok
uh
let f be period a/b, g with period c/d, then f+g should be of period da
since a/b is rational multiple of p and d,b are integers it should be
rational multiple too
yea
i proved it already
thanks
last one is definitely not subspace if we just take two periods with irrational ratio
huh?
like make up a function like that?
I was thinking just contradiction
if F,g are have period of irrational multiples of P
assume (f+g) has some period, call it p_1
then (f+g)(p_1+x) = (f+g)(x) = f(x)+g(x) = f(p_1+x) +g(p_1+x)
for all x
wait
nvm
oof
oh wait i think i got it
i took f(0;1) with your example and f(0;sqrt(2)) and showed that if f(p;1) +f(p;sqrt(2) = f(0;1)+f(0;sqrt(2) then f(p;1) = f(0;1) and f(p;sqrt(2) = f(0;sqrt(2))
then p is a multiple of both 1 and sqrt 2
write p = x1 = ysqrt(2) we get sqrt(2) = x/y which is a contradiction
does being closed under scalar multiplication imply that a set contains the zero element?
why not?
because doesn't multiplying by 0 necessarily give you back the zero element
well for 1 i realized I worded the q wrong
because i'm specifically asking for subsets of a field
so for some subset S over a field F where F contains a 0, does being closed over scalar multiplication by anything in F imply that S contains 0
i'd assume that it does, but that just leaves me confused as to why my linear algebra class listed those seperately when we were talking about subspaces
uh, that depends on what you mean by scalar multiplication
i mean scalar multiplication
yeah
I know that
i'm asking if there's any reason we have to state the fact that 0 is an element of a subspace seperately
since it's implied by the fact that subspaces have to be closed over scalar mul
maybe you're asking if you can replace the 0 \in S condition with S nonempty?
if you don't assume one of these, then your definition of subspace will include the empty set
which is not a vector space, since one of the vector space axioms specifically demands the existence of an element 0 \in V
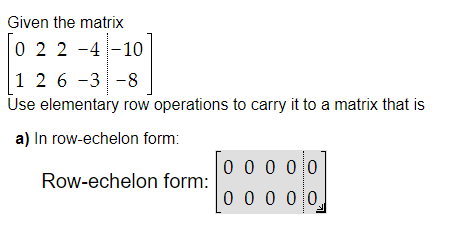
can someone help me understand what I did wrong
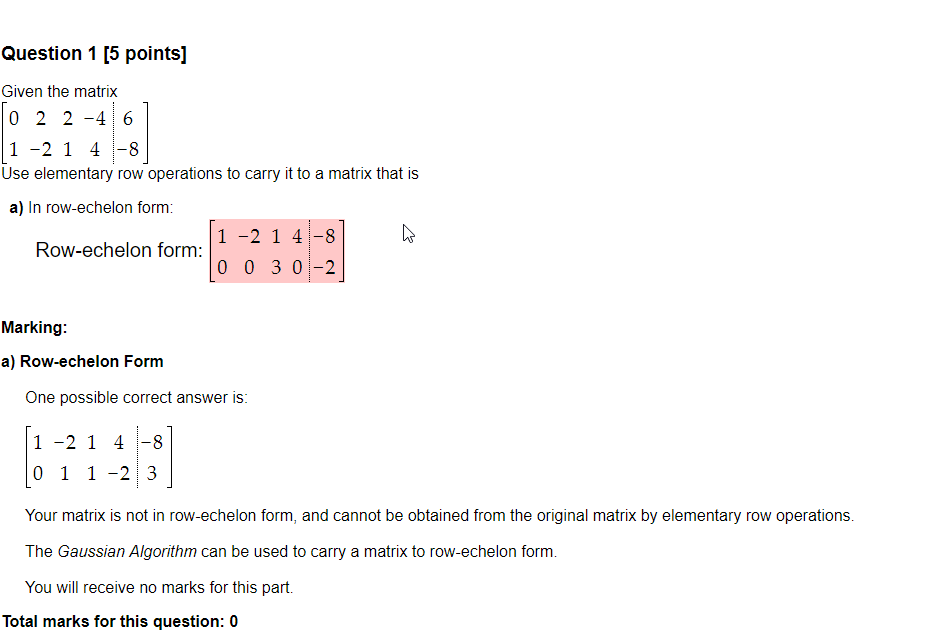
I had to miss the lecture on row echelon form and I'm extremely confused
how did they get the 1 on the second row, colum 2
yes
I'm trying to understand the row echelon, but all the examples i see online are nice ones where you can easily get leading zeroes
I can't find any with only two rows
so for this one, if i just switch the rows
that would be in row echelon?

dang, this is confusing me
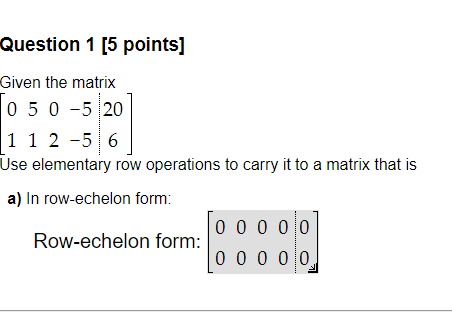
I will, so in reduced row echelon form, we need to form a "staircase" of leading ones per row right?
the 0 need to be underneath the staircase
and the numbers above don't really matter what they are?
the part that confuses me
is that the staircase can go "two steps" ahead
so on this one for example, the 2nd row, the leading one could be on the 3rd column instead of colum 2?
so how would I know where to place the leading one?
does it simply come down to the algebra?
no rules?
because that one for example
switch row 1 with row 2
leading one in R1C1
then leading 1 in Row 2 Col 4?
hmm, so I could divide by 2 and have the leading 1 in row 2 col 2?
and since it's a system of equations, the place of the leading 1 doesn't really matter, because it should still give the same answer at the end of the day?
row ops don't change the solution set
ok, I'll try diving by 2 and see how it goes.
i goofd and got the problem wrong, but I understand it now
thanks for the help
I managed to finally get it correct
quiz
@wintry steppe , first find f(g(x))
Oh sorry
hey, i was absent and missed a lecture for today, does anyone know of a good video that can teach me to solve these? thanks
or just list the approach i could use if you wanna be a real good dog owner
i assume you're taking lin alg alongside DE?
no
this is just some random ting in my lin alg class
he taught steps to solve this but i was gone
this lin alg homework? lol
much of the work you have to do here is lin alg stuff... but solving this problem assumes you've had some experience with DEs
:0
i think because we arent supposed to be rooted with DE knowledge
he just told us a set of concrete steps to do it
but i cant find those steps :c
what the hell is your teacher doing lol
should've just given you a matrix and told you to find its eigenvectors and eigenvalues
end of
but this is wacko tobacco
but the second step is to plug those e-vecs & vals into solutions to the DE
first step find the eigens of the 3x3 maytix?
wait do you know how to find eigenvalues?
ya
like for any square matrix, 2x2 and 3x3
yea yea so find eigens
find eigenvals and eigenvecs first
then plug into
then lemme know when you're done and i'll show you the next steps
wait hold on
: )
have you taken at least calc 1?
ive taken up to multivariable
k cool, so you've seen DEs before
it's just we're solving a system of DEs so we got derivatives of two quantities that depend on the quantities themselves
like dx/dt = 2x + 3y and dy/dt = -x + 5y
class requires 0 calc knowledge
yeah ik it's lin alg :>
ok ok
so ya, first get the eigenvals and vecs then lemme know
actually ill see if youre on in an hour or so
i gtg but ty for giving me where to start
i might be able to derive steps
alright np, i'll be around
im 3rd year uni just now in linear lol
decided on math major last year
yeah cs + math should get you very far. gl with school man
@gray dust
sup

ok so i did the eigenval vecs
and i got -1 as the eigenval and [1;1] as the eigen vector

1
ohm
well the thought the eigen vector was C just in general
then i multiplied A and C
then found what value would relate the product of A and C, back to C
which i found was -1
the way to find eigenvalues and eigenvectors should yield 2 evals for this matrix
and 2 corresponding sets of evecs
hmm
how
how do you find eigenvalues and vectors
if you give a bried summary it might come to me
ah
do you know how to calculate determinant?
yea
do you know the identity matrix I?
RokettoJanpu:
okay eigenvalues are 1 and -1
to get eigenvectors, you then multiply A by the eigenvalues?
oh
wait nvm
nah
for each eval you calculate A - (lambda)I
then let v be lambda's corresponding eigenvector
and solve this
$(A - \lambda I)v = 0$
RokettoJanpu:
??
you didn't use symbolab did you? 🙂
nah
ok cool
i was just confused since i got 0 -2 0; 0 -2 0
so let's keep those evals and evecs to the side somewhere
so i thought that x1 was just completely gone, but its a free variable
and x2 is just equal to 0
yikes lol
let's name the evals and evecs though
$\lambda_1 = 1, \lambda_2 = -1$
RokettoJanpu:
: D
their corresponding evecs will have the same subscripts
$v_1 = \langle 1, 0 \rangle, v_2 = \langle 1, 1 \rangle$
RokettoJanpu:
yes yes
now we're at the differential equation part
i know the equation of the solution or whatever
i just don't know what c1 or why e is in there
had you have taken a DE course, you would know that if you see a DE of this form
$\frac{dy}{dt} = ky$
RokettoJanpu:
k is a constant
yeah ive seen that
this usually leads to the solution y to take the general form of an exponential
$y = ce^{rt}$
RokettoJanpu:
oh
i think you might have done something like this at the end of calc 1, idk
ya ya
but you go into it a little deeper in a DE class
so when you deal with 1st order or 2nd order (meaning the highest derivative in the equation is the 1st or 2nd derivative) DE it's usually a good idea to assume the general solution(s) take the form
of y = ce^(rt)
yes
what we have here is a system of equations though, a bit different
we have two derivatives of different quantities, but those derivatives depend on both quantities themselves
$\frac{dx}{dt} = Ax + By \\ \frac{dy}{dt} = Cx + Dy$
RokettoJanpu:
it becomes a little trickier to solve because we have coupled rates of change
yea
so what we can do is still assume that, because this is a system of 1st order DEs, the solution(s) still take the general form y = ce^(rt)
but now we rewrite the system using matrices
oohoh
so if you imagine <x, y> as a vector in the xy plane
<x, y>' = A<x, y>
where A is a matrix containing all those constant coefficients A,B,C,D
then you apply lin alg skills to get A's evals and evecs
(that is horrible notation, <x,y> reads as a scalar product)
and those things will be what we use to build our solutions to the system
(or a span)
not sure what that question means
t is our independent variable
mm
so instead of just y = ce^(rt) we also have x = ce^(rt)
mhm
we have 2 evals and 2 evecs from matrix A, right?
yeah
that gives us 2 solutions to the system
and since you're in lin alg, i think i can tell you that we will be taking linear combinations of these solutions
the linear combo of two solutions to the system is also a solution 🙂 (to be explained later if you take DE)
is this the answer
x(t) = 1[1 0]e^t + 1[1 1]e^-t
asuuming you transpose the row matrix things
but x_1 and x_2
x1(t)
and x will be a vector made up of components x_1 and x_2
h m m
so here's the solution, ready?
: )
$x = c_1 v_1 e^{\lambda_1 t} + c_2 v_2 e^{\lambda_2 t}$
RokettoJanpu:
thats the eq i used
there you go
i just wanted to give you some idea of where this comes from
oh yeah, and c_1 and c_2 are arbitrary constants that we solve for when we apply initial conditions
,rotate
: ( or : )
👍🏽
yes i do
you spontaneously worked me through the problem
in benevolence 🙂
yup no problem!
: ) : ) : )
you did pretty well for a hw assignment like this
: D : D
to be fair, most of it was lin alg stuff you already know. it's just i don't know why the teacher had to turn it into a system of DEs
such kind words from teacher man
yes current guy bad man
thanks again teacher man bye!!!
yep no prob, if you ever run into trouble with the rest of your hw feel free to ask here 🙂
Hey guys, what are the rules for row echelon on solutions?
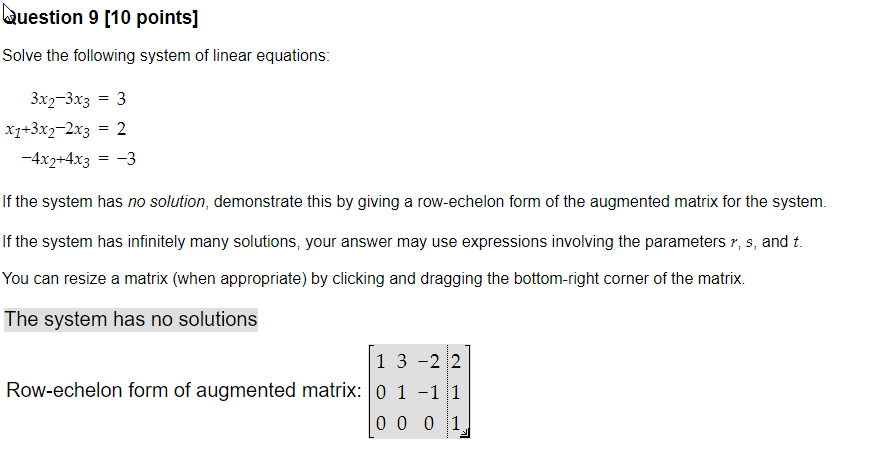
i set it in the form. but from what I remember, when you get a row full of zeroes that = to no sols
if it's 0 0 0 1 does that mean it's just one solution? or no solution?
is linear algebra done wrong good to study while taking a linear algebra class?
@carmine terrace if you correctly applied row operations but end up with a row of zeros with a non zero number at the end, that's implying that 0x_1 + 0x_2 + 0x_3 = 1, which implies 0 = 1... which is a load of horse crap. we call that an inconsistent matrix, and it has no solutions
^ thank you, that's what I was trying to remember. An inconsistent matrix
one more question, when does it have an infinite number of solutions?
when you have at least one free variable
alright sounds good, thanks again. I feel far more comfortable about my quiz tomorrow.
It's still the easy portion, so I better be ready.
yup no prob man. good luck on your quiz!
thanks!
hi i want to do a CS degree and i have a question about linear algebra
this one is lin alg 2 (which i will take)
but i want to know if linear algebra 3 will be useful in CS at all
I don't know if the topics will be really high level academia that won't apply much
Really depends on what field of cs you do
Obviously
But the first half of stuff is more theoretical stuff that might be useful if you do a lot of algorithm type stuff
The second half will be very, very essential for a lot of different cs fields
I have just started linear algebra but I had taken a break off my math classes for a semester and I guess I forgot everything? I don't know if this belongs here... I'd like to know how the coefficient matrix and the constant vectors correlate
My initial thought was to take the rref of v1, v2,v3, v4, v5
But then I realized that does nothing with M
by the way its referring to rref the command in Matlab.
My second thought was to attach V_x to M_x to make a 6 by 5 then rref that, but that seemed more programmy than mathy
matqew:
and now does T((.), v) come about?
@barren plank decided to get a real education
basis was confusing me lmao
<- was the person with the crank la a few weeks ago
I'm blanking on this matrix
https://i.imgur.com/kD4WiKf.png
So I break it down to reduced echelon form
1 0 3 -2
0 1 -1 -2
It's tripping me up, because I can't seem to solve the values for it.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
x_3 can be made free
how so? IDK how to really proceed from here
I'll recheck as well
i got top row 1, 1, 2, -4 
did you add -r2 to r1?
you have the equations
x_1 + 3x_3 = -2
x_2 - x_3 = -2
I divided first row by 5
you can make x_3 a free variable and express everything else in terms of it
your row reduction is fine.
x_2=x_3-2
x_1=2-3x_3?
once you hit a wall like that where it looks unsolvable, I think you can usually put it back into variable form
RokettoJanpu:
what you had so far works I think
I think you're done messing with it in matrix form
yea, cause I understand that I have to allow x_3 = t (I need in terms of r, s, t
but IDK what to do with the -1 from row 2
row 2 can be expressed as $x_2=x_3-2$
Ping Warrior:
$\begin{bmatrix} 1 & 0 & 3 & -2 \ 0 & 1 & -1 & -2 \end{bmatrix}$
RokettoJanpu:
am I understanding that right? I'm kind of at the same level in my class so I could be wrong actually
@carmine terrace this is the matrix you have at the end right?
yes that's the matrix i got
so this is your system now
yea I'm not sure how to proceed ping. I'm stuck on this
yes that's my current system
$x_1 + 3x_3 = -2 \\ x_2 - x_3 = -2$
RokettoJanpu:
this is equivalent to your matrix ^
so all we gotta do is just isolate x_1 and x_2
Ohhhhhh
$x_1 = -3x_3 - 2 \\ x_2 = x_3 - 2$
RokettoJanpu:
and then you replace x_3 with t and get:
$[-3t-2, t-2, t]$
Ping Warrior:
and then you replace x_3 with t and get:
$[-3t-2, t-2, t]$
```Compile error! Output:
! Missing $ inserted.
<inserted text>
$
l.11 and then you replace x_
3 with t and get:
I've inserted a begin-math/end-math symbol since I think
you left one out. Proceed, with fingers crossed.
LaTeX Font Info: Try loading font information for U+msa on input line 11.
(/usr/local/texlive/2018/texmf-dist/tex/latex/amsfonts/umsa.fd
File: umsa.fd 2013/01/14 v3.01 AMS symbols A
moment of truth, punching in the answer now
oh god idk how to use the bot but that should be your answer lol
good shit dude, you had it the whole time just didn't know
best way to be stuck imo
$x_3 = t, -\infty < t < \infty, \text{ your solutions are }(-3t-2, t-2, t)$
it honestly is.
whats your major?
RokettoJanpu:
so whichever variable is free from row 1, that's the value I solve for?
comp sci
I missed class so I fell a little behind
if you can express the other variables in terms of a single other variable then let that variable be free, set equal to t or whatever, done
whenever you can (and must) express a variable in terms of another, the one you're letting "vary" is free
alright sweet, thanks.
like y=2x
x is free and that eq can probably be expressed as the augmented matrix [1 -2 | 0]
if x_1 = 2x_2
does that work, roketto?
now I can use that to mess with my non-math major friends
it makes more sense guys thanks.
no prob
Just two more problems to go
GL man. I spent like 6 hours on linear alg homework the other day, takes way too much practice and paper
Thanks, I have a quiz tomorrow, but I'm pretty sure it'll be easier
GL fam
$rank(M)=1$\
Prove that $trace(M)^k = trace(M^k)$
Nguyễn Thành Trung:
if dim M = 1obvious, if dim M =n and rankM = 1, then it's possible to write it in a form that only first row is non zero, right?
Didn't you already prove that if rank(M)=1, then M^2=trace(M)M in an exercise you asked about previously?
woops
I just remember that
i prove
M^2 = trace(M).M
ahhh
well
then we can trace both side
so we get
trace(M^2)=trace(M).trace(M)=trace(M)^2
Yes you can also use M^2=trace(M)M to prove by induction the statement above for all k
$rank(A)=rank(A^2)=1, rank(A^3)=?$
Nguyễn Thành Trung:
I think the solution for this problem is 1 >= rank(A^3) >= 0
am I right?
ah no
I think rank(A^3) = 1
because if rank(A^3)=0 implies that A^3 = 0 => trace(A) = 0 because A is nilpotent matrix
But A^2 = trace(A).A = 0, rank(A^2) = 1 contracdict
I think it's true in general that if r=rank(A^m)=rank(A^(m+1)) for some m, then rank(A^n)=r for all n>=m
You can prove it I think. When we take powers of an endomorphism, the kernel can only get bigger or stay the same. If the latter happens, it keeps staying the same
For instance take ker(f)=ker(f^2)
Then ker(f^2) is a subset of ker(f^3), but we can also prove the other inclusion
hm..
I think that we always have
ker(A) <= ker(A^2) <= ker(A^3) <= ... so on
do I misunderstand?
No that's correct, but assume for a moment ker(A)=ker(A^2)
Then let us take a vector v in ker(A^3)
A^3(v)=0
Nice lol, you proceed then
let me try
A^3v = A^2Av = 0 => Av in ker(A^2) = ker(A)
=> A.Av = 0 <=> A^2v = 0 => v in ker(A^2)
=> ker(A^3) <= ker(A^2) => ker(A^3) = ker(A^2)
is it right?
Perfect
and if we keep continue then we have
The same thing can be done in general for m,m+1,m+2
ker(A) = ker(A^2) = ker(A^3) = ... = ker(A^something)
Yes right
I'm a bit confused
is ker(A) means null(A) right?
because in rank nullity theorem they said rank(A) + null(A) = n for A is mxn
Uhm null(A) in that case would be dim(ker(A))
But normally I saw null being used to denote the null space of A
So if I'm not wrong normally null(A)=ker(A)
rank(A) + dim(null(A)) = n for A mxn
$A^2 = A$, show that $rank(A)+rank(I-A)=n$
Nguyễn Thành Trung:
this's how I do
A^2 = A <=> A(A-I) =0
rank(A) + dim(ker(A)) = n
<=> rank(A) + rank(A-I) = n
<=> rank(A) + rank(I-A) = n
is it right?
just a bit confused that
I don't know how to show rank(A-I) = dim(ker(A)) though I know A-I in ker(A)
ah well
we also have
A in ker(A-I)
Ok yeah I agree
There's also an important theorem for which since A(I-A)=0, then V equals the direct sum of Ker(A) and Ker(I-A) if I'm not wrong
That would as well solve it I guess
so
AB = 0 then ker(A) + ker(B) = V?
right?
dim
dim(Ker(A)) + dim(Ker(B)) = dim(V)?
Bye, sleep well!

Take a screenshot
These images aren't helping us understand your problem.
I told you to take a screenshot
Um. Is this a test?
In the video, it seems to say "Quiz"
In which case, no. We will not help you on a test.
And asking is actually grounds for being banned.
Can someone link me to a proof of why the pivots column of a matrix leads to one forming the basis vectors
I cant seem to find it
basis vectors of what
basis vector of the column space
of the matrix
wait
I think khan academy has one
I'm unsure if its a proof tho
Does anyone know of a good linear algebra book? Preferably a PDF
What level and flavor? Intro? Advanced?Applied? Pure?
Well I'm trying to learn it for programming, if that helps
So intro applied might be suitable for you
I'm not new to linear algebra though, I do have a pretty good understanding of matrices
Linear algebra and it’s applications by Gilbert strang can be a good for you as well
I would think an intro to applied would still serve you well
Alright, I'll look at those
Where should I look if I'm interested in learning about quaternions?
Alright I'll read that one then
Oh hell yea I just found the old one I was reading in my history
I didn't think I would be able to
Is this one good for my purposes? http://148.206.53.84/tesiuami/S_pdfs/Linear Algebra Done Right.pdf
"Linear Algebra Done Right"
Hi, is there an applied linear algebra textbook in a PDF that I can reference to?
LA Done Right is a pure approach
What does that mean?
I don’t know how useful that will be for you
Pure meaning lots of theory and not too much talk about numerical examples or applications IRL
Oh alright
what's the downside tho
hey can anyone have a quick look at this just to make sure I have everything right
ty
<@&286206848099549185> ^ ty
It'd be better to take screenshots and post here. I doubt anybody would even bother to download that pdf for you.
Pretty big document to ask us to look at lol
Can be made shorter
ye will do
I just write everything down and shorten it after
I just need to if it looks crank
What is it for
Since you have no citation for any of the theorems that arent proved


quite so:
Theorem 2
I mean iits obvious
I'm just saying
Idk what you're writing this for
can I just put it as definition
my own notes
so I get it q_q
Ah
Then you can do whatever you want
From the long exposition for definition of vector space
I thought you were giving it to students
I need to practise writing properly lmao
lmao
these are personal notes?
ye
ahh
When you are writing more seriously
You arent expected to cite or reference something so simple
Some things are taken as obvious
k ty
any other obvious problems?

ty for helping btw n.n
No looks fine
And now you know integrals are linear
Take this knowledge with you to measure theory and probability please
yeet ty
I am having issues with the greatest integer function, is it appropriate to ask my questions in this channel?
Is it a good idea to take linear algebra and calculus 2 together at same semester ?
@untold quiver i took calc 3 and linear alg same time
was completely fine just to hw, no outside time should be needed besides that
just do the hw**
I am a computer science major so I don’t need cal 3 or cal 4
if youre in a good enough Uni/College you will learn cal 1 to 3
Cal 4 is differential equation
no
Differential equations are just differential equations
no such thing as calculus 4
very weird indeed
Hardest to you
linear algebra isnt so bad
its actually pretty useful for computer science
for : Show that a subspace of a finite-dimensional vector space is finite-dimensional.
can i just simply show that given a vector space V of dimension n, the dimension of any subspace w of V is at most n
therefore it has to be finite dimensional as well

would this be just |x|
i was thinking let $f_{x_1}(x) = 1 <-> x = x_{1}$ and 0 otherwise would be a basis for $x_{1},..x_{n} \in X$
Victoria:
I don’t believe that works
Let B be a basis
Oh wait sorry read that wrong
But no in general this shouldn’t work
Let K be of dimension larger than |x~
|x|
Then each constant function to a basis element
Is linearly independent
But this is already bigger than |x|
But these functions I’ve described aren’t enough either as we can consider functions that aren’t aren’t constant
Let me know if you want another hint @jagged saffron
Uhh
Say i have a function that maps f(x_1)= k_1 respectively for 1..n
Then its just the linear combination k_{1}f{x_1}+....
Isnt it?
x2 + y2 + 6x + 2y + 6 = 0 , would anyone be able to walk me through completing the square?
Ryan this is both the wrong channel
And someone is already talking
Be respectful
Anyway
Anyway Victoria
Is k_1...k_n a basis for k?
You need to be able to make every function
K_n are arbitrary values
In K
I can generate any function with the basis i described can i not?
Do you have a counterexample cause im not sure what is wrong with it rn
We are considering k^x
Can you re-describe your basis
Victoria:
Yeah
Mm, I think you answer is correct Victoria. Moreover, in the question K is probably meant to be a field. But in general, if K was a vector space of finite dimension over some field, then dim(K^X)=dim(K)|X|
Let our basis be $ f_{x_1}..f_{x_n}$ where
Victoria:
If I am not wrong, also, in general if X is a finite set, A^X can be given the same structure of A^|X|
I think in general the answer is |X|^dimK though
Functions from X to the basis
Where the basis is 1 here
But maybe we can do better
Mm, no because it would then be isomorphic to K^|X|, which has dimension dim(K)|X|
About the dimension?
The thing I was saying is true is the structure one
Yeah dimension
Oh
No i see it
My suggestion isn’t linearly independent, you just need the same collection that Victoria described but let 1 vary of the basis of K instead
Giving dimK * |X| yeah
After all it's like taking
|X|-uples of elements of K. In case K has infinite dimension, probably instead isomorphic to K itself?
Assuming choice
I think that works
because your vector space is defined by its cardinal basis
And that shouldn’t change the cardinal
I see, I was thinking a similar thing
I’m only half sure that works though, functional analysis has a tendency to mess w intuition
Hello
im not sure if this goes here
but
How can I find out at what point a line crosses the x axis?
yeah
Plug it in
im doing a velocity graph
Doesnt the zero matrix exist in every subspace
For 5,q2) why does the intersection of u,w is empty
Im trying to show if v is in both u and w, then 2v is not uniquely expressible as it can be 2v+0 or v+v or 0+2v
But i was thinking, doesnt 0 matrix exist in both u,w always?
But if the intersection contains only zero matrix, then this holds right?
That’s a typo for sure, it means what you think it means
Go to #prealg-and-algebra Fernando
And @ me
hi guys
how may i find a group of markov matrices that give the same steady state
with respect to this challenge problem
im supposing that im suppose to work backwards but i have no clue beyond that
i think u mean diagonalising a matrix to find its steady state but its asking for matrices with a particular steady state
@pallid swallow
(1,-1) is regardless an eigenvector, the condition determines the other eigenvector (up to multiples), which turns out to be (3/2, 1)
So if the matrix is [(x,y),(1-x, 1-y)] with 0<=x,y<=1, then we get y=(3/2)(1-x) with hence the condition 1/3 <= x <= 1 @indigo cradle
If the eigenvalues of A are k1, k2, ..., k(n), are ALL the eigenvalues of A^2 necessarily k1^2, k2^2, ..., k(n)^2 ? Do A and A^2 always share the same eigenvectors?
^ I'm asking this because I'm trying to understand why trace(A^k) is the sum of the eigenvalues to the power k.
Isn't it alao becasue then in some basis you have an 'identity' matrix with eigenvalues on the diagonal?
then you can easily take it to any power
that said, if v is an eigenvector of A², that doesn’t mean it’s one of A. consider rotation by 90 degrees in ℝ². the matrix representing that map has no eigenvectors at all, but its square, rotation by 180 degrees maps every vector to minus itself, and so every vector is an eigenvector with eigenvalue -1
(of course this is mostly a consequence of ℝ not being algebraically closed, said rotation matrix {{0, -1}, {1, 0}} does have eigenvectors over ℂ and the eigenvalues are ±i, which indeed squares to -1)
@broken hawk thanks a lot! That solves it.
(I believe in ℂ the implication should hold both ways but don’t quote me on that)
I know that if the matrix is not invertible though, every eigenvector of A^2 is one of A. I mean that one I can see why it would be true.
ive had a very similiar question on final LA exam lol
xD. Yeah it would be a good exam question haha.
I was thinking of looking at the Jordan normal form representation of the matrix. That would probably show it off.
wait what is the claim? if A is not invertible, then every eigenvalue of A² is one of A?
No.
I mean that’s already false cause of a missing square somewhere
Wait I'm asking in general. But I know it's true if A is not invertible.
Eigenvector also
Not eigenvalue
Sorry I corrected it.
I’m not sure how invertibility comes into play though, consider the matrix $A = \begin{bmatrix} 0 & -1 & 0 \ 1 & 0 & 0 \ 0 & 0 & 0 \end{bmatrix}$. This is not invertible but otherwise it should give the same issue as with the 2D case
Sascha Baer:
Well assuming we are in a closed field though.
oh
Invertibility comes into play through minimal polynomials.
Oh nevermind. I was wrong about that
Lmao
For some reason I thought that if A satisfies some polynomial which doesn't have a constant coefficient then so should A^2. That's not generally true though haha.
Well it is true if the minimal polynomial of A does not have any term of odd degree.
For example if the minimal polynomial of A is of the form: x^2-1, then the minimal polynomial of A^2 divides x-1, which means A^2 necessarily shares the same eigenvalues.
no
because det(A-D) need not equal 0
let A = diag(1,2,3,4,5,6) and D = diag(2,3,4,5,6,1), for example
A - D = diag(-1,-1,-1,-1,-1,5), whose determinant is certainly not zero.
hey can anybody help me with this, it's part of some practice questions and i'm not too sure how to do it https://i.gyazo.com/3316deda404f7430d2fb6f4b08142944.png
{kind=link}

i'll offer a first step, what happens if you take z1,z2 to be real numbers
hey guys, i coudl really use some help on this
i know to find the domain you gotta focus on the bottom portion of the fraction
,w zeroes of x^2 - 10x + 24
so, what does that mean?
Oh, you put an interval in
@surreal horizon that the roots of the denominator are 4 and 6
The function can't be evaluated when x=4, 6.
so what should i put :/ i understand all that but what of the domain
so I thought that det(A^k) = (detA)^k but I seem to be running into an issue with this matrix
unless I made an error, I'm getting A^3 = I_3
and det(I_3) = 1 since its triangular
oh nvm I see it now
detA is 1 by a very easy cofactor expansion
now it makes sense
Yep
I've just started learning lin alg, so this question might be kind of basic. We're given the following matrix A and vector u, and the question I'm trying to figure out is how I would modify A to make a new matrix called B so that Bu is the projection of u on the y-axis
im just stumped on how i would go on about to modify A
im not sure what you mean by "modify A", but understanding this might help:
$\begin{pmatrix} 1&0\0&0 \end{pmatrix} \begin{pmatrix} a\b \end{pmatrix} = \begin{pmatrix} 1\0 \end{pmatrix} a + \begin{pmatrix} 0\0 \end{pmatrix} b$
kxrider:
okay what i mean is that A is supposed to be adjusted to a new matrix B that is supposed to be [0 b] (vertically)
like, adjusted by row operations?
i guess, all ive really learned that could help was transposing but it doesnt help me here
well, you know what matrix you need: $\begin{pmatrix} 0&0\0&1 \end{pmatrix}$. You could apply transformations that switch the columns of $A$ and the rows of $A$
kxrider:
maybe think about the matrices that you could multiply to the left/right of A that do this
Ho Ho i made it through the first 3 weeks of linear algbra ;p
anyone else just getting to upper & lower triangles ?
well, if there's a question, just ask
hello could anyone give me a hand with finding a model that shows tax in terms of price
what does it mean for S to be directly proportional to p?
Also, this is closer to precalc than linear algebra
ah sorry its listed under linear variations in my course
it just means it varies directly
so if x varies directly/ is directly proportional to x
it would look like y=cx
c being a constant variable
constant variable is kind of an oxymoron but yes c is a constant
so in terms of the variables in your question...
like for the 2nd half of the question
i found the tax was .07
290 x .07
=20.3
+the orginal 290
just take it one step at a time
construct an equation involving S and p using the fact that S is directly proportional to p
s=p.07 ?
S(p)=0.07p might be slightly cleaner way of writing it
because some people would misinterpret . as multiplication and some computers might misinterpret 07 as octal
well being directly proportional only gives you a c, not 0.7 or whatever