#linear-algebra
2 messages · Page 20 of 1

what was the original matrix

All i get is sign errors on like two elements, and in some other exercises, i get it right using the same method.
this can probably be chalked up to arithmetic fuckups
Hmm oki, are you able to spot any errors? I have double checked and cant find anything
this is from the same standard matrix i posted above
I legit cannot find anything wrong. Just completed another exercise using the same method and got it right..
it was just arithmetic errors. I was calculating it wrong. Used a more secure way to write everything out now anyways, ty for help
Ye that is what i got and is thr correct answer. My problem was that i do it to quickly, and when i write matrix of minors, i some times miss the negative sign completely. I basically write each one one step of the time now so i dont fuck it up ^^
But ye. That answer you posted is correct
xD
Your can always do the quick check: does A(A^{-1})=I ?
“Quick” 😛
If unless you had a calc and your elements are all numbers, then calculator is faster
Even by hand, it's pretty fast
Faster than finding the solution in the first place, certainly
Yeap
Really? I use that a lot tho
Never seen someone write down 9 separate 2x2’s lol
I always jsut put identity matrix of the same size and just reduce until I get the identity on the left. Thr right one is the inverse
and it works for any dimension
I always do that too
That was longer right?
[A I] ———> [I A^{-1}]
depends, but that method above works onkly for 3x3 and needs remembring lol
Longer, yes, but works for any dimension? Yes
Yeah
hi guys
Yes?
im trying to find out why the answer says the nullspace is a plane
when the answer itself says that the nullspace matrix will have n-1 columns
i can only see the nullspace being a plane if n=3
Some higher dimensional plane then
doesnt plane mean 2d
That’s the one we are most familiar with
I guess it’s harder for you to accept the higher dimensional stuff though
Like in 5D, the line is 1D though it has 5 components. What’s left is a 4D hyperplane. It won’t fill all of R^5 since it’s only got four dimensions to it, but it covers this “plane” of sorts
No, plane is 2d
'kinda'
plane is span of 2 lin independent vectors
@indigo cradle not sure why the answer is like that, I also think its only if n=3
welp k thanks for the assurance
Oh, that formula for the 3x3 inverse comes from Cramer's Rule
whoa lol, I would recommend against that for higher order matrices
M has three distinct eigenvalues. I need a hint to show that the corresponding eigenvectors are linearly independent.

Mathematics Stack Exchange
How can I prove that if I have $n$ eigenvectors from different eigenvalues, they are all linearly independent?
hi guys
can i have help making sense of this
R being the row reduced echelon form
Let E be the composition of row operations that gets A into rref, and F be the composition of row operations that gets B into rref. E and F are necessarily invertible. Then we have
EA = FB = R
A = (E^-1 F)B. E^-1 F is also invertible.
np
how do i approach this
the answer says this
but "A = (pivot columns)(nonzero rows of R)" didnt come up in the notes or the lecture video
im not sure what thats about, but I don't think you need that fact to come up with the answer. For A, the first two columns are linearly dependent, so you can split the matrix between the 2nd and 3rd columns. similarly for B.
Yeah that's the easy way of doing it
Yes, but that's might be because of the way you phrased it
Oh lol I'm being stupid
Yeah they could be different
Let me find a good example
There's a very trivial way
Let the intersection be {0}
And let Q_1=P_1, Q_2=P_2
Yeah that does it
@golden cloak
Once you see this example, you can make lots of other examples
can you give me one please, because i can't see non-trivial ones
Just add a basis element to basis of both P_1 and P_2
oh
lol this is why i love this server, alone by myself i would think about it way to long and there would always be something you can't grasp atm
ty
🐴
So this is the rref
Writing the solutions in terms of the free variable x3 I get x3 (4 3 1)
(sorry for bad notation)
however this is what the answer key says, how did they get to R^4 when the matrix is only in R^3
@clear drift
The matrix takes vectors in R4 and maps them to R3. Since you're looking for vectors that map to zero, the answer will naturally be in R4
so are you just supposed to solve Ax=0 and add an extra zero row to go from R3 -> R4?
ohh
I'm stupid yeah it should be in R4 because it must have 4 columns to be able to multiply A by it.
You are supposed to solve it, easiest way is to assume a vector [a, b, c, d]
Gotcha thanks.
hello, i have a matrix of size 2 X 3, and it is the linear transformation mapping from R3 to R2, and i have bases with the dimensions of 3 X 1
the result i get when i multiply the 2 X 3 with 3 X 1 matrix is a 2 X 1
and i know i have to take the coordinate vectors , but i end up getting something like this:
What's the problem you're trying to solve?
[5
13] = a [ 1, 1, 0]^Transpose + b[0 1 1] ^T + c[1 0 1] ^ transpose
is it possible to calculate the change of basis matrix?
cause the coordinate vector equations i get are
a + c = ?
a + b = ?
b + c = ?
how can i solve that when my result is [5 13]^ transpose
What do you mean change of basis matrix? What are the two bases between which you are trying to change?
so I have a matrix A which is a linear transformation mapping R^3 to R^2
Okay
and was given bases { [1 1 0]^T, [0 1 1]^T, [1 0 1]^T}
i have to find the matrix representation of A with respect to those bases for R^3
that was the question
Okay
my approach was to take the matrix A and multiply it with each of the bases
and compute the coordinates with that
So can you write the change of basis matrix from R3->R3 changing from the standard basis to that basis?
so for instance I get [5 13] ^ T = a[1 1 0]^T + b[0 1 1]^T + c[1 0 1]^T
A is right now written with respect to the standard basis
yes
i know the other way i could do it is by using C^-1 * A * C where C is the matrix representation of my bases
but then i have the dimensions don't match! C ^-1= 3 X 3, A = 2 X 3 and C = 3 X 3
Let's call the matrix you want to get B
B is supposed to take a vector written in terms of the new basis, convert it to a vector in the standard basis, and then transform it using A
thats what i was trying to do, but the dimensions are not lining up :(
So you have Bv = A C v
where C is the change of basis matrix from the new basis to the standard
We only know the change of basis matrix from the standard to the new
in this case what is v?
what if i wasn't given that arbitrary vector but was instead just told to transform the matrix A in T(x) = A(x)
I never said you were given a vector
That would make it the very opposite of arbitrary
What I was trying to explain is that B = AC, but if you don't understand the definition of equivalence of linear transformations, then that's a problem
And you didn't mention the other basis
In that case, B = DAC for suitably chosen C and D
C changes a vector in the new 3-dimensional basis to the standard basis
D changes a vector in the standard basis to the new 2-dimensional basis
Oh I see, i think i didn't understand equivalence of linear transformations well enough! Will be looking into that again! Thank you @wintry steppe
guys, i've been trying to understand these math concepts for a few hours but i still can't understand them :(
@wintry steppe do u know what they do?
ah, right, sorry for that. the first one gets the two vectors' X axis and multiply them and then sum it with the product of the two vectors' Y axis
the second one is the same but it subtracts instead
and the last one is the same as the first one but instead it takes the square root of the answer
well yea, but do you know what they mean geometrically?
oh wait nvm
uhh, the first one i think it's dot product
or so what i was told
idk about the rest
cross product maybe?
okay well the important thing about dot product is that if you have two vectors $a$ and $b$, then $a\cdot b = \lVert a \rVert \lVert b \rVert \cos{\theta}$ where $\theta$ is the angle between the two vectors. If the vectors are perpendicular for example, then the dot product is zero. $\newline \newline$
The cross product between two vectors $a$ and $b$ returns a vector $a \times b$ which is perpendicular to both $a$ and $b$. In that code though, those are 2D vectors. What that code is doing is pretending that the third component is zero and taking the magnitude of the vector that would be pointing in the non-existent third dimension. Basically, cross product follows this identity: $\lVert a\times b \rVert= $\lVert a \rVert \lVert b \rVert \sin{\theta}$. So if the vectors lie on top of each other, then the cross product is zero for example. $\newline \newline$
The last one is literally pythagorean theorem. @wintry steppe
uhh, the bot didn't work

what are these two lines between each other
that means the length (aka magnitude aka norm) of the vector inside the bars
do the vectors have to be intersecting each other
the concept of vectors intersecting doesn't really exist. As far as you are concerned, they are just arrows with length and direction. Typically, when you think of these operations, you place the vectors tail to tail
again, the concept of origin doesn't really exist.
for the geometric purpose of these operations, its convenient to write them like that
ah
isn't |a| the modular operation?
so it can't be a negative value
but what is a and b? the length of the vector?
oh xd
^ in case you haven't seen that, that is how we usually represent the sum of two vectors
the dot product
If I can just add something, a vector is every set of points that are "of the same length" and "of the same angle" with respect to coordinate system.
here, this two top vectors are the same vector, as 2 = 2 anywhere in the equation
huh
-a is negative vector
wherever on the plane you find set of points with that length and angle
it represents the same vector
so a vector is a set of all such "lines"
i see
so, why not choose one which starts from origin?
but what is the X and Y of a vector?
if you represent a vector using the coordinates on x and y axes, then for a vector a, a.x just refers to the x coordinate and a.y refers to the y coordinate. Its assumed that these vectors point from the origin to the point (a.x, a.y)
like with fractions, you almost never write 6/12 to represent 1/2
but fraction 1/2 is really a set of all pairs (a, b) such that a/b = 1/2
hold on
if a vector is a line, then where is the X and Y? at the end of it? at the origin?
wait ill draw it
conventionally, it points from the origin to the (x,y) coordinate. So the arrow lies on the (x,y) coordinate
ah, i see
but
why would i want to do this?
(vec1.x times vec2.x) + (vec1.y times vec2.y)
which is the dot product
its kinda complicated why that works lol. You would "want" it because it equals ||a||||b|| cos(theta) and knowing the angle between vectors is useful.
it's multiplying cos(theta)?
well, and also to calculate something called a "projection"
yeah
but here's a hint: your vector a is a sum of two vectors, one which lies on the x axis and one which lies on y axis
so we can kinda decompose any vector into two vectors (here 2 because this is 2D)
the vectors are (x_a, 0) and (0, y_a)
is that ok?
... i'm screwed
i need 3D vectors to solve my problem
but i don't even understand these basic concepts
hold on
I mean, simply put

you really need to understand how the object moves in a vector space
how do they move in a vector space?
consider 2D case
say that ball is centered at the tip of the vector a
how would you move the ball left/right, parallel to x axis?
what you need to change?
uhh
what would happen?

Hint: coordinates
uhh
you kinda skew it
consider a unit circle at the origin
your two vectors will cross it somewhere, right?
yeah
so from the crossing points, you draw normals on x axis
and consider the change of angle
line which makes 90 degree angle with another line
uhh
how would that look like?
see the dot product formula
that red line would be B?
cos of each angle is a factor of stretching
so let's say the circle's center is at X and Y 1
the angle would be Pi / 4, right
so, the cos of that will be the length of the red line?
well would it be, in unit circle?
yeah
no, red line would be sin
length of it, i mean
you see that y coordinate stays the same
for 2 positions
so you need to change x coordinate of the first vector, to get the coordinate of the second
not really, but cos will appear there
that's for two vectors, not the coordinates of one vector
nvm i misunderstood you
but you really need to understand this nicely
to be able to grasp what you need to do
"Algebraically, the dot product is the sum of the products of the corresponding entries of the two sequences of numbers. Geometrically, it is the product of the Euclidean magnitudes of the two vectors and the cosine of the angle between them. These definitions are equivalent when using Cartesian coordinates. In modern geometry, Euclidean spaces are often defined by using vector spaces. In this case, the dot product is used for defining lengths (the length of a vector is the square root of the dot product of the vector by itself) and angles (the cosine of the angle of two vectors is the quotient of their dot product by the product of their lengths). "
why multiply though
like
if you multiply a vector by another, assuming they have different length, won't that be a rectangle
a * b is what then
which represent their coordinates
from the "origin"?
its the expression which tells you you should multiply coordinates of the two vectors in some way which tracks the notion of angle between them
and their lengths
yeah, always from the origin
you have two vectors, a and a_0
a_0?
yes the one you get after moving the ball
now, "the cosine of the angle of two vectors is the quotient of their dot product by the product of their lengths"
I mean, noone can really help you understand it unless you go through it yourself
how do i go through it myself
uh, but like
let's say i wanna do the dot thing
but i don't know the angle
how am i supposed to get the angle?
you have coordinates of each vector
arctan?
look at the picture I've sent you
oh, arccos
x times y / |x| times |y|?
but, if the coordinates are 0 or higher, it's gonna always be arccos(1)
wait wait wait
cos of the angle is equal to the length of the vector divided by x1?
1/cos of the angle
oh
so ||a||cos alpha = x_1
i see
its basically all trig
and cos alpha = x1 / ||a||
because it is 😄
aaaa this is much better now XD
so like
the dot product is for getting the angle between the two vectors?
hm how to put it
hold on
let me put this again
so the doc product of vec1 at (4, 2) and vec2 at (2,3) would be
(4 * 2) + (2 * 3)
which is 14
is that correct?
maybe... I can't really understand the code well
it just says this: (vec1 X times vec2 X) + (vec 1 Y times vec2 Y)
and the length would be the square root of it?
yeah the alternate way to do dot product is to
oh yeah...
do the x components multiplied plus the y components multiplied
so the doc product of vec1 at (4, 2) and vec2 at (2,3) would be 14, and the length would be the square root of that?
but where would the line with that length be?
nono not square root 14
how not
14 is the dot product
yeah
if u want the lengths multiplied u need to compute the length of each vector and multiply
square root of the dot product would be the length
no?
it said that in the code for some reason
nah
look closely
they are only for vector a
its the x compnent squared plus the y component squared
then sqrt that
ack i gtg
oh
from what i've seen here, the code gets the distance between the two vectors with the origin of the circle
and to get the distance, he does this:
sqrt((vec1 X * circOrigin X) + (vec1 Y * circOrigin Y))
and does that for another vec too
uhh, then it creates 4 more vectors
oh hold on hold on
the length this is wrong hold on
i read it wrong
it gets the vec1 - circleOrigin
and uses that new vector to get the legnth of it which is written as sqrt(newVecX² + newVecY²)
this is starting to get confusing
it then calculates 2 intersections like this
hold on
took a while to type it out
i don't feel like i understand this anymore
i mean, doesn't that look complex?
so the xy-plane and xz-plane subspaces are NOT orthogonal? seems kinda counterintuitive
but [1 1 0] [1 0 1]^T = 1*1 +0 + 0 != 0 so not orthogonal
they're just random vectors in xy and zx plane respectively
Yeah, my bad
they aren't orthogonal correct
subspaces that intersect are never orthogonal
Except at the origin
what
oh
yeah
ofc
subspaces whose intersection has positive dimension are never orthogonal
Random vectors 
if i have a space like this: {( (α, β), (γ,δ), (ε,φ) ) | α,β,γ,δ,ε,φ in R}, how do I call it? (R^2)^3?
is it isomorphic to R^(2×3)? whats its basis? is it
( (1, 0), (0,0), (0,0) ), ( (0,0), (1,0), (0,0) ), ..., ( (0,0), (0,0), (0,1) )?
Well it's isomorphic to (R^2) x (R^2) x (R^2)
Which is indeed (R^2)^3
And you technically can't just use like "exponent rules"
yeah I got that too
but it turns out that you can here
And it is isomorphic to R^6
I'm not quite sure what basis you were trying to write
but seems like a fine
Also, I should probably ask how you actually add points
ill write it out on paper
yes it is isomorphic to R^6 and R(2×3) but not equal to any of them I would say.
but is this the "standard basis" for this space? or the notion of "standard basis" can't be applied here?
Standard basis has no rigorous definition
So you can call it a standard basis if you want
because it can be rewriten such that 1 matches the index of a vector in basis
in my book i have a space V, dim(V)=n and space W of arbitrary dimension, a =(a_1, ..., a_n) basis for V and a map defined like this: val_a: Hom(V, W) --> W^n, val_a(f) = (f(a_1), ..., f(a_n))
and we show that it's bijection
i'm trying to give myself concreete examples
structure matters
Two vector spaces (over the same field) of the same finite dimension are in general isomorphic, so maybe that is more interesting when dim(W)=inf
@noble swallow the same is true for infinite dimensional spaces
Vector spaces are just fancy cardinals
@quaint heart Oh nice.
So there are different types of infinite dimensions?
Like Q[x] and R as vector spaces over Q are differently infinite dimensional?
@noble swallow they are the same dimension I believe. This is because they are the same cardinality and cardinality determines dimension once you are above the cardinality of your field
determinants: so if you multiply one row by ∆ and another row µ you can factor them out of the matrix?
that is ∆µ [matrix]
So if Q[x] is countable and R is uncountable, they have different cardinality and hence a different infinite dimension? That's why I was wondering
Q[x] is not countable lol
Oh wait I'm stupid
I was thinking Q[[x]]
Yeah you're right
(the set of formal power series in Q)
Q[x] is countable dimensional
What notation should I adopt to express this? Until now I have always written dim(V)=inf indiscriminately
Do you know what a cardinal number is?
Mm vaguely
The ones you will likely use is countable and the cardinality of the reals. For countable you would use $\aleph_0$ or $\omega$
Liquid:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
For the cardinality of the reals you would use c for continuum
I like omega as the cardinality of the naturals personally
Both are common
Alright, thank you a lot
(omega kinda syntactically sucks cuz it refers to both the ordinals and cardinals)
is convinced by the argument
Also a rare occasion to use the phoenician alphabet lol
Uhh a set S has cardinality κ if there exists a bijection from S to κ
$|\omega_n|=\aleph_n$
Ariana:
So we define a cardinal to be the smallest ordinal...
for ordinals it is the order type of a well ordered set, a isomorphism from a well ordered set to a ordinal
uh not rlly
Basically ordinals and cardinals are like 2 different ways of describing how big sets are, one is for describing a ordered set another is for describing (almost) arbitrary sets

In mathematics, cardinal numbers, or cardinals for short, are a generalization of the natural numbers used to measure the cardinality (size) of sets. The cardinality of a finite set is a natural number: the number of elements in the set. The transfinite cardinal numbers descr...
Read the formal definition
Lol
uhh its kinda assuming AC
usually its like $|\omega_n|=\aleph_n$ and $\aleph_n^+=\aleph_{n+1}$
Ariana:
?
Then just find the bijection from some ordinal to the cardinals to get cardinality of a ordinal
The point is, by this definition $\aleph_0$ and $\omega$ are actually equal as sets
Liquid:
Compile Error! Click the reaction for details. (You may edit your message)
So it is not wrong in any way to use either interchangeably
I don’t rlly use omega for cardinality cuz it gets confusing sometimes like
$2^\omega=\omega$ for ordinals
$2^{\aleph_0}\geq\aleph_1$ for cardinals
Ariana:
so you get funny stuff like $|\omega^\omega|=|N|$ and $\omega^\omega=R$
Ariana:
I guess in that respect you're right, the only thing I use ordinals for is transfinite induction so I don't care too much about that sort of thing
But if you do more serious set theory it might become a problem
For most people it doesn't matter lmao
well true mdr

How do i work myself in to find the formula for distance between the two lines?
for some reason, the formula for the distance is: https://gyazo.com/ec43be517f6af633552a254630c60a39

but why is it the times the unit vector of the normal vector? shouldn't it be just the normal vector?
Yo can anyone help me with Q2?
This isn't linear algebra, go to #precalculus
not really I would say
is it a good idea to take linear and calculus 2 at the same time ?
linear algebra and calc 2? seems strange
usually you finish all of calc (whatever that is to you) before moving onto linear
if it's not linear algebra, then don't post here lol
prealgebra is the better fit
I'm working on preparing for a makeup final exam (I caught serious pneumonia late in the term), and I've only got fragmentary notes from another student (no instructor notes) and a practice exam to work from. I have a few problems that I haven't been able to connect to sections of the notes that I'm a bit lost on if anyone's up to help explain parts
For (1) I'm thinking of approaching it in two parts- first I need to show that the set of solutions is a subset of R^n, then I can show it's a subspace. Stuck on figuring out how to show subset since I missed this material entirely
Write explicitly the definition of R^n, so you can check if elements of that set are in R^n
I think the thing I'm struggling with is understanding the set of solutions itself as an object
Mat:
Just joined this server- that bot is amazing
True lol even if I am no expert at all with it
Ok, yeah I understand the definition of the set of solutions is general but I'm having a difficult time coming up with a rationale for claiming that this set is a subset of R^n. (Intuitively I think it is, but I haven't thought up a concrete proof)
I feel like I'm missing something obvious
The set is a subset of R^n as long as all x1,...,xn are in R
I already assumed this above
The question should have specified this
Indeed number 1 is actually 5 free points
Well, I still have to prove it's a subspace
Yeah that part is more interesting
in general, the set of solutions to Ax = 0 is a subspace (called the null space).
Ah, you're saying that if we view the equation as a function on vectors in R^n then the solutions form the kernel
which is a subspace
yea. its just an equivalent (easier imo) way of looking at things
How would one go about finding a basis for the kernel?
solving Ax=0
the algorithm you use to find the kernel gives you a basis for the kernel. (Where you put the matrix in rref and solve for the pivots in terms of the free variables)
Wouldn't solving for Ax=0 give the whole space rather than just a basis?
the span of the basis vectors would be the actual space
when you find the kernel, you get something like av1 + bv2 + cv3, which means all linear combinations of the basis vectors: v1, v2, v3
I don't think I quite follow
hnngh this problem is not a good example to demonstrate on, as a simple example, $$\Ker \begin{pmatrix} 2&1\0&0\end{pmatrix} \ = \Ker \begin{pmatrix} 1&1/2\0&0\end{pmatrix} $$ $$ = \begin{pmatrix} -1/2 x_2 \ x_2 \end{pmatrix} = x_2 \begin{pmatrix} -1/2 \ 1 \end{pmatrix} = \operatorname{span}\begin{pmatrix} -1/2 \ 1 \end{pmatrix}$$
kxrider:
in the case of this problem, the matrix is (2 2^2 2^3 ..... 2^n) and rref would be (1 2 2^2 .... 2^{n-1})
I would work on polynomials to find the basis for this exercise
Hmm, I think I'll sit on that one for now
Here's another that I've been unable to make sense of:
There was a class where a certain form of column echelon form was mentioned, but the notes are really vague
For part (1)
I don't think the intention was to grind out 5x5 determinants, so I'm guessing there's some property I'm missing
its kinda obvious just by looking at it, but if you have to prove it, you could write the first four columns in a matrix, and compute its null space. If the null space is {0}, then the columns are linearly independent. Does that make sense?
Yeah, I agree it's intuitively obvious- but this instructor is a bit of a stickler for rigor
Yeah, that method makes sense
or just find rref(A)
pivot columns are independent columns
you can invoke the rank
or still not enough justification?
This linear algebra course never mentioned pivot columns nor reduced row echelon form
yeah thought of that, but proofily speaking thats just like pointing to the saem thing
Here's a pic of the note I mentioned:
last bullet point
Haven't been able to decipher it and missed the class since I was in the hospital
Column echelon form is an equivalent way of solving it
As rank per rows and rank per columns coincide
column echelon is just rref(A^T) 
not sure why you'd want to do that though 
thought rref(A) and then showing the rank is 4 was enough to prove it for that professor
He said he only knows columns approach
o thats weird
Yeah, the class was taught exclusively with a column approach (plus a proof of the equivalence)
...which didn't match the book...
..which we only vaguely followed...
it was a bit of a mess to be honest
even aside from me getting sick
Strange, I think you should use the approach you prefer
It wouldn't make sense that your professor penalizes you because you adopt different pet-lines
Yeah, I'm sure I could do it either way- it's just that the class was much more confusing than it needed to be because of the inconsistency between the class and the book
oh darn 
Yeah this exam is going to be ~rough~
I taught matrix diagonalization to someone only about a week ago
I can give you the link to the posts so you can read it if you want, but it's best if you were the one I was teaching 
makes for the better experience
That'd be useful, I appreciate it
Thanks to everyone who stopped by to help out by the way!
I was present 
lol that makes me curious

Not sure if this goes in here but just wanted to ask
If two vectors are parallel (facing the same direction) and equal in magnitude, but at separate positions(maybe one vector is two units away from the other), are they equivalent?
Oh wait I googled it and they are
Can someone tell me, how the fuck P1P2(->) is equal to that most right side?

the unit vector n is 1/(sqrt(98)) in this example
P1P2(->) should be P2 - P1 ??
What were P1 and P2
sec


points where a line goes through
Line 1 goes through P1 and Line 2 goes through P2
It is P2 - P1
ye right?
this is the whole question

So you are to find the distance between L1 and L2. And they are saying that, that distance is equal to this formula: https://gyazo.com/8010c6799ab8f63d62f6c90be6ae8f50
I dont get why, isn't distance from point to plane: (Ax + By + Cz + D) / | n |
ah oki. But i still doesnt get that P1P2 (->) thing. Do you know how this is correct? This is the whole equation to answer

i can get the unit vector n but not the rest
The computations or the set up? I’m not sure about the set up myself lol. Hard to think in 3D at this time of night.
It is not even the same values i posted above, it is something wrong with that solution. It is not correct
11,0,8 turns into -11,0, 7?
joke teacher :/
It's not a joke teacher
You're just not paying attention to the actual concepts here
You cannot just do a standard pattern comparison and expect yourself to get the right answer
The distance from a point to a plane is the projection of the vector between that point and any point on the plane onto the normal of the plane
You should know how to compute the vector between two points. Second-guessing the correctness of the solution that quickly is not productive.
Ok, back for another day of wading through linear algebra
Exam tomorrow 
Can anyone think of a non-computational way of solving (1) and (2)? I'm pretty certain the problem was intended to be conceptual rather than calculational
I mean in (3), it says "without doing any further computations"
so seems unlikely that (1) and (2) are non-computational
That's fair
Based on the fragmentary notes I have, I think the first has to do with a property of column echelon form though
Or at least I have a hunch that there is a simple answer along those lines
(backstory to this being that I am making up a final exam for an abstract linear algebra class because I missed the last quarter of the class due to being hospitalized with pneumonia)
So basically I'm trying to backfill those classes from some notes I got from a classmate (instructor didn't have notes to provide)
Here's another one that I'm unable to really start on. (Normally I wouldn't present questions so vaguely, but I don't have any examples in the notes of problems like this)
is anyone here familiar with 3d vectors and coding?
I'm not sure but it might be just finding the null space since Ax = 0
for Bran's question, you just have to solve Ax=0 and look at the pivot columns
then those corresponding columns in A make up C(A)
I think I'd need to see an example to understand what you mean
playing a game, will talk more later
@native lodge no prob
Is it range space or null space?
linear subspace
so rank 1
leads me to conclude that we are looking for the nullspace
let me check if this matrix has rank 3 then
indeed it is rank three
@nimble pawn want to use vc? as this will take a bit to explain
sure, give me a sec
$\begin{bmatrix} 1&-1&5&-1 \ 1&1&-2&3 \3&-1&8&1 \1&3&-9&7 \end{bmatrix} \begin{bmatrix} x_1\x_2 \x_3\x_4 \end{bmatrix}=\begin{bmatrix}0\0\0\0 \end{bmatrix}$
⚡Amphy⚡:
ok so that's the equation system written as a matrix
you don't want to join vc?
you only have to listen and can ask questions here
Ax=0
$\begin{bmatrix} 1&2&0&0 \ 0&0&1&0 \0&0&0&1 \0&0&0&0 \end{bmatrix} \begin{bmatrix} x_1\1\x_3\x_4 \end{bmatrix}=\begin{bmatrix}0\0\0\0 \end{bmatrix}$
⚡Amphy⚡:
$x=\begin{bmatrix} -2\1\0\0 \end{bmatrix}$
⚡Amphy⚡:
If you are unsure if this in indeed in the null space, just multiply Ax and see if you get the null vector to confirm
maybe
i got this
S= {(1,-2-0-1) (-1,0,0,-1) (1,1,0,0)
and T= {(x,y,z) ∈ R^4 / x-2y + z - w= 0}
find Dim(S+T)
I have no idea what to do 😦
S is probably the span of those three vectors?
S is a space
S and T are subspaces
well a set of vectors that span a space
and a subspace at that since the space is R^4, yet we only have three basis vectors
I mean are you sure that in your question you don't have //
$S=span{v_1,v_2,v_3} $or$ S=<v_1,v_2,v_2>$?
ok i think its pretty clear he means span...
Mat:
Are you confindent on what span means and hence S is constituted of?
Y. for S, if you put the columns in a matrix, and compute the ref, the linearly independent columns make up the basis for the span of the columns.
@noble swallow its written with {
No span mentioned? That's weird
Do you know the formula for the dimension of the sum of two subspaces?
dim(S+T) = dim S + dim T - dim (S∩T)
Awesome, have you any difficulties at finding dimension of S and T ?
not really
my problem is the S∩T
let me try to translate whats my real problem
when i find the basis of S
Ok tell me
I have to find the Cartesian equations
That is a possibility
what can i do if my base is: (1,0,0,0) (0,1,0,0) and (0,0,1,0)
or
(1,-2,1,0) (0,-2,0,0) (0,0,2,0)
S dimention is 3
you can't span all of R^4, but you can span a 3 dimensional subspace
it's near impossible to imagine how that looks though
so then dim(S)=3
Take the basis of S, put it in a matrix with a vector (x,y,z,w) and impose that the rank is 3
To find the cartesian equation of S
do u guys know a good page for do that? also i need to learn how to find the equation without computers
This is the common way to go from span to cartesian equation
It's a bit long to explain the process here, search on google "from span to cartesian equation"
Howevere this is not the only way to deal with the exercise
i dont know hwo to make a cartesian equiation from a canonical basis
really? if u know another way please tell me haha
im tired of searching
k
Have you done?
2? What did you do after the linear combination?
Just write λv1+μv2+ηv3
Where v1,v2,v3 is the basis of S you have
That's a generic vector is S
(x,y,z,w) = λ(1,0,0,0) + μ(0,1,0,0) + η (0,0,1,0)
x = λ
y= μ
z = η
w = 0
(x,y,z,w) = λ (1,-2,1,0) + μ (0,-2,0,0) + η (0,0,2,0)
x= λ
y= -2λ -2μ
z= λ + 2η
w= 0
so i can get something like
μ = (y + 2x)/ -2
and η = (z-x)/2
That is probably correct, but why are you using that basis? Did you find it previously?
What is the basis of S? The second one?
both are
the second one was the first time i tried to solve the problem
i found that, the first time i tried, lol
The almost canonical basis is a basis of S?
yes
its okay if i have 2 equations?
from the second one?
or should always be only 1?
Mm that's a curious coincidence but I have nothing to write with to find it out myself, however in general one puts the vectors of the span in a matrix and reduces it with Gauss elimination, maybe you have used this approach
Let's choose the first basis at this point
"(x,y,z,w) = λ(1,0,0,0) + μ(0,1,0,0) + η (0,0,1,0)
x = λ
y= μ
z = η
w = 0 "
We continue from here
Now sub this form of x,y,z,w into the equation of T
We enter the intersection now
what i do with those values?
x-2y+z-w=0
This is the equation vectors of T must satisfy
Impose it for what you found, which is a generic vector in S
Sub λ,μ,η in it
You can also think of it in terms of orthogonal complements
Let A be a subspace and A^C be its orthogonal complement
A vector is in A iff it is orthogonal to all vectors in A^C
A vector is orthogonal to all vectors in a subspace iff it is orthogonal to all vectors in a basis for that subspace
So let v1, v2, v3, ... be a basis for A^C. Your equations are then just that v1 dot x = 0, v2 dot x = 0, ...
😄
Finding a basis for A^C is as simple as making a matrix of row vectors that span A and finding its null space
ty guys
does
1 1 0
0 1 1
0 0 1
count as an upper triangle?
even though its got a 0 in the top right?

Dimesion of a subspace w={(x,y,z,t): x+y+z+t=0, y+z+t=0} Of R^4 is?
What are you confused about?
How did you approach it
Certainly by not planting Bitcoin crops
Each linearly independent equation constrains the subspace by one dimension, so if you count them with your toes, you get the answer
Do u learn about eigenvalues and eigenvectors in 1st year uni?
in europe, yes
I got to linear my second year in US while some had it first year, just depends on the math classes you have to take
also i was assuming math major
linear is first year for me
LA tends to be first year for most math majors
^ it’s also essential for a first course in analysis
sure
my uni has a course where it's lin alg + intro to analysis
so i'm assuming it's kinda fundamental
If you don’t understand LA you can probably fake your way through analaysis 1
But analysis 2 will be brutal
To be honest pretty much every field of math relies heavily on LA or LA-derivatives
yup
I mean, if you dont kinda understand LA then you probably wont understand analysis 
I need to learn some proof based Linear Algebra 😔
you mean linear algebra
if it's not proof-based, it's matrix-bashing, not linear algebra
I disagree Ann, LA is fundamental in things like ML
But you can get by without understanding abstract vector spaces or proofs
I’d say it’s gate-keepy to argue that approximations and numerical techniques for solving LA problems isn’t “real LA”
numerical linear algebra is one thing
a semester full of nothing but 6x6 gaussian elimination problems is another
There are other meaningful computation based things you can do
That are done in that sort of first course
right, but i dont really hope most of the people interpret "non-proof based LA" as numerical LA rather than just matrix bashing
heehee guass was pretty much the only thing in my first la course lol
matrix bashing
Mine is def proof based 😅
That said, does anybody recommend any supplementary study resources? I’m taking it over the summer as well as Calc 2 plus working full time at a startup. Calc 2 is going fine but I’m definitely behind in LA.
khan academy has LA videos
i haven't watched too many of them. I think there are some proofs, but mainly I think Sal just does a good job of getting the point across.
Some other resources you could try is MIT opencourseware's series on LA by Gilbert Strang, or reference books like Linear Algebra Done Right or Linear Algebra Done Wrong.
and the discord server ofc 😎
This is going to be a long, math filled weekend 😝
i think khan academy helped me a little bit when i was going over some specific things, but it wouldn't give you that much help if it's proof based
strang’s course is wonderful
but it is much more matrix bashy
especially at the start
strang is bluepilled and for engineers
my worst experiences with books is strangs linear algebra and any physics book ive read
I don’t mind his book 🤔 but it isn’t very proof based
And slightly disorganized
His prose is interesting too
Does inject a lot of his passion for the subject
exactly
no proofs= gay
And he does try to make it as easy as possible
its a good book for an engineering class or physics class but its not rigorous
Maybe if you’re just coming out of high school or in high school then it’s a great introduction
Before they force you to develop Matt maturity
*maff
sure
Looked over the Strang book a bit, and saw that there is another LA class on open courseware that is specifically described as more theoretical than the Strang course. Seems to be what I need, no video lectures though. Definitely going to go over the KA material and maybe read some of Strang’s book, but Linear Algebra Done Right seems to be what I need. I’ll also look up the Hoffman/Kunze book.
So if there are more columns than rows in a matrix (basically more vectors than the dimension of the space they’re in) the columns are linearly dependent
How exactly does that work? Like if there are three vectors in a 2D space but the vectors themselves are 2D why are they guaranteed to be parallel?
The particular three vectors in 2d space might not be parallel (but they are certainly not all orthogonal), but at least one of the vectors is guaranteed to lie in the span of the other two.
and yes to your first question
Non-zero determinant
Also gotta be square
Cofactor matrices and a whole lot of computation
I mean Gaussian elimination has a predictable effect on the determinant that can make computation easier
But the raw computation requires you to do the cofactor computation.
ok but nobody does that beyond 3x3. gaussian elimination (keeping track of scaling rows) is fine
Google "how to compute determinant of general nxn matrix"go from here
Computers do that beyond 3x3
What are you proving?
Actually there might be a cleverer way using the notion of volume.
One way or another, its finnickity
on the one you did before, how do you know that there aren't any other vectors in the intersection?
if you want to do a determinant computation, it's a lot better to use row reduction/gaussian elimination to a triangular matrix
and then multiply the diagonal entries
cofactor expansion is far less efficient
You're doing this in a vector space right?
And I'd trust Starfall on this, I give zero-shits about making computation more expedient
It looks like your prof tried to introduce you to the notion of an internal direct sum - where you can decompose a vector space into a subspace and its orthocomplement.
well yea but a proof should at least state that. weird
Basically you want to prove that the subspaces you chose would be orthogonal and so would only contain the origin in common
wat? Orthogonal?
Obama Llama:
Compile Error! Click the reaction for details. (You may edit your message)
Basically this is only true if each u+v is unique
And you can only really do that if you construct Uo+V using the combined span of U and V
You have a sum of subsets which is the general thing on the right hand side of the equality - if each u+v is unique, we say that it defines a direct sum.
Hope this helps
iff u+v is unique for each u and v
Ye
Although the index set is redundant
Cuz
You just choose each u in U and each v in V
Why do you need to index it
Nah it doesnt
You can have non-unique sums even with indices
Basically the point is
This uniqueness doesn't happen if the intersection of U and V contains more than just 0
So now you just gotta prove this in both directions
I mean if this is elementwise addition between vectors then... yeah?
Got some weird notation going on here - you transpose one of the matrices then you just add them elementwise
,tex b_{ij} = \sum_{i=1}^n\sum_{j=1}^n a_{ij}+a_{ji}
Obama Llama:
Compile Error! Click the reaction for details. (You may edit your message)
I mean your way just ends up adding all the rows and transposed columns into a single vector though
Which is definitely not what A+A^T is
you do realize that you have two free variables here, right?
So anything that doesn't have two unbound variables is weong
Well you can just send it here
{kind=link}
The entire thing makes no sense
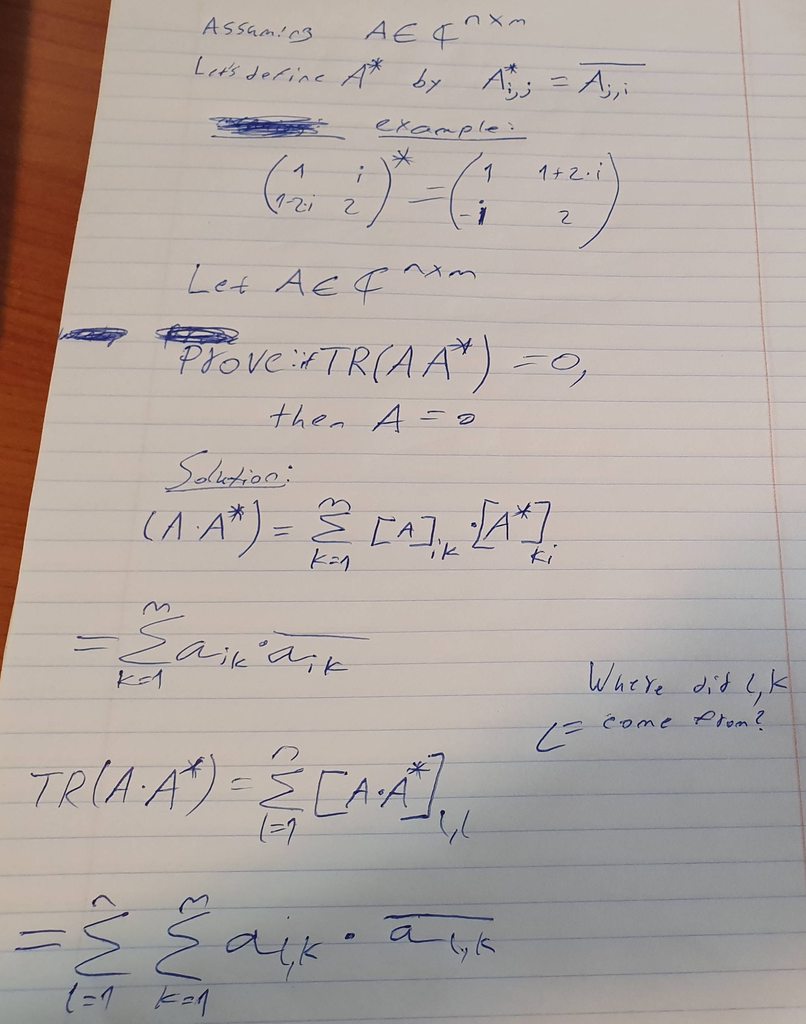
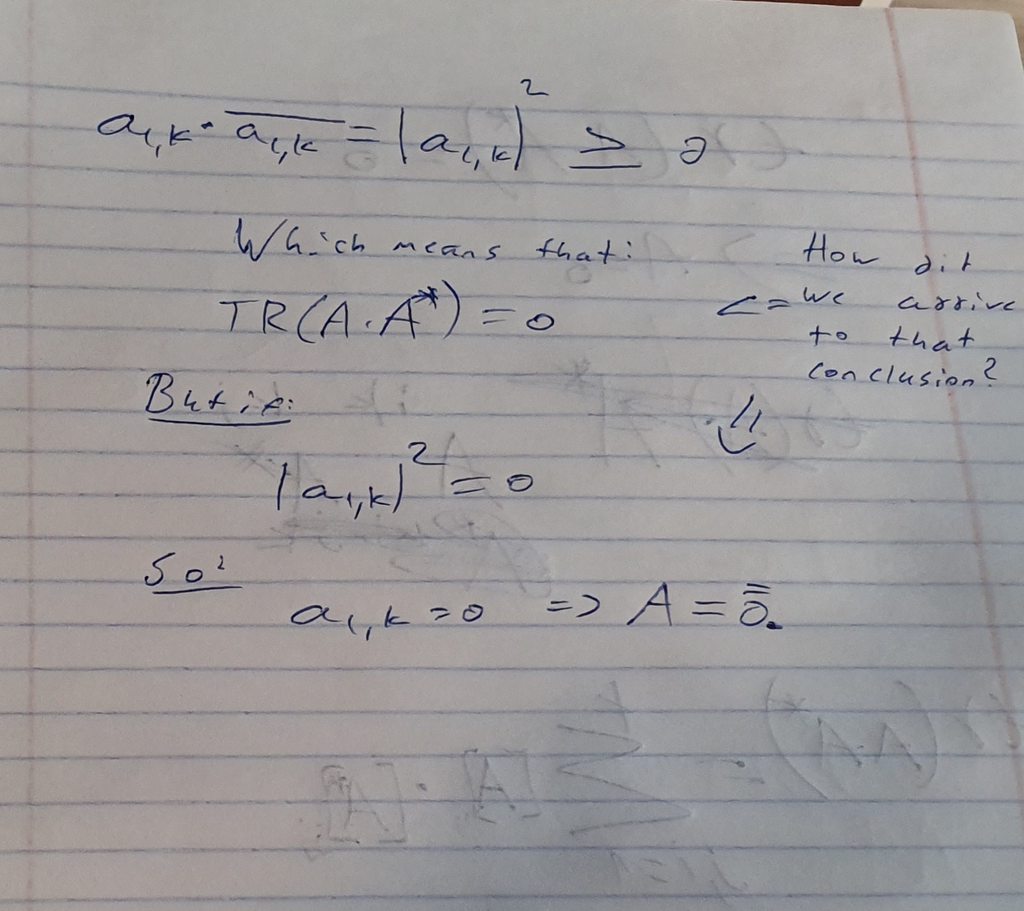
The first part is, that is the definition of trace. The sum of diagonals
The second page, that is not the argument
We are saying that AA* must have nonnegative entries
So if the trace is 0, then the only way for a bunch of nonnegative numbers to sum to 0, is if they are all 0
And there is only one way for that to happen
I'm confused, how do you find just a basis for the subspace? Without knowing if it is the column space or null space?
why would you need to know the nature of the space in the first place?
you want a basis for the span of these four vectors
We need to take a step back and check your understanding of basis, span, and subspace
What is the definition of bases vectors?
Linearly independent set of vectors in a sub space that spans the subspace
@cedar solar
So i get the sense, the source of confusion is
Subspaces are defined by what vectors span them
So if i say, the subspace is the span of (0,1) and (1,0)
That is a 2d plane that extends in all directions
You are given four vectors, and the subspace is the span of those four vectors
Asking about the null space or column space is gibberish
You should review what those terms mean
does it satisfy the definition of echelon form?
well then
ok thanks
lol
So I'm still kind of confused about pivot positions... “Pivot position in every row" means that there are as many basic variables as number of pivot positions, correct?
@clear drift
No, for example, consider a matrix with two rows and three columns
1 0 3
0 1 5
Has a pivot in every row
You should post the solution too, for most would tell you to do effort first i guess
this is variation of parameters
this is my solution
here an example from the book since my writing and org skills are trash
I think you might have your first eigenvector wrong
the eigenvectors of that matrix are [1, 0] and [1,1]
the eigenvectors are [1,0] and [1,1]
The Linear Algebra book by Hoffman and Kunze just popped up at the store - should I grab it soon?
I just started the kahn academy linear algebra course last night. So far it's pretty good. Anyone finish it, if it's worth it or if there are better teachings elsewhere?
Why the heck would they use Cramer’s rule though for the above problem
MIT lectures on linear algebra are very good as well
Cool, I'll look that up. Thanks
@hasty rune if it’s cheap I guess. I’m pretty sure it’s free online tho
@slow scroll it's being sold at PKRS 1,000 - should be around $6
Yeah that’s a good deal. I
Haven’t used Hoffman and kunze very much though so idk if it’s any good.
lol cramers rule by hand
lol cramers rule at all
kek
it's already diagonal, why would you try to diagonalize it 
I mean