#linear-algebra
2 messages · Page 14 of 1
then ax+by = whatever
and so on
so it's easy to look at without requiring knowing that k
I don't know how to do that though lmaoo 😂
lmao
I'd recommend doing the adding and subtracting with the top two to get rid of z
try that
Hmmm, okay.
so you just have x and y, which is much more managable
So a cross product simplifies to ABsinθ
And a dot product simplifies to ABcosθ?
those are different representations of it, ABsinθ only gives magnitude, but the cross product actually gives a vector that is normal to the two input vectors
ABcosθ is a scalar, just like the dot product
The three-hand rule only applies to the Cross Product however right?
if we had three hands, that would be interesting, but let's call that but its conventional name...the right hand rule
you can find the direction of the vector produced by the cross product using the right hand rule...at least up to a certain point. If your vectors are at arbitrary orientations, it can get difficult
So I'm assuming you can't do that with dot products?
dot products are scalars, no directions to worry about there
Ok goodie
what does a non-negative matrix mean?
can't seem to find what it means on google
i mean the negative of a matrix just has all elements signs switched right
so i can't figure it out what this means
context?
says "non-negative diagonal matrix" on this slide
i'll check
gotcha yeah that might be it. i'll see if i can find an example
it would have to mean that all entries of Sigma are nonnegative (Sigma has nonzero entries only on its diagonal; some entries on the diagonal may be 0)
Heyy can someone help me with smth

I have a true or false exercice and im trying to verify
In R^4 there exists two vectorial spaces that intersect at 0
Its true right?
Cuz r4 is a vectorial space and it includes 0
?
you may send the thing in its original language
for any vector space V that isn't only zero, all of V, and {0} are two subspaces intersecting in 0
@unborn wedge
Il existe deux plan vectorielles F et G dans R4 tel que F inter G = 0
It is easy im in first year haha
En dimension finie, on a toujours existence de supplémentaires
@brittle juniper also "certaines applications linéaires R^2 ---> R^3 ne sont pas injectives est vrai aissi no?
Thought so
haha
hey I've had enough years of french to read french math :P
nice
I second guess myself a lot dont laugh at me xD
don't think that laighter was directed at you
I damn near need an instructor for my current assignment... Probably be about 30 minutes to an hour tops if someone is willing to help me. Going through some pretty mentally unstabling things in my life right now, but I also have homework and my major to focus on still. Any help is greatly appreciated, and if I had money to pay for your services I would, but that's college life for you.
I'm actively following off a PDF for my assignment, and I'm using google sheets as my digital paper as it is an online class. Both will be linked accordingly.
if I take sum of elements of a row/column multiplied by cofactor of some other row/column why is the result 0
a11C21 + a12C22 + a13C23 = 0
can anyone explain to me why?
@solemn lantern
Feel free to post any questions or pictures here
Here is the PDF for the assignment I'm working on;
https://tinyurl.com/MAT85-A3
Here is what I've done so far...
https://docs.google.com/spreadsheets/d/1Gj3H4Aw7z1KrTMUS_foBUtmuY14SqADFQ31iQanfG1A/edit?usp=sharing
Create a new spreadsheet and edit with others at the same time -- from your computer, phone or tablet. Get stuff done with or without an internet connection. Use Sheets to edit Excel files. Free from Google.
I just need to know if what I've done so far is correct, and then I'll continue on it for a bit until I have another question.
Can't seem to access the spreadsheet. Are you unsure about any of the questions?
Try this one maybe
https://docs.google.com/spreadsheets/d/1Gj3H4Aw7z1KrTMUS_foBUtmuY14SqADFQ31iQanfG1A/edit?usp=sharing
Create a new spreadsheet and edit with others at the same time -- from your computer, phone or tablet. Get stuff done with or without an internet connection. Use Sheets to edit Excel files. Free from Google.
Nvm got in
And I'm unsure of my formulas and general understanding if a formula is linear or not.
I feel like I'm correct, but I just like to know for certain.
Once I'm sure I have the first few parts correct, then I'll move on to the slope and y intercept part of the assignment, etc.
@solemn lantern
Acme obeys 31500(1.05)ⁿ¯¹
Oceanic obeys 33000 + 1500(n - 1)
Oceanic is linear, acme is not
Test?
Odd
My comment was immediately deleted lol
So I do have that correct alteast. It kinda made sense anyways just due to the fact that it's going up by a percentage, which is going to become steeper and steeper of a climb in salary as the salary increases. Whereas for Oceanic, it's a constant rate of 1500 per year.
I'd assume making something of similarity to the shape of a J over time.
ƒ(x)=m(1.05)^n-1 and ƒ(x)=m(1)+1500(n-1) then?
m representing the base or new base amount
Wait, why would it be n-1? If n is a representation of years, Wouldn't it simply be, for instance, ƒ(x)=31,500.00(1.05)^1 (for 1 year), which would equal etc?
,calc 31500(1.05)^1
Result:
33075
@solemn lantern
As you can see, that gives you year 2
Not based on the amounts I have. That correlates with the first year for Acme Corp for me. The second year I calculated 33,075*1.05 = 34,728.75
Because year 0 is when he starts, then using ^1 calculates for year 1, etc
Oh I see, my mistake
Does anyone know how I can answer this question?
Yeah, then what you have should work
No worries haha
@modest jasper
What methods can you use? Can you compute a matrix determinant?
We can use any method we want.
In terms of what I know how to do, I don't know how to compute the determinant, but I can compute the row echelon form @half ice
Okay, then do the row echelon form. You should be able to reach the identity on the left, but keep track of if you ever divide by (k - a)
If you are forced to divide by zero, you can't get rref
What's rref?
Row reduced echelon form
Oh, okay.
But how can I do that if k is on the diagonal?
I can't change k to 1, can I?
You can! You'll have to divide by k
It won't be just k though. Start at the left, work towards the right
I have a linear transformation that is a reflection on plane x+2y+3z = 0
And I should determine the matrix of the transformation with respect to base v1=[1, 1, -1], v2 = [-1, 2, -1], v3 = [1, 2, 3]
The matrix of this transformation is
[1 0 0]
[0 1 0]
[0 0 -1]
correct?
Since v1 and v2 lay on the plane so they will not move, and v3 is perpendicular to the plane so the coordinates will become negative
now I have a problem determining the matrix with respect to the standard base
how do I do it xD
the matrix you wrote is for a reflection over the xy plane, not the plane x+2y+3z = 0
oh wait i see what you mean
with base v1 v2 v3
I guess, v1 and v2 stay the same since they are already on the plane
yeah
Does anyone know how I can do this question?
youre looking for a vector X, such as AX=0
How do I find that
you could just solve the system
take the vector X=(a,b,c,d) vertically
and find a b c and d such as AX=0
Or you could just try to check what answer is correct
by just multiplying the vectors by A and see if it gives you 0
lil eigenvalues
for any projection
a projection is actually defined by that property
that P^2 = P
so the elements in the image are fixed by P
and yeah you may find the direction of projection by the kernel of P
but in general this is more than 1 dimensional;
projection from R^3 onto a line for example has a 2 dimensional kernel
so it isn't as nice
Does a matrix A have the same eigenvalues as A transpose?
yea because the determinant of A - \lambda I is equal to the determinant of its transpose.
that works because the identity is symmetric
Awesome, thank you
np
@wanton glade yes
I'm not sure how to go about answering this...
could someone point me in the right direction
I am taking this course https://www.udemy.com/share/100dKwAkQZcVxaQw==/

Udemy
Learn concepts in linear algebra and matrix analysis, and implement them in MATLAB and Python.
@olive breach that B = (X^TX)^-1X^Ty on the cover there is a called the least squares solution
of a matrix
I program multiaxis cnc machines and I want to understand this http://linuxcnc.org/docs/devel/html/motion/5-axis-kinematics.html
can someone explain this property of the dot product? $(k\vec{a}) \cdot \vec{b} = k(\vec{a} \cdot \vec{b})$
Randomdude:
if you do @ me with the explanation
it should be pretty obvious from either of the standard definitions of the dot product @kind arrow
if you have a dot b = |a||b| cos(theta), then (ka) dot b = |ka| |b| cos(theta) = |k| |a| |b| cos(theta)
oh
if k is positive, then cos(theta) doesn't change because a and ka are parallel
wow I am such an idiot thank you
yeah I just looked at it but I didn't make sense
but that explains it
if k is negative then theta becomes 180°-theta and cos(180°-theta) = -cos(theta), so since if k is negative |k| = -k, the negatives cancel out and you get k|a||b|cos(theta) in either case
ah ok thanks
np
what are people's opinions on Jim Hefferson's Linear Algebra (the free one) and Howard Anton and Chris Rorres, Elementary Linear Algebra 11th edition (2014)
Find the vector x that is transposed on the equation seen on picture: https://gyazo.com/34afdc133fc4f6a8863b03127f6d9f4c

How do i do?
Is it just ( X_1 = -1, X_2 = 2) ?
ye
If two matrices have the same eigenvalues, will they have the same eigenvectors?
I thought so, thank you
What does the notation W^⟂ mean?
it's the orthogonal of W
so what does that mean exactly confused by what the textbook is saying
x is in W^⟂ is saying x is an orthogonal vector to W or in W?
If you've got a vector space $E$ provided with a dot product $\brk{\cdot,\cdot}$, \
then $W^\bot=\brc{x\in E~|~\forall y\in W,~\brk{x, y}=0}$
Tuong:
ty still kind of lost
bascically set of vectors that are orthogonal to any vector of W
every
ye
but going back to the question i had earlier is x in W or x is in W^⟂ which is the set of all vector ⟂ to W?
x is in W^⟂ is saying x is an orthogonal vector to W or in W?
if $x\in W^\bot$, then $\forall y\in W,~x$ and $y$ are orthogonal
Tuong:
alright ty I'm sure I'll be back soon
👌
hello everyone
how do I prove that if A and B are similar matricies, then they have the same eigen value?
this isn't my homework or exam, I promise
if A and B are similar, then exists an inversible matrix P such that A=P¯¹BP
take an eigenvalue λ of A
there exists a non null vector X such that AX=λX
so P¯¹BPX=λX
so BPX=λPX
P is inversible and X≠0 so PX≠0
so PX is an eigenvector for B with eigenvalue λ
In the same way you can show that if μ is an eigenvalue of B, then it's also an eigenvalue of A
You're welcome
If a matrix has the eigenvalue 0 is it diagonalizable?
Ok good lol
Umm what about 1 0 first row, second 00?
that's diagonal(izable)
but the question was is it necessarily diagonalizable, and the answer is no, not necessarily
buncho gave a counterexample

Does it matter what two points i take to get the normal vector? For example (p_1 - p_2) x (p_1 - p_3)
I got the normal vector to (2,-3,2) but the answer contains the normal vector (-2, 3, -2)
yes
Oki awesome! ty
what that means is if you have a normal vector, then e.g. twice that (or in your case -1 times that) will also be one
because the normal vector is just some vector that lies in the normal line to the plane
as in, the line that is perpendicular to the plane
and doubling a vector on a line (nb: “line” in linalg means it goes through the origin!) just makes it twice as long, but still on the same line
Hey, I have a couple quick questions, not in linalg rn but just learning about it on my own time.
Conceptually, why are affine spaces closed under subtraction?
I’ve heard it said that some basis B of V is always a linearly independent subset of a spanning set S over V. This seems wrong to me. My naive thought process is that there a) may be no linearly independent set of vectors defined by linear combinations of elements of S and thus obtainable by reduction of S, and b) that a basis defined by linear combinations of elements of S is not necessarily a direct subset of S. Meaning A+B, with A and B being members of S, might be an element of the basis, but my understanding is that it’s not part of a subset of {A,B}
before I say something really stupid, is an affine space just a different word for a vector space or is it something entirely different?
Different
yea I just looked it up
I'm learning about LU decomposition. For normal cases, all is good. What I don't understand is the degenerate cases like this : $ \begin{bmatrix}
1& 2 &3 \
0& 0 &1 \
0& 1 & 0
\end{bmatrix} $
topbottom:
LU is a lie, it’s actually LPU where P is a permutation matrix
you have to exchange two rows here, which is what the P does
Yeah but what is the exact algorithm? Suppose that we go from A and transform it to this matrix (let's call it U), and record the row operations in L, so we have A=LU (with U not in upper triangular form yet). now we need to swap 2 rows, right? Then we have PA= PLU. Now we need to somehow move that P to the right so we have L'(PU). But what happens to L'? How do we get from L to L'?
The textbook states this theorem: for any matrix A, we can decompose the matrix PA to LU, with P is the permutation matrix. But that requires we know the proper permutation a priori, which we do not. If we try and fail (like above), we have to start over again?
don't want to interrupt is it ok if i ask a quick question that is a one word answer?
if a matrix is Orthonormal is it invertible?
lol
ty
A matrix is orthonormal iff $ QQ^{T}=I $ so it is invertible and the transpose is its inverse.
topbottom:
that's called orthogonal
yes, but it shouldn’t be
it’s inconsistent naming
imo, orthogonal matrices should be ones where $Q^TQ = \Lambda$, with $\Lambda$ diagonal and invertible
Sascha Baer:
btw, imo, $Q^TQ$ is better notation than $QQ^T$. You may think it’s a technicality. however, in the QR-decomposition, if you decompose a nonsquare matrix, $Q$ may only have orthogonal columns, not rows
Sascha Baer:
specifically, this happens
and if you use Q̃, then the rows are not orthogonal
depending on which algorithm you use, you may either get the first or the second decomposition
(gram-schmidt gives you the second, householder the first, for example. they’re equivalent)
I'm a bit confused on this. how is v_1*i a member of R?
What does "R" mean in this context?
then don’t speak
jeez don't have to be rude about it
basically, all you do is take $\mathbb{R}^2$ and identify the second coordinate with the imaginary part
Sascha Baer:
so like… $$\begin{pmatrix} x \ y \end{pmatrix} \equiv x + iy$$
Sascha Baer:
the $x,y$ parts are real numbers
Sascha Baer:
what are the <,>?
that usually means inner product, but that wouldn’t make sense here
oh sry i just meant the x,y vector you wrote
sry about that i wazs trying to represent a vector. not sure if i did it right
the vector (x,y) is an element of R²
x+iy is an element of ℂ
you show that essentially, the two are the same thing
by showing that if you add two vectors in R² and then go to C, or if you first go to C and then add them, you get the same result
interesting. i'll have to think about this.
it’s called an isomorphism
note that usually when we talk about ℂ, we mean ℝ² with the additional structure of multiplication
i guess i'm just having trouble with what a vector space is. so C is the vector space that (x,y) lives in?
no. you have two spaces here
in the space ℝ², we have vectors of the form (x,y)
in the space ℂ, we have vectors of the form x+iy
what you show in this exercise is that the two are essentially the same if you consider them vector spaces over the field ℝ (this means that the operation “scalar multiplication” takes real numbers as its scalars)
a vector space is three things:
•a set of elements
•a rule to add elements
•a field of “scalars” together with a rule for scalar multiplication of a scalar with a vector
a field being… a number system essentially
one in which you can add, subtract, multiply and divide
like the real numbers, or the rational numbers, but not the integers (because you can’t divide)
now, let me just describe how all these things look in ℝ²
gotcha that clarifies it in my mind a lot
the elements take the form $\begin{pmatrix} x \ y \end{pmatrix}$, where x and y are real numbers
Sascha Baer:
the addition rule looks like this: $\begin{pmatrix} a \ b \end{pmatrix} + \begin{pmatrix} c \ d \end{pmatrix} := \begin{pmatrix} a+c \ b+d \end{pmatrix}$
Sascha Baer:
the scalars are real numbers, and if $\lambda$ is some scalar, then the scalar multiplication rule looks like this:
$\lambda \begin{pmatrix} a \ b \end{pmatrix} := \begin{pmatrix} \lambda a \ \lambda b \end{pmatrix}$
Sascha Baer:
I hope all of this looks familiar enough
yep
now, how does this all look in ℂ?
Well, now the vectors have the form x + iy, where x and y are real numbers.
addition looks like this: (a + ib) + (c + id) = (a+c) + i(b+d)
and we can again choose the scalars to be real numbers, and then λ(a+ib) = (λa) + i(λb)
now if you compare this to the above, you can see that it’s essentially the same thing, except that instead of writing it in a column, we write it as a sum, with an “i” in front of the second element
so ℂ can be seen as a two-dimensional real vector space
the confusion arises (possibly) because ℂ is also itself a field, and you can therefore see it also as a one-dimensional complex vector space. and those are not the same thing anymore
hmm yeah now that i see what it means it's pretty pretty straightforward
(also I said a bit of a half-truth above: the vector space isn’t just any thing that has those three things, they also have to satify some axioms)
think i got tripped by the wording vector space "over" R. couldn't figure out what "over" meant. now that you've explained it i think i get it.
(which basically tell you that addition and multiplication work exactly how they should)
yeah i see what you're saying. it's a bit abstract, but it makes sense.
also, imo the whole “vector space over a field” thing really only makes sense once you’ve seen some other interesting examples of fields
so uh… have you met $\mathbb{F}_2$ yet
Sascha Baer:
no what 's F_2
it’s the field with two elements. so, you have two numbers, 0 and 1 only
and the following rules:
0 + 0 = 0
0 + 1 = 1 + 0 = 1
1 + 1 = 0
for addition
0 · 0 = 0 · 1 = 1 · 0 = 0
1 · 1 = 1
for multiplication
if you stare at this hard enough, you may recognize the rules of odd and even numbers: odd + odd = even (1+1=0) and so on
hmmm
I wrote the numbers in bold to remind you that they’re not the real numbers 0 and 1
what are they?
they’re just the things above
some representation of T and F
oh
ongoing discussion already, go somewhere else please, thanks
now, since this is a field, you can have vector spaces over 𝔽₂
yeah there's a chill section guy. i'm trying to learn here
so for example, $\mathbb{F}_2^2$ would be vectors of the form $\begin{pmatrix} x \ y \end{pmatrix}$, where x and y are elements of $\mathbb{F}_2$
Sascha Baer:
basically the same thing as ℝ², but with elements from a different field
there are only four elements in 𝔽₂², namely:
Sascha Baer:
and you can think about what adding those would look like
hmmm so is this like a seperate kind of number system? 1 and 0 are not real numbers?
exactly
a field is just any number system where you can add, multiply, subtract and, notably, also divide through anything except for 0; and the operations satisfy what you might call the rules of arithmetic
things like commutativity and distribution laws
i've got a question about vector spaces which are kind of like these fields.
the set of rational numbers is not a vector space over R because if x,y and k are members of R then not every combination x+y*k is a rational number?
like in the previous example with complex numbers every x+yi represented a complex number but here not all of them represent a real number?
does that make any sense?
as a vector
and the real number π as a scalar
then π*1 would have to be a vector, ie rational
but it clearly is not
…actually use √2, just in case the person who corrects it gets all annoying and asks you to prove that pi is irrational
:P
haha yeah i'm not sure how i would even do that
uh I think it’s doable but not easy
thankfully no one will be correcting it. believe it or not, i just finished a linear algebra college class, but i think i have to start over from the beginning because clearly i did not absorb all the information lol
tbf, if it wasn’t a theoretical class this stuff was probably rushed
yeah the class description said it would focus on applications of lin alg. idk it took me forever to learn calculus also so it might just be i'm not really a "math person". i'm kinda a slow learner. i do like math a lot though.
in the culture part of my course i have this proposition: let A be a ring
M in Mn(A) is invertible <=> det(M) is invertible in A
is that true?
because det is a morphism of Mn(A),× to A,× such as det(Id)=1 right? So if M is invertible then the det is too
i know that's true in a field
the question was: Is it also in a ring?
if it is it's a beautiful result
B u t, it would certainly make sense given how matrices work, I'd have to actually look at it
I vaguely recall this to be true. iirc you can prove it with cramer's rule
^ yeah, it should be true, but i can't be bothered to actually prove it
3b1b has a video on it
it's a kinda ugly but occasionally useful rule for determining inverses
It's rather ugly i must say
yea. never use it in a calculation, only in proofs
if you use it in calculation, kindly uncalculate please
in my course its said that if f is a function of A into B such as f(ab)=f(a)f(b) and f(1)=1 then f(A*) is included in B*
so it should be true i think
so i just need to show that if det(M) is in A* then M is invertible in Mn(A)
hey
if I try to reduce a matrix to RREF and an entire row ends up being zeros
do I just take that row out and make the entire matrix one row shorter?
please
i'm not sure what you mean by taking the row out?
what are you trying to do exactly
@dire hound
did i prove that the set is not a vector space correctly?
actually let me rephrase my question
what happens when one row of a matrix is a scalar multiple of another?
well it means that you have free variables in your solution set for one
i'm pretty sure
are you trying to solve a system of equations?
yes
ok so do you know what a pivot column is?
feel like it's late for me to be asking this but does anyone know a good way or video to visualize row , col and nul of a matrix
if type "3blue1brown null space" into youtube he has a great visual explanation of it
ik it's just a shame he doesn't have one on orthogonality cause then I'm lost
I'm trying to find something showing rowa perp = Nul a
yeah beyond 3b1b videos i'm not sure. i'm retaking lin alg from the beginning because i'm lost as well
have a final tomorrow and every hour I study i feel like ik less lol
why can there be multiple bases for a vector space?
thx
But all basis will have the same number of elements
Ergo vector spaces have a dimension
There's infinitely many
my books says the answer is that it's not a vector space but for a different reason.
just trying to see mine is correct as well.
works as well
ok thank you 👍🏼
hey guys if a matrix is 5x5... would this be NO for diagonizable?
68.64208 + 0.00000i -3.64208 + 0.00000i -0.00000 + 0.00000i -0.00000 - 0.00000i -0.00000 + 0.00000i
these are the eigen values
dont think it would be cause doesnt have 5 distinct values but I'm not the person to answer lol
that what i was thinking too tbh lol
You can't tell, it could be or it could not be diagonalizable
The identity matrix doesn't have two distinct eigenvalues, but is diagonalizable

Review the definitions of algebraic multiplicity and geometric multiplicity
woopy:
yea
Does anyone know how I could solve this?
what it's asking for is two non-trivial solutions to the matrix
@modest jasper
so for the matrix A, find x1 and x2 for which Ax1 = 0 and Ax2 = 0
What does it mean for the matrix to be equal to something?
that’s not what it’s asking
for a matrix to equal something just means they’re the exact same matrix. but it’s asking you to find a product of matrices here which will result in 0
you have an equation of matrices and have to solve for x, where x is a matrix :P
and it’s specifically asking for a nonzero matrix, so your answer is wrong because of that

no, this is correct
that matches what you have
oh oki 👌
I think i figure it out! Gonna try
yep got it
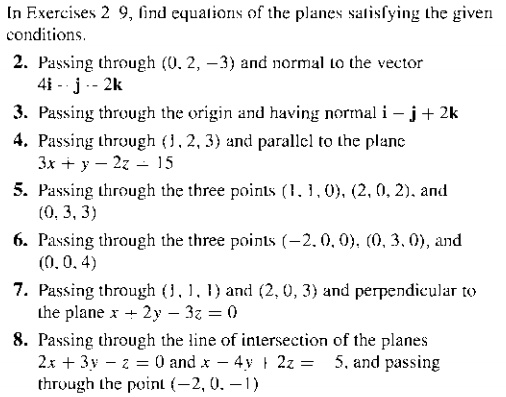
I am in need to find the equation of a plane passing through the line of intersection between two planes and a point
What is the strategy to finding the normal vector for this type of example?
im on exercise 8
So remember that the coefficients of a plane are the direction vector (if I remember correctly?)
lemme get my notebook
yeah its in general form
so whats the normal vector of the plane of 8?
@frank gate
is it the (plane 1 vector - plane 2 vector) ?
cross product i meant
(2, 3, -1) x (1,-4,2)
Well you could find any point in that plane
suppose x and y = 0
solve for z and you get point a
How do i solve for z in that case? I am awful at this

x=y=0
then -z=0
z=0
for that piont
and the other plane x-4y+2z=5
x=y=0
2z=5
oki 😮
2z=5

let me check something
oh wait
,w cross (2,3,-1) and (1,-4,2)
well well well 
point is 0,0,0 right
and 0,0,5/2
point in reference was -2,0,-1
ab = (-2,0,-1)
ac= (-2,0,-7/5)
,w cross (-2,0,-1) and (-2,0,-(7/5))
I think you are suppose to combine the planes and introduce a variable F for example and then that equation should correspond to the point of refrence you had
check this e.x: https://gyazo.com/b2df64af6d92a077ba859fb68feead82

same question, different values
just think of it as variable F instead
ay fren @half ice or @wooden plover you bois know bout this?
<@&286206848099549185>
you combine the two planes, insert x, y, z of the point on all the positions and solve for introduced variable F
Yea, theres a couple m8s who know this just wait for someone to roll aroudn and check on it, ping me when u got a method
Wat? Are we all good now?
i think so : )

im on exercise 9. Can someone explain what to do?
this is the solution sheet but i dont get it

{kind=link}
where the heck does x = -1 + 2t come from for example?
Lel essex. I had his class in PDE, interesting guy
? 😮
I don't understand the solution either. That's an equation for a line, no?
Ye read the top of this https://gyazo.com/f617fb3eb242165cdc0fb82fee47c9c1
and im on 9
@broken hawk Do you know how I might be able to solve the question then?
why are you pinging me
You responded to me...
sorry, I didn’t recognize you
yes, I do know how to solve it, but the person with the green name already told you what to do
and I don’t believe spelling solutions out explicitly is helpful
you should review your material on how to solve an equation like Ax = 0 (where A is a matrix and x, 0 are vectors)
and then, as was said there, your target matrix will just have (any) two solutions for that equation in it
I thought you said that's not what it's asking.
there’s infinitely many of them
then you misunderstood what I said
read it carefully
Okay.
it’s telling you that the solution itself may not be 0. not the righthand-side, but the thing you’re solving for
Alright, thanks.
im trying to find a generalization for multiplication to the power of n for a 2x2 matrix, this is doable right?
i dont want to waste hours
im using eigenbases
if you have an orthonormal basis of eigenvectors then taking A^n just means (a_{ii})^n
since it’s diagonalized
if you’re in the eigenbasis then it’s just taking the power of the diagonal entries
I don't understand how S = {1} is a vector space. I thought vector spaces must have a zero vector?
it looks like addition is defined differently on this set. 1 acts as the zero vector
ah good point
let $v \in S$. Vector addition on this set says that $v+1 = v$, so $1$ is the additive identity. Similar thing for scalar multiplication
kxrider:
interesting. so it becomes a trivial space under these operations i guess
Cosack:
Or do I just treat them as variables
looks like they're intended to be constants; one for the x direction and one for the z directoin
weird that they capitalized them though
@feral crow
How do I find a vector that diagonalizes H?
I know A = PDP^(-1)
Is that asking for D?
Or P?
you know what D is already once you find the eigenvectors/values of H
writing H in the basis of eigenvectors diagonalizes it; the diagonal entries are the eigenvalues
it's asking for P
So P is just the eigenvectors?
In matrix form
and D has the cooresponding eigenvalues in the diagonal terms
do you know braket notation? it makes it a bit more clear imo
$P = [v_1 v_2]$
$\bra$
kxrider:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
Cosack:
$\mel{i}{H}{j} = \sum_{n,m} \braket{i}{v_n}\mel{v_n}{H}{v_m}\braket{v_m}{j}$ where $i$ and $j$ range over the original $x/y/z$ basis and the $v$s are the eigenvectors. since they form a complete set, the sum over the projection operators $\sum_n \outerproduct{v_n}{v_n} = 1$ and you can insert the sum over eigenvectors wherever you like
but basically yes, you write the eigenvectors as a matrix in the original xyz basis to get your rotation matrix
if this doesnt make sense to you, you can just ignore it (im a physics person so seeing the dirac notation is more illuminating for me, but it might not be the case for you)
So when I use this calculator
D mages sense because it's just diagonal eigenvectors
But wtf is going on in the denominator
Do they normalize or something
you can multiply v1 and v2 by x without changing their eigenvector status
it will probably make the math a little prettier
Well the first column of P is clearly v_1
since x is a constant, $\hat{H}v_1 = \lambda_1 v_1$, you know $\hat{H}(x v_1) = x\hat{H}v_1 = x\lambda_1 v_1 = \lambda_1(x v_1)$
I just dont know why they have the denom
ohh i see
Maybe just how the calculator works
Since they all have the same term I can just ignore it i suppose
That denominator is definitely out of the scope of my class
you can write it in wolfram and see if it simplifies
no prob!
yes
think about the column by coordinate definition of matrix multiplication with vectors.
if you have a matrix with columns, $v_1, v_2, v_3, $ then $$[v_1 \quad v_2 \quad v_3] \begin{bmatrix} a \ b \ c \end{bmatrix} = av_1 + bv_2 + cv_3$$. This is completely equivalent to the other definition where you multiply the entries of each row with each corresponding column and add them together. @modest jasper
kxrider:
@slow scroll Oh, yes, I figured that out.
I just want to know how I can determine what that matrix actually is.
Wait, I figured it out.
The answer was actually pretty simple.
Thanks again!!!
nice. no problem
it's not actually as bad as it looks if you remember the multivariable chain rule; you have $x$ as a function of $r$, $\theta$, and $\phi$, so you can expand like $$\dd{x} = \pdv{x}{r}\dd{r} + \pdv{x}{\theta}\dd{\theta} + \pdv{x}{\phi} \dd{\phi}$$
and similarly for dy and dz
Is the determinant of a rotation matrix always 1?
Since that means it preserves the dimensions
er volume
i guess
And thanks stellar!
in fact rotation matrices satisfy a stronger condition
they're orthogonal
meaning $A^TA = AA^T = I$
Ann:
Thanks!
Cosack:
I get a SUPER messy set of equations when I square dx, dy, dz
Does anyone know how I can solve a question like this?
My best guess is C and D aren't linear because they move as a function of x in two different dimensions
So maybe that makes them not linear
But I don't know for sure
What does it mean for a transformation to be linear?
There are two rules it needs to follow
Being honest I'm not exactly sure.
I did a lot of reading but it's still a bit hazy to me.
I know about x+y/3x.
Definition of linear to most people :
T(av + bw) = aTv + bTw
For a and b in K
For v and w are vectors
that is the definition of linearity yes
I'm still not sure how that helps, I'm sorry....
Well added a disclaimer in case there are other notions
you can separate it out into T(v+w) = Tv + Tw and T(cv) = cTv
I'm still not really sure how it helps, sorry.....
@modest jasper try substituting the vectors (x y z) with (x y z) + (x' y' z')
Just dummy you use to test
I'm still not sure how that helps, sorry...
I don't get why that makes a difference, I mean.
First try acting T on original vectors + dummy vectors then see if it equals T acting on original vector plus T acting on dummy vector separately
First property of linearity is just see if T(v + w) is it equal to Tv + Tw?
You mean T as in x+y/3x?
Where v = (x y z) and w= (x' y' z')
What does that have to do with the other side of the equations?
How does it factor in?
T is like some operation you do to vector v = (x y z) to produce things on the right
So T is not really numbers or anything (though it can be represented with matrix)
So it's not x+y/3x?
@modest jasper where do you get that x+y/3x from?
Khan Academy tbh.....
"it can be represented with a matrix" only if it's linear!
@broken hawk yeah  almost forgot that
almost forgot that
@modest jasper forget trying to factor T or making sense what number T is. T is just operation you do
To vector (x y z) and (x y)
So for something like the first question, would T be something like:
0 0
0 4
?
Seems correct
Okay, I'll be back in a second...
“forget trying to make sense what number T is.”
“so T would be (numbers)”
“seems good”
I hope you see the irony in this exchange
@broken hawk no comment
@modest jasper but you can NOT represent NON linear transformation with matrix. So the easiest check is, for example the first one is
try acting T ((x y)+(x' y')) = T(x+x' y+y') = (0 4(y+y'))
The outside parenthesis is the parenthesis for vector
this would be less confusing with latex
what makes linear algebra difficult im thinking of trying to self study it
Self-study?
it’s not really difficult at all, tbh, but it tends to be somewhat of a spike in rigor
@broken hawk yeah typing latex in phone is hard
if you’ve never done any proof-based math that’ll be the challenge, mostly
oh i c
@hoary nimbus I'm really sorry but what you said confused me a lot...
how to get better at proof based math
do proof based math
true
Haha sorry maybe @broken hawk can explain better
the issue with proofs however is that it’s easy to fool yourself into thinking you got sth right
yeah
if you don’t like spam it
sure
anyway, lemme see if I can explain this
lemme show you two examples in one dimension to illustrate how to check this
Example 1: $T(x) = 3x$
Sascha Baer:
now you need to check if $T(x + y) = T(x) + T(y)$ and $T(\lambda x) = \lambda T(x)$
Sascha Baer:
where x,y are vectors (which in 1D are just numbers) and lambda is a number
so let’s start at the beginning
are they the same?
Yes?
Sascha Baer:
What about it?
does it hold?
Yes.
I don't know. Didn't you just tell me that was the rule above?
no?
you need to read more carefully
I said we have to check two properties
the first we’ve checked
T(x+y) = T(x) + T(y)
but we’ve not yet checked if T(λx) = λT(x)
for a function to be linear, both of these must be true
and one does not necessarily imply the other
Uh...
||if your base field is Z_p for p prime, it does||
all you have to do is plug in the definition of T(x)
that’s all you have to do
just apply the function to whatever it is applied to
Is it that because T(x)=3x+3y, if you take out three and have 3T(x)=x+y, that will be equal to T(x)=3x+3y?
I'm sorry, I'm really confused...
please work more carefully
I don't know how to determine this lambda stuff.
you just need to take it slow. I gave you a definition and all you have to do is apply it
what is T(x)?
3x?
what is λT(x)? (lambda is just a number)
now, what is T(λx)?
The same thing?
i feel like linalg isn't the best place to start out for a student who isn't familiar with proofs
worked for me
@dusky epoch what's your recommendation?
Sascha Baer:
i would recommend giving How To Prove It by Velleman a read.
Saten, can you try to calculate T(x+y) and T(x) + T(y)?
T(x+y) I guess would be x^2+2xy+y^2, and T(x)+T(y) would be x^2+y^2?
yes, that’s correct
and it’s pretty easy to see that those two are not always the same
Yes.
But how would you do it if T(x) was a vector instead of a scalar?
you do the same procedure, but instead of x and y you use two vectors
and the function will be applied to each component of the vector inside
well no
it’s hard to word
I'm a bit confused. Could you give an example? I pretty much only understand examples tbh.
ann, can you take over? I have to start working on my own stuff
sure, gimme a min
i'm gonna get some paper
so here's an example of a transformation whose inputs are vectors, in this case from R^2
@modest jasper do you want to try it for yourself? check whether this transformation is linear, and if it is, write a proof of its linearity
What I need to know is what to do if the output is a vector.
there really is nothing special about that
you know how to add and scale vectors, do you not?
Yes.
I was wondering because all the examples I got before had T(x) equal to a single value.
this is not multi-valued either
there is only one output; it just happens to be a vector
well
a vector from a space that isn't R
@dusky epoch I think she might get it with R^2 - > R^2
That example seems to be okay, but I don't know how to check if it is linear...
just work through the steps, one by one
- calculate T(v+w) and T(v)+T(w), where v and w are now vectors. If they’re not always the same, then it’s not linear
- Calculate T(λv) and λ*T(v), where λ is a scalar. If they’re not always the same, then it’s not linear
if they’re always teh same, then it’s linear
that’s all you have to do
now just do it
step by step
don't overthink it
Can T be a vector instead of a single scalar value?
T is abbreviations of transformation
How do I know what the value of the function T is then?
you will be given it.
In my question I wasn't given T though...
@modest jasper you were given the value of T
Is that vector value the function you were talking about?
ok wait
what is your original question?
What do I do if T is a vector instead of a single scalar value?
you mean if T is vector-valued? i.e. its outputs are vectors?
In @broken hawk 's examples he only gave one value as the value of T.
That's not what's in the question.
So I'm still confused about how to answer my questions...
sorry but i really don't understand your confusion
checking a transformation for linearity is EXACTLY THE SAME whether its outputs are numbers or vectors
maybe should start with definition of function as certain subset of Cartesian product of X \times Y just to remove prejudice what are function 
yes, I gave examples with one value to show the procedure
because the procedure is the exact same
you just… have to actually do it
you’re way overthinking it
just start writing
$T\left(\begin{pmatrix}x_1 \ x_2 \end{pmatrix} + \begin{pmatrix}y_1 \ y_2 \end{pmatrix}\right) = \dots$
Sascha Baer:
simplify the expression inside first, then apply the function based on the instructions given
I'm sorry, but I'm just not sure how to do this with both an x and a y and a vector @broken hawk .
I just don't really know how to determine what T is and how to plug in the values into the function.
calculate T for 500 values until you understand exactly how to do that, then replace the values with variables
what T is is given to you
Where?
e.g. in Ann’s example
and in literally every other exercise
it always says exactly what T does
you just have to apply it
It just says what you get what you have T(x y).
But I don't know what to do when I have two variables.
I said “simplify the expression inside first”
I don't know how to do that...
Yes.
then do it
Okay.


I just think it's kind of unreasonable for you to expect me to figure out on my own how to complete these questions when your only example was something that was far simpler than what I have to do now.
I mean I also shouldn’t be helping anyway, I have a measure theory chapter to get through
@modest jasper how about reviewing the material? Or just ask your teacher/professor?
You know you guys in America got things called office hour right?
I'm Canadian but okay.
 do it with your friends
do it with your friends
I don't have any friends.
Make one or two soon
r/wowthanksimcured
Thanks.
What have you tried?
What does it mean for these to be linearly independent?
their superposition, when = 0, only is valid for when all constants are 0
Right and you have to remember this is a superposition of functions. So the thing on the right, the = 0 is really the 0 function.
yes
So it's true for all t
That the superposition of the functions = 0 for all t
if they are linearly independent, yes
i have to prove they are
setting them equal to 0 doesnt do anything since its all e
and trying to do ln(e) doesnt work since ln(0) is undefined
though rn im trying to see what happens if i divide all by e^t
You want to show that all your constants are 0. Plugging in t = 0 will give you a system of equations so that you can solve for these constants
plugging in t = 0 will just net me the matrices given
the [1 1 0] etc
im not sure if "verify" means it can be dependent or independent
because so far everything ive done has shown dependence
Remember what superposition actually is. You're taking a linear combination of these three vectors. So you have three constants
These constants are what you need to show are 0
got it
thank you
is this correct?
looked it up more
if i get a 0=0 situation, it's infinitely many solutions
and if thats the case, it's not linearly independent
so
honestly i've tried multiple things
more than once i've gotten linearly dependent
tbh isn't it kinda obvious these are LI
yes
but the wording of the question implies they should be independent
but
i dont know
i feel like the fact that theres that e^t bullshit going on, its affecting it in some way that makes it independent
yes it does
the only way to make u e^2t + v e^4t ≡ 0, where u and v are vectors, is to make u = v = 0
dunno where you got 4t from
but
i cant just say that, can i?
i dont want to lose points by just explaining
How do I get from the first to the second step? Where does (2, 3, 4) come from?
I'm not quite sure, it says to solve the equation system (first step)
And the second step is to be the solution
So I guess A is a matrix?
@dusky epoch
i mean yes A is a matrix
i was asking you for its value
can you post the whole problem
wait, you wouldnt need A to find the vector (x y z)^T
what it's saying is for some unknown matrix A, Ax = (1 0 1)
The problem is just: Solve the following equation system
and for the inverse A^-1*(1 0 1), you would get x
@wintry dirge does the problem not say "A = ( ... ... ... )" elsewhere
wait, is the question asking you to find x y z from the the values given?
is there any more information in the question
The problem before on the sheet is to Invert A and to prove it
I was shown this method for finding the determinant of a 3x3 matrix (denoted by "A" in this first screenshot). It is expressed as the sum of 3 ,2x2 determinants which have each been multiplied by a scalar. http://prntscr.com/npg0y0 . I am then shown this general way of calculating the determinant of a N x N matrix. http://prntscr.com/npgcdy If I have a 4x4 matrix, i am to calculate the value of 4, 3x3 "minor" determinants. To calculate the value of each of these 3x3 determinants in order to calculate the value of the 4x4 determinant, am I to follow the same method in the first screenshot but repeat the method 4 times?


The minor determinant for a cofactor within A is generated by eliminating every element in the same row and column as that cofactor
If I have a 4x4 matrix, i am to calculate the value of 4, 3x3 "minor" determinants. To calculate the value of each of these 3x3 determinants in order to calculate the value of the 4x4 determinant, am I to follow the same method in the first screenshot but repeat the method 4 times?" Yes you can do that.
There's also rule of Sarrus on how to find determinant of a 3x3 matrix
Ok good
but what you sent is called Laplace expansion