#linear-algebra
2 messages · Page 8 of 1
the exercise starts in 30 minutes so I guess I'll get the solution by then 😃 but thank you very much anyway! awsm that you would do that for me
@surreal loom well i know im late but every permutation in Sn can be written as the composition of a finite number of transposition if that helps
What is Cramer’s rule?
it is an explicit formula for finding the sol of a consistent system
for a system Ax = b, with A an n by n matrix with nonzero determinant, the solution's coordinates x_i (i = 1, 2, ..., n) are given by the following formula
related to cofactor matrix stuff
$x_i = \frac{\det(B_i)}{\det(A)}$, where $B_i$ is the matrix formed by replacing the $i$'th column of $A$ with $b$.
Ann:
@solemn flax
Pretty hard to understand without an example though
bread girl
smh
Hey does anyone here have an example on how to express a matrix multiplication over a set of basis?
if A^2 is hermitian, then A is hermitian. true or false?
By contrapositive, if A is not hermitian, then A² isn't either. True or false?
uhhhh
Odds are no, I'm trying to think of a counter example lel
But maybe there's a reason I'm not seeing
we can always just take the 2x2 case and do it component-wise
and use properties of conjugates of complex numbers
Since (AB)' = B'A', (A²)' = (A')²
Assume:
(A²)' = A²
(A')² = A²
Since a square root of a matrix isn't unique, A is not hermitian
oof
It's hard to use that to conjure a counter example, lel. Taking square roots is hard
yeah...
ok so since im allowed to use Maple
it turns out that Maple has a way of finding square root of matrices
so yea ur right, the claim is false
@half ice
uhh more linear algebra pasta
this question i feel is trying to get out of us that the restriction on A for it to be diagonalizable is that a = -2 and b= 0 (making A hermitian)
in other words, that if (a,b) =/= (-2,0), then A is not hermitian, and therefore that it is not diagonalizable.. but is this correct reasoning?
Hellooo
alright so I have a question! I have 3 Coordinates in R2 that I need to transform into 3 other given Coordinates in the same Plane via affine transformation. How do I start with this one
I don't really know how to tell if two matrices are similar. Could someone guide me through the logic behind figuring it out?
well you could try to use the definition of similarity
which given the matrices are 2×2 isn't that bad
or you could try to compute their characteristic polynomials. if they aren't the same then the matices are not similar
I don't know what characteristic polynomials are. The best justification i've been able to come up with so far is that they are both rank 2 🤷
nope
yep
letting $A = \begin{bmatrix} 1 & 3 \ 2 & 2 \end{bmatrix}$ and $B = \begin{bmatrix} 0 & 2 \ 4 & 2 \end{bmatrix}$
Ann:
you want to see if there exists an invertible matrix $S$ such that $SAS^{-1} = B$, or equivalently $SA = BS$
Ann:
so i guess you can let $S = \begin{bmatrix} a & b \ c & d \end{bmatrix}$
Ann:
and write out the equation SA = BS
as a system of four equations in four variables
and see if it has a solution
oh alright that makes sense.
yes
and so you know that if two matrices are similar then their traces are the same
right?
i was also asked to prove that on the problem set. Wasn't too sure what to do lol
ah well that isn't too hard to prove
if you can prove what i think is called the cyclic property of the trace
namely, that tr(XY) = tr(YX) for any two square matrices X and Y
yea it gave that as a hint
because then you can make the following very simple argument
$\tr(SAS^{-1}) = \tr(S(AS^{-1})) = \tr((AS^{-1})S) = \tr(AS^{-1}S) = \tr(AI) = \tr(A)$
Ann:
omg of course. very nice.
so with that in mind
if two matrices have different traces then they are definitely not similar.
and your two matrices have traces 3 and 2 respectively
I've got the following question:
For n quadratic matrices $K_i, \ K(x)=\sum x_i K_i$ we consider the cone $K={x\in\mathbb{R}^n: K(x)\succeq 0}$. Is it possible to find $x \in K$ such that K(x) is a rotation matrix, if we add $K$ to be pointed and $int K\neq \emptyset$?
mathDE:
yes, $\succeq$ is supposed to mean positive semi definite
mathDE:
the matrixes are all nxn?
uh, bit confused about the notation here. sum over x_i K_i is a row vector, so it can't be a rotation matrix
oh I see
x_i aren't vectors but the components of x
no assumption on the positive definiteness of the K_i?
The Matrix size isnt fix since most cones have several representations with different dimensions
Also, how do you define rotation matrix?
identity, or a rotation of a 2D subspace and identity elsewhere?
tAA = I with det A = 1
that's an orthogonal matrix
For example the lorentz cone in 3 variables has representations with 2x2and 3x3 mateices.
to me rotation matix is more specific
tAA = I is an orthogonal matrix
right, special orthogonal
Orthogonal and keeping Scalar product
rotation matrix is the subgroup of these matrix with determinant 1
a special orthogonal matrix is the product of rotation matrices, but this is why I asked
cause not everyone uses this terminology the same way
Orthogonal and det 1 is fine es well
So do you have any ideas? Since int K isnt empty and K is a cone some continuity argument can be used to show that there are x in K such that det(K(x))=1. But to show that one of these is orthogonal seems more comlicated.
im trying to see if $x \mapsto K(x) K(x)^T$ defined on the cone passes through identity
oumid:
I guess understanding the manifold structure of SO(n) would be useful here eh
hi guys this isnt a question about an assignment, but could anyone please send me an example of what linear algebra looks like?
Linear algebra is the study of vector spaces, and linear transformations between them
Basically, take vectors, take functions that preserve the structure of those vectors, what can you say about them?
@quiet crane
i may need help with this subject in the future, i just want to get a head start
Yeah of course, feel free to ask
For the definition of subspace when they say closed under vector addition can someone please explain closed ?
that means any vector in the space added to any other vector in the space is a vector in the space.
does this include negative scalars?
like scalar multiplication? Yea, vector spaces also must be closed under scalar multiplication
ty makes sense just need it reworded
np c:
@slow scroll with the save spent too much time on this one question instantly got it once you said that
glad i could help! 
What’s the dif between this and normal algebra
Linear algebra is the study of vector spaces, and linear transformations between them
You will probably fairly soon learn what vectors are, lin alg is a lot of that.
Hey guys I have got A (1/4/-1) B (-2/1/-1) C (-3/-1/0) those dots are on a circle. I wanna find the center coordinates of the circle . anyone got an idea how?
Well I never did this
But the point should have the same distance between all points
Just that sry
Lol
or maybe I am wrong. The task says those coordinates I just gave you are positions of a planet who is orbiting a star. and I need to find the coordinates of the star
Wait can you send how it looks I’m geigebra
I’ve never done this but I wanna have fun
I wish I had this problem
What’s a matrix
Is there a formula for circles in graphs
What does that have to do with linear algebra?
No idea
Yes I checked later
@little cairn that column A gonna be a vector, yes?
I assume by Col (A) it meant Columnspace of A, so it's going to be a set of vectors. at least I assume
considering the previous problem
t in K?
Ann:
@little cairn https://www.khanacademy.org/math/linear-algebra/vectors-and-spaces/null-column-space/v/null-space-and-column-space-basis will this help?

Khan Academy
Figuring out the null space and a basis of a column space for a matrix
Thanks @glacial gulch I’ll check it out
@little cairn http://www.math.drexel.edu/~jwd25/LA_FALL_06/lectures/lecture5C.html Example 5
wizz:
should be your A unless I accidentally crossed my eyes while writing them down xD
how do I check whether a point is in H where H is affine combinations of some vectors?
@winter reef https://math.stackexchange.com/questions/985645/express-a-point-as-an-affine-combination-of-another-two-points3d-collinearity will this be of assistance?

Mathematics Stack Exchange
So, given the points A(1,2,2), B(2,4,2) and C(3,6,2) I have to show that they are collinear.
If they are collinear then I must express one point as an affine combination of the other two points.
I ...
ty will check it out
Thanks @glacial gulch that was a lot easier than I expected
I even left a proof at the end
np, sry it took forever to get down to googling :D
Hi guys, so I have to find the orthogonal projection of (-1,1,2,2)^T on the subspace spanned by:
v1 = (1,1,1,1)^T
v2 = (0,0,2,2)^T
Which would be easy if these two were orthogonal themselves, but they're not. Is there a smart way to do it without v1/v2 being orthogonal?
@steep marten Just use gram schmidt, works with any set
So the subspace is preserved through GS and then it becomes ez
can anyone simplify these into real numbers?
i got eigenvalues: 4i, -4i
eigenvectorss: <1/2-i/2,1> and its conjugate
you mean eigenvalues 4i and -4i
you're gonna get cos(4t) and sin(4t) eventually, i think
i got to c1/2*(cos4t-icos4t+isin4t+sin4t)
pls don't give answers 
idk how to go from there
mhm
so one of your complex sols is <1-i, 2> e^4it
take the real and imaginary part of that
shouldnt all the values end up real
the imaginary part of a complex number is a real number
$\Re(zw) = \Re(z)\Re(w) - \Im(z)\Im(w) \ \Im(zw) = \Re(z)\Im(w) + \Im(z)\Re(w)$
Ann:
ah ok i did some reading
thanks for the help
my class hasn't actually gone over this yet
okay guys I have a ship starting point (50,12) moving in the direction (5,12). It moves with 26 km/h. I need to find the coordinates of the ship after one and two hours.
<@&286206848099549185>
okay problem solved: I needed the unit vector
I'm not understanding this. Is this a linear transformation? If T(xi) = axi + b. For two inputs we have T(x1+x2) = a(x1+x2) + b = ax1 + b + ax2 =/= ax1 + b + ax2 + b = T(x1) + T(x2). Maybe i'm seeing it wrong and what they call a linear transformation here is not exactly what I think it is.
t!wiki affine transformation

In geometry, an affine transformation, affine map or an affinity (from the Latin, affinis, "connected with") is a function between affine spaces which preserves points, straight lines and planes. Also, sets of parallel lines remain parallel after an affine transformation. An ...
ye... but it says linear transformation :/ , not affine
can anyone explain what a "span" is exactly? I have having trouble wrapping together the concept with the idea of linear independence and basis, and dimension
the span of a family of vectors is the smallest (for the inclusion relation) vector space that contains that family of vectors
For example, if $v_1, v_2, v_3$ are vectors of $E$, it means span$(v_1,v_2,v_3)\subseteq E$
Tuong:
https://www.youtube.com/watch?v=fNk_zzaMoSs&list=PLZHQObOWTQDPD3MizzM2xVFitgF8hE_ab watch this playlist, first two videos are all you need right now but it’s great

Kicking off the linear algebra lessons, let's make sure we're all on the same page about how specifically to think about vectors in this context. Typo correc...
you can prove the span of a family of vectors is the set of linear combinations of said vectors
so just watch it all
Oh yeah those vids were nice
the first video is just a bit of setup, the second is where he explains span, basis and linear combinations
he puts it in a non-formal setting, so if you’re doing very formal linalg, treat this as examples
this is imo mandatory watching for anyone taking a first linalg course
and some of the videos are good to rewatch after you’ve worked with the material a bit imo, there are some things I found nice on a first watch but only really grokked after I had a much deeper understanding
like the video on duality
also honestly, span is weird to explain because once you understand it, the word is so obviously descriptive
@brittle juniper @broken hawk thanks a bunch, coming to an end of my lin alg course and they dropping all this stuff on us
wait what
must be tough
what did you do all year
even if the whole course is just matrix stuff, linear dependence is important there too
@broken hawk we did matrixes, and learned about hyperplanes and a bunch of intersection stuff
point normal
ah so it was more vector geometry?
yeah
rather than actual linalg
^ thats a nice icon, roxas
Any good source to learn affine stuff?
i'm confused about something
prove that $ cos \theta = \frac{x^T y}{(| x | _2 | y | _2)} $
Wed.:
using the law of cosines
$ || y - x ||_2 ^2 = || x ||_2 ^2 + || y ||_2 ^2 - 2 || x ||_2 || y ||_2 \cos{\theta} $
Wed.:
Wed.:
i don't get how $ 2 ||x||_2 ||y||_2 = 2 x^t y $
Wed.:
because $ ||x||_2 = \sqrt{x^t x} $
Wed.:
use $|$ instead of $||$
Sascha Baer:
\|
too much lines to replace ..
To prove a subset is a subspace, do you first have to prove that the subset is a vector space?
For vectors yes oof I'm wrong
@vague musk no, you have to prove that your subset satisfies the definition of a subspace
@dusky epoch yep you're right, thanks! turns out I didn't know what closed addition was and thought you had to do both for some strange reason
in the criterion*
woopy:
@patent glacier
That's correct
woopy:
woopy:
Sure are~
Keep it up!
english isn't my first language, is linear algebra the right channel for matrices?
yes
so uh, I'm studying economics and I think I understand how matrices interact with one another but I struggle a lot with how to lay them out from the text I have. (not sure if I should go in questions instead?)
I have a big pdf that says how to use them yet only half a slide adresses "production ratios" and everything I have to do start with that :/
just wondering, are you french?
yes 🥖
ptdr c'est pas mal ça 🥖
👀🥖
你好
Γνοτι σεαυτον
Hello guys, is statement II true or false?
It's true you can show it by induction
can you elaborate please?
Do you know how the Vi's are defined?
every distinct pairs are orthogonal?
I mean the formula
oh gram-schmidt process? yes
without getting too far into the details of the gram-schmidt process, you have that $v_j = u_j - \sum_{i=1}^{j-1} \alpha_i v_i$ for some constants $\alpha_i$ whose exact values are irrelevant
Ann:
well, every v_j can be eventually expressed as a linear combination of the u_i for 1 ≤ i ≤ j
thus v_j ∈ span {u_1, ..., u_k} for all 1 ≤ j ≤ k, and as such span {v_1, ..., v_k} ⊆ span {u_1, ..., u_k}
does that make sense to you?
yes but how do you see that every v_j can be expressed as a linear combination of u_i for 1 ≤ i ≤ j
this can be shown by strong induction
for v_1 it's trivial since v_1 = u_1 by def
and for the inductive step it's likewise obvious from that formula i wrote out
oh i see, you can use the same formula to prove that span (u1, ... , uk) is a subset or equal to span (v1, .. , vk) right? that would show that they are equal
yes
thanks @dusky epoch !
When applying gram-schmit to polynomials, is it not a problem that this inner product definition allows for <u|v> = 0, when u and v are not zero?
Or any inner product definition really
Yeah, when thinking about the inner product you should think of the dot product as an example
The dot product is an inner product on R^n
but thats only 0 if one of the vectors is 0
No
But what about in the problem I have?
I ended up with a division by 0
And I dont know what that means
The grant schmidt process works for a collection of linearly independent vectors
So none of your vectors should be the 0 vector
The vectors I started with are all linearly independent tho
So check your work
fuck i didnt square the last integral
god Ive been checking this problem over for the past half an hour
thanks
this inner product definition allows for <u|v> = 0, when u and v are not zero?
that's called orthogonality
😛
Hey, I'm having a bit of trouble finding in my textbook how to find the number of inversions for a set of integers, it just shows sets and then it says "this is the number of inversions" but it isn't exactly clear how it gets that number
nm found the answer
or rather, found out how to do it
Hello I am needing help on creating this problem into a matrix operations. NH3 + H2SO4 → (NH4)2SO4 I am not sure how to solve this using algebra.
Can anyone help me with these two
For the first one do you know the rank nullity theorem?
I don’t, I could look
Ie rank + nullity = n
In this case n is 5
For the second one just take 2 linearly independent vector in R^3
And use those to make a matrix
@wicked trellis
So two vectors need to be linearly dependant?
Yep
Thanks
Dim(column space) is rank btw
I have a math assignment to solve some linear equation systems using "row operations", does that mean I'm supposed to use Gauss-Jordan elimination? Terms are translated from Norwegian and may be different from English terms
Yes it does, bring it to row reduced echelon form if possible then you will have a solution
That's the diagonal of 1's with 0s in the other columns?
Aye
not necessarily on the diagonal
row echelon form is this: https://en.wikipedia.org/wiki/Row_echelon_form?wprov=sfla1
reduced is the second example given
Thanks @broken hawk
Does it matter whether I follow the algorithm of reducing rows below before swapping etc?
I swapped because I would get a 0, but now I have an entire row of 0's
Tried the other way and got a full row of 0's anyway
(for a matrix in rational canonical form) why is the largest invariant factor the same as the minimal polynomial?
not really sure how to do this, the options are 0, -1, and 1
$A(A( v)) = A(\lambda v) = \lambda^2 v = 0$
kxrider:
got it, one more : if lambda is the eigenvalue of A, then is lambda also the eigenvalue of A^T?
<@&286206848099549185>
you mean an eigenvalue in both cases
det(A - λI) = det(A^T - λI)
yes
@dusky epoch this is another question (its true/false)... not really sure how to check this: Every square n×n matrix has n distinct eigenvalues.
Can you think of an example where this isn't true?
this depends on what field the matrix is over
for your class, are your matrices always with real entries?
yes
do you allow the eigenvalues of a matrix to be complex nonetheless?
actually, you don't even need that.
a matrix may have all its eigenvalues be real yet fail to have n distinct eigenvalues
 how though
how though
What are the eigenvalues of the 0 matrix?
alternatively, what are the eigenvalues of the identity matrix?
I guess that the identity matrix is a trivial example as well lol
can anyone recommend a good book on linear algebra? something that's thorough and explained for brainlets like me
😄
are you looking for applied linalg (matrix algebra and vector geometry and the likes) or theoretical linalg (vector spaces and all the theorems)
personally, I like Friedberg/Insel/Spence Linear Algebra
it’s very rigorous and imo takes the right approach of avoiding matrices where possible
but it may be too dry :P
slash not suitable for someone calling themselves a brainlet
i dont mind it being dry tbh
(note, I’ve not read through all of it. I’ve read the beginning stuff and liked it when I was starting out)
I hear Linear Algebra Done Right and […] Done Wrong are both good
but I’ve not read them at all
ive been using "Linear Algebra Done Wrong." I think its pretty good
basically, look a bit through those books and pick whichever you like, I guess
hi potato
I see you 👀
also, obviously, watch 3b1b’s series on linalg
gives all the right intuitions for the basic concepts
i already did that lmao
lmfao
honestly, rewatching them when I knew more linalg actually taught me some things I didn’t really get the first time round
yeah the visualisation component is definitely a plus when you are learning this stuff
yea, though you have to take care not to overgeneralize too much, cause not all spaces are ℝ² or ℝ³ :P
but then again there’s not that many “important” vector spaces
like, there’s $\mathbb{K}^n$ for some field $\mathbb{K}$ (in particular also finite ones), there’s $\ell^2$ and $L^p$, and maybe like the space of polynomials
Sascha Baer:
(for a matrix in rational canonical form) why is the largest invariant factor the same as the minimal polynomial?
how legitimate is this strategy for finding the RREF of a matrix? I just need any sort of method or steps to follow that will eventually lead me to the correct answer
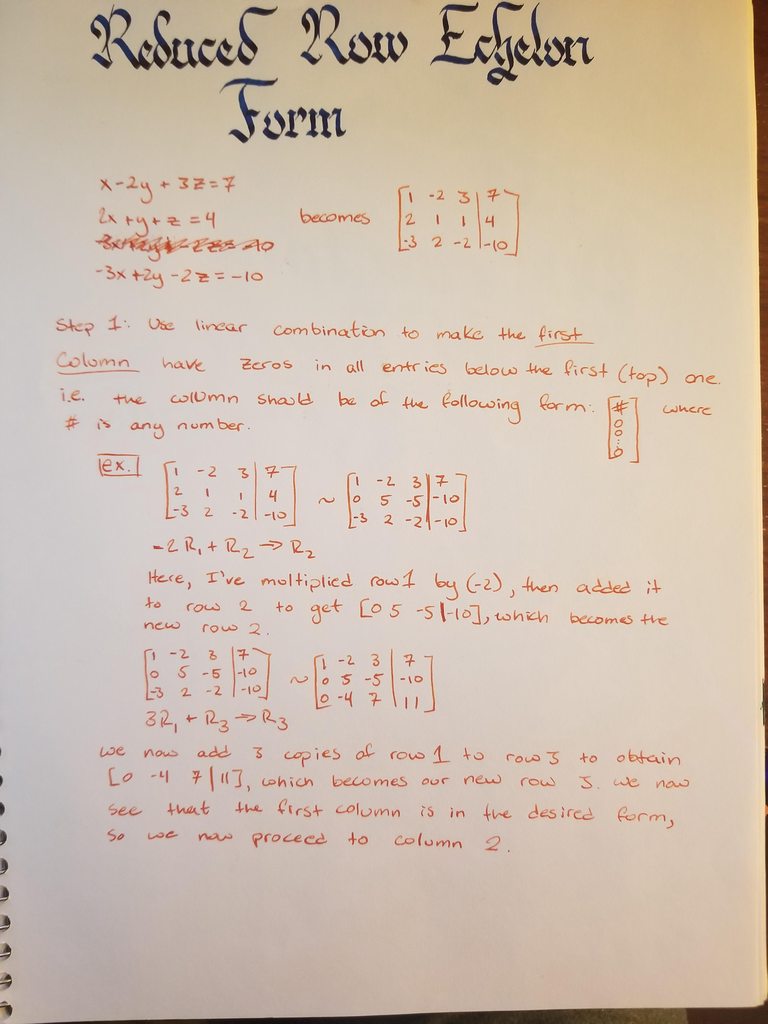
-Pick the leftmost un-rref'd column
-Pick where the 1 should be
-Whatever's there, divide it out. This means dividing the entire row. There will be a 1 there now.
-Add/subtract the other rows until that column is zero.
-Repeat.
oh shit
There's no "strategy", it's an algorithm. Computers do it
you're hype as fuck
It always goes the same way
Lel, does that make sense?
Well, I guess there can be some strategy, but it's usually easy enough to just "follow the recipe". If there's a faster way, it's not much faster
it's confusing but- it's redundant to say "interchange row 1 with (1/x) (row 1)" instead of "multiply row 1 by a scalar (1/x)" right?
they mean the same thing?
Yes, you are allowed to multiply a row by any scalar
So multiply in 1/x
I don't know what your teacher may want lel. I would accept "multiply row X by X"
thank you
i like both your methods
you get the 1's taken care of first but they get the 0's taken care of first
I don't think it really matters, just find a way to do it that works for you
Perhaps by handling the 0s first you can avoid fractions? Idunno
I have no idea what you want to do with that statement
f o h is a function. You don't "solve for x"
also, #prealg-and-algebra
ill delete my post im sorry kamen rider
for the second one, the span of any set of vectors would be a vector space
for the first one, the $f(2) = 0$ just wants you to see that when you take the sum of two vectors, call them $f_1 (x)$ and $f_2 (x)$ and let that be equal to a new vector, $f_3 (x)$, then $f_3 (2) = f_1 (2) + f_2 (2) = 0 + 0 = 0$. Therefore the space described in problem 1 is closed under vector addition.
kxrider:
you are proving that these are vector spaces, not just subspaces, so you may have to show that sums of polynomials are commutative and associative and stuff like that.
only one example suffices? we dont need a total 3?
sorry wdym?
ah okay good. Thats what i thought they might be looking for
so prove that the set is closed under scalar multiplication, vector addition, and contains the zero vector. Those are the three properties
same thing for 2. $\text{span} \right{ \begin{bmatrix}2\3\7 \end{bmatrix}, \begin{bmatrix}1\0\1 \end{bmatrix} \left} \subset \mathbb R^3$
kxrider:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
or however tf u latex that 
ty. i might have a few more problems
alright
prove that the following are not vector spaces
show that these don't satisfy the vector space axioms
find, for each one of these, an axiom that it fails
what's holding you up?
for 7, create two vectors (x, y, x^2 + y^2) and (u, v, u^2 + v^2) and show that these two vectors added together (x + u, y + v, x^2 + y^2 + u^2 + v^2) doesn't satisfy 1st coordinate squared plus second coordinate squared equals third coordinate squared
that's showing lack of closure under addition ^
can someone help me prove that
if $$[\Omega, \Theta] = 0$$, then $$e^{\Omega}e^{\Theta} = e^{\Omega + \Theta}$$
habajiga:
how would i prove this?
not using lie algebras and stuff, if u can put it in dum dum terms it would help :c
are omega and theta matrices and [,] is the commutstor?
or is this more general
if it's matrices or anything else where the argument makes sense, I would show that for all n, the partial sums of the power series with the first n terms are the same
and then let n to infinity
$$e^{A+B} = \lim_{N \to \infty}\sum_{n=0}^N\frac{ (A+B)^n}{n!} = \lim_{N \to \infty}\sum_{n=0}^N \frac{\sum_{k=0}^n \binom{n}{k} A^k B^{n-k}}{n!}$$ where I use commutativity to apply binomial theorem
Sascha Baer:
And then that is expressable as a product of the two power series
I am not sure of the definition of "row-space"
Does that mean the length of a row in the matrix?
so for a 5x4 matrix, the rank will be '5' ?
given that we're talking about rows x columns
The row space is the subspace spanned by the row vectors... Like it's written there
hey @broken hawk thanks you, yes they are matrices
to me i was thinking of using zassenhaus formula
but if im being honest i was hoping to get a proof from scratch, like starting with a taylor expansion or something, but i was unable to complete it
otherwise can just use this

Why is linear algebra notation so clunky and inelegant? I feel as if there is a better way to do linear algeba.
can you show an example of linear-algebraic notation which you find clunky?
[bunch of shit]
Oof quite the opposite, I would say linear algebra takes what should be a very complicated concept and uses beautiful notation to make it easy
Why can't we just write lines as "ax" instead of this vector nonsense?
Vectors are above lines. You use vectors when cartesian equations don't work
As well, vectors can represent anything with a certain set of properties. You've probably seen linear algebra treat polynomials as vectors
🅱ectors
I vote new name.
We take the average of 2 lines (ac+bc)x/2 to aquire a sum of vectors or lines. And if we want a certain length of the vector, we can restrict the domain.
where c is the largest domain of ax
We can go on like this to recreate all of linear algebra.
But I suppose we'll have to put up with this abuse.
You have to understand math is about oppression that's just what we do best
You can remake linear algebra using lines with projective geometry
This is pretty well known
@dull hemlock are you being serious rn
I find it incoherent, personally
as do i
they failed to answer my question, which would have been straightforward to answer had they not been full of shit
@dusky epoch Hey that was very rude of you. I am full of dirt, not shit. Have some class.
Also I identify as a book. Use my pronoun, nazi.
??? wow, name-calling?

@dull hemlock i saw that.
no you didnt
yes i did. right before you deleted it.
what'd they post 
👀
okay, you cannot be reasoned with.
@rigid cypress they posted an image corresponding to the phrase "the joke went right over your head".
talk less shit, more linear algebra
🤔
ok, your choice lmfao
woog your roles are back!
question, if a matrix A has a characteristic polynomial of 7x^3+4x^2-3x-6 , is A^T 's characteristic polynomail -7x^3-4x^2+3x+6?
x is lambda
the char polys of A and A^T match
and if you're allowing them to differ by an overall constant multiplier, you might as well identify those two you've written
got it, ty
If A is a square matrix with only nonzero eigenvalues, then A is invertible. (true/false?) I know this is a condition for the invertible matrix theorem, but does the determinent of A ALSO need to =/ 0 for a matrix to be invertible, or does this one condition work out
?
if it has no zero eigenvalues then that's sufficient
it has no kernel
so it must be injective and hence bijective
Can anyone help me with this
hint: ||a diagonal matrix is diagonalizable||
So it’s always invertsble?
nope
the zero matrix is diagonal
since every non-diagonal entry is 0 (it doesn’t matter what’s on the diagonal)
Oooo
I need some help classifying definitions
Is it correct to say that all subspaces are subsets, but not all subsets are subspaces?
Yes
Np. Is that all you wanted to know about it?
ill probably be back with more questions soon lol, thanks alot
Np good luck
when i'm trying to reduce an augmented matrix
why am I not allowed to add any number x to a row?
for example a row is [1 5 9 | 7 ]
Cuz you can't! That's not an elementary move
Imagine solving
x + y = 1
x - y = 2
And I "added 5 to the first row":
6x + 6y = 6
x - y = 2
You'd probably look at me funny
Actually that's the same as multiplying by 6 in this case, but it didn't have to be
for the elementary moves
If I chose better numbers
yea. Thats the same thing as doing (1-c)row1.
np
actually for x + y = 1 adding the same number is the same as multiplying the same number regardless of number choice, because the first row is all the same number
im pretty sure he meant number choice as in different coefficients for x, y, 1
but for like row 2 you can see by +3, x - y = 2 would become 4x - 4y = 5 which isn't the same
ah then yeah. but that's interesting anyway
the nullity of a matrix A can be found by taking the # of columns and subtracting the rank
but what exactly is the definition of nullity? what is significant about it that I should know?
can you define dimension and null space for me? if we have a (m X n ) matrix then the "dimension" is defined as m X n ?
" The null space of a matrix is any set of vectors that you can multiply a matrix by which gives you 0 as a result. " correct?
The "dimension" of a vector space refers to the number of vectors in a basis for the space. For example, the rank of a matrix refers to the number of linearly independent columns of a matrix, and the nullity of a matrix refers to the number of free variables in the solutions to Ax=0
Yes to your definition of null space.
god your explanation is really straightforward and i feel retarded for not getting it
I feel like I am missing some fundamental understanding that's gonna help me understand it
rank + nullity = columns comes from the fact that free variables correspond to the lack of column pivots and rank refers to the number of column pivots.
existing column pivots + missing column pivots = number of columns
hmm what part is confusing?
the words "spanning" , "pivot", "dimension", "basis"
I understand that a "span" is a SET of all possible linear combinations for any number of vectors
but what is "spanning"
and I think "pivot" is also very easy to explain, but I am just having trouble understanding my notes alone
ok wait I think I get your explanation for dimension
"spanning" usually refers to when the span of a set of vectors represents every vector of a particular vector space.
Pivot rows/columns are important because they have certain qualities like being linearly independent from other pivot rows/columns
if I am in R^3, have a vector (v1, v2, v3), then the dimension is 3 because the BASIS of R^3 needs 3 vectors
right but the dim(span{(1,0,1), (0,1,0)}) is a 2D subspace of R^3 for example
is it cool with you if I try breaking that down?
sure
dim(span{(1,0,1), (0,1,0)}) = dim ( some linear combination)
right, and the span of any set of vectors is a subspace
dim = # of vectors that form a basis of a space
right, and notice the two vectors I included would form a basis for that subspace
for the two vectors you gave v1 and v2, if I have v1 + 0v2, then the dim( v1+ 0v2) is going to be 3 or 2?
"v1 + 0v2" is not a space, so dimension doesn't apply there
why is v1 + 0v2 not a space? that is not a valid linear combination of the two?
v1 + 0v2 is a vector.
correct, which happens to be a linear combination where the scalar applied on v1 is 1, and the scalar applied on v2 is 0 ?
right, so its just an element of the 2D space, span{(1,0,1), (0,1,0)}
OHHHH
i have one more question that's probably gonna make my understanding complete
what if I have v1 + v2 ? so we get a vector (1, 1, 1 ) ?
that is no longer an element of the 2D space ?
no, (1,1,1) is in span {(1,0,1), (0,1,0)}
no it still is lol. Think of it this way, all linear combinations of (1,0,1) and (0,1,0) lie on a plane in 3 space. Yes, they are all vectors in R^3, but they also form a 2d subspace (like a plane) within R^3
and in presenting the linear combination of v1 and v2 (specifically, 1v1 + 1v2) that equals it, you proved that (1,1,1) ∈ span {(1,0,1), (0,1,0)}
yea but it could have any arbitrary orientation
thank god
okay first off it's $\bbR^3$, not $R_3$
yeah i get what you're saying
Ann:
and second, a subspace doesn't look like what you drew. it's an infinite plane, not a square
I drew a portion of the plane
which i should have said
is that fair?
let's say I made a restriction on the span that would give me a set of linear combinations that just so happens to make that square
please tell me im getting this
your picture is kinda hard to judge either way tbh
like i can't say you're completely clueless but i can't say you're really getting it either, however vague that notion may be
I just want to add one more thing about spanning systems that may be useful in the context you heard it. "Spanning," "generating," or a "complete" set of vectors refers to the fact that any vector in the space can be represented as a linear combination of the vectors in the set (presumed to be spanning).
In the context of linear transformations, the span of the columns of a matrix give you the "range" or "image" of a matrix. Suppose we have a linear mapping from R^n to R^m. That means i plug in vectors from R^n and i get out vectors in R^m.
Suppose the span of the columns of the matrix representation of this transformation mapped to some proper subspace of R^m. I.e. the range of the transformation is not all of R^m. That means the columns are not spanning, and that there exists some b in Ax = b that does not have a solution x. This is called "inconsistency."
Just had to get that off my chest. Anyway i gtg to bed 
@slow scroll thank you, really appreciate it
np np c:
I can successfully identify whether two or more vectors are linearly dependent but I dont know what the significance of linear dependence/independence is
have you watched 3b1b's essence of linear algebra series
bc i think it gives a good intuition for those
(start at the beginning)
if an endomorphism has dimension n and it doesn't have n lin independent eigenvectors then its not diagonalizable, right?
wdym by an endomorphism having dimension n
hey , i got asked to compute the characteristic polynomial of a matrix only composed of one number (a0) , i know how to compute the characteristic polynomial of 2 by 2 and 3 by 3 matrix but how am i supposed to do this?

or X-a0?
kek
you could do the usual determinant thing
I mean det of a 1x1 matrix is just the entry
so a - 1x1 identity matrix * lambda
det(a-lambda)
= a-lambda
no?
aren't characteristic polynomials supposed to have 1 as the dominant coefficient?
i'd say that the most logical answer would be a0-lambda
 its what i'd go with unless someone has an alternative
its what i'd go with unless someone has an alternative
they do!!
so X-a0 instead of a0-X
idk symbo agrees with me
awwh that's a different def from Wikipedia

what do you mean by 1 as the dominant coefficient x.x
wikipedia fake news tbh
Well then follow the choice that was made by your teacher



@brittle juniper le coefficient dominant s'appelle "leading coefficient" en anglais
😛
xièxie ( ^_^)
Yup
Hi I just have a quick question, can vectors in R3 span R2? My calculus teacher said it’s possible, because R2 is a subset of R3 but my linear algebra teacher said that they’re 2 different dimensions so it’s not applicable
subspace implies subset
3D vectors can span a 2D space. Calling that space "R^2" is a weird choice.
Unless I'm not thinking about any specific cases, there's a bijection between that space, and R^2? This might be enough for your calc teacher to consider them equivalent
"3D vectors"
i think "3D vectors" is a horrible term and shouldn't be used
ok lemme rephrase
a set of vectors in R^3 can span a two-dimensional subspace of R^3
but that two-dimensional subspace is not to be identified with R^2 itself
what is Proj?
does it just mean $$ \begin{pmatrix} 0 & 0 & 0 \ 0 & 1 & 0 \ 0&0&1 \end{pmatrix} + \begin{pmatrix} 1 & 0 & 0 \ 0 & 0 & 0 \ 0&0&0 \end{pmatrix} $$ ?
kxrider:
i would assume proj_yz means to project onto the xy plane, but idk what proj_x is supposed to mean
Proj is projection
: D
whats wrong with what i have above? the first matrix is Proj_yz and the second (would have to be) is Proj_x
no it doesn't matter, I was just distinguishing between them, since Proj_x is still ambiguous here haha
Im guess
If u have the yz plane
The x plane is the orthogonal piece
Which is what the formula says projv+proj(orthog)=i
I guess?? but at the same time, wetf is "x plane" supposed to mean? It sounds like a top secret jet fighter to me.
oh ok. that makes sense i guess
So x plane and yx plane which are orthog to each other
But idk how to prove that it =I3
I sub 3
I just did it
https://cdn.discordapp.com/attachments/540211747613704221/563052251950743729/195237017049759744.png

O
thats Proj_yz + proj_x
What does I sub 3 mean though
the 3x3 identity matrix
yep
yea i guess. I've never actually seen that notation before but im pretty sure that is what it means
Ok cool
And uhh do u know how to do 4a? 😅 I was able to do 4b by doing proj L and just switching the signs to get proj orthog L
I know u get the unit vector from@the span
But then is that orthog L or do i still need to do@somethin to it
span{1,1,1}? Those are all the same vector
I have no idea what to do here...
do you know what "matrix for T relative to B" means
does relative mean similiar/inverse?
no
ok, thought its some kind of synonym
is it not this
i guess that's the more general case
but point is
calculate where T sends each vector in B
yes
i dont get why

the hard way would be to write out a general linear combination of B and set it equal to each of the T(b_i) in turn
yes
that's just a matter of calculating the values of T at the basis vectors lol
thats not what im getting though
http://mathb.in/32578 can someone help on how to start ?
What is L(E)? @wintry steppe
set of endomorphisms E->E @earnest vessel
i'd answer the q if i didn't have to go to sleep 
Yes
I would suggest looking at ker u
@earnest vessel whan can I do with ker u there ?
There is a useful criterion for linear maps that relates injectivity and the kernel
Okay, then let me phrase it differently
Suppose u were bijective
And take a nonzero element x in E
What can you say about u(x)?
I mean about the element u(x)
inversible ?
What does invertible even mean for an element of a vector space?
No, you said ker u = 0
That is right
That means precisely that the only element that goes to 0 is 0 itself
In other words, the image of a nonzero element is a nonzero element
Is that clear to you?
y
So if u^p is bijective E should be {0}
And I know that dime E > 0
So it's not possible to have u bijective
right ?
true thx
Prove that if $A$ and $B$ are similar matrices, then $\det A = \det B$.
kxrider:
im at my wits end on this one
Two matricies are similar if
PAP¯¹ = B
ahh wait, $\det B = \det (Q) \det(Q^{-1}) \det A$
kxrider:
Yes yes
and $\det(I) = \det(QQ^{-1}) = 1$
kxrider:
duh 🤦
Sure, also det(Q¯¹) = det(Q)¯¹
yes that would make sense
In general, det(Aⁿ) = det(A)ⁿ
Shitty alternative proof- similar matrices have the same eigenvalues
And determinant is the product of the eigenvalues
hmm haven't learned eigenvalues so can't use that anyway.
here, im confused by Re z and Re w, isnt z and w nonreal ?
a non real number refers to a number a + bi where b is not zero. a is not necessarily 0
oh yeah 🤦
ty
i dont think that statement makes sense though, arent there possibilites where that matrix has real eigenvalues?
@wintry steppe
in affine transformations, f(p)= f(p0) + f'(p0p) (f' linear part) is itr true for every vector that f' (a) - f'(b) = f'(a-b) ?
that doesnt work for just f, right?
yeah idk zo, z = 1 + i, w = i are clearly nonreal, but clearly the matrix then has an eigenvalue 1 which is real.
besides, almost any real matrix satisfies this property!
exactly
why not take z arbitrary nonzero and w = iz, and see what comes of it
Im not sure I understand what you are asking, dog, but if f'(x) is a linear function, then by definition f'(a)-f'(b) = f'(a-b)
oh yeah ann then u got a rotation matrix thats cool
I still dont really understand what they were trying to go for though
More generally if re(w) = im(z), then the matrix is symmetric and so has real eigenvalues
anyone understand why a basis is obtainable by finitely many column interchanges of the identity matrix? Obviously this works for a standard basis in R^n or something, but I am having trouble seeing this for an arbitrary basis.
Also part c of this question
I was stuck on the possibility that $P^N$ could just loop through a few permutations, never returning to the identity, but I came up with the idea that if we let $N>k$ then we can write $P^N = P^k$ to represent the situation where some finite composition of $P$ goes back to an earlier permutation, then I multiplied both sides by $P^{-k}$ to get
$P^{N-k} = I$.
kxrider:
is this a valid proof? It seems a bit convoluted so I thought I'd ask if i forgot something. 🤷
@slow scroll
That is indeed a valid proof.
i have a new question lol....
Are you sure you didn't look it up? That mirrors the proof that all members of a group will return to identity after being multiplied by itself some number of times
Which is exactly what's happening with these permutation matricies
Fair enough lel
completely stumped here. It has an even number of permutations because n! where n >= 2 always has 2 as a factor.
Odd/even permutations refer to the number of times two numbers are interchanged. I have no clue why half of the permutations would be odd.
https://cdn.discordapp.com/attachments/550859457308000276/563570955251744779/unknown.png

Hmm. Well, an even permutation has a determinant of 1, an odd permutation has a det of -1
ye
That's how you use the hint. How to solve that exactly half are even/odd...?
if A is a 9x9 matrix describing a permutation of (1,2, ...., 9) then det(A) = 1 if A represents an even permutation and det(A) = -1 if A represents an odd permutation. Thats as far as I've gotten lol
There's an even number of odd permutations
Is immediate
I'm not sure that's useful lel
how do you know that? 
Two odd permutations, when multiplied, gives an even permutation. Multiply them all together, the result should be determinant = 1
There needs to be an even number of odd permutations, so (-1)ⁿ = 1
wait a second, det(A^n) where A is an odd permutation and n varies from 0 to Perm(9), alternates between 1 and -1. If it does that an even number of times, then half will be 1, and the other half will be -1. -1 corresponds to odd permutations so half of the permutations are odd
is this free?
is what free?
the chat

{kind=link}
{kind=link}
lul.... maybe u could help me then. The set => {x( 1, 0 , 1) + x(1, 0, 0) + y(0, 1, 0) + z(0, 0, 1)} can be considered as R^3?
are x, y, and z just scalars or something?
they're equivalent to ( x, y, z)
not sure what you mean by that, but span{( 1, 0 , 1), (1, 0, 0), (0, 1, 0), (0, 0, 1)} = R^3
i'll post the whole question
were given two subspaces, W and U. Where U belongs to R^3 and is formed by (x,y,z) where z=x
and W same but with the rule x+y+z = 0
i have to prove that U+W = R^3
oh okay. Then yea, its just a matter of checking whether the span{( 1, 0 , 1), (1, 0, 0), (0, 1, 0), (0, 0, 1)} = R^3
which it does.
but how do i properly check it?
i know i'll have something like (2x, y, z+x)
which is a bit different than (x, y, z)
wait x + y + z = 0 and x=z for W?
(1, 0, 0), (0, 1, 0), and (0, 0, -2) form a basis for R^3
you can represent any vector in R^3 as a linear combination of those three vectors
i let x = 1, and y = 1, for my basis vectors, so x+y = 2. To satisfy x+y+z = 0, z = -(x+y), which is -2
got it. but that sounds different from the basis from R^3
and where went the (1, 0 ,1) vector?
you don't need it. its redundant. There are many bases for R^3. The conditions are that the vectors in the basis must span all of the space, and that none of the vectors are linear combinations of each other. I chose those 3 specific vectors for my explanation because it is easiest to see that those conditions are satisfied.
got it! that vector would be equivalent of having ( 1, 1, 0) right?
so if put that "2" on my test, teacher should still give me correct, right?
no worries
This is our basis for W
hopefully you can see why,
x(1, 0, -1) + y(0, 1, -1) = (x, y, -(x+y)) for all x, y in R
We have 4 basis vectors to choose from now to make our new basis
got it
actually is a bit confusing
but i guess i'm just not that used to see things like this
we need to show that we can represent any vector in R^3 with these four vectors (or fewer)
@full palm Do you have a way of doing this? xd
i'm not sure
do you know about matrices?
no. one sec
like for (0,1,-1) having: (0,1,0) and (0,0,-1)
okay so our goal is to show that the system
$$ \begin{bmatrix} 1\0\1 \end{bmatrix} x_1 + \begin{bmatrix} 0\1\0 \end{bmatrix} x_2 + \begin{bmatrix} 1\0\-1 \end{bmatrix} x_3 + \begin{bmatrix} 0\1\-1 \end{bmatrix} x_4 = \begin{bmatrix} a\b\c \end{bmatrix} $$ has solutions for all $a,b,c \in \bbR$.
kxrider:
this is represented by the matrix $$ \begin{pmatrix} 1&0&1&0\0&1&0&1\1&0&-1&-1 \end{pmatrix} \begin{pmatrix} x_1\x_2\x_3\x_4 \end{pmatrix} = \begin{pmatrix} a\b\c \end{pmatrix}$$
kxrider:
equation*
if we can show that the row echelon form of the matrix is consistent, (pivot in every row), then we will have proved that there will always be solutions, aka there is always a linear combination of columns that represents an arbitrary (a,b,c).
thats honestly the best I can come up with rn, other than saying that "these vectors are obviously not linear combinations of each other!"
oh okay cool!
and if the vectors were linear combinations of each other, that would show up as a reduction in column pivots. Since there are 4 vectors here, at least one of the vectors is guaranteed to be a linear combination of the others, so there should not be a pivot in the last column in theory
got it!
sick
again, thank you so much for your effort!!! it meant a lot to me and helped to save a lot of time!
np glad i could help!
have a great night, thank you very much!
np u too
hello , do you perhaps know any good linear algebra 1 online courses that you'd recommend? i have a linear algebra 2 midterm next week but my basics are way too weak for me to understand linear algebra 2 correctly and my teacher didn't put any notes during the first semester
MathTheBeautiful Channel on yt has a nice course
i'd prefer courses as in written since i don't have much time sadly
you're gonna have to tell us what Linear Algebra I entails
curricula are not standardized globally
Hmm, basis in R^3 can't have four vectors, it must be exactly 3 to span whole R^3. If there are 4, one is a linear combination of one of the others
Oh sorry, looks like someone already said that above.
Ah maybe the question was already answered and dealt with.
I just finished 2 linear algebra courses at my university, one started at Fall and one at January
So I've got a parabola (y=2x^2)
I move it to the coordinates (2,-4)
How do I find the equation of the new parabola?
I'm unsure of how to find the equation of a parabola in general
is nullity the dimension of null space?
yea
np np :p
the nullity is basically the number of vectors that DONT form the basis?
... for the column space, yes
column space = span of column vectors
is there such thing as a nullity for the row space?
its called the left null space
there is no secret for figuring it out like the row space tho. You just have to solve A^Tx=0
I thought row space is the span of the row vectors?
it is, but Col(A) = Col(A^T).
I was just saying that there is nothing analogous for null spaces
np
for column space, say I have a 3x5 matrix, what exactly is an example of the column space? - I get that it's a set of linear combination, but how would one calculate one possible linear combination of that set?
The column space is the set of all values that the variable of b can take on in Ax=b
If you wanted one possible linear combination, just plug in a vector for x i guess