#linear-algebra
2 messages · Page 5 of 1
Failed to associate low temperature and linear algebra
that said, kay, not every matrix/transformation has a full set of eigenstuffs
especially if you’re not over an algebraically closed field
(ie ℂ in practical applications)
My life is a lie
algebraically closed = every polynomial has a root
over ℝ the characteristic poly may not have any roots ⇒ no eigenvalues
We're likely working with subsets of ℂ here. Yes this gets weird for weird fields
but I know what oyu mean
matrices over ℝ may not have any eigenvectors, and ones over ℂ may not have enough eigenvectors to diagonalize it
Ah yup.
because just because the characteristic poly has a root of order, say, 3, does not mean there’s 3 independent eigenvectors associated to it
there’s at least 1, but that’s all you can guarantee
ok so theres when the complex things come into lin algebra or wat?
Duplicate roots are meh
pretty much; also in many applications using ℂ is more useful
e.g. physics is all about htose complex numbers
you can probably do some interesting math by replacing equality with some weaker notion
just pick your favourite equivalence relation
and define that as your new “equals”
and see what happens
I mean you could see what happens when you work with the computer science equals: two numbers are considered equal if their difference is smaller than 2^-n for some given n
note: I doubt you’ll get a very interesting strucutre, and this weaker equals is not transitive
but at least it’s symmetric and reflexive, so that’s something
Yeah
So, here is the thing:
Why am I even doing math
It seems like I'm delving into some nonsense no matter what field of math I learn
It is logical and sound, indeed, but what's the point
Oh, answers?
- There may be practical applications you care about that you can appreciate or understand better with deeper knowledge
- Just do it for the heck of it; math is fun and interesting, and often quite beautiful
- Even if it may not have any immediate use, often mathematical research suddenly found unexpected applications; thus furthering human knowledge in mathematics is something worth doing for its own sake since you never know if it might not just solve world peace and cure cancer
I’m mostly in camp 2
math is certainly not nonsense
it’s like music or art, but it also keeps satelites in the sky
Uh
Do you mean calculation?
Or do you mean engineering
Also I'm not the only one on camp 4
Lots of people who dislike math are in there
I mean the fact that without math, we wouldn’t have general relativity, and without general relativity we couldn’t figure out why the heck our satelites are drifting off their paths, except we couldn’t even compute the (wrong) paths anyway so we couldn’t keep them flying autonomously anyway
Math is an art
💯 .
@frosty vapor counterexample, math is useless.
My savior 💙 .

yea exactly katzen
is there a practical version of gradient with quaternions?
Sascha : General relativity uses math just as model. I think it could have used philosophical model instead
And calculate things based on that.
Like, 'There is no absolute time frame'
everything just uses math as a model, the universe could have something different in its source code
You can use math to model things, it's not the other way around.
In the same way, you can use logic and intuition to model things as well
Also lots of other variations we are yet to reach out
um
 wtf is going on here
wtf is going on here
the philosophy of linear algebra
I have a question: Is the rref of a matrix unique? It obviously is for invertible matrices as they all reduce to the identity, but idk how you would explain it for others.
i still wanna know if i can easily sub quaternions for everything in vector calc
you don't want to
division rings are hell
do you know any algebra?
oh, vector calc
haven't seen that one in a while
thought u meant replace your field with quaternions
that would be pretty crazy
(you can a lot of the time, it's not not so pretty)
though i guess that would be something i would try if it seemed possible
Quaternions for 3d vectors?
Hmmm
At least, it cannot represent all linear transformation of 3d vectors.
Have a super basic question about sets if someone can answer
B = {b1, b1, b2, b2, b3} C = {c1, C2, C1, C2, C3}
What is BC? Is it the same as union?
For example: {b1, b1, b2, b2, b3, c1, C2, C2, C3}
Trying to understand so I can figure this out: https://imgur.com/a/aEO7mdX
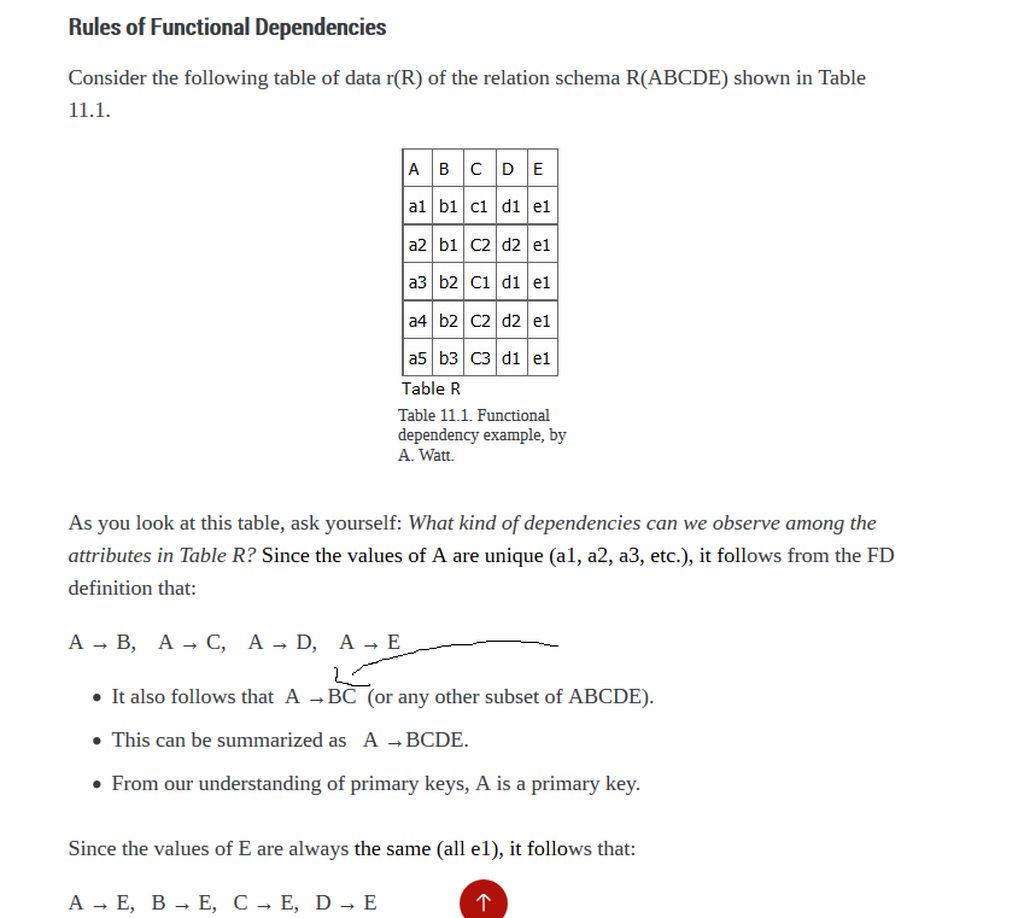
how's BC defined in your text?
let f:E-->F an injective linear application
then if G and H are two subvectorial spaces of E such that G + H is direct, then f(G) + f(H) is also direct
my question is, if f is not injective, on what condition on G and H can we find f(G) + f(H) to be direct
i can't find that condition
Working in any dimension or finite dimension?
any
Also, do you want a necessary or sufficient or both condition?
just sufficient
mhmm if (G+H)∩Ker(f) = {0}, then the kernel of the restriction of f on G+H is {0}, so the restriction of f on G+H is injective
and of course you have $f(G)=f_{|G+H}(G)$
Tuong:
and the same, with H
because G is a subset of GUH, which is a subset of G+H
and so, I think you can use the result in which you have injectivity
i was trying to find a condition to get the injectivity cuz thats the only way
i didnt think about this
nice ty
You're welcome
OH MY GOD THIS IS FUN
if T is diagonalisable/triangularisable/JNF-able/[insert decomp or form here] is f(T) also?
f is a poly over k, f(T) is the evaluation at T
@proper crescent
actually um
more actual question
if T is diagonalisable/triangularisaible must there exist a automorphism Q such that QTQ⁻¹ is diagonal/triangle for some arbitrary fixed basis
Lemme rephrase
Let Q be a diag/triangular matrix. Let B be a basis. Does there exist Q sucht that QTQ^-1 is diag/triangular in the basis B
something about change of basis matrices

are all invertible matrices triangularisable?
pretty sure no, consider the matrix in M2R corresponding to 90 degree rotation
are you saying we can always choose our automorphisms to be diag/triang-able?
I'm not sure you can do that
ex: -5C^-1.. Do i multiply by 5 first then inverse? or inverse then multiply by 5? or does it not matter?
doesn't matter
ty
np
Hi guys, is this statement true? A matrix is nilpotent iff it has 0 trace and determinant
if M is nilpotent then M^k=0 then use tr(AB)=tr(A)tr(B) and det(AB)=det(A)det(B). If matrix has 0 tr and det then its similar to an upper triangular matrix where the diagonal are all zeros(not sure about this direction)?
@fervent totem trace is not multiplicative
nilpotent implies trace and determinant 0, that much I know is true
the converse I'll need to think about
are these matrices over C?
nilpotent matrices are similar to block diagonal matrices where each block is a jordan block of 0 on the diagonal
yeah
but im trying to think why thats true
In linear algebra, a nilpotent matrix is a square matrix N such that
N
k
=
0
{\displaystyle N^{k}=0\,}
for some positive integer
k
...
ah
because the eigenvalues exponent to 0
every complex matrix had a Jordan normal form
each block has its corresponding eigenvalue along the diagonal
and is upper triangular
when you multiply upper triangular matrices, you multiply entries on the diagonal
@fervent totem
ahh right I think get it
but the converse doesn't make sense
just by using the same argument
trace 0 doesn't mean all the eigenvalues are 0
just that their sum is
if it also have 0 det doesnt it force all eigenvalue sto be 0?
no
yeah
Thanks!
np
If A is an mxn and B and C are two different vectors in R^m, with Ax= b and Ax= c both being consistent with solutions that are planes in R^n, why is it that these two planes might not intersect with specfic vectors b and c
Dont they live in the same space, so with certain B and C there is a combo where the planes can intersect?
because if b is not equal to c
then for x in the intersection
you have Ax = b
and Ax = c
which implies b=c
@livid crow
So they are essentially the same plane?
And therefore they cannot intersect each other?
@jagged pendant
thus they are linear combinations
which is why they are different vectors but really the same vector
with one of them having a different weight
i still cant wrap my head around it i got this question and another one on my exam wrong and Im sitting here trying to figure out why, just not clicking
matrices are functions of vectors
for a unique input, there is a unique output
it cannot equal two different things at the same time
therefore the solutions to Ax = b and Ax = c cannot overlap
as that would suggest Ax is equal to both b and c at the same time
alternatively, since they are linear, you can subtract them, and get
A(x-x) = A(0) = 0 = b-c
but b != c means b-c is nonzero
"for a unique input there is a unique output"
isn't that only true for an injective linear transformation?
If you have a mxn matrix where n>m, then I don't see why you couldn't have intersecting solutions?
So with that explanation im getting the understanding that nothing can intersect ever?
no you got it the other way around
for a unique output there is a unique input
it's like the vertical line test vs the horizontal line test 
Okay okay let me try again
Nevermind I cant get seem to understand why when b=c it means they wont intersect
you mean b!=c lol
right right but looking through woogs work he said since ax=b and ax=c b=c
okay using x as the input is confusing things i think
if Ax = b
and Ay = c
and b=c
then x=y
and suppose that if v = (1,1,1), then Av = b, and Av = c
well, you can just multiply them together
and explicitly calculate what Av is
it cant be 2 different things at the same time
so if it cant be two different things then they are one in the same no?
lets say i have x1v1 + x2v2 = b
and we know the values of x1 and x2 (scalars)
those same constants won't solve x1v1 + x2v2 = c
because x1v1 + x2v2 = b
thats all woog is tryna say
Ohhhh so because they are different vectors that both are solutions to Ax there is no possible way for them to have the SAME solution so there is no intersection point
yea i think you got it
sort of im bad with this conceptual stuff, gonna talk to proffessor about it to solidify it more
well kinda like woog was saying, we are dealing with functions that have a unique output for any input. It passes the "vertical line" test.
the only way for Ax = b and Ax = c to have the same solutions is if Ax somehow simultaneously equaled b and c where b!=c
Which isnt possible cause they arent equal
thats where he said the contradiction comes in
ya ya its making more sense
If the columns of an nxn matrix are linearly independent they then automatically span Rn due to the fact that they can be written in the form c1v1 + c2v2....cnVn with all cs just being zero correct?
well, due to the fact that that you need at least n vectors to generate R^n.
err you got it mixed up i think
" c1v1 + c2v2....cnVn with all cs just being zero correct" means they are linearly independent. They are generating because you have at least n vectors and they are linearly independent. In other words, you are linearly independent because you have a pivot in every column of the matrix and generating because you have a pivot in every row of the matrix.
if you have a square matrix and every column has a pivot <=> every row has a pivot
np! c:
Not sure what Axler is
the guy who wrote "linear algebra done right"
Looked at a previous edition, he has nearly the same paragraph except he just writes "and replace the 2 or 3 with an arbitrary positive integer"
Basically you just take ordered n-tuples of elements of F
👍
Oi I need some help yo so ima post something but before I do can i post a screenshot or nah?
SO Like in 35 I have this question and watch so I need to show
W = + or - || pq|| |project of F onto PQ|| ok?
wtf anyway
this isnt linear algebra tho?
it is.
its in my linear book
anyway
|| Project pq onto F|| = ||F|| ||cos(thetha)||
....
So I plug it back into the original equation and I get
- or - |PQ| | | | PQ || cos |
but since the cos is in the absolute value it will never be negative so how will I solve this 😐
explain where the signs ill be and all that
@me when anyone can help much appreciated and all that @wintry steppe miss you from your biggest fan
@wintry steppe
you use -ve for the case on the left
+ve for the case on the right
i got this problem for homework today
and i got 11a and 11b, but i couldnt do 11c
can someone help me through the steps?
$\vb*{a}$ is parallel to $\vb*{b}$ \implies $\vb*{a} = k \vb*{b}$
Cosmicrays:
Compile Error! Click the None reaction for details. (You may edit your message)
For some k
yes
do you know how to find the angle between two vectors?
do tri-diagonal matrices have to have the same value along a diagonal? for instance, 2 on the main diagonal?
thats given in the question, its 60
okay one of y'all will have to move.
Oh wait I read the wrong question
@mystic goblet that's not what i mean. what i mean is, if i gave you two vectors, would you be able to find the angle between them?
well then.
what's stopping you from doing this in this problem?
you will express the angle in terms of m
and from that, find the value of m
i tried that, but i dont get the same value
i tried to solve for m using a.b = |ab|cos∅
and then solving for m, but i dont get the right value
i squared both sides
oh right
there goes your fuckup
is there a name for this D matrix? I don't really get what it is, can someone tell me what to look up or explain what all the O's and I's mean?
oh wait, I got it, nvm
Can you find a basis for a set in R3 that contains only the zero vector?
"a set in R3"
do you mean a subspace of R3 or all of R3?
Hey how is that possible
all of R3
no because the zero vector does not generate all of R3
A basis has to have linearly independent vectors
How zero vector can be independent?
i'm not saying {0} is a basis for {0}.
it is indepdent, but not spanning lol
i'm saying {} is a basis for {0}.
if you think otherwise, give me a nontrivial linear combination of vectors from the empty set which sums to zero
well i mean ok
no
{} is a linearly independent set.
While any scalar multiple of zero vector is zero vector
Zero vector is dependent
Hence cannot be in a basis
You imply that you can do so?
i do not.
i'm saying {} is a basis for {0}.
This we know
But this is the zero subspace
it is
Well I cannot argue with you.

the empty set is a basis for the zero subspace if you define the empty sum of vectors to be 0 (which is the only sensible definition, really)
who doesn't define the empty sum to be 0?
idk but you do have to define it somehow
and I mean it’s ambiguous
if you sum no vectors, you get the 0 vector, but if you sum no numbers, you get 0 (the real number)
but 0 (number) ≠ 0 (vector)
i mean
an empty sum still takes place in some known abelian group
and its value is then that abelian group's zero
Can a trivial solution to Ax = b also be considered a Unique solution
unique solution means there is only one input of x that outputs a b
I've only heard of the trivial solution to Ax = 0, namely x is the zero vector
So it's a confusing question to me
yeah i don't really know what he was asking xd.
Ah maybe there's a useful fact to know about a matrix A if the only solution to Ax = 0 is the trivial solution
yeah theres that
What would that tell you about A?
are you asking me?
Asking anyone
well it tells you that the solutions to Ax = b are unique for all b. i.e. the columns of A are linearly independent
Ahh ok
but it doesn't tell you anything about the existence of solutions to Ax=b, so you could still have a value of b that doesn't have a solution because b is not necessarily in the span of the columns of A
is matrix 2x2 sqrt(2) 0 in first row and in second 0 sqrt(3) diagonable in R and not diagonable in Q?
if diagonable is even a term since I couldnt find the word in english
diagonalizable is the correct word but idk anything about it
since sqrt(2) and sqrt(3) are not rational numbers, that is not a matrix over Q at all
but what I suspect you actually mean is whether a matrix which is similar to that one with rational numbers is diagonalizable
in which case, the answer is no
oh true
because the diagonal entries are unique
there’s no way to get another diagonal matrix out of it (up to switching the order)
but what would be the example of matrix 2x2 in Q that is diagonalizable in R but noit in Q?
ohh ok I know
I get it
uh, well, I mean the idea is good, you just have to find a matrix with rational coefficiants that is similar to that one
when I get a characteristic polynomial and it has only compelx roots, right?
then it won’t be diagonalizable in R either
okk
found one
the diagonal entries would just be the eigenvalues
which are not rational
done
(just guessed at random)
wait
but to get characteristic polynomial I subtract lambda from diagonal
and then determinant
but the det of this will just be -1?
fine, if you want that
nvm, got it thx
you have to do $\det \begin{pmatrix} 1 - \lambda & 1 \ 1 & -\lambda \end{pmatrix}$
Sascha Baer:
yeyeyeyeyeyeyey
I just cant subtract from zero
also I have a problem that Im not sure if its done or how to do: given matrix n x n if it has n different eigenvalues show that it is diagonalizable
so characteristic polynomial will be sth like (λ-a1)(λ -a2)...(λ -an)
each subspace V(a1) will just be lin of some alpha1
So I thought that basis of this matrix will be {alpha1,alpha2,...,alphan}
what conditions do you have that will let you conclude that the matrix is diagonalizable?
like what tools do you already have?
similiar matrix
wdym?
In linear algebra, two n-by-n matrices A and B are called similar if there exists an invertible n-by-n matrix P such that
${\displaystyle B=P^{-1}AP.} {\displaystyle B=P^{-1}AP.}$
like do you have any statements of the form “a matrix is diagonalizable, if…”
yea I know what similar matrices are
dog:
ohh
I’m asking you why you’re saying that word
yeah so A is diagonalizable if and only if A is similiar to diagonal matrix D
that’s the definition, yea
also something about basis of eigenvectors
eigenvectors
if anything
eigenvalues are just numbers
you can’t make a basis from them
yes I know
hmm so diagoalizable if matrix from standard basis of the endomorphism has basis made of eigenvectors
right?
which endomorphism
an endomorphism doesn’t have a basis
an endomorphism is a function
I mean matrix of some transformation from standard basis to standard basis is diagonalizable if its basis is made of eigenvectors
dont tpype
I’m not being pedantic here
sry sry
I’m trying to figure out what you’re saying
like, I know the theorem
but it’s not what you’re saying
hmmm
you should look it up in your notes
but a transformation has no basis
that doesn’t make sense
Ok, A is diagonalizable if and only if A is similiar to some diagonal D. Also, given endomorphism phi in K^n such that M(phi)st to st = A is diagonalizable, meaning K^n has basis made of eigenvectors
I mean, yes, kinda, I typed it at the beginning but not sure iof its correct
(really what you should have is the theorem: if there exists a basis of Kⁿ of eigenvectors of A, then A is diagonalizable)
(that’s the one you need)
(you wrote the other direction)
then you can show that if the eigenvalues are distinct, then their eigenvectors are lin. indep. and therefore form a basis, qed
I’ll leave the details to you, I need to go to sleep
ok gnight adn thx
matrix multiplication
composition function🤔
does anyone know how to do this problem
i was under the impression i had to get X and Y so the three matricies on the right multiplied out to be the matrix on the left
but apparently thats incorrect
uh yes, that’s what you have to do. and obviously I = identity and S = D - CA⁻¹B
elimination
is it C since BA is not accounted for
just go thru them one by one
yes but without plugging in a matrix how would i know
A^2 is invertible. Its inverse is just A^-1 applied twice
umm is b?
d is invertible because A^2 + AB = A(A+B) and c is because A^2 + AB + BA + B^2 = (A+B)^2
noice
this makes sense, right? since (AB)^T = B^TA^T and (B^TA^T)-1 = A^T^-1 B^T^-1 ?
yeah
ok ty
hint: try to find a matrix whose square is -id
I'm lost as to how to set up a matrix to solve this
Anyone got a clean proof showing upper traingular matrices are nilpotent. CBA to do induction on the ijth component of a matrix?
Got it nvm
upper triangular matrices with zero diagonals you mean?
Yeah I should have specified strict upper triangular matrices
But I got the answer^^
need help on a text reveiw
what parts don't you understand?
Hello, is the answer to this question (III) only?
since I can think of a counterexample, nope
are we assuming u, v and w can't be 0? (if we aren't then ... this is a pretty boring question)
I think they're all true? Am I derping here? How did you rule out I and II?
Oh, I didn't think of the case where u, v, w may have been identical
Yep
if u, v and w equals 0, what does it imply? that it could be a linearly independent set
?
Or linearly dependent themselves
Also I) is a set of 4 vectors in R^3
So II may be wrong, but I is definitely right?
yes
frick i misread
I is correct, others arent
III is wrong?
yes
why is III wrong?
v and w dependent
I guess that's still fine 
ok take u,w independent, v=0
has solution
(0,1,-1)
u = (-b/a)v - (c/a)w
i.e (a,b,c) = (0,1,-1)
and then u is free to be anything you want
But then you don't have non trivial solutions
OH you're right
explicitly, u= (0,0,1), v=w=(1,0,0)
has solution (0,1,-1)
but u is clearly independent
Right, I assumed you could divide by 0
tsk tsk tsk
oof
erm, so is III the only answer?
silly kaykay 
nope III) is wrong we have counterexample
Only I
yep. do you see why, Contredict?
Okay, so say you're checking one by one if the first three vectors are linearly independent
And say you're fine up to the third vector: i.e the first three vectors are linearly independent
what do you know happens if you have 3 linearly independent vectors in R^3
the entire set is linearly independent?
We aren't worried about the third vector just yet.
Hmm, have you come across the term basis before?
yes when it is linearly independent and it spans across a vector space
Yep. So we have three linearly independent vectors in R^3 - that means ... ?
well i mean I have a massive hint to the answer I'm looking for by asking about bases
the set is a basis for R^3? idk 😦
yep
but how do we know it spans R^3 which is the second condition
If n is the dimension of your space and you have n linearly independent vectors then they span
you can find proofs of that in a lot of places - it's a fairly standard result
okay but i'm trying to link back to what you said initially
if you're willing to accept it for the moment then we can move on
So we have three vectors which span R^3
if we add another, can it be linearly independent?
what I don't understand is the part on the trivial solution
if it has non-trivial solution, wouldn't it imply that it is a linearly dependent set and so at least one of the vector can be written as a linear combination
of the other
Yes, at least one
That one does not have to be u
oh right, but can you explain the workings you guys did above, something about assigning dependent and independent to u, v and w
So we want a non-trivial solution and for u to be independent from the other two
why do you want u to be independent from the other two?
Yes
As you said, at least one of the other vectors has to be a linear combination of the other. In this case, we're only left with v and w, so lets make our lives easy and pick v=w=(1,0,0). These are clearly linearly dependent and we can find a non-trivial solution regardless of what u is
am I right to say that v and w are linearly dependent because they are scalar multiple of each other?
if u is a linear combination of v and w, would that mean there's a linear combination between v and w as well?
not necessarily
(1,1,0)=(1,0,0)+(0,1,0)
Also this is going a bit off topic: do you get how to find a counterexample to III)?
i get up to the point where v and w are linearly dependent
Great, so to find a counter example all you need to do is pick a u that's linearly independent of v and w
Because then a=0, b=1,c=-1 is a non trivial solution
(or you could just say one exists for the equation av + bw on its own since we know v and w are linearly dependent)
okay
did i make sense?
wait, how do I pick a u that's linearly independent of v and w
I can understand a = 0, b = 1, c= -1 is a non trivial solution
well we specifically chose v=w=(1,0,0)
you have a lot of choice for a linearly independent vector
you have a lot of choice because a = 0 right?
okay, so how i'm understanding it is that, referring back to the original condition, we are trying to find a counterexample for u being dependent to v and w, and from the example where v = w = (1,0,0), we can establish the non-trivial solution as (0,1,-1) and this shows that u is independent to u and w
It doesn't show that u is
but it shows there's a non-trivial solution regardless of what u is
so we just pick a u independent of them
Because then we have a u that is not a linear combination of v and w, and we have a non-trivial solution which exactly what the statement says can't happen
Imma sleep soon but do you get how this works?
Great
most patience teacher award goes to you
I'm not sure how to answer this using some argument involving dimension, but just to answer the hint, the dim(span(v1 v2 v3)) < 3. Thats all i know. Does that mean w1 w2 and w3 are linearly dependent as well, since this subspace cannot have 3 linearly independent vectors or something like that?
Hint before I sleep: consider where w_1, w_2 and w_3 are
they are linear combinations of v1, v2, v3, elements of a subspace with dimension < 3. so yeah i guess since the subspace has dimension less than 3, then there would be less than 3 vectors in any linearly independent set of vectors.
UV=8 UW=-7 VW=6 -2U+6V=X what is WX can someone plz halp me I don't understand how to solve this
<@&286206848099549185>
@wintry steppe if this helps, these r the three conditions that make a subspace:
i think it should be b since a. c and d do not include the origin
which would account for the first property
lets take b. for example. Each vector of this subspace would look like
(x, -x/2) where x is in the field. Now to verify that this set is closed under addition.
let y be an element of the field
then (x, -x/2) + (y, -y/2) = (x+y, -(x+y)/2)
x+y is just another element of the field, and this vector still has the same form from before. so this is closed under addition. Check for multiplication now.
actually.... lol. You can still do this, its fine, but there is an even more basic thing to check: is the the zero vector an element of any of these subspaces?
@slow scroll thats what i was saying right above 😛
b is the only one with the zero vector in it
ur way works too
oops i didn't see that lol
haha nw i learnt another way to do it too
another way to think of it is that b is the only linear transformation there.
@slow scroll is this possible? because A in echelon form in the question, is there any way that a non-echelon version of that matrix would yield that as a basis for Col A?
i dont think it can
but im not sure
well the third column is a linear combination of the first two, but idk how you are supposed to know that the given set of vectors is a basis for A
well the pivot columns form it
so the first two
@slow scroll , but idk how to find out if a non-echelon version of that matrrix will yield those two matrices for the first two columns...
im not sure tbh
the pivot columns will form a basis of Col(A)

@dusky epoch if you have a diagonalizable operator over a fdvs and its eigenvalues are nonzero, it'll be invertible and admit a basis of eigenvectors, right?
@dusky epoch
yes.

lol
lol
Hi I'm trying to remember a book I read
It was a linear algebra book
For undergraduates
And it was a yellow book
I think
And it had lots of images
how thick was it?
If there is a non-zero vector in the null space, how do I articulate that the columns of the matrix are linearly dependent? I mean in terms of language. Can I simply say "we have a non-zero vector in the null space, therefore the columns of A are linearly dependent" or is there some bridge I need to gap first?
@sage mauve it was a thin book
And extremely easy to understand
It was basically showing how eigenvalues had simple geometric interpretations
For example how translation and scaling work in linear algebra
So like something a college freshman would read
I can't find it but it was my favorite book because I liked looking at the images
do you remember the edition of it?
I think it only had one edition
I read it 6 years ago
It's a small thin book
So not a regular sized textbook
Oof
 the cover was something like this?
the cover was something like this?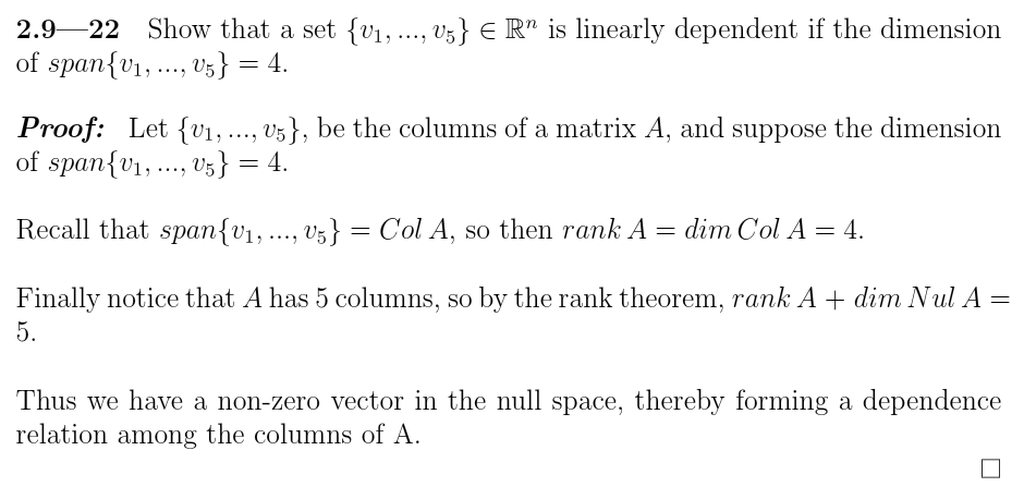
Anybody?
@rocky hill What are you confused about? I'm confused about something too, but I'm curious whether its the same thing.
axler doesnt have lots of pictures doesnt it
is it linear algebra for dummies
i dont know if it has lots of pirctures but it sort of matches the form
oh but its pretty thick
alright geez
It's probably linear algebra a geometric approach
linear algebra: a linear algebraic approach
math a math approach
groundbreaking
math: approaching
limits
what is the difference between gaussian eliminatio nand gauss jordan
<@&286206848099549185>
thanks!!!
@rocky hill
This is late lol but yes that statement is strong
@half ice thanks. Turns out you can also actually use contradiction and then you don't even need to use matrix stuff.
Fair! Glad you got it
LA is the first math since algebra that I'm legitimately uncomfortable with lol
A lot of people are uncomfortable with it, it's a pretty different math for most people. If you understand your above statement, I would say you're doing pretty well!
@half ice I haven't actually learned rank theorem yet, but it seems like rank(A) + nullity(A) = n, since the vectors in the columns of A are vectors in R^n, not R^5?
I was talking about this
If there is a non-zero vector in the null space, how do I articulate that the columns of the matrix are linearly dependent? I mean in terms of language. Can I simply say "we have a non-zero vector in the null space, therefore the columns of A are linearly dependent" or is there some bridge I need to gap first?
@rocky hill
I didn't see the other one lol
Oh. Is there a mistake in that picture though?
No need for "dim Null" as Nullity is already based on a dimension
well Nul is for null space. nullity := dim Null
but it says rank + nullity = 5,
We are in R^n, not R^5
n = 5 here as there's 5 columns
rank + nullity = dimension of the vector space we're in i thought?
nvm i was mistaken
if A is an mxn matrix, then
rank A + Nulllity A = n
I thought it was = m, my bad
Nullity = dim Null
Not redundant but irregular
makes sense i guess, sense rank = # of pivot columns and dim null = #free variables
pivot columns + #free variables = #of columns
I blame wikipedia for confusing me 😩
Oh I have a question. Since the set of all linear maps is a vector space. We can define the inner product of the space, we could then check how much two vectors of linear maps point in the direction of it. We could check something like if integration and differentiation are orthogonal to each other or if they point in the same direction. Would you us Hilbert space or something for that. I am just confused on the approach to it.
"we could then check how much two vectors of linear maps point in the direction of it"
you're gonna have to make a little more sense in this part
oh define the inner product
and check for orthogonality i guess
like projection, but not
be more precise pls
uh that might be difficult
so you just wanna put an inner product on some vector space on linear maps and then just evaluate it and see what happens?
i want to define the inner product on the vector space of all linear maps
like ok, suppose you have an inner product on some function space, so what
and then see what happens
and then what
so yeah
what did you want to happen
i don't know
linear
algebra
Yes my child.
it's pretty cut and dry
I'm going to algebra 1 next year, and it has more than 200 endings now.
@flint sandal so might not be obvious but this doesn't always work
at least not in any interesting way
oh
i was just wondering how you would define the inner product on something like that
on L(V,W)?
yeah
so umm, try working with square matrices first
🦋
but that is when i got confused
do know any analysis
if V and W are finite dimensional and you pick a basis for each there are some naturalish inner products on the matrix representations
you can endow L² spaces
i don't think in general there are cool inner products if V or W or both are themselves inner product spaces
I thought this channel was like highschool algebra 1 or 2. The name is deceiving.
it's literally linear algebra
linear algebra is a standard first year college/university subject
ah ok
if you want to talk hs algebra that's probably #prealg-and-algebra
Makes sense
so it would not be cool then
i was just thinking that checking if integration and differentiation were orthogonal was cool
if you can put an inner product on a function space that has integration and differentiation type linear operators in it then you can try to ask but i can't really think of a natural way to do that
yeah that was the problem
and i wanted to see a generalized inner product on all linear maps
but that made no sense to me
well remember you can't even just say "all linear maps", you need a domain and a codomain
otherwise it's not even linear
what would adding a 5x3 matrix to a 6x24 matrix look like
it makes no sense
like, L(V,W) (= the linear maps V -> W) has a natural vector space structure inherited from the vector space structure on W
f+g would be the linear map such that (f+g)(v) = f(v) + g(v), and kf would be the one where (kf)(v) = k*f(v)
oh i am starting to see
no real way to transport an inner product off of W though
at least i can't think of one
thanks for the help
thanks for a question that isn't a homework question 👍
oh i have anouther one
it is a less of a question though
and isn't fully thought out yet
i was wondering about the parallels between convex hulls and orbits. the center point and the centralizer are similar but tell different things and are for different data
those have no relation
oh. so there is never any relation, except they kinda look similar
i guess
well they do massively different things
and are for different types of data
i just thought they kinda looked similiar when they are finding the center and wondered if there was anything more behind it
but nope
thanks
sorry for the stupid questions i wished they taught more of it in school
@balmy bough The standard basis in M31 is the standard basis for the 3x1 matrix
is it just me or is this a stupid question bc the answer will be just X itself
maybe X isn't given relative to the standard basis in M31
,w 2x +4y=15
Hey does anyone have a good video that explains the process of finding the determinate of a 4x4 matrix
And one that explains how to find one of a 5x5
you really don’t wanna be doing that by hand, the caculations get really long really fast
unless there’s a lot of 0s
Gotta learn it for my test
but the procedure is pretty easily explained, one sec
Kk
Sascha Baer:
this just for later
so, let’s say you have your 4x4 matrix (this’ll work exactly the same way for 5x5)
pick a row or column which has a lot of 0s
the more the better
and then you have to go along that row or column and calculate particular 3x3 determinants
let’s say you pick the first column
you would start at the top left
in your mind, remove first row and first column from the matrix
(the row and column containing the top left cell)
you’re left with a 3x3 matrix, right?
So you do this each time
you now have to compute the determinant of that, and multiply it by the number in the top left
then, since there’s a + in the top left, you add that
now you go to the next number
remove that row&column from the 4x4 matrix, calculate the determinant, multiply it with that number, and now subtract
So it’s kinda like a bunch of tiny 3x3 matrixes
yea, four of them
you can go along any row or column, but you have to pay attention to the signs
What are the tricks for 5 x 5
I know if A row repeats the determinate is 0?
Or something like that?
well, the brute force way would be to do it again like 4x4, but at this point you probably ahve to be clever
do you know gaussian elimination?
I do
good. gaussian elimination changes the determinant in predictable ways
specifically
any time you swap two rows, it gets multiplied by (-1), every time you multiply a row by some number λ, so does the determinant. if you add a mutliple of a row to another row, that doesn’t change the determinant at all
I’ll make an example afterwards of what I mean
now, the trick is this:
if you get your matrix to upper triangular form
then the determinant of that matrix is just the product of the numbers on the diagonal
and then, if you kept track of how you manipulated it, you can “undo” those changes to the determinant
for 5x5, this will definitely be quicker, even for 4x4 it probably is
again, unless there’s a lot of 0s
so, example time
(give me a moment, I’m drawing sth up)
Alrightyyyy
this is a 3x3 example cause like, effort, but it should show what I mean
so first, I do elimination to get it to upper triangular
then I can read the determinant of that by just multiplying the diagonal entries
then I go back
where I addedisubtracted rows to each other, I don’t change anything
but where I multiplied by some number, I now have to divide by that
and if I swapped two rows I’d have to do *(-1)
this is probably the most efficient way to do it in any even remotely large example
(there’s of course a reason why this works)
(it’s basically to do with how the determinant of the product of two matrices is the product of the determinants, you can represent each elementary row operation by a matrix multiplication if you so please; the things you’re doing here are just dividing out by those determinants again)
and yes, there’s some more trick
if you can tell that one of the following cases are true, then the determinant will be 0:
-one row/column is all 0s
-one row/column is a multiple of another one (including two rows/columns being the same, which is a multiple of 1)
-one row/column is the sum of (multiples of) other ones
Alrighty thanks a lot!
Imma try this method out!
Seems like it’s wayyy more realistic to do this in a test situation with limited time
Than just brute force
Let $V = M_n(F), A \in M_n(F), T \in \End V$ such that $T(B) = AB$. Prove
$q_A = q_T$. \
%%%%%%%%%%%%%%%
Let $L_A: M_n(F) \to \End M_n(F), B \mapsto AB$ be the action on $\End V$ by left multiplication and fix $A$. For
$q_A(t) = \sum \beta_k t^k$. $L_A$ is linear and $L_A^k(B) = A^k B$, thus for all $B \in V$ we have
[(eval_{L_A} q_A)(B) =
\Bigg(\sum \beta_k (L_A)^k \Bigg) B =
\Bigg(\sum \beta_k A^k \Bigg) B = 0(B) =0
]
Therefore $(q_{L_A}) \subset (q_A)$.
In the other direction, let $q_{L_A}(t) = \sum \alpha_k t^k$.
Then for all $C \in M_n(F), \Bigg(eval_{L_A} q_{L_A}\Bigg)(C) = 0(C) = 0$. Thus $(q_{L_A}) \supset (q_A)$. \
$k[t]$ is PID and minimal polynomials are monic, therefore
$$q_{L_A}=q_A$$
flimflam:
what's q_...?
minimal poly
I have no idea what that is
annihilates T
it's the largest ideal which does so
that is q_T(T) = 0, and for g(T) = 0, g ∈ (q_T)
get it together mniip 
not...really
since vector spaces don't have multiplication
but M_n does
Not as a vector space
so q_A and q_T are polynomials, but what meaning do you give to
$(q_{L_A}) \subset (q_A) $?
Tuong:
q_A,q_T=q_{L_A} are polynomials in k[t]
so those are the ideals generated by respective poly
Ah, ideals
well
basically the polys should just be equal
feel as though I skipped/missed a step at umm
Then for all $C \in M_n(F), \Bigg(eval_{L_A} q_{L_A}\Bigg)(C) = 0(C) = 0$.
Thus $(q_{L_A}) \supset (q_A)$.
flimflam:
like maybe I should say
$eval_{L_A(C)}(q_{L_A})= ...$?
flimflam:
Mhmm, are $\sum\beta_k(L_A) ^k$ and $\sum\beta_k A^k$ supposed to be equal?
Tuong:
ya
But the first one is an application of M_n to End M_n, and the other is an element of M_n
They don't have the same type
umm
well properly the evaluation at B is equal to multiplying on the left by stuff
there's a B on the left
right
right

if I follow your notations correctly, \ \
$\left(\sum\beta_k(L_A)^k\right)B\in\End M_n(F)$\
$\left(\sum\beta_k A^k\right)B\in M_n(F)$
Tuong:
top should be (B) that is you should get a matrix back
oops
my bad
fixed
this is sorta messy sorry
but top would still be the image of B by the application sum of the β_k(L_A)^k
which is an element of End M_n
that's just an endomorphism of M_n(F) tho
so if you evaluate at B in M_n(F), you get an element in M_n(F)
$\left(\sum\beta_k(L_A)^k\right)$ is a an application of $M_n(F)\to\End M_n(F)$
Tuong:
so when you evaluate at B, you get an element of End M_n(F), right?
L_A is in End M_n(F)
Ran A = column space of A
can someone explain the step I circled, It looks like A^T just gets factored out of the column space or something lol?
EA 
having trouble here, they all seem false to me?
for c, doesn't Nul A need tobe = 0 according to the invertible matrix theorem
it isnt
ok then lol
nono remember rank + nullity = rows
No, for answer choice b: 2+0 does not equal 3
and for answer choice c , 4+1 does not equal 4
um rows x columns
oh wait yea oops
i had it mixed up yesterday to. I incorrectly corrected my correction from yesterday 🤦
haha good 😄
@slow scroll is there a nxn matrix where ColA would equal Nul A?
no right?
an nxn zero matrix would
oh yeah.. makes sense!
im not sure if there is anything less trivial tho
i think that would be the only one
yea i think so too.
@slow scroll srry mate, one more question: Can u explain why or why not this is true...
im pretty sure its true. They are linearly independent (not linear combinations of each other) and they have to span H because H is a 2D space. i.e. if they didn't span H, then there exists at least one vector that can be added to the basis, making it a >2d space @placid oracle
there is probably some better way to explain it though 
ok so because theyre linearly independent, thery have to form a basis of a 2d subspace they lie in
yea
got it! ty
np
Hi everyone!!
good to be here!
anyone here who is learning PCA?
I'd love to team up and learn/practice together!!
what book you using?@frank warren
for PCA
I used D.C Lay, i have all worked out exercises
if yo can read my scribbles))
have you started with linear algebra? excuse the question if you have
let me find my notes, i scanned them in
some time ago, better pdf files then paper
My initial thought for b is just 12000 - 12000/1.5 but I'm not sure why they asked to find the eigenvector in that case
<@&286206848099549185>

 .
.{kind=link}
Why is this in linear algebra??
Don't ping helpers before 15 mins dummy
ahh sorry 😭
I don't know, this was given to me in lin algebra class 🤔
so i assumed this was lin algebra
Did you even type what you meant to
That sum is equivalent to 1/2+3/16+1/8...=1, which seems sketch
If it's linear algebra then, I suppose you have to do it through orthonomal total families of vectors and parseval?
Oh I see
this was the example given that has fibbonacci sequence at top instead
what do you mean by sketch?
if it's not linear algebra, I apologize, please redirect me 😭 🙏
That "add, matching like denominators" step, you can't do that until you've proven summability
summability?
convergence
you want to sum by grouping terms together
how would I do that?
that's what the "proof" is doing
anyway, #calculus or any question channel is a better place for this
I'll move to there then thank you
can someone explain what it means for columns to span Rn?
S{α1,.......,αn}
ignore what i said im dumb.