#point-set-topology
1 messages · Page 285 of 1
regarding the difference between homotopy and homotopy equivalence, as far as I can tell the two interact on different objects, homotopy on functions/maps and homotopy equivalcence on spaces, that is correct?
and spaces that are homotopy equivalent have maps between them, where the maps satisfy the fact that the composition of them is homotopic to the identity on their spaces?
that is the part which confuses me somewhat
yes
yes
the idea should be that it looks almost like the definition of isomorphism
except the compositions only hold "up to homotopy"
perhaps, if you don't mind, i explain my understanding of how we reach the concept of homotopy equivalence
So firstly we start with a path, which can also be thought of as a map from the unit interval
That is not a homotopy
The deformation of these maps from one map to another is what we call the homotopy, correct?
lmao what a coincidence, I was literally just reading about vertical and horizontal compositions of natural transformations and came in to topology to check whats up, and I see this
In essence, a homotopy is a map on maps, from a map from the unit interval to another map from the unit interval
Then this is where I start to get lost, I do not see how we get from homotopies to homotopy equivalences
A path is a homotopy between constant maps if you'd like to think of it that way
(And any homotopy is a path within a space of functions but thats a bit advanced)
This i am not sure I understand
There are two most common ways to define a homotopy, and they are equivalent
One is that a homotop between $f,g:X\to Y$ is a map $H:X\times [0,1]\to Y$ such that $H(x,0)=f(x)$ $H(x,1)=g(x)$
Say we have maps $\alpha(t)$ and $\beta(t)$ which trace out two different paths from a to b, a homotopy can be visualized as a deformation from $\alpha$ to $\beta$


The other is that you have a family of functions $f_t$ such that $f_0=f$ and $f_1=g$
MaxJ

and they have to have some additional continuity relationship
I've seen both of these, and the former is what was introduced in this course
So I think I am alright with homotopies
a homotopy between alpha and beta can be seen this way, although homotopies need not be between paths
one can think of a homotopy betwen f and g as a way of continuously deforming one to get the other
homotopies can in particular be reversed
Yes, due to its property of being continuous
This is the definition of homotopy equivalence I have been given

this is the normal one
if you replace $\simeq$ with $=$ you get the definition of an isomorphism
MaxJ

So I suppose, when they say $h:gf \simeq 1_X$, this means that the composition $gf$ can be continuously deformed into the identity map?
wOne

yes
How do you visualize it though, I can visualize homotopies but not so much homotopy equivalences
For example, I get that $D^n$ and ${0}$ are homotopy equivalent, and I can see how to compress $D^n$ into ${0}$, but I cannot see the inverse
wOne

You can picture it as continuously deforming one space into another
"seeing" the inverse is hard in a sense because you have to turn 1 point into countably many
but its just someething you get used to
Yes, the issue sort of comes with dealing with that
Then for example, there's some notion of preserving holes, which I do not fully get
For example we cannot deform $S^1$ into ${0}$, I believe, but I do not fully get why
wOne

Yeah, I think this is a standard issue for people just learning this stuff
there is a tendency to view S^1 living inside of R^2
where obviously one can shrink S^1 to a point
this is not saying that S^1 is equivalent to a point
instead it is saying that any map $S^1\to R^2$ is equivalent to any map $point\to R^2$
MaxJ

I see, I guess my notion of the ambient S^1 space can use some reworking
one way to fix this intuition (although maybe imperfect) is to force yourself to perform the homotopy inside of S^1
If you do this, it is not hard to see that shrinking S^1 to a point while staying inside of the original S^1 forces you to "tear" open the circle
this explicitly says there is no homotopy between the identity on S^1 and the inclusion of a point into S^1
Okay, I can see that
which conforms to the definition
right, I think I get the difference now
If you don't mind, I'll ask you a bit more about the homotopy equivalence being an equivalence relation problem I had earlier
sure
Not so much a problem, as making the homotopies explicit, which, if not required, at least will give me a better understanding
I might go to my office soon though, in case i stop responding for a second
There's no worries, I'll be here a while more
So firstly, I would like to confirm that I can't get more explicit than talking about the maps between the spaces, and the functions that map between these spaces
And sorry that that's a very general question
Formally a homotopy is the existence of a map H as you and I discussed above
What I mean to say is that, using the ideas of maps between the spaces and the homotopies between the composition of these maps and the identity maps, I can improve on the explanations I have given
If you construct such an H and check that it satisfies the requirements you are done
But yes
You can “improve” them
I write quotations bc no practicing topologist would really include these details, it is more about proving to your grader or yourself that you understand them
Could you give an example of a detail?
I’ll need to drive first to type it out. If you want to try on your own, try showing that if given homotopies between all the relevant maps in the transitivity proof, you can construct homotopies for X\simeq Z
ie given the necessary homotopies for X\simeq Y and Y\simeq Z, build one for the final equivalence
I'll take a shot at it and update here
w.r.t the symmetry and reflexivity proofs, is there much that can be improved?
No, you asset it
Assert
You assert that gf=1X implies gf\simeq 1X
This is obvious
But worth proving if you can’t see how immediately
how would that help for transitivity?
My intuition says via the "constant" homotopy, if that's a term
Yep
That’s it
As for transitivity again you assert you can build a new homotopy
You don’t actually do it
Ah
You’re not wrong, it is possible
Say we show $X \simeq Y$ and $Y \simeq Z$ implies $X \simeq Z$, then we can just compose the composition of functions $X \to Y$ and $Y \to Z$ with $Z \to Y$ and $Y \to X$, that is homotopy equivalent to $1_X$ right?
wOne

And we can do the reverse to get the other necessary homotopy
i mean again
this does not construct a homotopy
by construct a homotopy I mean build a map $H:X\times I \to X$ such that $H(x,1)=1_X(x)=x$ and $H(x,0)$ is the composition $X\to Y\to Z\to Y \to X$
MaxJ

(and the same thing for Z, but this is not hard if you do the first one)
Is this sort of the idea?

Sounds like it isn't
Well, i'd need to know what f,j,k,g are
I realized it should go -3, -2, -1 instead of -1, -2, -3, but yeah
but I expect not
From the bottom of the page here
You can tell that this does not work on type alone
Sorry, I can't really think of a middle ground between the images I shared and this
like
none of these maps are maps X->X
so a piecewise combination can't give you a map X->X
Ah, that was one question I had as well but I guess that's just been answered
Right, so the idea doesn't hold water since none of the maps go from X to X
Yeah
One thing that might be easier
prove the following lemma:
Actually sorry this is conceptually related but not good enough
Yeah this is just kind of messy lol
Sorry this might be tangentially important but I have a hint that the answer to this question is long
how long long is was not given

Given any composition $f_1\circ ... \circ f_k...\circ f_n$ and given a homotopy $H_1$ between $f_k$ and $g$, there is another homotopy $H_2$ between $f_1\circ ... \circ f_k...\circ f_n$ and $f_1\circ ... \circ g...\circ f_n
MaxJ
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

basically we can in a series of composition replace swap out individually homotopic maps to get a homotopic composition
(briefly, composition is well defined up to homotopy)
Then one can use this lemma to prove the desired homotopies exist
the easiest way to do this is with transivitiy
Depends on your point of view I guess
you can set k=2 and n=3
if you want to do it more simply
This lemma hasn't been introduced in the course yet, though I don't think it's an issue using it
I was intending you to prove it haha
Basically, constructing an explicit homotopy for my lemma is easy
and then using transivity you get a homotopy for the actual fact you want to prove
Sorry, isn't the goal to prove transitivity?
Ah
i.e. $f\simeq g \simeq h$ implies $f\simeq h$
MaxJ

Okay let me see if I understand
So we just want to use the fact that homotopies are transitive to prove this lemma, and from this lemma we somehow get that homotopy equivalence has the property of transitivity?
Other way around
prove the lemma and then use transivity of maps to conclude
Maybe I can sketch this last part to motivate it
Take $X\to Y \to Z\to Y \to X$
MaxJ

the map $Y\to Z\to Y$ is homotopic to $1_Y$. Using my lemma, I can replace it with $1_Y$ then, which I will omit because it does nothing
MaxJ

This leaves us with $X\to Y \to X$
MaxJ

this is homotopic to $1_X$
MaxJ

via transivity I get $X\to Y\to Z\to Y \to X\simeq X\to Y \to X\simeq 1_X$ as desired
MaxJ

So I would recommend two options
- prove my lemma
- prove exactly the homotopy equivalence above
they are basically the same proof, but one might be easier to wrap your head around (and if you do the easier option, I'd recommend coming back when you have time to the original)

Same issue
H_2(x,t) is a map Z->Z
I am going to go ahead and conjecture that there is no way to prove this using a piecewise function
Hmmm
The issue is that piecewise functions correspond to the wrong type of homotopy composition
i.e. its vertical
you need to horizontally compose
which is in essence my lemma
The idea was to show that this was homotopic to 1_Z, the 1_X homotopy would come by reversing the relevant parts
You cannot find a homopy living in Z and in X with the same functions
I think you are getting close to option (2) above
Yeah, this has been quite a lot of effort I put in haha
I think it would be a good warm up to define a homotopy for the following
Very tempting to give up since the assignment is 1% but I'm so close I don't wanna give up
If $f:X\to Y$ is homtoopy to $f':X\to Y$ and if $g:Y\to Z$ is homotopic to $g':Y\to Z$ via homotopies $H_1,H_2$, prove that $gf\simeq g'f'$
MaxJ

by constructing an explicit third $H_3:X\times I\to Z$
MaxJ

The actual definition of $H_3$ is simple and does not involve a piecewise function
MaxJ

But figuring out what it should be might take some thinking
I think this confusion you are having is pretty fundamental and will come back to haunt you if you give up
I think so too, that's part of the reason why I'm not stopping yet
I've been bitten by bad fundamentals enough to know how important they are
this is horizontal composition again, yes?
But I think they can be both deformed simultaneously since they have common point at y
The dumbest thing I can think of is H = H1 + H2
well
I think that is too dumb
- might be the wrong symbol
since I don't know how you would define addition on homotopies
since it doesnt mean anything lol
yeah lol
Oh, H = H1 circ H2?
composing the homotopies
yeah
hahahaha
Maybe H2\circ H1 if we want to be techncial
Ah, I see why that would work
Essentially you first deform f, and then you deform g, is that correct?
Or is that some notion which I am clinging to which doesnt make much sense here
That would be very greatly appreciated lol
I have to draw it one second

Okay
so
here's how we read this diagram
the entire dashed middle line represents Y
On each edge we have one of our starting functions
and the insides consist of all the intermediate functions induced by H_1 and H_2
So the easiest ways to get from X to Z in this square
are the edges
these are gf and g'f' respectively
Alright, i follow so far
I can also start at gf and use H_1 to get to gf'
Because the dashed line is all the same thing
(you could think of it as 1_Y if you want)
Basically, we have a homotopy $gf\simeq gf'$ given by $g\circ H_1$
MaxJ

I can get these "one at a time" homotopies for each choice, g,f,g',f'
By choosing the right homotopy H_1,H_2, or doing them in reverse
AH
The other thing i can do is I can start at the outer edge
and go all the way to the other edge
using both at the same time
I understand the function composition symbol with homotopies now
Or how a function can be composed with a homotopy
Yeah its actually a bit of an abuse of notation
$H_2\circ H_1$ technically is not a legit composition (check the domains and codomains)
MaxJ

but what I can do is define
$H_3(x,t)=H_2(H_1(x,t),t)$. This is readily seen to be continuous and satisfies $H_3(x,0)=H_2(H_1(x,0),0)=H_2(f(x),0)=g(f(x))$
MaxJ

and likewise for $t=1$ we get $g'f'$
MaxJ

I think that when first learning this stuff
its very easy to get lost in the symbology
and lose sight of the "geometry"
I definitely try to fit answers to known formulas a bit more than I should
Yeah, I think its normal to do that
Something something can't see the forest for the trees
Is Davis a strong school for topology ?
I think textbooks don't always do a great job of explaining why like
these formulas are what they are
Definitely am spending more time figuring out why the formulas are the way they are than say in analysis or algebra
like the people who invented them did not pluck them out of thin air, but they did what we just did, which is figure out morally what should be going on
and then derive a formula from that intuition
I am not familiar with any of their professors but that doesn't mean much, I am in a niche subfield
Okay, I see how H3(x, t) = H2(H1(x, t), t) satisfies the first problem you gave me
How do I extend this further to help with my solution?
And as an aside, I think one problem in topology is that there aren't many problem sets for me to practice on, I really believe math isn't a spectator sport.
Use horizontal composition to prove that $X\to Y\to Z\to Y\to X$ is homotopic to $X\to Y\to X$
MaxJ

Do you know what schools are known for their work in Topological combinatorics?
hatcher has a lot of exercises
I know literally 0 about topological combinatorics, sorry
I am considering the following:
$H(x, t): \begin{cases} 1_Y & t = 0 \ jk & t = 1 \end{cases}$
wOne

Does this make sense?
It is not the final homotopy, just one step which I may want to use
Ah sorry, real life calls 😦 I will be back in a few hours, I can tag you when I return if you want
If not, thank you for all the help you've given
feel free to tag me
this however is not a function
i am going to ban you from using piecewise notation for the forseeable future
Hello, I am back 🙂 But I only have an hour or so before I should go to bed
Yes sir
@marsh forge I think I am too sleepy for much more work tonight. I will think about it more in the morning. But thank you for your help so far 🙂 If you are around then I would be grateful for your help!
H_0 of a point is Z
geometically, i don't understand why the orientation of 0-mfd(points) have two
i think it is just a points
I don't know if it has a real geometric interpretation
but its straightforward from the definition
the idea should be that like, orientations are sort of like a globally consistent choice of local spirals
i.e. like, i zoom into my manifold and choose either clockwise or counterclockwise and then propagate that around the manifold in a consistent way
for a point, an orientation is literally then a choice of clockwise or counterclockwise
i.e. 2 orientations
Maybe my point here is that if you believe that normal orientable manifolds have two choices, it is entirely consistent to give the point 2 choices
because its the same geometric idea
i see. thx
it's required to extend stokes theorem to imply the fundamental theorem of calculus
Why are orientations described so abstractly in algebraic topology to be a function that chooses generators of homology groups, but it is stated more concretely in diff-top.
maybe a good comment to add is you use different definitions when you want to different things
concrete definitions can be good when you want to work with concrete things and do calculations
abstract definitions cab be good when you want to work abstractly and prove that such and such follows
the diff geom definition is nice because if you assume you are working with oriented manifolds then you know you have a no where vanishing top form
and you can maybe use this form to construct some bundle
the algebraic topology definition is nice because you can check if a manifold is orientable or not by looking at homology groups
everything ive said is very much a subset of what nobody said above
but sometimes it can be useful to spell out this stuff
How does this work: "In the discrete topology on $S$ any set $A \subset S$ is both open and closed."
criver

Or "${p}$ is an open set"
criver

the discrete topology has the powerset of your base set as topology
so all subsets of your base set and all complements of said subsets are open
because every possible subset is open
making every point an open set and also closed
so it's by definition? I haven't studied topology before and I started reading Mardsen
It's the topology such that all subsets of your base set are open
I guess I was just used to the notion of open/closed from analysis. But here it seems to be wrt what we decide to be in the topology
This topology is quite different from the natural one on R
R with its natural one is second countable for example
while the discrete topology over an uncountable set isn't
Here's a nice definition of discrete topology "the discrete topology is the unique topology on a space so that every function out of the space is continuous"
So if a set is in the topology -> open, if the complement of a set is in the topology -> closed. Ok, got it.
Why does the author distinguish between the $U_1, U_2 \in \mathcal{O} \implies U_1\cap U_2 \in \mathcal{O}$, and "the union of any collection of open sets is open"? Is the point that the latter can be an infinite collection, while the former isn't?
criver

Basically what would be the difference with writing $U_1, U_2 \in\mathcal{O} \implies U_1 \cup U_2 \in \mathcal{O}$ instead of the former formulation
criver

Specifically regarding the any collection part
arbitrary unions are contained and finite intersections
If I have a very specific surface, like, say, y^2=x^6+t^11-t, and I want to write down its canonical divisor explicitly (that is, as a sum of curves on the surface that I can write down) is there a way to do that? [I will take any canonical divisor, thoguh the nicer the better of course]
What’s a good resource to look up to regarding a complex analytic proof of the fundamental group of S^1 is Z?
I don’t know if this should go under as alg top question or a complex analysis question lol
this is covered in any complex analysis textbook
you just have to rephrase the language
I think, btw, this question is actually easy to do "by hand" if you just start with your favorite two form, e.g. dx dy and chase it around an affine cover of your surface. I just eneded a shower to realize I was way overthinking this.
Hello

Consider (0.9 , 1.1) in [0,2]. Its the preimage is (0.9 , 1) U [1.9 , 2)
Notice the preimage isn't open. Thus f is not continuous
So I asked this question in one of the help rooms and I was redirected here, please let me know if this is the incorrect channel
How do I compute the fundamental group of this space (Cylindrical surface with two bases, a sempisphere and a segment)? I only have Seifert - Van Kampen and homotopy invariance as tools I can use.
So far I've proved that removing the point of intersection between the semisphere and the segment gives me something that retracts onto the cylinder with the two bases, which should be simply connected, but I haven't been able to find another open set such that the intersection is path connected.
I'm using Van Kampen because I need to find the generators explicitly.

the disks on the top and on the bottom
the disks are just disks
what do the "bases" do
normally i'd assume you meant basis sets for a topology if you said a base for a space
By "bases" I meant D2 x {1} and D2 x {-1} if the cylinder is S1 x [-1,1], my translation was probably wrong
Where D2 is the unit disk
You could remove each base
To get a good open cover
Wait is it (S¹ × I) ∪ (D² × {0, 1}) ∪ that line and surface of a hemisphere?
Yes
Then remove the hemisphere for 1
And D² × {0} for them other open set
Ah intersection still not path connected
that's my problem
Then just do what you did and take the other open set to be an open band that connects the 2 end points of the line lol
how is the intersection path connected then?
how do I connect the points on the line with the rest of the cylinder if D2 x {0} isn't there?
It's a band - a point
It is
I thought you were removing 1 end point of the line
Oh so I take the lower disk right?
I removed the "upper" end point
the one that intersects with the hemisphere
Yes
wait so it's just simply connected?
Doesn't the band give you a ℤ
It's the pushout of
0 → ℤ
↓
0
Which is ℤ
You could also view this as a wedge of a sphere and a donut with the middle hole collapsed
Then it makes sense that this is ℤ
I'm probably missing something, how doesn't the band just retract onto the disk?
A band is like a circle
Like you go along the line, then to any point on the circle at the top, then straight down, then to the bottom end of the line
like this?

I see how this loop is non trivial, but I don't see how I can go through the top, I probably misunderstood what you meant by band I'm sorry
I was just describing the set
Take U = complement of the top end point of the line
V = this circle but wider so that it's open
Then apply svk
I'm sorry I don't understand what you chose as V
The line that you drew
Try applying svk to this first
The line isn't open
But for now just pretend that it is
I mean loop not line
@gritty widget
And see what you get from svk
Then to fix this
Just take a neighborhood of that loop that deformation retracts to it
oh that makes things so much easier
So I can just take any open subset that's homotopy equivalent to the loop as my second svk set?
(assuming everything is path connected)
- How would you define uniform continuity in terms of balls for metric spaces?
- f is continuous iff the preimage of any open set is also open. Is there some analogous statement for uniform continuity?
- For metric spaces, you don't need to do anything other than take the definition for reals and replace all the |a-b|<c with d(a,b)<c or equivalently b in B_c(a).
It's a bit of a vsgue statement but I think no to (2). Uniform continuity cannot be described with topological data. You can change the metric so that it generates the same topology but has a different uniform structure and different functions are uniformly continous.
I have an algebraic topology question. Is there a nice description of the fundamental group of $E_n := { x \in \mathbb{C}^n | \forall k,m \colon k \neq m \implies x_k \neq x_m }$ (i.e. no duplicate coordinates)? For n = 1 and 2 it is easy but I have no idea how to generalize. Idially the description would have something to do with the symmetric group $S_n$, as I want to next consider this as the covering space of $E_n/S_n$.
M8732

This is quite ugly but I think you can think of E_n as C^n quotiented out by the subgroup G of S^n generated by transpositions. Unfortunately this action is faithful but not free so you need to do a lot of leg work to get a description of pi_1(E_n) out of it but there are a few papers giving such conditions if you have the time https://sciendo.com/pdf/10.1515/awutm-2015-0015
If this is for some random class you probably dont need to take this approach though : P kind of assuming thi sis a personal project

Braid groups...
Oh i totally forgot about those, nvm there are lots of results about configuration spaces already
Probably shouldnt have pointedly ignored all the examples and exercises involving them but oh well 
Thanks guys, I will check it out.
This is for a personal side project.
I am hoping it to be useful for another proof.
is it true that the entire space, say X, is open w.r.t any topology on X?
i know this is true in metric spaces but i wana make sure
yes, this is true by definition
alright thanks, i thought it was axiomatic but googling kept giving me metric spaces
"Let $X$ be a topological space. Assume $Y \subset X$ with the subspace topology. Prove or disprove: if $U$ is open in $Y$, then $U$ is open in $X$."
i was using this for a counter example
Dpao

ah okay
making Y=[0,1] and X just R with the standard topology
ye that works
Prove that $\mathcal{R}={(a,b) \times (c,d): a,b,c,d \in \mathbb Q}$ is a basis for $\mathbb R^2$ with the standard topology.
for this one, I figure i show open intervals with rational endpoints is a basis first, then that its topologically equiv to the standard basis, then extend to R2
Dpao

something like using the product topology on that basis for R? not sure exactly how id finish it off
do you know that {(a,b) x (c,d) : a,b,c,d in \mathbb R} generates the standard topology on R2?
I'm almost sure we can take this as a given
cause we used it in class
are you sure you aren't thinking of {U x V : U, V are open in R}, the usual basis for the product topology on R2?
lemmie check my notes
honestly thats not necessary
just show that for each point x in an open set in R2, you can find an element of fancy R containing x contained inside the open set.
That way every open set is a union of elements of fancy R
ah i see, how about the part for showing the topology it generates is equiv to the toplogy generated by that basis u gave
the basis for the standard topology
all you have to do is show that every open set in the standard topology is a union of elements of fancy R.
More formally, this shows that the topology generated by fancy R is finer than the standard topology. But since each element of fancy R is open in the standard topology, the topology generated by fancy R is at most as fine as the standard topology
this is just the general procedure for showing that a subset of any topology is a basis
if "standard topology on R2" means topology generated by open balls for example, then take an open set U and a point x in U. The goal is to find a rectangle of the form (a,b) x (c,d) for rational a,b,c,d containing x which fits inside U.
Well, there is an epsilon ball containing x contained inside U. So it would suffice to find a rectangle containing x contained inside the epsilon-ball.
interesting way to look at it
we really didnt cover much in this class
- You can define it in terms of so called uniform covers. A cover of a metric space is uniform if there exists a Lebesgue number for it. So all you have to do is take the canonical uniform cover U_r = {B(x, r) : x in X}. Uniform continuity can be described using uniform covers and it is so in the following way. A function f:X to Y is uniformly continuous if for any uniform cover U of Y there is uniform cover V of X such that the family f(V) = {f(A) : A in V} is sort of a "refinement" of U, in the way that each element of f(V) is contained in some element of U. The previous uniform covers U_r form a base for the uniform structure of a metric space X.
- Yes. A function f:X to Y is uniformly contonuous iff for any uniform covering U of Y, f^-1(U) = {f^-1(A) : A in U} is a uniform covering.
Open balls aren't a topological data
Open balls would hurt a lot
Anyway, point is there is lots of analogies between continuity and uniform continuity if you know where and how to look at it
The general setting is of so called uniform spaces. Those can be defined in terms of uniform covers for arbitrary completely regular topological space (classicaly in terms of entourages). Sadly it's not a very active field of study.
thanks!
Hello fellas
So, I came across several ways to prove continuity in topology. Which method do you use? I.E. is the standard way to do
depends on the situation but almost always either sequential continuity or preimages of closed/open sets
oh, I don't know about the sequential continuity?
I'm sure you have, it's just that lim f(x_n) = f(x) for every convergent sequence
(passing the limit through the function)
oh ok I did indeed
The ones I've been using are the preimages and proving that each point in the domain is continuous. But my favourite is the former
it is usually the most useful
nice, thanks
usual method is to use gluing lemma to functions which are known to be continuous
there's also theorems for quotient maps etc.
I try to avoid showing continuity directly whenever possible
My favorite way to prove continuity is to intuit
just calculate the probability of your function being continuous
gluing lemma is a nice name for it xd
Keep in mind that this only works for nice enough topological spaces, like first countable spaces
It is also often possible to spot that a function is a composite of 2 functions for which continuity is easier to check
Like when you have a circle and a function on it to itself which is not surjective, it is homotopic to a constant map. A homotopy here is to take the shortest path from f(x) to a fixed map for each x and walk along it
You can prove that this is continuous by connecting f(x) and that fixed point by a straight line in R^2 - 0 and then use a retraction onto the circle to get a homotopy on the circle
Might be too specific an example but I like it a lot and have used similar tricks for other random functions
Other than that, by this I mean, if you are checking continuity of a map out of a quotient space, you check continuity of that (precomposed with the quotient map) on the original space and that is enough. Similarly a function into a product is continuous iff all of its coordinate functions are continuous
Yeah, I meant this when I said "theorems for quotient maps". Composition is a good way to check continuity too, I agree
Oh I did not see your message
a reason to stay away from the box topology!

Yes obviously. He was talking about open sets though. They aren't.
cw: munkres hell proof
Box topology is the counterexample topology 😌
they were talking about analogy to continuity defined as with preimages of open sets to be open
that's how I understood it
well, that's what they wrote actually
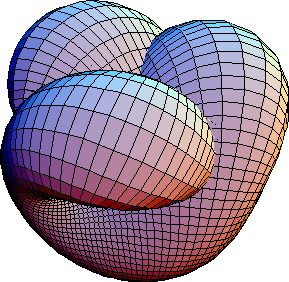
Can someone help me check my solution? I need to compute the fundamental group of a sphere inscribed in a cube.
I removed the north and south pole one at a time to get my open sets U, V to apply SvK.
U and V should both be homotopy equivalent to the wedge product of S2 and S1, so their fundamental group is free on one generator (in blue and green in the picture).
The intersection should retract onto S1 inscribed in a square, whose fundamental group should be free on five generators (to prove this I removed the opposing vertices of the square to get U', V' which should be homotopy equivalent to S1 v S1 v S1, while the intersection should be homotopy equivalent to S1).
The relations I get from the intersection are that the blue and green loop are homotopy equivalent, so the fundamental group of the whole space is free on one generator.
Is this correct? (I can show more of my work but this message is already long and I didn't want to flood the chat with more pictures)

hm wouldnt the fundamental group of the intersection be that of S1? since you may "embiggen" the missing points at the poles so that you are left with a cylinder inscribed within the cube without either of its ends. and thus when "flattened" youre left with a square with a disc cut out, i.e. S1?
@gritty widget
By embiggening the missing poles shouldn't I also retract the interior of the top and bottom square onto their respective boundary?
well if you did that would you not end up with a cube where the top and bottom faces are gone?
and I can retract the hemispheres with the missing points onto the equator
mm
shouldn't I get something like this by "flattening" the cube without the top and bottom faces?

(viewed in the xy plane from above, it should be slanted to be coherent with my original drawing)
you are probably right.

my argument is this
in 2 dimensions
whoops i see my mistake. i was envisioning the space embedded in R^3
what space?
the original space. it's nothing'
i think i would be right if the cube were filled in, say the space were S^2 union [0, 1]^3
right, if the cube was filled in I would agree with you that the intersection is equivalent to S1 but my cube has no interior
Does anyone know what is meant by this
Consider a fiber sequence of spectra K to X to Y
this fiber sequence is classified by a map u: Y to the suspension of K
Classified is an interesting word
I mean, you get such a map Y\to \Sigma K induced by this fiber sequence and you can recover X as its fiber
so its not unreasonable
Show that the spaces $(S^1\times\mathbb{C}P^{\infty})/(S^1\times{x_0})$ and $S^3\times\mathbb{C}P^{\infty}$ have isomorphic cohomology rings with $\mathbb{Z}$
亜城木 夢叶

Apply the Kunneth formula, we have
$$H^{}(S^3\times\mathbb{C}P^{\infty};\mathbb{Z})\simeq H^{}(S^3;\mathbb{Z})\bigotimes H^{}(\mathbb{C}P^{\infty};\mathbb{Z})\simeq\Lambda[\alpha_1]\bigotimes R[\beta_1]$$
and
$$H^{}(S^1\times\mathbb{C}P^{\infty},S^{1}\times{x_0};\mathbb{Z})\simeq H^{}(S^1;\mathbb{Z})\bigotimes H^{}(\mathbb{C}P^{\infty},{x_0};\mathbb{Z})\simeq\Lambda[\alpha_2]\bigotimes R[\beta_2]$$
where $\alpha_1,\alpha_2,\beta_1,\beta_2$ are generators.
亜城木 夢叶

don't know how to find the isomorphic function
I think something is wrong w ur latex
the final iso
(This is personal preference, but I would not use \simeq for isomorphism, btw)
why do we get such a thing?
Which part
the map Y to sigma K
"triangle rotation"
i know that in Sp a fibre sequence is this exact triangle
okay ive never heard of triangle rotation
Basically you get the sequence $...\to\Sigma^{-1}Y\to K\to X\to Y \to \Sigma K \to \Sigma X \to \Sigma Y\to...$
MaxJ

in which every triple is distinguished, i.e., a cofiber
this comes from the like unstable puppe sequence
There won't be a topological one, you have already shown they are isomorphic as ungraded rings
They arent iso as graded rings tho
so this iso can't be realized topologically
hmm this confuses me
can u expand
my definition of a fiber sequence is an exact triangle that is a pullback

By universal properties I should get a map from sigma K to Y
But I want a map from Y to sigma K
ooh nevermind i had the universal property backwards
what's isomorphic to genus2? S^1×S^1×S^1×S^1?
genus0=S^2, genus1=S^1×S^1.
its not build from circles in this way
I dont think there is a simpler way to write it down, really
other than the explicit cell decomposition
(notice that we can discount the S^1xS^1xS^1 suggestion by dimension
thx.omg
explicit cell decomposition?
They are CW complexes with fairly simple structure

oh.i see
should the "exactly one" be "at must one" or the points of that

but this would mean the space can be partitioned into open sets ?

if we look at this example in particular , what would be the image of the 2-simplex
@marsh forge
with the maps being injective
but wouldn't there be point in X that's not in the image of a 2-simplex
not every point is
in the image of a 2-simplex
but every point is inthe image of some n-simplex's interior
so each point has a unique (alpha,n) ,
np
just to clarify, an "open cell" is not open in the topology of the CW complex
It's a bit of a misnomer, it refers to the fact that if $\phi : D^n \to X$ is the attaching map, then the open cell is the image of the interior of $D^n$ under $\phi$
diligentClerk

is it characteristic map?
I'm sorry to ask another question in the middle of the question
can constract this map(±1×S^1→S^1) in the middle of this picture?


It seems wrong?

we know a function is continuous if it is continuous at each point of X
Let X be the bigger set tho
then a point a in X is continuous iff for every open ball centered at f(a), we can find an open ball in X centered at a such that its image is contained in the former.
What the image is telling is that for that point, we have a distance of 1
oh
I see what's wrong

I need the open ball in centered at 1
yes
then there will indeed be an open ball centered at a
lol
I could take delta = eps/2. then the image of B(a, delta) would be contained in B( f(a), eps)
@limber ravine it's easier to show it's Lipschitz continuous
just to make sure I understood the concept of cover of a set. Every T is indeed a cover for X

basically X must be contained in the union of all elements in T
yes
Hi! Is there a 4-dimensional topology guru that could help me visualize things? Particularly, a CP² magician 🙂
I take M to be the tubular neighborhood of RP(2) in CP(2). I know that (boundary)M is the lens space L(4,1), and I have a projection M→RP(2). I'd like to understand what preimaging under this projection does to things
rip yea don't know what half those words mean
Sorry ^^”
So I want to prove there is no retraction from the Möbius strip to its boundary circle and I get that the idea is that a generator of the fundamental group of the Möbius band gets sent to a square under the induced inclusion but I’m not sure how to actually formally show this is the case
I would recommend maybe thinking in terms of coordinates? usually a good way to try and get information out of these things
is this from hatcher?
Yeah
lol I had that as hw last week
so you have the push forward of r\circ i must be the identity map since r\circ i is the identity, look at what the generator of the boundary circle gets mapped to
Right so I’m aware intuitively it would get mapped to a square
But I don’t know how to actually show this
If we write the group multiplicatively
You can find an easy homotopy between the obvious rep of the square and the boundary
well let b be the generator of the boundary and a be the generator of the Mobius strip
what's i star (b)?
.
right and if you want r star to be surjective (so that the composition is bijective), what must a be mapped to?
How so
Yeah this part I see
The generator is the center circle. Going around twice is its square. You can write down a homotopy from this second map that pushes everything to the boundary
also somewhat clear it's not the trivial loop
it will land on the once-around-the-boundary map
this might be easiest to see on the fundamental square thing
this is also a good argument
i guess its effectively the same argument in reverse lol
Every point of what?
on the loop
I see what you mean here yeah
Ig it is that simple
take the border of the mobius band and move every point on this loop down toward the middle. once they arrive at the middle every point will be hit by the loop twice
this forces it to be the twice around map
Ah right yeah
(this is kind of subtle, the cardinality of the fiber does not always tell us this much about the loop itself)
Yeah I guess I can just explicitly write out the generator, the homotopy, and see I get the square of the generator for the equator circle
when you feel lost in the weeds trying to write stuff down explicitly is often a good tactic
until you learn to be more confident in the higher level stuff
Yeah o wanna try to do that as much as possible because even if some of this feels intuitive it’s easy to get stuff wrong
yeah, you need to get a feeling for what is allowed and what isnt before you can make quick arguments
Also I just want to check myself up on another one
I needed to show that there is no retraction from S^1 x D^2 to a special circle within it that kinda looks like a link
Gimme a sec for a screenshot
omg I remember this exercise
it's my favorite one from that chapter
I did it with veryhappyperson a long time ago

I remember that this link doesn't even end up mattering
no spoilers
And I was stuck for a very long time but we agree that once we consider this circle included it’s nullhomotopic right?
yes
Because homotopies don’t care about intersecting
yep
Yeah my intuition was messing me up on this one
thats the point of this exercise
to make sure people dont have that intuition flaw
Makes sense
my guess is the preimage of a point is a disc, reason I say that is because locally it should look like a 2d hyper surface in a 4d vector space which you can projectivize to a line in 3d and a tubular neighborhood of a line in 3d is a tube so the preimage of a point is a disk, going back to 4d, the point becomes a line and the disc becomes a cone so looking at the primage of a point on that line should also be a disc
I'm reading Hatchers definition of homology (the method he goes about doing this is beautiful, by the way) and he mentions (pg. 100 ch 2) "C_2 is the infinite cyclic group generated by A" where A is a 2-cell. What does this mean? How do you generate an infinite cyclic group using a 2-cell?
Picture:

C_1 is free abeliean group with basis elements a,b,c,d and C_0 is free ab gp with basis elements x,y
He's making a chain out of these things
He is taking the free group on the set {A}
This is notationally useful as you can relate the geometric and algebraic maps by what they do to A and other cells
What is the set A? Points in the 2cell?
Oh okay
Okay i get it! Thank you!
There seem to be a lot of context missing from that statement.
whats a fundamental cover?

fk
I had so much written and deleted it
X a topology. T an open cover. U subset X a set
such that $U \cap A$ is open in A for every A in T
mns

(I stand corrected. It was indeed a completely specified task).
And note that an open cover is a set such that U { A : A in X} = X for A open in X
mns

(Now I don't think I can do the union of both sides)
mns

$H^{}(S^6\times\mathbb{H}P^{\infty};\mathbb{Z})$ in term of rings, i use kunneth formula and then get $H^{}(S^6;\mathbb{Z})\bigotimes H^{*}(\mathbb{H}P^{\infty};\mathbb{Z})$
亜城木 夢叶

i know $H^{*}(\mathbb{H}P^{\infty};\mathbb{Z})$ is Z[\alpha] with |\alpha|=4, but i am not sure about the term for S^6
亜城木 夢叶
Compile Error! Click the reaction for more information.
(You may edit your message to recompile.)

If you are unsure about the term for S^6 you cannot apply kunneth that simply...
yep
Can someone please walk me through how to compute the fundamental group of these spaces?
I am familiar with the standard open cover that you are supposed to take, but I don't really understand what the boundary is supposed to look like and to what loop the generator of the fundamental group of the intersection retracts. (We haven't covered CW-complexes)

they have a similar trick
you use SvK
The idea is to draw a circle inside the polygon
and separate the shape into the outside and inside of the circle
then your SvK diagram looks like
S^1 -------> U
|
|
v
V
where we basically have the free product of the fundamental group of U and V with the single relation that the loop in U is the same loop as the one in V under the inclusion of that copy of S^1
S^2/{x}, i.e. a sphere without a single point, is apparently homotopy equivalent to D^2. Any idea why?
I can kinda see if I identify the removed point {x} with the boundary of the disk.
Further what if I had multiple points removed from the sphere?
Perhaps again I can identify some point with the boundary of the disk so that in this case it is homotopy equivalent to a disk with n-1 holes in it
The intuition is correct. Removing one point is equivalent to removing a a disk from the surface of the sphere
then you can stretch the hole and get a disk
Then if you want to know the fundamental group of a sphere minus n points, first remove 1 point, and then compute the fundamental group of a disk - (n-1) points
its a homeomorphism from S^n - {a point} to R^n, yes
How exactly would you do that? I'm still getting acquainted with van Kampen so it's not clear to me how I would view a disk with n-1 holes as a union of sets
Ahh okay thank you my bad
Oooooh is it via a deformation retraction onto loops about the missing points?
Yes
I believe that there is a deformation retraction onto the loops but I have no idea how to rigorously say such homotopy exists lol
S^2\{x} is homeomorphic to R^2 which is contractible. All contractible spaces are homotopic with a point
S^2 without n > 0 points is homeomorphic to R^2 without n-1 points
Struggling with a simple result: showing that S1 v S2 has fundamental group Z without Van Kampen. The exercise tells you to use the fact that if X is an n-cell with n>=2 attached to a path connected space A, then the homomorphism functorially induced by the inclusion A -> X is a surjection. All I’ve managed to get out of this is a surjective morphism from the required fundamental group onto Z, but I’m not sure how to show this is also injective
I also have injections from Z into my fundamental group but these don’t help either
Try to show that the injective map from π_1 S¹ is surjective by showing that any loop in the wedge is homotopic to a loop in the image of the inclusion
Oh right
Of course yeah by the same proof method as for the proposition I’m meant to use
Thanks
Oh no right it’s even simpler than that since I can view S1 v S2 as attaching D2 to S1 by sending the boundary to a single point
Epic

My usual choice of sets would be taking U as the interior of the polygon, which is contractible, and V as the "punctured" polygon you obtain by removing an interior point, which should retract onto the boundary with some identified sides. The intersection is then homotopy equivalent to S1.
What I don't understand is how to compute the fundamental group of V.
I am familiar with examples such as the torus, where V is equivalent to S1 v S1, and the real projective plane where V is equivalent to S1 with the "antipodal relation", but given an arbitrary set of identifications of sides I struggle to understand what the boundary looks like.
If the north and south pole of S^2 are glued together is the result a torus?
probably not because they meet at a point, so it's not even a manifold
They are homotopy equivalent but not homeomorphic I’m pretty sure
I don't think so, S^2 with the north and south pole identified should be homotopy equivalent to S^2 v S^1 which has a different fundamental group from the torus
How did you get that homotopy equivalence? I’m really bad at these for now
I think they also have different euler characteristics
Pretty sure that's right
It is homotopy equivalent to a sphere with the poles connected by a line
then you bring the end points of the line together to turn it into a circle
yeah that's how we did it
I personally did it by taking the torus and just collapsing the inner circle to a point, why does that not work?
it should also be equivalent to a "pinched" torus
that is also one way of doing it
So then why is it not homotopy equivalent to the torus 🤔
if collapsing circles to a point was legal there would be no purpose to topology
But is it not a CW pair?
that's like saying the circle is homotopy equivalent to a point
You can only collapse contractible stuff in CW pairs
Yeah ofc
Thanks
I thought that by "collapsing" you meant taking the quotient of the torus by its inner circle sorry
Yeah that is what I meant but the torus isn’t homotopy equivalent to that
What is the reason for bothering with finiteness in this argument
So I want to make sure I don’t overthink things to much because I’ve been using arguments similar to this proof in a few occasions

Ie when they say that f^-1(B) is the union of possibly infinitely many disjoint open intervals, what stops us from saying l: homotope the restriction of f to each of the closures of these intervals to a path that doesn’t pass through x
I feel like there are so many other occasions when finiteness isn’t so much of a problem and we let “do x for all y’s” arguments happen without a second thought so I want to know why it’s so important here
Yeah feels unnecessary here, probably just done to make it easier to write because now instead of doing all those homotopies at once you can do them one at a time and write the entire thing as a composition
Or there might be a proper reason that we are missing
I’m certain there’s a proper reason for it because multiple exercises later ask to modify this technique (which is essentially lebesgue number lemma) for other situations
But yeah I can’t see what it is
What’s that lol
open
Yeah gimme a sec
Then you can parametrize it by a path, by traversing the radius 1/n loop in [2^(-n), 2^(-n-1)]
Lol nice
This is continuous easy to check 
Yeah
But if you take the open set to be the right half
then we can't apply that argument to homotope each loop to a radius 1 loop
because even though it works in each interval
It is no longer a continuous path overall
because you are going around the loop faster and faster
so for any delta
you are going a distance of 1
Oh right I see what you mean
It’s like taking sin(1/x) instead of xsin(1/x)
Right so when you only homotope finitely many intervals you have control on the “speed” they’re traversed at so things work out
I'm having trouble thinking about van Kemper for two parts i.e. \pi(A \cup B)\cong (\pi(A)*\pi(B))/N
I'm so confused about what the N is. Somebody told me I can think of it as \pi(A\cap B) but I'm not sure if this is true or why it is
It sort of is
You have the following diagram
A cap B → B
↓
A
where the 2 maps are inclusions. Apply pi_1 on all 3 spaces and you have induced maps
pi_1(A cap B) → pi_1(B)
↓
pi_1(A)
Van kampen says that the fundamental group of the union is the free product of pi_1(A) and pi_1(B), quotiented by the relation that identifies the images of x from pi_1(A cap B) in the 2 groups
In slightly more categorical language,
A cap B → B
↓ ↓
A → A cup B
is a pushout of spaces, and van kampen says that under nice conditions, this is a pushout of groups after you apply the pi_1 functor
The idea is that if A and B intersected at just the basepoint, then the fundamental group of the union would be the free product of the 2 fundamental groups, but when they have a non trivial intersection, then taking a free product double counts, and quotienting by that relation gets rid of the double counting
Explicitly what moldi is saying here is that we have inclusion maps A cap B -> A and A cap B -> B inducing homomorphisms
hatcherneutral44

we want to identify the image of a loop under the first map with an image of a map under the second


I'm sorry to insist, but can somebody help me out with this?
I had to go afk but I responded earlier today
oh did you turn off ping or did I just miss it
I turned off ping
V will always be a wedge of circles
it's here
we retract the polygon interior onto the boundary
then we just have like these lines
with some points and some line identified
you do those identifications
and then you see how many circles are left
so in the first example is the boundary homotopy equivalent to S^1 v S^1?
you should get one circle for each letter and also one for any non-lettered sides
so does the orientation of the identifications only matter for the relations?
Orientation also controls like, how the edges are identified
for example you need to check that you actually get wedges of circles by showing that every vertex ends up identified
otherwise its trickier
So for example in the pentagon all of the vertices should be identified, so I end up with a bouquet of three circles, right?

yes
so what I got by retracting the intersection loop onto the boundary is the following relation: if a, b, c are the generators for the fundamental group of the boundary and c is the one that comes from the non-lettered side, then c * a * b = b * a, is this correct?
yeah

in order for this set to be open 0 must have an open neighbourhood contained in the image of U
To be open in the subspace the circle
yes
I see now, V in R^2
but I have some questions from before that are coming up again
what is the intersection between a and (b,c)
I gotta dip soon, other people are gonna answer
the empty set? if you mean by a, the singleton {a}
bruh
edited
I think I made my point
(a,b) are arbitrary
I edited because I wrote a and (a,b) but what I want to ask is the intersection between a point in R and a point in R2
you mean the line that goes through both points?
you generally don't intersect points set theoretically in this context
well a is not an element of R2, I guess one could interpret it as (a,0) maybe
there's no (a,b) in R^2 such that (a,b) intersect S^1 is a subset of f( [0, 1/4) )
I don't quite understand what that has to do with the example
(it doesn't xd it was just a question from other time lol)
this
is my question now

what you're trying to prove is that f( [0, 1/4) ) is not open in S^1, and the way you go about doing it is by proving that P is not interior to f( [0, 1/4) ) despite belonging to f( [0, 1/4) )
If you recall the definition of subspace topology, the open sets of S^1 are of the form V intersect S^1 where V is open in R^2.
So P is interior to f( [0, 1/4) ) if and only if there is an open subset W of S^1, so a subset of the form V intersect S^1 where V is open in R^2, such that P ∈ W and W c f( [0, 1/4) )
the point is why there is no subset
Except there is no such set, because if P ∈ W = V ∩ S^1, then since V is open in R^2 it contains an open ball containing P, and that open ball must intersect S^1 in a point that does not belong to f ( [0, 1/4) )
the point is that any open ball containing P contains a point that is in S^1 but not in f( [0, 1/4) )
What is the proper face of a simplex
(Pg. 104 hatcher)
Is it just a face of the simplex which is not the entire simplex?
I guess more directly: what is an open simplex
"A simplex with all its proper faces deleted"
So if my simplex is [v_0,v_1,v_2], how do I delete the proper faces (presumably [v_i,v_j] and [v_i] for all i,j)
Nvm dumb

is there a name for this diagram
my prof showed me it and i was surprised to see almost the exact same thing in a textbook i was randomly browsing
but i cant seem to find it again 
moldi is here to degrade me in topology now too? god help mme
so just an atlas?
i dont actually know what an atlas is
but my prof also said that word a lot so
Yeah that is a condition for a collection of maps to be an atlas

The 2 maps going to R^n are the maps of the atlas
And the phi_UV is the transition map
is an atlas just a specific map then
Which is defined on the intersection because those atlas maps are bijections so you can go back along them
im asking out of ignorance, im gonna do my googling soon
It is a collection of maps
The condition to be an atlas is that every transition map should be a homeomorphism
so phiV is just an element of the atlas..?
It is a collection of maps, each defined on an open subset of the manifold
yes
✓
✓



leuchttrum
lmao I have one of those too
it's so sexy 
mine isn't that small?
like 250 mid sized pages
and im only gonna use it for ind. study so i likely wont fill it up
idk i really like it
I like the paper quality or whatever that's called, but I'm gonna stick with normal big notebooks from now on
In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an n-dimensional manifold, or n-manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of n-dimensional Euclidean space.
One-dimensional manifold...
this is so detailed yo wtf
wikipedia has surprisingly good explainers
"Topology ignores bending, so a small piece of a circle is treated the same as a small piece of a line" is this just the basic thing that as you zoom into the circle it approaches a line yadda yadda
No, that is slightly different
Because this does not require infinite zoom
Bending is allowed at any level in topology
This is a sort of prescribed level of “good enough” zooming in
Like instead of simply knowing you can do it
You partition the space into a good enough cover
Where overlaps place nicely with eachother
hmmm
maybe im fixating but is there any subtlety to the word “bending” that i might be missing
independent study so no
it’s essentially a professor i really like throwing pictures and information at me, me desperately trying to write everything, and then spending the rest of the week actually understanding it
Interesting. Good luck with your studies. Still, I'm curious who is your prof. if it's ok by you : )
I was curious about which university are you studying that's all. It might be unrelated to the topic of the group. So feel free to ignore me :))
Very cool. Keep the good work :]

If you are studying about manifolds, you might find this guy's notes very helpful (https://merry.io). It might be a little bit hard for a self study, but is worthy of your time.
oh wow im def bookmarking that, merci
glad to be helpful 🙂

is a figure 8 not a manifold because of the intersection?
wait but at the intersection wouldnt it just be homeomorphic to R^2
yes

there is no homeomorphism between a single point and R^2 (exercise)
wait i was thinking like a neighborhood around the intersection
there is no homeomorphism between the letter x and R^2
oh wait yeah that's dumb
the intersection of two lines doesnt create a plane per se
it just makes an X  who would've thought
who would've thought
and that intersection just straight up isnt euclidean then right
you probably mean union there, the intersection would just be a point
yes
ok well neighborhood around the intersection ig
are neighborhoods the right way to think actually
also keep in mind that the local homeo to R^n has to be the same n
so it cant be like R^2 one place and R^1 another place
i did not know this
yes
there can't be homomorphic maps between R^n and R^m in general right
like n and m being different
there'd be a kernel
and in general i suppose any n dimensional surface that intersects itself wont be a manifold
things are kinda coming together 