#point-set-topology
1 messages · Page 153 of 1
do you know what the fundamental group is?
a way to defined the fundamental group is in terms of maps S1->X, where we quotient by homotopic maps
and also we fix a basepoint I guess
the nth homotopy group is the same, only Sn->X instead of S1->X
the group operation is a bit harder to visualize maybe, if you see Sn as [0,1]^n/~, the group operation is pasting two blocks side by side
just like the group operation in the fundamental group is pasting two squares side by side
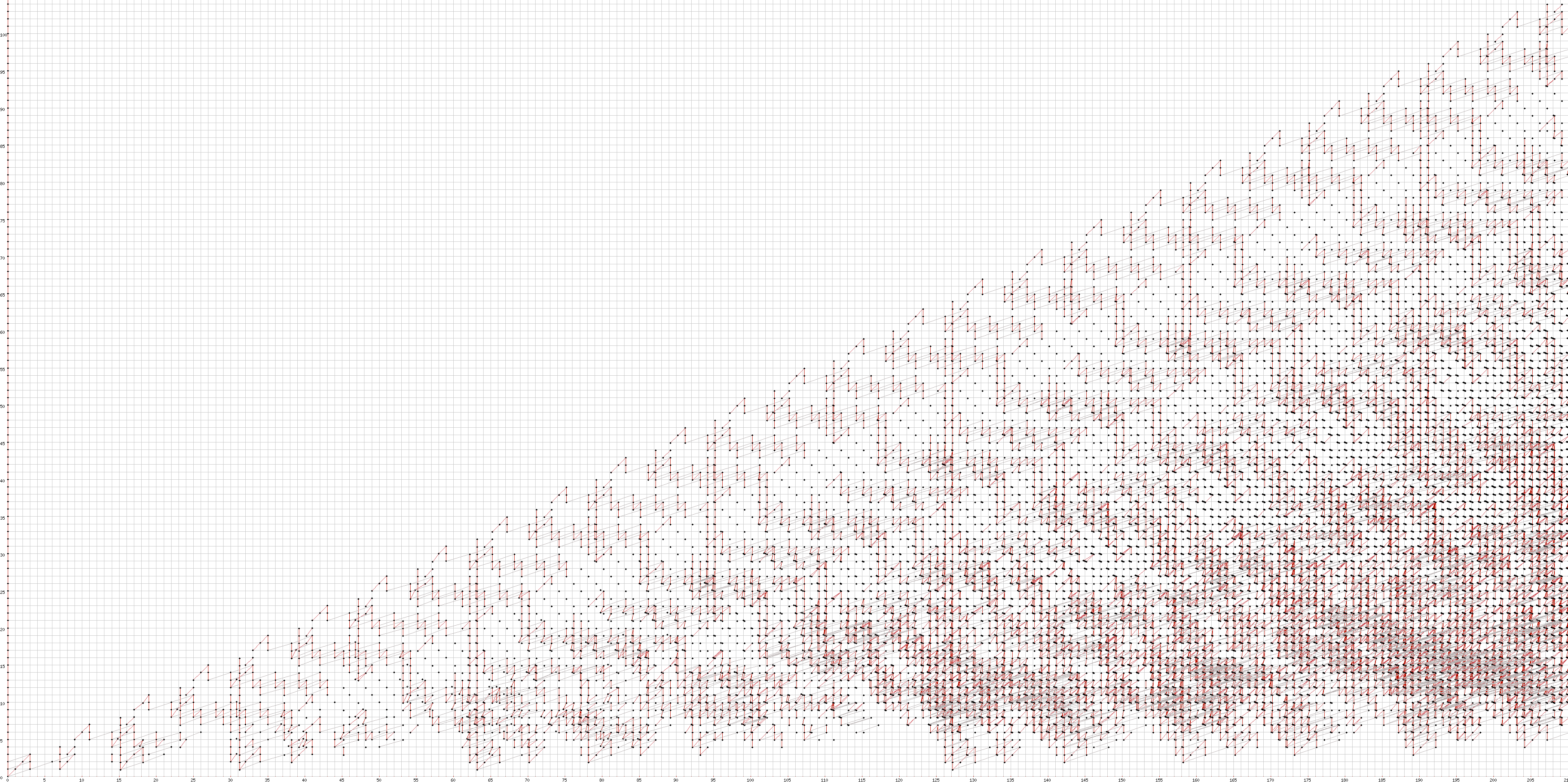
this is a table of the first few homotopy groups of spheres
S^1 is simple; it only has \pi_1(S^1)=Z
tag yourself I'm the yellow ones
S^2 and S^3 have the same homotopy groups and they are very complicated
lol what
oh also: the colored entries below this bold line are in the "stable range" and they eventually stabilize along the diagonals
the things they stabilize to are the stable homotopy groups of spheres
Why is everything below the subdiagonal zero
easy
isn't it true that for any sequence of groups, we can find some space that has that sequence as its sequence of homotopy groups
Coming from someone who doesn't know what a homology is
cuz maps S^k -> S^n with k<n are contractible
if you map a lower dimensional sphere into a higher dimensional sphere it's contractable
cuz they aren't surjective
yea you got it
if a map isn't surjective, recall that S^n minus a point is R^n, and it's contractible
What's contractable 
means it's homotopic to a constant map
contractible means that it's homotopic to a point
and uhhhh
learn algebraic topology lol
for example imagine mapping S^1 into S^2, say to the equator
Just learn it lol
then you can just deform this circle to something smaller and smaller until it collapses to a point
you can imagine doing this for every such map S^1->S^2
I don't know if it's close to your area of interest but it's pretty core in math in general
so indeed there are no nontrivial homotopy classes of maps S^1->S^2
you can sort of imagine how this works in general
this is the picture I have in mind
showing that it's nullhomotopic
the technical details go like this. a map Sk->Sn (fix S1 -> S2 for example) could be surjective if it's continuous, but not if it's smooth. and continuous maps between smooth manifolds are homotopic to smooth maps
Okay can I ask why we do this
I know
why we want to understand homotopy groups of spheres?
I mean why do we care about characterising topological spaces using algebra
like a good rule is, if you have some spaces and you want to show they are different, the easiest way is to show that some invariant is different
the invariants turn out to be quite strong, so you can have results like the famous poincare conjecture: Every simply connected, closed 3-manifold is homeomorphic to the 3-sphere.
a nice, accessible result is the classification of closed 2-manifolds, they're completely determined by their fundamental group
And we can use this in physics?
absolutely
uhh I guess
Because I can understand characterising for the sake of it
there's another reason which is a bit more high brow. Stable homotopy groups of spheres have a lot to do with classification of manifolds, with exotic spheres, all sorts of actual geometry like this
I mean it's just an important tool in the study of geometric spaces
and even spaces which, a priori, are not geometric
like schemes over finite fields and whatnot
What is meant by non geometric? Non metrizable?
Alright ty
although the usual definitions do apply to a lot of other spaces
path connected and semilocally simply connected is enough
for fundamental group, etc
What does it mean to be geometric? The way I understand it; its having distance
but even spaces that look pretty wild have very good algebraic topological invariants
But I've seen things like geometric measure theory
that you can come up with
I dunno, it depends
here's an example
in algebraic geometry, we care about varieties. varieties over the complex numbers C are like manifolds so they're very geometric and their topological study is very similar to the study of manifolds
but you can take varieties over other fields
fields that don't even have natural topologies associated to them
I don't wanna say much but it's hard to wave hands without an example
varieties over C are not like manifolds at all if you still use the Zariski topology
The Zariski topology is almost never Hausdorff
but it still carries lots of useful information
in sheaf cohomology
I get what you're saying
that homotopy groups table is so spooky
is it proven that the diagonals are eventually constant ?
yes
this is the Freudenthal suspension theorem and you prove it in any reasonable algebraic topology course/textbook
:*)
Also there's a theorem of Serre that tells you when non-torsion entires appear
these are the yellow entries
and it has to do with the image of the so called J homomorphism
you can attack this with rational homotopy theory so this somehow isn't hard
but all the other entires in the table are mysterious
we have a decent grasp of how the entries stabilize along the diagonals (this is something that a computer can calculate but it's extremely complicated) but we know almost nothing about individual entires in the "unstable" range
it's like computational homotopy theory
there are relatively few people in homotopy theory that actually care about computing homotopy groups of spheres
yea I think that's fair
but yea go figure, it's only a marginally active area because people don't want to deal with shit like this http://i.imgur.com/HU7aQgy.png
it looks so mysterious
cuz its cool
I mean we care about abstract homotopy theory because it solves actual problems at the end of the day
and we don't know how to solve them any other way
some of them are really immediate problems, some of them are really subtle technical problems
excellent example of an immediate problem: there is an upcoming paper that proves the main conjecture on arithmetic topology about knots and primes using abstract homotopy theory
another one: the construction of the cohomology theory TMF, which has loads to do with string theory and mathematical physics, has some crucial inputs from abstract homotopy and derived algebraic geometry
more subtle problems: for a while there were some theorems in algebraic geometry that needed some additional qualifiers because the technical issues come down to a certain \infty-topos being hypercomplete
you can deal with hypercomplete \infty-topoi using classical methods, e.g. simplicial sheaves, but for non-hypercomplete \infty-topoi you really need abstract homotopy theory in the sense of Lurie
Gabber used this in a pretty nontrivial way in a few papers once the additional qualifiers were removed.
If we are given a ring R we can construct a graded ring S where S_0 = R and S_i = 0 else. Then is Proj S = Spec R? if I is a homogenous ideal of S then surely I has to contain the irrelevant ideal by definition so Proj S has no points?
I need a quick sanity check: I am to show that every point of a locally compact (every point has compact neighbourhood) Hausdorff space has a normal neighbourhood. Doesn't this follow directly from the fact that every subset of a Hausdorff space is hausdorff and that hausdorff + compact implies normal?
define normal neighborhood?
The exercise doesn't actually define it, but I assume normal with respect to subspace topology
Normal being T1-T4
Maybe my assumption is wrong, because it seems too easy
Gonna have to re-check my script
ye @desert vortex
you get no points
which is dumb
but you should morally get the things generated by degree 0
so you should morally get Spec R
Yeah you should, whats grothendiecks number I need to call him
In Hartshorne he says that "we let v :K --> Z be the valuation corresponding to the discrete valuation ring R where K is the quotient field", how is v defined?
p. 130 if it helps
Hint: think of the p adic valuation arising from the dvr Z_p
That's sort of the general flavor
@gritty widget There are just random problems in stuff like differential geometry or arithmetic that end up being questions about stable homotopy theory.
Im trying to self study Munkres topology but I'm kind of getting bogged down in the wording
Do you guys know of any video lectures or additional materials to supplement it?
there are video lectures
and there's a lot of notes, and other books
but what's the problem with the book?
I used the book Elementary Topology by Oleg Viro et all (and talked to Viro himself)
it might be a (natural) part of you getting used to working through math textbooks
have you done analysis yet?
most people do basic topology after a first course in analysis
I've taken real analysis
I've worked through a couple of math books, but this is the first one that's really confused me with the wording
can you be more specific?
maybe his writing style just isn't for you
munkres is kinda wordy
you can try the suggestion above
his stuff on functions in particular has left me very confused
right now I'm reading through the recursion section
On the principle of recursive definition
why is that important
oh ok
I also skipped stuff in Elementary Topology
thanks
👍
❤
although on the definition, do you guys know how the principle works
I dont))
ok
which part of the section?
p is the predicate that defines your function
in the special case of 8.1-8.3, p is "min"
so p takes the minimum of the complement of the image
the notation is a bit confusing
but what the theorem is saying is
if you have a rule (p) that tells you how to pick the next element f(n+1) once you picked the first n (meaning you have chosen f(1), f(2), ..., f(n) ), then you can make a function on all the positive integers out of it
for example imagine my rule p is "pick the smallest power of 2 which hasn't been picked"
then f(1) = 1, f(2) = 2, f(3) = 4, f(4) = 8 and so on
right, but how does the h function fit into it?
well I've been calling it f
but the function that you build out of p is called h
see, what p does is "take a function defined on an initial segment {1, ..., i-1} and spit out a value"
in particular we can take the function h restricted to {1, ..., i-1}
and what the theorem says is that h is built by taking h(i) = this value
He writes, suppose p is a function that assigns, to each function f...
yeah
In this case, are all those functions defined the same way?
what do you mean
p is a function
which takes a function and gives you a number
or well, an element of A
and p is defined in turn by the function it takes?
no p is given
the theorem says that if you have p, then you can construct a function h uniquely
which is built out of an initial value a_0 and applying p over and over
👍
hello
i have 2 questions
the first one is: why the Sphere S2 isnt homeomorf to R2??
is because there is a point from the sphere which you dont know where it goes?
Not quite
s2 is compact, but r2 is not?
S^2 minus a point is homeomorphic to R^2
okey
If you have a homeomorphism from a proper subspace A of X into Y, you can't extend that to a homeomorphism of X to Y
stereographic projection is to take 1 point from the sphere and throw a line of length 1 to the plane, right?
Yeah
okey oket
so the north pole will result into a point on the plane
cuz it is the top of the sphere of radius 1
Lochverstärker's compactness comment shows you why abstractly you can't have such a homeomorphism
okey, but sphere minus a point
is compact too
and r2 isnt
but u said the sphere minus a point is homeomorf
okey, i am trying to prove that sn is a manifold
one way is because it is contained on rn+1, and rn is hausdorff so sn is too
but i was looking another way uwu
the sphere minus a point is not compact?
you can look at heine-borel for example
something else idk the word in english
closed and bounded, yeah
but that's only for subsets of Rn
sn is a subset uwu
generally compactness is defined via open covers
yes, so here you can apply that
and well
continuous functions preserve compactness
so a compact and non-compact space can't be homeomorphic
okey, but still. Sn minus a point is homeomorf. Why full sn isnt? (apart from the compactness)
What do you mean apart from that
that the north pole
with the stereographic projection will result into a point of the plane
right?
Stereographic projection is defined only on S^n minus the North Pole
It doesn't map the North Pole anywhere
why on the north pole not?
because if the north pole is at length 1 from the plane, its stereographic projection will result in the origin of the plane
Length 1 has literally nothing to do with it
It's just that there's no unique line between the North Pole and the North Pole
between the north pole and what?
If you give me two points on the sphere you can talk about the line between them
And that's how stereographic projection is defined, if you give me a point x on the sphere which isn't the North Pole, then take the line between x and the North Pole, that intersects the xy plane at exactly one point
That point is what we call the image of x
But there's no single line between the North Pole and itself
So this doesn't make sense here
And if you wanted to just map the North Pole by proxy to something in R^n, it wouldn't be continuous. One way to see it is that the image of a continuous function S^n -> R^n is compact, in particular bounded
aaaaaaaaaaah
okey so, with this, how can i prove that Sn is a manifold?
doing the stereographic projection for the north pole and for the south pole???
Every point is either not the North Pole or not the South Pole
with the north pole, u dont have image for the north pole
but using the south, u get the image of the north pole
and viceversa
why does this work?
What do you mean why does this work? There's nothing to say
Give me a point
Is it the north pole? If not, projection wrt the north pole suffices
If it is the north pole, then it's not the south pole, so projection wrt south pole suffices
what is wrt?
With respect to
okey. So u do the stereographic projection for all the points wrt the north pole, but if it is the north pole, u do it wrt the south pole, right? So this way, all the points have image
but the north pole still has a different "source"
That's kinda vague but... All you need is that for each point there's a chart covering it.
ah
and because they are mapped into rn, which is hausdorff, u always have a chart?
(idk what chart is, but i supposed it is an open covering (?) )
charts describe the maps of nbhds -> rn
If every point has such a neighborhood then you have a manifold

wut
A surface word labels the edges of a polygon with letters so that the edges may be identified to form a surface
a is the inverse of A so that if a is oriented clockwise A is oriented counterclockwise
So aA gives a sphere where as aa gives projective plane
does there exist a topological space that is simply connected, and remains simply connected upon the removal of any 2 points, but removing any 3 points will make it fail to be simply connected?
Is there an obvious space that is sc if you remove one point but not two?
Oh duh
Does the space created by taking a a sphere and attaching a 2disk along the equator work?
@west spindle
Hmm this might have problems along the equator
is that supposed to be homeo to the space obtained from {0,1,2}xD by gluing together the boundaries of the three discs
Yeah I guess it would be
That was my approach anyway, if it works it could probably be generalized to Dx[n]
But I’m worried about those boundary points once n>2
Maybe it’s not a big deal? You could attach the new disk a little higher and then it shouldn’t matter which pair you consider to be the sphere
@marsh forge how does it work
Pick two points in the northern hemisphere
Draw a small loop around one of the points but not the other
How to you resolve this loop?
Yeah I guess you are stuck once you can’t homotopy your removed point however you want, my bad
How about
A sphere
With disks paralel to the equator
For every rational height
I think this works(?)
What happens when I remove a point along one of the inner disks boundaries?
It's still simply connected
The thing is does it become not simply connected when you remove 3 pts?
Nah, it fails that :( it's still simply connected
What happens if remove two points in an inner disk and draw your same loop, by the way? I believe it’s simply connected but I’m not seeing it immediately
Oh good point..
Yeah wait I don’t believe it anymore lol
My concern wrt to Ann’s question is that I have a weak conjecture that any space that can survive 2 points removed could survive countable infinitely many
All you need to disprove the existence of such a space (described in Ann's q) is prove that simply connected upon removal of 2 points implies there exists a triple of points when removed yields simply connected
I can think of plenty of constructions that satisfy Ann’s q up to like 3 points you can’t remove lol
We know such a space can’t be locally a 3-space anywhere
R^3 is what I mean by 3 space
It can’t be a 2 manifold
Hatcher uses ft | A = 1 in the definition of a deformation retraction. I don't know the terminology, what does that mean?
Thx, I'll look that up
Ah gotcha
Very simple idea. Thank you
No calculation needed. $p\in M$ is a critical point of $f\colon M\rightarrow\mathbb{R}$ by definition iff $df_{\vert p}=0$. The following is just notation $df(X)=X(f)$. So $X,Y{\vert p}=df([X,Y]){\vert p}=0$
Axion:
How do you take a Poisson Bracket of vectorfields? It is a biderivation on functions. They must refer to the Lie Bracket.
But I think if you have a Possion Manifold $(M,\pi)$ and take $f\in\mathcal{C}^\infty(M)$ and $p\in M$ is a critical point of $f$, then $\forall g\in\mathcal{C}^\infty(M)$ we have ${f,g}{\vert p}=\pi(df\wedge dg){\vert p}=0$ because $df_{\vert p}=0$. So in this sense the Poisson bracket is 0
Axion:
What would people suggest as a sort of "next step" after reading something like Hatcher?
Would May be the next thing to look at? He goes into some more advanced (esp categorical) notions but I'm not sure how much it actually extends the theory
Can someone fill me in on what A' means in topology if A is a subset of a nonempty set X? Because supposedly its not set compliment because A^c is that instead
Maybe closure
I've seen it to mean "set of limit/accumulation points of A"
hmm alright thanks
TOPOLOGY
Just show that denseness is transitive
well, there's some algebraic numbers not in R
I guess real, irrational, and algebraic number
denseness is transitive?
I'm not sure what you mean by that
xD I haven't learned topology
Oh I see
Between every two reals, there are two rationals
And you can find an irrational algebraic number between rationals
also the transitive ness is A ~ B, B ~ C means A ~ C
remember that transitive thing?
So you can take a polynomial P(x), and consider P(x-q) for q rational
Scale appropriately
This shows you that if r is algebraic, then r+q is algebraic as well
Take any irrational algebraic number
And you are done
By density of Q
Lmao
If I'm following correctly
xD
Wait no that was dumb
But @dim meadow I'm still not sure what you're trying to show
You can find a dense subset of R inside your set
So your set is dense
Transitivity is easier tbh
But I like invariant translation actions
Try to construct a polynomial with integer coefficients that has a real irrational root between any two given real numbers
Liquid is telling you to fix an irrational and take all rational translations (which is clearly dense)
Ok I'm confused too I guess lol
🐴
Ok nvm liquid I read your messages 3 times, and I'm still not sure
But what I thought was that
Since rationals are dense in reals
for any rationals a and b, you can find another rational c such that a/sqrt(2)<c<b/sqrt(2)
Then c*sqrt(2) is an irrational algebraic number between the two given rational
Sure that works too
Tbh the fact that algebraics form a field gives it away immediately
The fact that it is a field isn't so trivial though
I'm comparing it's triviality to the translation proof though
liquid: translation proof
field property: am I a joke to you
Is there a cleaner proof using logic?
It's an easy result in FOL that once you define a constant, you can add it to your language
is the translation proof not "clean" enough?
Ok that makes more sense
I mean, just the multiplication one is annoying
Yeah
🐴
You can skip all of the field axioms except closure and inverses by looking at it as a subfield of C
yes
So I just started studying point-set topology in real analysis and I'm kinda confused on how to apply definitions to answer certain questions, and was wondering if anyone is willing to help me answer a problem that I have. Ill dm the question to you if you want, any help is appreciated.
Just post it here
there's a reason why  is an emote
is an emote
Well what are you confused about
Okay so i) if V is a neighbourhood then there exist an open set that contains all of the constant zero functions. Since V is a neighbourhood then it is also a neighbourhood of all the points in the set that contains all the zero functions and so there exist points x_{1} .... x_{n} such that g(x) ... = 0 is this correct? idk
all the constant zero functions
hm
Well, if V is a neighborhood of f, then it contains an open set which has f as an element
but f have infinitely many points that make it zero since its just the constant zero function.
Well, you just need a neighborhood of f
like uh, consider the open set $V_{0.5, (-1, 1)}$
Darkrifts:
i'm p sure that has f in it
@hearty axle do you understand how they're defining their open sets here?
Most likely no. I'm confused about some of the notation as well.
Darkrifts:
right?
so all continuous functions [0,1] that have a value f(x) between a and b?
no, continuous functions from [0,1] such that f(x) in (a,b) for the chosen x
yeah thats what i meant
since the choice of x is important
yep
Darkrifts:
open sets generated by the collection of V?
Yeah
So if V is some open set, what do you know about V in relation to S?
In other words, how does this generation of a topology actually work
If S is open then V is open ?

I'm not quite sure you understand what it means for a set to generate a topology
V is open, what can you say about it in relation to S
S is a collection of open sets, it doesn't make sense to talk about S being open
Sorry im pretty weak at topology.... not quite sure what you guys are trying to get at here.
Alright so, S is your collection of your basic open sets
and do you know much about generating a topology?
dw I'm bad at topo too
Could you state the rules behind being a topology?
must contain empty set and whole set , intersection of sets be open , union of set is open
?
You really should look at the definition of a generating set for a topology
Or a basis for a topology
^
Union of any open sets is open
and intersection of finitely many open be open, yes?
Well, if you were to turn {V} into a topology, what would it require you to do?
you have that each V is open, so what would you need in order to satisfy the axioms of a topology?
i.e. how would you have to change the set
you would need to make sure the union is open and the intersection is open?
Reformulating your statement there, you need to make your set larger, such that it's closed under infinite union
and finite intersection
But that alone doesn't make it work
You have V and W open, so you want V u W open, which is why you need to make your set larger by including all your unions and making it closed
(and in fact closed under infinite union, since y a k n o w)
so, how would you make it closed under your intersection requirement?
Sorry I dont understand the connections here, $\tau(S)$ is a topology, but you are saying $V_{x}$ isnt but how can we make V_{x} larger so it becomes a topology?
{V_x,U} isn't
it's not closed under unions, finite intersection, it's missing some other stuff as well
So, how do you extend it to make it a topology with V_x,U open for all x, U
unironically you just have to add the unions, finite intersections, and the full set (and empty)
and intersection of finitely many open be open, yes?
I had never thought about that, and it seems to makes perfect sense, you mean that the limit of a union open sets could be closed, right?
@real notch
What do you mean by limit
yeah, true
Taking the intersection of infinitely many open sets can get you a closed set yes
right
Think about taking the intersection of (-1/n,1/n) with n from 1 to infinity
limit as in the open sets would have to approach something?
or rather, the intersection would
It's not too hard to see that this intersection is just the single point 0 which is a closed set
So, I'm reading stack project book's chapter on sheaves on space: https://stacks.math.columbia.edu/tag/006D
and I realized this, you can use 2-object-cat-valued presheaves on space, to detect disconnectedness (though not connectedness), at least on well-behaved space. The proof is this, suppose you have $U, V \subset X$ and $U \cap V \neq \emptyset$ then the presheaf on U, $F(U)$ would have restriction on $U \cap V$, $ F(U \cap V)$, similarly for V, the presheaf on V also have restriction on $U \cap V$, so $F(U) = F(U \cap V) = F(V)$. Hence for connected subspace of a topological space, this presheaf would have the same value on the same component, or different value of the presheaf on two open sets $\Rightarrow$ the two open sets lie on different component, the converse (have the same value $\Rightarrow$ in the same component) is not true though.
is this correct?
an open source textbook and reference work on algebraic geometry
Raysena:
What’s the proof for 1?
Well, you agree that 1) All topologies contain the whole space and empty set as an open set
and 2) the complement of an open set is closed
Do you see how the result follows from these two?
A common saying is that a topology is not a door
a set can be both open and closed (called clopen)
or it can be neither
Sort of something you just get used to
Wack
(if a set is connected, then the only clopen sets are the empty set and the whole set, so it's not horrible)
It might be enlightening to work through a direct proof
if you know a limit point definition or similar of a closed set
you can see pretty quickly why both X and \emptyset have to be closed
and they are of course defined to be open
I get it now
Oh
They’re open to the topology by definition
And then the proof shows how they are also closed
Ok
@bitter yoke do clopen sets in general correspond to the connected components of a space
or are their weird point-set counterexamples?
That's true I'm pretty sure
at least if you consider unions of connected components as well
yeah
Ok...not a question...but a walk through of something..
Take a sphere....
Cut it into infinite number of circles...
Adding those circles circumference should give sphere volume right?
Think about it
All those circless placed together would make the aphere
So their circumference added should be volume
Let's put the equation in perspective here
Whose circumference added two times gives volume of sphere
Which part?
yes, the sphere ball is a reunion of circles, but that's not nearly enough to compute the volume with it
actually idk if you're using the words sphere and circle like everyone else

Hey guys it's ADVERTISING TIME
Basically I made a video
I don't know if I can send links
https: // www.youtube.com / watch?v=LCUA4RERXvw
Just in case
Anyway I'd like people to critique this video because I've been stalling editing it for like 3 months
Pfff..did a mistake...I was meaning the surface area not the volume
also a bit the wrong channel?
Actually that is kind of what you’d be doing, or could do, to find the surface area of a sphere when it comes to area of a surface of revolution of a semi circle
@gritty widget
The formalisation of “adding up infinitely many small circles” is integration
Anyone have any experience with Armstrong for an Intro to Topology?
Where should i go to learn continuous geometry and is it taught at any university?
What is continuous Geometry?
In mathematics, continuous geometry is an analogue of complex projective geometry introduced by von Neumann (1936, 1998), where instead of the dimension of a subspace being in a discrete set 0, 1, ..., n, it can be an element of the unit interval [0,1]. Von Neumann was motiv...
This stuff?

trefoil knot: https://www.youtube.com/watch?v=MnHOwM1xWfE

My understanding may be incorrect but a helicoid(http://mathworld.wolfram.com/HoffmansMinimalSurface.html http://mathworld.wolfram.com/Helicoid.html for reference) is the equivalent of the brachistochrone but for stacked spirals, am I correct in thinking this?
(note: deleted something that belonged in #geometry-and-trigonometry )
How is this different from the standard topology on R?
Isn't (a,b)-K a union of open balls?
Ooh
Yes
is there an example of a space that deformation retracts to a point, but not strongly deformation retracts to a (potentially different) point?
Finally someone didn't fall victim to empty projections
Why not
no
literally never
the only thing I know about topology is the stuff necessary to define Top
So, my book says that the arc length function s(t), based at t=a, has an inverse t(s) based at b=s(a) and that the reciprocal of ds/dt is the derivative of dt/ds. I'm not sure I follow/understand what the book means, considering this problem where s(t) = sinh(t), so t(s) = arcsinh(s). The derivatives don't match up, so clearly I dont get what the book is trying to say there
it's barrett o'neil's elementary differential geometry chapter 2.2, if that makes a difference
why do you say that the derivatives don't match ?
derivative of sinh(t) wrt t is cosh(t), whereas derivative of arcsinh(s) wrt s is (s^2 +1)^{-1/2}
sqrt(sinh(t)^2 +1) = cosh(2t) =/=cosh(t)
yeah i am
at least, i am sure that the wiki article says so
but also, if I include my coeffs, i think that actually does work out
$\forall t\in\bbR,~\operatorname{argsinh} '(t)=\frac 1{\sqrt{1+t^2}}$
Tuong:
I don't know them by heart
right
so is there a square root or not ?
there is
oh, i missed the {-1/2} i just had -1
oops
i think im in the wrong profession, so many little fiddly bits, im so bad at this
Copied here so it won't get bulldozed in questions:
Ugh okay, this is really about dual coordinitizations. So I've coordinate system 1, $[\theta^i]$ and 2, $[\eta_j]$ which you can think of as two global charts of a manifold (that will admit global charts). If I have the vector fields $\partial_i:=\dfrac{\partial}{\partial\theta^i}$ and $\partial^j:=\dfrac{\partial}{\partial\eta_j}$ then I will also say there is the coordinate transformation:
$$\partial^j=(\partial^j\theta^i)\partial_i\text{ and }\partial_i=(\partial_i\eta_j)\partial^j$$
So now I define:
$$\partial_i\psi = \eta_i$$
There's some Riemannian stuff going on in the background (namely, $\langle \partial_i,\partial^j\rangle = \delta_i^j$) that means that this $\psi$ is strictly convex to have solutions and equivalently there is a function $\partial^i\phi = \theta^i$ that has solutions. Let,
$$\phi = \theta^i\eta_j-\psi$$
Then we have that by the two previous assertions and the convexity of $\psi$:
$$\phi(q) = \max_{p\in S}{\theta^i(p)\eta_i(q)-\psi(p)}$$
$S$ is our manifold here really its just this convexity result that's throwing me off here.
Perhaps this belongs under analysis?
Obama Llama:
People recommend it to me as good or alright, jacobian and vodka told me that respectively and Fematika and other various people I’ve talked too have said it’s a great to good book for differential topology , so the general consensus is that it’s good. The pre reqs would be point set topology and an intro to manifold theory so differential geometry and undergraduate topology.
Does an injective sequence converge to every point in cofinite topology?
Yes
In mathematics, a cofinite subset of a set X is a subset A whose complement in X is a finite set. In other words, A contains all but finitely many elements of X. If the complement is not finite, but it is countable, then one says the set is cocountable.
These arise naturally ...
@gritty widget what you pasted was irrelevant
What does this have to do with limits of a sequence
^

The reason is because every open set will only exclude finitely many points, and the sequence will consist of infinitely many points, so all points in the sequence beyond a point would have to lie in the open set or else the set wouldn't be open (it excluded infinitely many points). Though the fact that it’s sequentially compact doesn’t matter, my bad. But to say that those properties are irrelevant is stupid, these properties define this specific topology and make it distinguishable from other topologies which are needed to prove that proposition @digital peak. The sequentially compact thing was a fault on my part, because I also can’t read, but those properties are pretty important for the proof,namely separation and overall compactness
🤔
If you try to show off please at least be correct
How am I not correct
I was literally trying to help and you decided to scrutinize and nitpick me to your fullest extent so I tried to be as precise as I could to explain my reasoning
You have been doing topology for like 4 days, and you’re the one who asked the question and now you act like you’re an expert
Please tell me how I am not correct
Even if someone is not an expert, it's easy to tell if a person is being unhelpful and trying to show off
Ik I said that
Read my thing
I said being sequentially compact is irrelevant
My bad, but he said all of what I sent was completely irrelevant
How
Your proof wouldn’t work if it wasn’t for those properties
next time someone asks me a question I’ll just throw a textbook at them
And be like
It’s in there somewhere
That's what I do sometimes, but I'm usually more specific @marsh forge
lmao
I'm like read these 2 chapters
The fact that the complement of an open set is finite and each closed set is finite
Here’s the definition
🐗
"separation and compactness are important for the proof"
The proof just follows from the definition
There is nothing to be said here
Just move on
Yeah tbh posting that sort of thing is a bit insulting
My bad for seeming insulting I sent that when I had just woke up, I should have elaborated, but @gritty widget did it for me, I’m sorry for that. However the fact that those properties are not relevant is ridiculous
Read what I said
You ignored my paragraph
Read it
Please read it
ITS WHAT distinguishes it from other topologies and it will obviously play into proving another property
You didn’t read it
Read
They are important, 2 properties on the list can help@prove that proposition
I do not see how you can just jump from this to
Actually I do see, however these properties still contribute, by just reading these properties you can conduct a proof
Your proof is fine
I never said it was flawed
Ik
I see now
But he said the wiki page is irrelevant
The definition?
I thought the reasoning was straight forward my bad
When I read the sequence thing I misread it as saying every sequence converges to every point
I can’t read
I said that
my mistake
Alright, we're done with this
if we visit a point infinitely many times it doesn't converge anywhere other than that point though 
I wonder what that says about the definition of convergence
@gritty widget by the way I already had a proof by the time I asked my question. It was more of a "huh" and to check whether my proof is correct
@digital peak this is why I don’t understand topological spaces
What does it even mean for a sequence to converge anymore
Wtf is a cofinite topology really
I don’t know any of this
convergence is kinda fucky in a non-hausdorff space
I don’t understand what the cofinite topology is supposed to morally represent
I'd rather not try to understand what every topology is supposed to "morally represent" ^^
The cofinite topology on the complex numbers is the same thing as the Zariski Topology on the affine complex line
But I doubt this really represents anything morraly in this case ^^
Yeah the way I see cofinite and cocountable topology is they are kind of zariski topology
It's not really a topology like in the classical case (open ball)
I think that's what he's referring to. Basicaly no real topologist works with non-hausdorff spaces lol
^
Classical more in the sense of topology generated by open balls in Rn and any space locally homeomorphic to it. Not saying no real topologist works with non-hausdorff space though. I don't know much about what real topologist do.
Now there is a subtle question of terminology. real topologist lol
real like real numbers or real like "really existing at a department where he's considered a topologist" 🍮
🍮 = :DD
Real like a dude recognized as topologist in some math dept of course. I'm physics major, the only time I set foot in math dept is when I need to go through there to get into physics dept. So dunno what a topologist or basically any real mathematician do
Could we eat donuts in a non-Hausdorff world?
Your mouth could not be separated from the donut in a non-housdorff world
Prove it
Any neighborhood around your mouth and any neighborhood around the donut must intersect
Therefore you cannot separate your mouth from the donut
Hmm maybe not quite
Having donuts in front of you, but can't eat it and can't get it away from you. That's like a punishment game
 sorry for being dirty physicist
sorry for being dirty physicist
Imma get out now
jk
Topological spaces are smooth manifolds, nothing else exists
And irreducible
Would donuts even exist?
We would have separable donuts and non-separable ones
Donuts and Munchkins
Maybe we are in a non-separable world
Refer to [30], thm 32
What if we could use a dense subset to work
everytime
Good bye non invertible matrices
Good bye real numbers
omg
😦
Let A be a subset of a metric (could be more general?) space E
A is dense in E if [...]
What if all math properties in E were the same in A?
at a point we could stop talking about E
and work only in A
Real numbers would not be a thing
Could we end up with empty sets only?
No
A problem is dense sets over a space aren't unique too
So no sets could even be properly defined iirc
I think aswell
K seems like nobody got my joke ...
Irreducible + Hausdorff = 1 pt space
Oh
That was a joke
lmao
Damn this shit is more interesting than i thought
Box and product apparently very different
Which one is the universal one wrt to the projections?
I always just use that one and forget which it actually is
Wait is direct sum different from disj union?
Basis is union of bases
I dont see any other natural way to form a topology
disjoint union and direct sum are both the Coproducts in the respective cat's
sometimes people refer to coproducts as direct sums
that gets confusing though so pls avoid doing that lol
any math god help pleb here esolve this
Can anybody help me wit this geometry question
By this definition of cone how do I solve this?


the Long Line\™ would be one such example, right?
seems so
so one topology exercise I have here is to show that in the line with two zeroes (that is, the quotient of ℝ×{0,1} with the relation (x,0)~(x,1) for x≠0) there exists no injective path between 0 and 0‘
I can’t really figure out how to write a rigorous argument. my reasoning is basically:
first I show that a path between 0 and 0‘ has to contain at least some other point x. this bit is alright I can do that formally.
then I want to show that if x is another point on the path, then there’s some point y between x and the zeroes that is passed through twice, by claiming that the “intervals” [x,0] and [x,0‘] (i.e. the images of [x,0]×0 and [x,0]×1 under the quotient map) are homeo to intervals and therefore the IVT applies, and both the path from 0 to x and from x to 0‘ must pass through another point y (which can be chosen to be, say, x/2)
but how do I make this argument formal, in particular the part about those segments being essentially intervals
throwing out one of the zeroes leaves you with a normal number line
the issue is, with continuous functions being as ugly as they are, can I even say without loss of generality that my path will start at 0, never pass through one of the zeroes again until it hits 0‘ and then stop?
I think if I can just argue that I can decompose the path into
0, a path on (0,x] with left limit 0, a path on (0‘,x] with right limit 0’ and then 0’
then the IVT bit works out since (0,x] and (0‘,x] are just straight up homeo to halfopen intervals
(yes I moved x to greater than the zeroes, doesn’t matter)
if it passes through one of the zeroes again it's not injective and you are done
…right
What? Never heard direct sum for arbitrary Coproducts lol
@marsh forge also.. I think ppl usually only use the \oplus sign when finite Coproducts actually are biproducts ^^
I can’t remember the context tbh
@MaxJ coproduct vs direct sum terminology
ah lol thx
No I mean I can’t remember where I read it
Might’ve been a shitty forum post for all I know
Or something I misunderstood when I first got started
how long is your code
You can send the code in #computing-software
Also
The problem might not because of math
Um you never used Theta
If theta is 0, then it should always make horizontal lines.
If theta is always 0, then I don't see that there is a problem
So I'm not sure what you're asking
I still don’t know what you mean by “theta of the robot”
And what is the line you’re trying to plot
Is it the heading of the robot?
What is the line then?
From from where to where
What do want to visualize from the line
Ugh
Gtg too
Good luck
Lmao
I am struggling with a problem: does exist a continuous surjective map $f:\mathbb{R}^2 \to \mathbb{R}^2$ which is not an homeomorphism and such that for every $p \in \mathbb{R}^2$ there exists an neighborhood $U$ of p such that $f:U \to f(U)$ Is an homeomorphism. Do you have any hints?
emme:
I think there are but I can't get a "pretty" example
think about the exponential map from C to C then modify it a little
(because it's not surjective)
I see, thank you for the hint.
does order topology generalize to a topology on a lattice?
seems like all you would need is some sort of associative and symmetric $\max, \min$ and then $(a, b) = {x \mid x = \max(a, x) \land x = \min(b, x)}$
mniip:
that should form a basis
unless you've got global max/min in which case you should add open rays
actually just use a subbasis of open rays
Can anyone help me out with a proof here
an open source textbook and reference work on algebraic geometry
I am not sure how they commute the direct image functor past the direct sum
This certainly doesn't hold in general, but I am assuming it is becasue $\mathcal{L}$ is an invertible sheaf and is globally generated by sections
Grothendieck:
Anyone online?
Hello. I have to show that $\mathbb{C} - \mathbb{Z}$ Is homeomorphic to $\mathbb{C} - \mathbb{N}$. Do you have any hints?
emme:
Well you want to find a function from the first to the second
So in some sense, you have to map the holes in the first one to the holes in the second
Thank you.
are those $\mathbb{C}\setminus\mathbb{Z}$ and $\mathbb{C}\setminus\mathbb{N}$? ive never seen a normal minus used for sets, thats all
euclid:
Yeah normal minus is common
Tbh I’d be surprised if there were an easy way to write down such a function
I don't think there is a nice function that does the job
spirals everywhere
How about finding their universal covers and if they are equal or homeo we show that their deck transformations are isomorphic.
preface= i dont know topology. Does the topology (induced by the metric of the norm) of every separable hilbert space have a countable Basis?
@gritty widget yes
thank you
@stoic tulip do you know if every borel prob measure in separable hilbert space is inner regular?
i don't know what a borel probability measure on a hilbert space is
how is it supposed to interact with the hilbert space structure?
just a measure defined on the borel sigma algebra
doesnt matter really but im asking because my proof uses the fact that the topology has a countable basis
ok it says this
Probability measures on the σ-algebra of Borel sets of any Polish space. This example not only generalizes the previous example, but includes many measures on non-locally compact spaces, such as Wiener measure on the space of real-valued continuous functions on the interval [0,1].
every separable banach space is polish
needless to say, no one answered my question
sto, you actually help people? wow
@gritty widget i don't understand your question
im not helping im asking for help lol
what's your definition of inner regular
is it with closed sets or with compact sets
if it's with closed sets, then it's obviously true
if it's with compact sets, then i'm pretty sure it's false
yes, so it's with compact sets
how is your argument in the OP proving this in any way
closed balls in infinite dim hilbert spaces aren't compact
ya
but
Probability measures on the σ-algebra of Borel sets of any Polish space. are radon
The measure m is called a Radon measure if it is inner regular, outer regular and locally finite.
@stoic tulip ok apparently some people use inner regular for closed and some fo compact
for closed its true
yes, for closed it's trivial
thank you
Does anyone know of any interesting reading about how the fundamental quandle of a knot relates to the fundamental quandles of its factors?
I've been thinking about it lately and have written some stuff that I found interesting about it, but I want to learn more if possible; it seems to me that it's sort of similar to a group product, kind of?
by the way, if anyone is interested, here are my notes on the subject. I apologize if they're difficult to follow, since it's basically just my stream of consciousness
Is (i) equivalent to saying that there exists M in R such that for any p and q in E, d(p, q)<M
Can you show that?
Triangle inequality
What is the motivation of using open cover and subcover to define compactness?
well, the idea is that the notion of compactness is generalized to arbitrary topological spaces
Heine already used a lemma similar to the modern definition of compactness to prove his theorem
and at some point the importance of that was recognized as a good (the best) way to generalize the notion of compactness
not sure if there is any good intuition
but there were a lot of alternative definitions used in history
it is not at all clear how to generalize compactness from metric spaces to arbitrary topological spaces
Oh ok
Well I can take it that this definition of compactness is for general metric space
the modern definition of compactness is just the most general and most powerful
you can also define it via filters though, which is maybe more intuitive
Ok
as it generalizes the notion of every sequence having a convergent subsequence
And what is the “thing” that we want to define when we define compactness on a general metric?
Ok
I guess I can say what kind of subset we want to define
in a metric space, you can just define compactness via "every sequence has a convergent subsequence"
the reason why we care about compact spaces is, that they are well behaved
continuous functions from compact spaces are bounded and attain their min/max and so on
epsilon delta works for any metric space
you can define continuity for any topological space
most general definition is the preimage of open sets is open
it's also often easier to check than epsilon-delta
For a subset of a metric space, is compactness equivalent to being closed and bounded?
Nope
Consider an infinite discrete space
(d(x,y) = 1)
The whole space is bounded, and it's closed in itself since duh
But points are open, so just let your open cover be "every point"
Oh
Ok that’s my second question 😀

{kind=link}
{kind=link}
{kind=link}
Intersection of compact sets
Any intersection of closed sets is closed
Compact sets are closed
So P is closed, and it's a subset of E_{8922} which is compact
^its basically dual of open sets, infinite union of open is open
just take the complement
nvm read it wrong
ugh finally proved $\overline{E^c}=(E^\circ)^c$
Whoever:
Are all metric spaces of R continuous
Yeah
Metric is the function and a set with a metric is the metric space
That’s right
Well, if your topology is induced by your metric
then the metric will be cont
but if you change the metric w/o changing the topology
I think you run into problems
What about metrics for R?
with what topology?
Well yeah
a function can only be continuous with respect to a topological space
that is a pair (X,T) of a set X and a topology T on X
Wait sorry, what definition of continuous do you know
The delta epsilon 😃
Lol but what is the general definition of continuity on a topology
the preimage of an open set is open
anyway, the order topology on R corresponds with the standard metric topology
so the delta-epsilon defn ends up being the same thing in a metric topology
Basically delta epsilon says that
getting close to y in the image
can be done by getting close to x in the domain
but "close to y" and "close to x" are exactly the metric topological notion of open sets
a metric is always continuous in the topology induced by itself
ugh seems unnecessarily complicated to me
my original question was
if you have a metric on R
that is a function d: R X R-> R
such that d(x,x)=0
d(x,y)>0 when x != y
d(x,y)=d(y,x)
and d(x,y)<= d(x,z)+d(z,y)
then this is a function with 2 inputs and 1 output
then by the usual definition continuity using delta and epsilon
is this function continuous
so this is more like an analysis question than a topology question
sure it is
Let $x = (x_1, x_2), y = (y_1, y_2)$ and let $d$ be a metric on $\bR$. Define a new metric $D$ on $\bR^2$ by:
[ D(x,y) = d(x_1, y_1) + d(x_2, y_2) ]
Using the $\varepsilon-\delta$ definition of continuity, for a given $\varepsilon > 0$ we set $\delta = \epsilon$. Then for $D(x,y) < \delta = \varepsilon$,
[
|d(x_1, x_2) - d(y_1, y_2)| \le d(x_1, y_1) + d(x_2, y_2) = D(x,y) < \varepsilon
]
and also we didn't use any nice properties of R so this should work for any metric space
well yeah
so you use a different topology
lol

i use a different metric on R^2 in which d is continuous
ah i see
so he was asking whether it was continuous in R^2_{euclidean}
lol
uhhhhh
idk what induced means here
but i guess it is not continuous
since
,tex d(p,q)=\begin{cases} 1&p\neq q\ 0&p=q\end{cases}
Whoever:
Compile Error! Click the  reaction for details. (You may edit your message)
reaction for details. (You may edit your message)
yeah
ik
i just didn't know what discrete metric is, and i'm just stating what you said again so to make sure i understood the right thing
well
i just did rudin
like 10 minutes before i asked the question
I did rudin chapter 2 questions
and one of the problem is to check whether that's a metric
but it didn't say the name of this metric
so I didn't know
lol