#geometry-and-trigonometry
1 messages · Page 177 of 1
Hence corresponding angles are equal too
then it is easy
ok, angle show a = b, when line g=h. then a/g = b/h so ah = bg and since h = g then a=b
"Chord EF is the perpendicular bisector of chord BC" does this mean that EF passes through the middle of BC
or does it only mean that the are orthogonal.
I've never done geometry in my life, but I self-studied up to real analysis and abstract algebra, AMA
gottem
Is the answer 9?
does RE cut the diagonals at their respective midpoint?
cause if they do, I have no idea how to show it
I think it does, you could show it by constructing similar right triangles with hypotenuses AI and AZ as well as DP and DT, respectively
ah yeah well if zevenate is right the answer is 9 yes
nice, I can't look up any answers for the question. So I wanted to make sure. Thank you @hard gale @errant ether
^^
@opal blaze that's from aops vol 1?
@rugged moat Why do you think geometry is useless after computers?
I write graphics programs and I have to use geometry all the time.
What is hard geometry, and why is it useless?
Are you saying because it's isomorphic to algebraic theories?

No worries. You just got me curious
@rugged moat me too


Do you think most of the problems on this server are homework problems? 😃
yeah
A previous problem looked pretty homework-y
Go go go!
If you're referring to my previous question, it's not homework
I just find contest maths especially fascinating, and I'm working through a relevant book with exercised
And when a friend or I can't solve them, I'll ask this discord.
@hollow edge My solution was something like: You let some the midpoint of PB be M', say, and reflect D about M' to D'. Then you angle chase, show that ABD'P is cyclic, and prove that D'DA is a straight line proving the condition
@eager pendant yes, do you have a answer sheet or something?
@thin wasp No, I was referring to https://cdn.discordapp.com/attachments/326138757474680852/473493630884118529/bd5151782586dc22057e972fc2531528.png

It literally says "EXERCISE". I forgot.
I thought maybe your problem was homework, but that would be pretty rough if you only had like two days
@tiny sphinx Yeah, that question was really simple. I just misunderstood what they were asking....
What’s wrong with homework questions @tiny sphinx
Is the answer 6(sqrt(2) - 1)
$$π(\frac{90}{360}-\frac{60}{360})×6^2$$
$$3π$$

you need to use special triangles
$$π$$

Yup
@rugged moat are you sure about that?
it asked for length....
Difference in legths
the answer is 6(sqrt(2) - 1)
The formula is 2πr×@/360
no need
Or just brute force it I guess
Yeah that is what I did
Guess that works
no need for fancy trig
tau/2 is an ugly solution
√2 is uglier
2(sqrt 2), I am asking because I don't have the option to check myself.
no, just confirmation
https://www.youtube.com/watch?v=pQa_tWZmlGs @hollow edge

A beautiful proof of why slicing a cone gives an ellipse. Thoughts on going sponsor-free (for those who missed it): https://www.patreon.com/posts/going-spons...
conic section thingie
ehhh
you may have already seen it lel

Introduction to the Line Integral Watch the next lesson: https://www.khanacademy.org/math/multivariable-calculus/line_integrals_topic/line_integrals/v/line-i...
Why did he have to put the small chang of ds
Into the pythag thm?
Couldnt he just have put it as dx instead?
Because if they are measuring infinitely small sections of tne curve, it woulnt matter in the end
Why wouldnt thet be the same?
because we are not just changing x, we are also moving in the y axis
and this entire thing is kinda informal
in order to be able to properly talk about stuff like dS, with intuition about the curve
one needs to do quite a lot of work
What should I study before co tinuimg with this?
it also can be done in different ways, some of those appeal more to intuition, but those are usually much, much harder
I would just recommend to find a more formal exposition
Ok
for example
there is an excellent textbook by Zorich, which has it formalised quite good
as for stuff more appealing to intuition
it really requires quite a number of prequisites to get right
do you know what a category is?
no problem)
I don't really like informal expositions like that video, so keep that in mind
Ok
@frank frost were you about to use category theory to explain the line integral
well, a) I don't understand it well myself
and b) I did not think somebody would ask :D
but I would try to paint a sketch and direct you to a book where you can read more
Sure
I am really good with category theory
If this uses ends and coends I will die oml
instead of building just one integral, one would want to build ALL the integrals, so we are building diff geometry as a whole basically
Oh yeah lol
Work in category of manifolds
Use a dum category theoretical construct to get integrals?
well, not quite, this one is more geometric in it's approach
and also synthetic: one introduces multiple axioms for geometry, which make it possible to build infinitesimal analysis on "smooth objects"
Alright
the resulting geometry is non-euclidean (it's possible to have multiple distinct lines between 2 points)
Link me the book?
I was too lazy to google the thing so I just uploaded it 😄
the second part is more categorical, the first one thinks more in terms of "sets", but has more category theory then I could handle
rigorously everything is formulated in terms of categories
honestly I think it's the only book on diff geometry I might actually finish, just because of it's immense appeal to intuition
I found this definition on wiki: In the mathematical field of topology, a homeomorphism or topological isomorphism or bi continuous function is a continuous function between topological spaces that has a continuous inverse function
what exactly should I imagine that inverse function to look like? I understand that the mapping needs to be continuous but how would two spaces have continuous mapping without the inverse function being continouos?
Are you sure that last statement is correct? You contradicted the definition
The inverse function is continuous
8*sqrt(3)
@opal blaze I got 1/2 for 173, 3/2 for 174, and 32 for 178
@shut ridge it's perfectly possible to have a mapping be continuous and have it's inverse not be continuous
easiest way to see this is to look at the definition of continuity (preimages of open sets are open) and then let the domain have the discrete topology and the target have the chaotic topology. Then all maps will usually have this property
as a more concrete example, consider the map from angles in [0,2pi) to the unit circle. this map is continuous, but it's inverse isn't (consider neighbourhoods of the image of 0)
So at what point does geometry turn into topology? The line seems blurred to me
yh it's blurred
i would say geometry turns into topology when you start talking about things which are invariant under homeomorphisms or something
Yes. Usually less rigidity is an easier way of looking at it
So invariance under homeomorphisms you can look at it from the fundamental group perspective or just look at that homotopically
topology is just anything you can get with just topologies and topological spaces
if you have an atlas, it's not really topology anymore
Then that gets a bit circular for someone unfamiliar
thanks for explaining :)
You need to find the radius of the circumcircle
I'm very slow with math pls explain
because x is the refence angle that would make 6 the opposite side and 19 would be the hypotenuse
yes and how do i solve x then
SOHCAHTOA
What sides do you have?
hypotenuse and op angle
Hence, what relation should you use?
sin
Okie dokie
So what's the relationship?
uhhhhh
wdym
sin(x) = ?
6sin19??
Wat
SOHCAHTOA
Sine of the angle is equal to the ratio between the opposite and the hypotenuse.
sin(6)=19?
What's the angle in the diagram?
90
Is that the one we're trying to find?
no
So what angle are we trying to find?
A lol
okie dokie
What other information do we have
Relative to A?
it's an approximation
...?
Of what
that question looks like it is asking for the approximate measure of angle x
of x
^^
Small-angle approximation smh
But still, the ratio is important
Since the relationship that you are intending to use is
x ~ sin(x)
pao think about it this way. S=O/H, C=A/H, T=O/A. that helped me
so i would use sine then, right?
6
and whats the hypotenuse
19
So the sine of theta is 6/19
do you know where the sin to the power of -1 is on your calculator?
i do but im using a digital calculator cus i dont have one rn :/
does your digital calculator have one?
i'm using the google calc and it has sin
does it have a 2nd button?
Inv ? In?
charge it
is there a way to do it without it tho
and make sure to set your calculator to degree mode for trig
so on a TI 84 you would press 2nd -> sin -> Opposite -> Division symbol -> hypotenuse -> ) -> Enter
ok i'll be back
take a screenshot of what i just said
i got 18.40848017
that is correct, and what is that simplified
18
it says round to the nearest degree
yup i got it thx
yeah, it seems to be asking for a whole number so yeah that is probably it
and your welcome, always happy to explain concepts
Is anybody here interested in quantum topology/ khovanov homology/ categorification?
Ask any question you may have
i think that may have been the question lolol
no one is interested in any of those
Lolol
I'm a PhD student working in this area. Nobody else in my school is super interested in this stuff besides my advisor (and the rep theory people, but they take different approaches)
So if anybody knows about this stuff, I'd love to chat
It sounds way fancier than it actually is
these researchers are watching way too much tv
We really have too much time on our hands
I wrote a short and incredibly vague overview here https://www.reddit.com/r/math/comments/95x6ve/khovanov_homology_and_related_topics/
reddit
Hello math community. Is there anybody here who is interested in Khovanov homology, categorification of skein modules, and things like this? I'm a...
I’m interested
I suck though
So as a first dumb question; why are they often called quantum invariants (the invariants for links and stuff)
I think there was one that sprung up from path integrals in chern-simons theory or somethjng
But apart from that I’m not sure what’s deserving of the ‘quantum’ tag
You know, I'm not sure. I think it's due to the connection with TQFT (topological quantum field theory) which started out in physics and then the math people came and fixed the physicists' mess
Yep just like you said
Hmm ok; I know they often tag on ‘quantum’ in a lot of geometrical setting whenever you have noncommutative stuff going on I think (eg in noncommutative geometry) but I wasn’t sure where the ‘noncommutativity’ was arising in the study of knots
Er another dumb question so what’s categorification got to do with knots lol
I was thinking the other day of forming a category with knots as objects; and morphisms as (maybe) homotopies between the knots when they are embedded in 4D instead of the usual 3 (since nonequivalent knots can’t be homotoped to each other in 3 by def n.) but after a while that sounded like a dumb idea
And I’m sure that this ‘categorification’ you speak of is completely different lol
There are plenty of "quantized" algebra things here where you force multiplication to commute up to a power of some indeterminate. Somehow this is important in hardcore algebra but I don't know much about this. There is a way to build noncommutative algebraic objects from link diagrams (cluster algebras) and this has caught some steam
Nope it's pretty much what you suggest
More realistically the maps are cobordisms. So no not everything is isomorphic
Yea but your idea isn't crazy, this works but unfortunately it doesn't work super well
A cobordism between links in 4-space will induce a map on homology but it's only defined up to +/- 1
There are ways to fix this sign issue but there is subtle
Hmm nice at least it’s good to know about this category!
Are there any problems you’re thinking about in this field?
Yep if you're interested Bar-Natan has an paper that's super readable and will probably answer a lot of your questions
I'm looking at a few problems but one in particular is how do all these cluster algebra things fit into the older categorification models
I'm still a little new to the general math game but this sounds quite interesting
It's fun!
My immediate question would be, what is the Euler characteristic of a graded module? Is it (-1)^n rank of the nth guy?
It's a Laurent polynomial x^n dim(A_n)
Ah so this is graded both sides
It's useful bc you need to shift the gradings around
Yes it's graded in homology and then again each module is graded
This is sometimes called Poincare polynomial
Yo anyone here
nope
Hello
d is the length of the entire left line. D is the length of the line from the tip of the cone to the disk. The author says "We can quickly find how R and D relate to r and d by applying Pythagoras theorem twice after noting that the radius of the disk line intersects the sphere position line in ninety degrees."
I don't follow. I think something else must be used like the law of cosines.
(d-D)²+R²=r²
R²+D²=H²
H²+r²=d²
Where H is the length from the cone vertex, to the vertex between R and r
then
R²+D²+r²=d²
R²=d²-D²-r²
R²=r²-(d-D)²=r²-d²-D²+2dD
hmm
if we subtract these, we get
0
=R²-R²
= (r²-d²-D²+2dD) - (d²-D²-r²)
= 2r²-2d²+2dD
r²=d²-dD
hmmm
well what do the equations that are supposed to occur look like when we square em
R=(r/d)√(d²-r²)
R²=r²(d²-r²)/d² = r²-(r⁴/d²)
the thing is, this formula for R doesn't involve D, but mine does
so maybe I shoulda cancelled out D instead
D²=d²-r-R²
D²=2dD+r²-d²-R²
hmm
ya this is pretty weird
Hi, i had a question about this, in the box it says that P is clearly Compact, How can we prove that?
Intersection of compact sets
is intersection of compact sets always compact, even in non haussdorf spaces?
Not automatically, it uses the fact that compact sets are closed
yeah i figured thats what you had to assume
Yep, closedness
Topology isn't restricted to 3D, and I dunno how you make sense of an "infinitesimal shape"
Topology is the study of spaces where it makes sense to think about continuous functions
I thought so, that's why I asked xd
Im having some troubles with expressing trigonometric functions as a positive acute angle

I have no idea where to even start with this. Just by fooling around I found if I subtract 180 it is often the answer but you have the negative sign. I dont know if there is a formula or what
but even when I google it I can seem to find a clear answer
if it's in the second quadrant, substract it from 180
third: subtract 180 from it
fourth, substract 270 from it
and one is just itself then
although you have to be careful of the signs
sin(x) if x is in the fourth quadrant is negative
same for third quadrant
right I remember quadrant 1 is all positive
2 sin is positive
3 tan is positive and 4 cos is positive
top qudrants are positive ( because they're above the x axis) and bottom quadrants are neg
so cos 220 would be -40
memorize it like this instead:
sin is the y coordinate, the y coordinate is how much up you are so if you're in the top quadrants then it's pos and if you're in the bottom then it's negative
yep
okay thanks
no problem

has anyone read "plane euclidean geometry" by a.d. gardiner and c.j. bradley?
is it good? I can't find a sample/pdf online
I'm currently reading it, it's pretty good imo
it contains a lot of theory and problems
some of which are quite challenging
are there any ukmt books you've been through in the past / you'd recommend?
I've been through the olympiad primer, I don't know if I'd recommend it though
the theory in that is somewhat shallow, understandably, because it's aimed at BMO1
the problems in it can all be found online because they're past BMO1 problems, the best thing about it is the solutions for the problems which generally aren't available online
I'm not sure if I'd recommend it just for that though, because I'd say you tend to get more out of the problems the less help from something like that you use
I have the BMO2 equivalent but I haven't really been through it much
so I couldn't comment on it for that
the only other UKMT book I have is the new problems in euclidean geometry
they seem like very good problems, they're quite challenging
alright, thank you
i was looking through a Geometry book i had, it says that its impossible to trisect an angle
by construcking
constructing*
that's true ^
here's a proof: https://terrytao.wordpress.com/2011/08/10/a-geometric-proof-of-the-impossibility-of-angle-trisection-by-straightedge-and-compass/
One of the most well known problems from ancient Greek mathematics was that of trisecting an angle by straightedge and compass, which was eventually proven impossible in 1837 by Pierre Wantzel, usi…
which part exactly
all of that :/
he's basically just saying we'll draw a circle at the origin on euclidean 2 space
aka normal cartesian plane
that's euclidean 2 space
set of all pairs of real numbers
oh
2 dimensions basically
alright
Hi guys, can someone please explain quaternions to me?
if this is off topic, please tell me what topic they fall into
I mean, I can google the formulas, but I need really understand WHY they work. otherwise I'll never remember them or be able to use em effectively.
yep
so i have this definition
q = w + xi + yj + zk
i know i, j, k are the "imaginary" component
from knowing basic complex number like 4 + 5i
where 4 lies along the x axis and 5 is the magnitude of the perpendixular component, right?
so I have that basic 2d intuition from those complex numbers
but then the space in between is just empty
looking for some intuition here
here this is probably the best thing I've ever watched explaining quaternions

If you like this video please consider buying the DVD: http://www.blender3d.org/e-shop/product_info_n.php?products_id=146 Quaternion Rotation The entire cont...
we can talk about it after that if you're still having questions since you probably will
k watched it
@upper karma so actually that brings up a question about euler angles
he says teh order of the axes doesnt matter
so in other words, if you compose a 3D rotation by multiplying 3 rotation matrices
it doesnt matter what order u multiply em in, correct?
no, generically speaking if you multiply 3D rotation matrices the order matters
take two dice or some kind of object
bc order DOES matter in some cases
like imagine z is up, x goes into teh screen, and y is right
and imagine a jar w the label facing you alligned w the Z acis
axis
yep, I'm agreeing with you that order matters
but... it seems like tehre are cases where it DOESNT matter
I cant figure out which is true
for rotation matrices specifically
I thought you just rotate em in any order and they concatenate to the same total rotation
rotate 180 degrees on x and rotate 180 degrees on y
order doesn't matter
haha idk if that's what you are asking
ok, following my example
ahhh I see what you're saying
rotate the jar 180 on Z so teh label faces away from you
yes what you're talking about is orientation
if you're rotating a vector
or moving a single point
then tlt it along the x, the then "pitch" it toward you along the Y
so now it's kindof tilted toward you w teh label facing away
but if you rotated it around X and/or Y, THEN Z
the Z rotation will result in it "swinging"
instead of "rolling" around its own axis
which equals a totally different transformation
yes, if you see the bottom of the jar at the origin and the top of the jar as a point, then if oyu rotate it arond the z axis first, that rotation does nothing
but if oyu rotate it around the X or Y first, THEN the Z, then the Z will effectively translate it
so totally different
like, what am I missing here?
I'm not sure cause I am not entirely inside your mind but
am I confusing an object centered at the origin w a VECTOR radiating out from the origin?
when you multiply matrices you're getting the end result of a lot of transformations combined in succession yeah
I don't know, possibly, I think you might be thinking about the orientation
vectors don't have an orientation themselves
like you can spin around in an office chair
a vector looks identical when you spin it on its axis
if a jar is in the same location as the vector though, it will get moved around right
so you need to think of all the vectors of all the positions of particles in your object being rotated instead of just one vector
that's my guess
as to what you're confused about, idk
if you have a monopoly game or yahtzee or somet dice lying around
get them out and rotate them in different ways or something
idk if that will help haha
like do the same transformations in opposite order or
so you's saying a jar is not a discrete point, it's mesh of vertices, so it's a different situation
gotta think of each vertex in isolation
yeah thats what Ive been doing
well you might think of the jar as being just like


but it's more like this
so rotating it aorund the z-axis might appear to not be moving anything
but really all these points are, just I think a jar might not be the best example because it's spherically symmetric
ya I see ur point
thats why I said it has a label that is facing you
so we can keep track of if it turns around
I said spherically I meant cylindrically symmetric sorry
oh ok
yeah so I guess since we can't label the side of a vector that's annoying but
yeah so the crazy thing is, Pavel Grinfeld says that an euler matrix is teh combination of Z, X, and Z
NOT Z, X, and Y
which is like wtf

https://bit.ly/PG_Patreon - Help me make these videos by supporting me on Patreon! https://lem.ma/LA - Linear Algebra on Lemma https://lem.ma/prep - Complete...
haha at which time stamp
hold on
wrong one
https://bit.ly/PG_Patreon - Help me make these videos by supporting me on Patreon! https://lem.ma/LA - Linear Algebra on Lemma https://lem.ma/prep - Complete...
on the board it looks like he has Rx,Ry, Rz
skip to around 1:00
maybe he just misspoke
i dont think so
he never uses the 3rd axis
he "twists" it around Z, then tilts it around Y, then after it gets tilted, rotating it around Z takes on a new meaning, so he "swings" it around Z once again
it's really fucking w me
oh ok
that's because after each transformation you're looking at everything from a new perspective
let me think of a nice way to explain this
probably best to draw a picture of some kind
actually here's something to help you visualize it

if you multiply this by the column vector (x,0,0)^T
that gets you exactly where the x axis ends up
so what you can do is now set all the angles = 0 except the first z rotation
then after you are comfy with that, maybe fix it and try to wiggle the next angle
and just sorta see what each part does on its own
then repeat for the y and z although you'll probably start to see the trend
sorry, I dont know what this picture means
is this the concatenation of the three elementary rotation matrices?
my intuitive understanding is that w euler angles, each axis of rotation is "nested" inside another
so each subsequent one becomes relative to the other
yeah, he mustve made a mistake by using Z twice in that video
why would he discard a whole axis, when euler angles are clearly expressed in X,Y,Z values? that makes absolutely no sense
damn, when you think about it, his point does make sense
Im guessing maybe, it's because he started his "vector" pointing up along the vertical axis
In Unreal 4, I'm using to working w a coordinate system where x points into the screen, Y points right, and Z points up
and the forward vector of the actor point along that X axis
so naturally, you would first rotate around the X axis to get teh roll, then pitch around the Y axis, the yaw around the Z axis
@upper karma so I guess it really matters which axis your forward vector starts out alligned to
whichever axis it is alligned to to begin with, you'd better get your rolling out of teh way first
he makes it confusing by making talking about roll like "twist" and making it vertical
ahh sorry I was distracted and I still am but I'll come back later
its okay
just read the message I sent when u get the chance
its a really subtle thing
basically it's about which axis you define to be the "roll" axis. to me, the convention Pavel presents is really bad, because what's the use of a "twist" if it's vertical. it makes much more sense to think of a forward vector lying down horizontally, rolling that first, then moving it into proper lattitude and longitude positions
ahhh I see what you're talking about, yeah
I guess he's more theoretical and a mathematician he doesn't really care since he just needs them to represent the objects in his mind or something like that
I went through his tensor calculus lectures several years ago, and I liked those but I guess at the end of the day it does just boil down to convention and he's just working on different stuff
Nah he's amazing
In general for understanding linear algebra
But juat this one point us impractical hehe
Btw
this formula for SLERP seems weird
I kinda understand why sin would need to be in there, because otherwise the interpolation btwen the 2 points would take a "shortcut", and not follow the path of the circle of rotation
however, look at the formula
dont the sin thetas on top and bottom just cancel out?
I guess it's sin(theta(1-t)), just look at the theta*t on the second part
ohh, he's decomposing the quaternion at time t into its component that lies along the starting quaternion q1 and the ending quaternion q2 and adding those components together
so that's basically how interpolation works I guess, blending between two "poles" with an alpha value, which in this case is time t
I was thinking about conics earlier today and had an idea
so an ellipse you can trace out with a loops of string and two pins in a board
what if you imagine a kind of material that has constant surface area constantly, and there are now 3 fixed "foci" instead of 2 and you use one extra free point to stretch it out tight and use that to define a surface
what would this shape be?
😮
What, like you have three pins in a board, and a string around them?
i guess three pins in a space, and like a cloth i guess in between the three
and then the 4th spot is kind of pushed out of the plane the 3 points occupy
making three triangles (excluding the triangle formed in the plane the three pins are) whose areas have a constant sum i guess
yeah it's a fictional cloth
it's basically like a 2D string instead of 1D string in a sense
so you will always have a little tetrahedron
except in the cases when it happens to lie in the same plane as the three points
ye
im curious
my first idea would be to try to make the outside edge of this shape where the cloth is still on the same plane
like
ehh
how to word
I am trying to figure out how to make it in some 3D software I'm trying to learn
so it's a good exercise
there's a isosurface node, so I'm thinking I'll make it by defining the 3 points and then making the magnitude of the 4 sides equal a constant, and see what it graphs me
I forgot how to do 5i
Can someone show me hoe
How*
My greatest issue is the cos 90-x part
@hard gale explain it pls
Wait
OH
Nvm you don't need to explain it
I think I get it now
Wait can you explain for tangent
Which is 5 ii
Oh yea
that's more for iii but eh
$$\tan(x) = \frac{\sin(x)}{\cos(x)}$$
Right
I wondered if you can calculate line-sphere (as an example) intersection in a non-euclidean space as example on a sphere, without converting to euclidean space on the way? (I have no real knowledge of this topic, so sorry if that question is dumb)
Copied from questions-1: Is there anyone who is well versed in the topic of Geometry and Topology? When it comes to Vertices, Edges, Faces, Meshes, 3 Dimensional Coordinates and UV Mapping as in 3D Modelling? I need a very complex formula.
I need a formula that can create Seams on any Mesh so that the resulting UV Layout will have 1 Island and no overlapping parts.
I'll probably rather ask in the 3d modelling community
Hi can someone help me understand this problem because im having a bad time trying to understand this bc i suck at math 
is there a specific part you don't get? @upper karma
question 2 because i dont understand what they mean by " drawing diagonals from one vertex only"
it's like the diagram
you pick one point
and draw all lines connecting to other points
notice how all the lines are coming from A in the diagram
(A = one vertex only)
Oh so technically when drawing the lines it just has to be all coming from one vertex? i think i got it
yup
vector as = 2(vector sc). how to i write vector es as a product of only vector ad and vector ab
(this is just a part of my task, the full task i to find the ratio of de and ec)
Can someone walk me through this problem? I know it seems very basic but this is just something extra.
Okay so notice that they are vertical angles
So you can set the two pairs equal to each other
4y=y+x+10
And then you also have the two supplementary angles
So 4y+2x=180
Now you can do your soe
yes
@upper karma Pls leik if u agree
Hey guys
I'm taking a class in Geometry and Algebraic Topology
and I was curious as to whether or not you could provide some intuition to what the 'Holomorphic 1-Forms' are on a Riemann surface
The class coordinator has been following Foster's lectures on Riemann surfaces but after the second week she skipped like 200 pages and jumped straight into the section on vector bundles
so I don't really have much intuition on the topics we've been covering
I only just read upward in this chat and well
I think this sort of question doesn't belong here sorry
i'd say this belongs here, just because other questions are simpler, it doesn't mean that your question doesn't belong here
Oh well that's good to hear
@keen bison Do you have intuition for what 1-forms on an ordinary smooth manifold are? Or are you asking specifically for intuition for the holomorphic condition?
No I have no intuition at all regarding those things
Basically, a 1-form is something which allows you to do line integrals on a manifold. In general, you can think of k-forms as the things which allow us integrate over k-submanifolds.
So, since Riemann surfaces are locally modeled with a complex structure, it is natural to consider 1-forms which are holomorphic (as opposed to just smooth).
This means doing line integrals along such forms shares (at least locally) many of the wonderful properties of complex integration.
In general, differential forms are very interesting algebraically. They have an operator called the exterior derivative d which takes k-forms to (k+1)-forms. This geometric picture of integrating by Stokes' Theorem: if omega is a k-form and M is a orientable (k+1)-manifold, then we have that $$\int_M d\omega = \int_{\partial M} \omega$$
By De Rham's theorem, algebraically studying how the of the vector space of k-forms relate by the exterior derivative is the actually the same as computing the singular cohomology (with real coefficients) of our space.
Holomorphic 1-forms \omega have some cool algebraic properties. First, is that they are always closed, i.e., d \omega = 0. This follows from the Cauchy-Riemann equations. The Poincare lemma then tells us that locally \omega is exact, i.e., \omega = dg for some function g locally. But moreover, one can show that his g must be holomorphic.
Another cool algebraic property is that the dimension of the complex vector space of of holomorphic 1-forms on a Riemann surface is equal to the genus of the surface. By contrast, the vector space of ordinary 1-forms is infinite dimensional.
@keen bison I have to go. Hopefully this helps. If you have any questions, I should be able to answer them later.
nice
woah
the genus determines a riemann surface topologically so probably a lot
Could someone help me with this?
@thick portal I think this might be from your AIMO as well
I know the answer but I don't know how to get there
<@&286206848099549185>
^ I got the answer, never mind.
I have all the answers, but I don't know how to get them for angles 4, 6, 7, 8, 9, 10, 11, and 12
I've been stuck on this problem for so long and I need some help
yes
yea
ye
if you know arc GE 9 is half of that p sure
why is angle 5 not 75
i literally cant see whats written for real and whats not
Hey could you guys help me with this problem?
what have you tried
I got several answers
good
So what I did was counted the cubes as like corners
So each side would have a 2x2
For the corner
And that would be 4 2x2’s
*6
So 24
And then I had another approach of counting the edges corners and the middle pieces
hmm the corner thing seems suspicious to me
I don't get where you're getting the 2x2 thing from
there are 8 corners I agree
Like I think the problem is asking for how many cubes are there
yep
Like a trick type of problem
how do you normally find area of a grid?
Instead of just counting 9*6

for instance how many squares are in this picture?
you can count them right, but there's a faster way yeah
Oh 12
not trying to be fancy here, just the 2D version of your problem basically
ok so how'd you solve that to get 12
right so for your shape you have how many layers of 3x3 cubes?
6?
3


since you know how to find one layer, it's just like finding the area, 3x3
but now you have 3 of these stacked up
that's how I think of it
yep
That’s it wow cool
yeah not too bad
Thank you
in fact if each cube was measured to be a cubic inch of volume
then you'd have exactly 27 cubic inches
since the shape it came from was 3in x 3in x 3in
=27 in^3
So all you had to do was find the volume of the cube
I don't know if that makes it more clear or not but this is literally counting the volume yeah
yep yep
So there aren’t like hidden cubes within the cube xD
nah lol
there could be in more complicated problems but it's not possible to stack cubes to the top like that and leave a hole inside
Cool thanks
yeah np
@sly crane Hey thanks man! That was really helpful
hey
sorry
for this kind of question
i should make 2 equations
and make them equal each other right

So, exercise from Hatcher 1.1. Show that Borsuk-Ulam applies to the 2-torus. Ie. any continuous function, pair of antipodal points, blah blah blah.
A brainlet answer here might be to just say "hey, this works for S1 and since S1^2 is just a product topology of S1 it follows that Borsuck-Ulam applies component wise to each of the S1s, so S1^2 has an extension of Borsuk-Ulam". Is there any more intelligent/rigorous of a way to do this without effectively recreating the proof of Borsuk-Ulam for S1 provided in Hatcher?
your argument doesn't work. maps T -> R^2 (where T is the torus) don't necessary decompose as a product of two maps S^1 -> R.
and actually, Borsuk-Ulam does not work for the torus
Turns out the exercise was asking whether it holds. He had his question answered elsewhere: it doesn't
Given that you can't cut a square up into an odd number of triangles of all equal area, can you cut up this 3x3 square without a 1x1 center square into an odd number of triangles of all equal area?

Can someone help me with his question?
You have that
4y + 4x - 10 = 90
8x + 3 + 6y - 1 = 180
That's a system of two equations with two unknowns, know how to solve?
not really
Simplfy:
4x + 4y = 100
8x + 6y = 178
Multiply the first equation by 2:
8x + 8y = 200
8x + 6y = 178
Subtract downward:
2y = 22
y = 11
Solve either for x:
x = 14
thx so much
Note it does not bisect. Very close though
ok
How do I finish this?
3y + 9x = 82
9x = 82 - 3y
x = (82 - 3y)/9
solve through substitution
so you see what he did was he moved all the x terms to the left
then simplified them and found x in terms of y
Ya I got it but I have another question
Go for it
Do I divid by -1?
The first line should actually read
90 < 22 - x < 180
You can also multiply by -1. Note that multiplying by a negative will flip inequalities, so you have:
-158 < x < - 68
anyone good with rectifying planes nonzero unit speed curves?
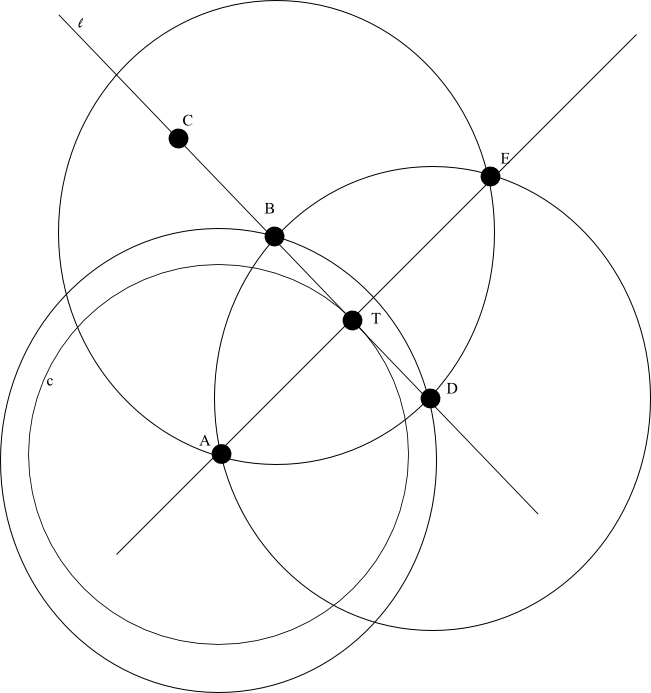
Hey, guys. I apologize if this isn't the appropriate channel for this problem. I'll give some more information on the specifics.
I need to find the vector X
Only known information is Vector(A), Vector(B), and the radii of the circles.

{kind=link}
{kind=link}
{kind=link}
hm
Well
The good news is that there are only two possible positions of X with just your information alone
Yes, I can eliminate the other one
So ye
I need the formula 😉
Yes
Tbh, someone might pen it up for you
But the effective process is that you'd start with a center
You then know that you need a circle constrained between the inner most and outermost ring. It follows that only two possible circles with this constraint intersect B
From here, you get two centers
Idk how you can eliminate one of those as I haven't thought that far ahead yet.
Then you have an algorithmic plan
I don't see how this translates into a function
Yeah, you're on your own there. But this'll be a process with a function
I mean, I have the answer, the straight formula. Just have to dig through some old code. I just want to understand the numbers rather than for the function to just work
Well that's the reasoning
Perhaps if I "rephrase" the question
Imagine AB and BC as "limbs"
With A being the hip joint and B being the knee joint
How then, do you move C (Then being the foot in this euphamism) such that it reaches the position of the target?
We can see the first step being rotating B around A so that it's distance to the target is equal to BC's distance
By limiting the angle of ABC between 0 and 90, we can eliminate one of the two possible positions
Then we simply rotate C around B so it reaches it's target
Now
The problem is in the first step, how do we know by how much should we rotate B around A?
hi
if you don't mind a geometrical solution
draw a circle centered at the target with the same radius as the circle centered at B
the intersection with the circle that is the locus of B is where B should be
if you like, you want the intersection of the points that are the length of the shin from the target and the points that the knee joint can be at
then create a function from that...
^
you have two circles which you have the equation of, you can solve to find their intersection(s)
Alright, will do. Thanks
which part is it that is giving you trouble, the area of the trapezoid on the bottom?
for anyone with topology experience, i have a noob question:
sorry for small picture, but my understanding is that deMorgan's laws would produce the opposite statement
so i'm having trouble figuring out what is special about R^n that would make this the case
Let A and B be closed sets. Then A', B' (which I'll let be the complements) are open.
We know that A' ∩ B' is open by definition. So (A' ∩ B')' is closed
And I believe there's no "countable" condition on intersections
That means A ∪ B is closed by DeMorgan
@upper karma
Nothing special about Rⁿ here, this is generally true
yeah that's the problem I was having; because the question seems to imply the opposite case
i emailed him asking if its a type-o
Nope! I got it backwards. You can only intersect finitely many open sets
So you can only union finitely many closed sets by the logic above
i understood what you meant as this was the logic I was using as well
i'm just going to wait for his reply for now
thanks for the help!
Agreed, I think he got it backwards w
As well. Good luck!
Hey can anyone prove that a set in which every infinite subset contains a limit point is compact. The converse is really easy, but I'm having a lot of trouble proving Weierstrass property => compactness
I'm thinking maybe I do a contradiction and assume that the set isn't compact, and thus has some open cover without a finite subcover, but i don't know how to connect that to the limit point concept in order to show that it conflicts.
@serene dirge have you figured it out yet or no?
I guess I'll just rant anyway and if it's useful it's useful. So, it'll be easier for me to phrase this in terms of sequences
I'll start by saying it should be more or less clear that "Every infinite subset has a limit point" <=> "Every sequence has a convergent subsequence"
Yea, that's the equivalent statement of the B.W theorem'
Go on!
(In a nice way, not an aggressive one haha)
Yeah for sure
I'm thinking it might be worthwhile to throw in the stuff about complete + totally bounded?
That feels like a nice intermediate that could help prove it
(I've seen the proof some time ago but don't remember how it goes so I'm kinda feeling it out, do bear with me if I'm at all slow/scattered)
So, sequential compactness obviously implies completeness, because if you're Cauchy and have a convergent subsequence, you converge
Oh btw, just to be clear, I'm using the equivalence class of cauchy sequence approach to our fields, and not the dedekind cut approach. Just in case that's relevant.
Right
It won't be relevant, as long as you have some field satisfying the axioms you're good
Alrighty. Never hurts to clarify though.
Okay so assume you're not totally bounded, meaning there's some real number epsilon > 0 such that you can't cover your space with balls of radius epsilon
Ok so we are doing contradiction then?
Uh, for this intermediate step yeah
I don't really tend to worry too much about whether a proof is by contradiction or contrapositive and all, I just kinda roll with the logic 😛
Totally, I wasn't criticizing at all! Sorry I'm like, hypercaffenated right now, so I'm feeling very inquisitive.
So yeah, if you're not totally bounded, take an epsilon such that you can't cover the space with finitely many epsilon-balls. Take a point x_1, take a ball around it of radius epsilon. Take x_2 outside that ball, cover that in a ball of radius epsilon. Keep going
This process never terminates, since you can't cover the space with finitely many balls. So this gives us a sequence
But there's not even a Cauchy subsequence because for any i and j, d(x_i,x_j) > epsilon
So if you're sequentially compact, then you're complete and totally bounded
Ooh right, and then just choose epsilon as the minimum ball we picked for our x's and we violate the cauchy criterion.
Hence contradicting the notion that there exists a convergent sequ... actually hold on
Well, I chose the same epsilon for each
Like, I fix epsilon. Then I take B_epsilon(x_1). Then choose x_2, then take B_epsilon(x_2). And so on
Oh, ok I see.
So our neighborhoods aren't necessarily disjoint though right?
We're only ensuring that the x's lie outside of each others balls.
Yeah exactly, the neighborhoods aren't disjoint, but the x's themselves are at least epsilon from each other because the centers never overlap
Makes sense?
Yep
So now it suffices to show that complete + totally bounded implies compact
For what it's worth this feels like it's gonna be by contradiction
Actually I'm not even 100% sure if this intermediate step is needed, we'll see
So let's say you have an open cover with no finite subcover
And a sequence {x_n} in the set, presumably
We just need to show that for any generic sequence, the fact that we don't have a finite subcover is inhibitory to convergence.
Ohhhh
Okay so there are a bunch of problems in Rudin about this, I think you need to use a base for the space
Let me pull it up, I think I was assigned those problems in analysis
Okay so
Let's say you have a metric space
If you give me a bunch of open sets V_alpha, that's called a base if every open set is a union of some of them
Now, a metric space is separable if it has a countable dense subset
Separable metric spaces have countable bases, because you take the countable dense subset and take the epsilon balls for epsilon rational
Now, if every infinite subset of a metric space has a limit point, it's separable
The reason is that it's totally bounded, as proven above. Choose a (finite) cover of the space of balls of radius 1/n. Take the centers, keep going. That's a countable dense subset
So, you know spaces where infinite subsets have limit points have countable bases. So now you take an open cover, you can find a countable subcover. How? Take the countable base, G_1, G_2,...
Choose an open set in the cover containing G_1. Then choose an open set in the cover containing G_2. etc
So now assume your countable subcover, let's say {O_1,...}
Doesn't have a finite subcover
Let F_n be the complement of O_1 \cup ... \cup O_n
Then F_n is not empty for any n, but the intersection of the F_n is empty
But now choose x_i \in F_i
And I think the point is this is gonna be infinite, has a limit point, but that'd be in the intersection of the F_n, which is not empty, so rip
Anyway gotta go, but hope this helped @serene dirge. Sorry to rush out
Hello, I am looking for help with projecting 3D figures onto a 2D plane using a 2D game engine. I've done a fair bit of research and nothing really helps...
Figures as in, an array of vectors.
Projecting a vector onto the normal of the plane then subtracting the resultant projection from the original vector should give you the portion of the vector lying on the plane
(im trying to understand what you just said)
So you have a set of vectors, each of which you want to project onto a plane, right? Each plane has a unique normal vector determined by its coefficients; for a plane ax + by + cz = d, the normal vector n is <a, b, c>. For your vector r, the vector projection onto n is n*n·r/(|n|^2)
k ty
np, don't forget that the formula I wrote is for the projection, which you have to subtract from r
yeh
@forest dove Hey, sorry I had to go. Tremendous thanks for your help. I think I'll go through those exercises myself and see if I can't figure it out fully. Huge thanks again!
Hi,
I move my question over to this server since I guess it's not really an advanced math question.
say I have a point A as well as a circle B. I now want to enclose the circle with a cone relative to A (i.e. the tangents, λr & λf, in the attached image) What's the approach to calculate said tangents ? I know the position of A, the center of B as well as the radius of B.
the length of the tangents? or the lines specifically?
i don't care about the length
I pretty much want the directional vectors
if that makes sense
well we can write any line in the plane as ax+by=c
rearrange for y in terms of x
substitute into (x-m)^2 + (y-n^2) = r^2
should get a quadratic in x
set discriminant = 0
rearrange for y in terms of x what does that mean ?
y = (c-ax)/b
ah, sorry I'm not a native english speaker. What does substitute intomean ? what do I substitute ?
So you replace all of your y values with (c-ax)/b
yeah, that
oh, but what's m now ?
centre of the circle is (m,n)
does that mean the resulting function is
(x-m)^2 + ( ((c-ax)/b) -n^2) = r^2
?
(x-m)^2 + ( ((c-ax)/b) -n)^2 = r^2
Should be this I think
set discriminant = 0
and this means to get r^2 on the other side of the equals sign, and replace it with 0 ?
I feel like there has to be a word for this idea, does anyone know it?
Basically, to me it feels like length, area, and volume are just different specific cases of a broader category of "how much space does this take up."
Length is the one-dimensional version
Area is the two-dimensional version
Volume is the three-dimensional version
These things feel very strongly related. What is the abstract version, the word for the nth-dimensional form of this idea?
You can generalize each as the n-th iterated integral within an n-dimensional manifold. This allows one to define these ideas for upper dimensions.
Yep, that'll work, but I'm most interested in what this category of "thing" is called
A sort of fill-in-the-blank:
"Length is the one-dimensional version of ____"
The term that comes to my mind for higher dimensions is n-volume
But I doubt that's satisfying.
Ahhh, see, I suspected that from my quick wikipedia dive
But seeing as how "volume" is "the 3-dimensional version of <thing>," it is an unsatisfying word choice to use a specific case as the name of the general phenomenon
I was hopeful there was something more flowery, even if it would never be used in any practical context.
Alternatively, you could think of volume as the general term, but we have unique other terms for the 2 and 1 dimensional versions.
^ that's how I like to think of it
You know what, I like that --- I think I'll switch to that mentality. Thank you!
Hm, but then "volume" becomes ambiguous with "3-volume"
Oh boy
Does anybody here have an opinion on either of Spanier's or Rotman's textbooks on algebraic topology?
I've started using Rotman, didn't yet dedicate enough time to get far but I really like it
Spanier's apparently really hard
Are the first 4 chapters of Munkres enough general topology to learn algebraic topology?
Or must I also learn the metrization theorems, complete metric/function spaces, and baire spaces?
Probably not. Function spaces meaning compact-open topology is relevant in a way but I think it can be black boxed
Basically, you think of currying functions, like how a function from X x Y to Z is a function from X to the set of functions from Y to Z
I think there's some weird point-set condition that practically everything satisfies (compactly generated and weak Hausdorff are words I've heard to this effect) where if you put the compact open topology on function spaces, this is a homeomorphism
Otherwise I think you can go about life nicely without worrying about fancy point-set
@upper karma first 4 chapters of munkres should definitely be enough to start learning alg top. you can always learn those other things later when you come across them later (which you probably won't for a while).
@forest dove @sly crane thank you for the guidance
also, i'd look into hatcher's book. it is really good.
and if you are interested in a more differential point view, bredon's topology and geometry is great
@sly crane I heard that Hatcher's use of Delta-complexes is uncommon and that he doesn't use as much rigor or category theory as other authors
@upper karma hatcher is not lacking rigor at all. his book is just full of other things as well (examples, motivation, intuition). hatcher may not use as much category theory, but he definitely introduces when it is really necessary.
also, i would not worry about the delta-complex thing. delta-complexes are just a small generalization of simplicial complexes which lead to much more efficient computations. for example, the most efficient simplicial complex structure for a torus has 14 triangles, 21 edges, and 7 vertices, while the natural delta-complex structure has 2 triangles, 3 edges, and 1 vertex. but once you learn how to compute homology with CW-complexes, all this pretty much won't matter.
@sly crane what is it about CW complexes that makes them seemingly preferred to simplicial anyway?
do you want to think of the 9-dimensional sphere S^9 as being composed of 11 9-faces, 55 8-faces, 165 7-faces, 330 6-faces, 462 5-faces, 330 4-faces, 165 triangles, 55 edges, and 11 points glued in a certain way?
or as the 9-dimensional ball with the boundary identified to a point?
Ah, I didn't know that simplicial was that bad. And I imagine these delta complexes are still less efficient on the whole?
yeah, delta-complexes are more general than simplicial complexes, but cw-complexes are much more general than both. they are all similar in that they are ways of build spaces by inductively gluing n-dimensional cells, but they just differ on how you are allowed to glue things
they each have their own advantages and disadvantages
I see
What type of line has an undefined gradient?
Gradients are delta Y/ delta X
When is that undefined?
What sort of fractions aren't allowed?
ok the drawing is cancer dont judge but the equations should be fine
idk if its a correct start but i cant seem to solve them up
{kind=link}

What are we actually solving for?